Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Chapter 5: CPU Scheduling
Operating System Concepts – 8th Edition,
Silberschatz, Galvin and Gagne ©2009
Chapter 5: CPU Scheduling
Basic Concepts
Scheduling Criteria
Scheduling Algorithms
Thread Scheduling
Multiple-Processor Scheduling
Operating Systems Examples
Algorithm Evaluation
Operating System Concepts – 8th Edition
5.2
Silberschatz, Galvin and Gagne ©2009
Objectives
To introduce CPU scheduling, which is the basis for multiprogrammed
operating systems
To describe various CPU-scheduling algorithms
To discuss evaluation criteria for selecting a CPU-scheduling algorithm for a
particular system
Operating System Concepts – 8th Edition
5.3
Silberschatz, Galvin and Gagne ©2009
Basic Concepts
Maximum CPU utilization obtained with multiprogramming
CPU–I/O Burst Cycle – Process execution consists of a cycle of
CPU execution and I/O wait
While a process waits for I/O, CPU sits idle if no multiprogramming
Instead the OS can give CPU to another process
CPU burst distribution
Operating System Concepts – 8th Edition
5.4
Silberschatz, Galvin and Gagne ©2009
Alternating Sequence of CPU And I/O Bursts
Operating System Concepts – 8th Edition
5.5
Silberschatz, Galvin and Gagne ©2009
Histogram of CPU-burst Times
Operating System Concepts – 8th Edition
5.6
Silberschatz, Galvin and Gagne ©2009
CPU Scheduler
Short-term Scheduler
Selects from among the processes in memory that are ready to execute,
and allocates the CPU to one of them
CPU scheduling decisions may take place when a process:
1. Switches from running to waiting state
2. Switches from running to ready state
3. Switches from waiting to ready
4. Terminates
Scheduling under 1 and 4 is nonpreemptive/cooperative
All other scheduling is preemptive
Operating System Concepts – 8th Edition
5.7
Silberschatz, Galvin and Gagne ©2009
CPU Scheduler
Nonpreemptive: Once the process is allocated the CPU, it keeps it until
termination/wait.
eg. Windows 3.x/95
No special hardware (like timers) needed.
Preemptive scheduling – running process can be removed for another
Issues: Shared data consistency – Synchronization (Ch. 6)
What happens when the kernel is in a system call and the process asking
for that call is preempted? UNIX – context switches can only happen after
system calls. Other solutions – Sec 5.5, 19.5
Typically we cannot disable interrupts
Operating System Concepts – 8th Edition
5.8
Silberschatz, Galvin and Gagne ©2009
Dispatcher
Dispatcher module gives control of the CPU to the process
selected by the short-term scheduler; this involves:
switching context
switching to user mode
jumping to the proper location in the user program to restart
that program
Dispatch latency – time it takes for the dispatcher to stop one
process and start another running
Operating System Concepts – 8th Edition
5.9
Silberschatz, Galvin and Gagne ©2009
Scheduling Criteria
CPU utilization – keep the CPU as busy as possible
Throughput – # of processes that complete their execution per
time unit
Turnaround time – amount of time to execute a particular process
Waiting time – amount of time a process has been waiting in the
ready queue
Response time – amount of time it takes from when a request was
submitted until the first response is produced, not output (for timesharing environment)
Operating System Concepts – 8th Edition
5.10
Silberschatz, Galvin and Gagne ©2009
Scheduling Algorithm Optimization Criteria
Max CPU utilization
Max throughput
Min turnaround time
Min waiting time
Min response time
Operating System Concepts – 8th Edition
5.11
Silberschatz, Galvin and Gagne ©2009
Scheduling Algorithms
First-Come, First-Served Scheduling
Shortest-Job-First Scheduling
Priority Scheduling
Round-Robin Scheduling
Multilevel Queue Scheduling
Multilevel Feedback Queue Scheduling
Operating System Concepts – 8th Edition
5.12
Silberschatz, Galvin and Gagne ©2009
First-Come, First-Served (FCFS) Scheduling
Process
Burst Time
P1
24
P2
3
P3
3
Suppose that the processes arrive in the order: P1 , P2 , P3
The Gantt Chart for the schedule is:
P1
P2
0
24
P3
27
30
Waiting time for P1 = 0; P2 = 24; P3 = 27
Average waiting time: (0 + 24 + 27)/3 = 17
Operating System Concepts – 8th Edition
5.13
Silberschatz, Galvin and Gagne ©2009
FCFS Scheduling (Cont)
Suppose that the processes arrive in the order
P2 , P3 , P1
The Gantt chart for the schedule is:
P2
P3
P1
0
3
6
Waiting time for P1 = 6; P2 = 0; P3 = 3
30
Average waiting time: (6 + 0 + 3)/3 = 3
Much better than previous case
Convoy effect short process behind long process – open CPU bound
process followed by multiple I/O processes.
Nonpreemptive
Operating System Concepts – 8th Edition
5.14
Silberschatz, Galvin and Gagne ©2009
Shortest-Job-First (SJF) Scheduling
Associate with each process the length of its next CPU burst. Use these
lengths to schedule the process with the shortest time
If burst times are the same – break ties using FCFS
SJF is provably optimal – gives minimum average waiting time for a given
set of processes
Reasoning – move the short process before a long one. This decreases
the waiting time of the short process more than it increases the waiting
time of the long one. Hence the average decreases.
The difficulty is knowing the length of the next CPU request
Operating System Concepts – 8th Edition
5.15
Silberschatz, Galvin and Gagne ©2009
Example of SJF
Process
Arrival Time
Burst Time
P1
0.0
6
P2
2.0
8
P3
4.0
7
P4
5.0
3
SJF scheduling chart
P4
0
P3
P1
3
9
P2
16
24
Average waiting time = (3 + 16 + 9 + 0) / 4 = 7
Operating System Concepts – 8th Edition
5.16
Silberschatz, Galvin and Gagne ©2009
Determining Length of Next CPU Burst
Can only estimate the length
Can be done by using the length of previous CPU bursts, using exponential
averaging
1. t n actual length of n th CPU burst
2. n 1 predicted value for the next CPU burst
3. , 0 1
4. Define :
Operating System Concepts – 8th Edition
n1 tn 1 n .
5.17
Silberschatz, Galvin and Gagne ©2009
Prediction of the Length of the Next CPU Burst
Operating System Concepts – 8th Edition
5.18
Silberschatz, Galvin and Gagne ©2009
Examples of Exponential Averaging
=0
n+1 = n
Recent history does not count
=1
n+1 = tn
Only the actual last CPU burst counts
If we expand the formula, we get:
n+1 = tn+(1 - ) tn -1 + …
+(1 - )j tn -j + …
+(1 - )n +1 0
Since both and (1 - ) are less than or equal to 1, each successive term
has less weight than its predecessor
Can be preemptive or nonpreemptive
Operating System Concepts – 8th Edition
5.19
Silberschatz, Galvin and Gagne ©2009
Priority Scheduling
A priority number (integer) is associated with each process
The CPU is allocated to the process with the highest priority (smallest
integer highest priority)
Preemptive
nonpreemptive
SJF is a priority scheduling where priority is the predicted next CPU burst
time
Problem Starvation – low priority processes may never execute
Solution Aging – as time progresses increase the priority of the process
Operating System Concepts – 8th Edition
5.20
Silberschatz, Galvin and Gagne ©2009
Round Robin (RR)
Each process gets a small unit of CPU time (time quantum),
usually 10-100 milliseconds. After this time has elapsed, the
process is preempted and added to the end of the ready queue.
If there are n processes in the ready queue and the time
quantum is q, then each process gets 1/n of the CPU time in
chunks of at most q time units at once. No process waits more
than (n-1)q time units.
Performance
q large FIFO
q small q must be large with respect to context switch,
otherwise overhead is too high. Also called processor
sharing – appears like each process has a processor
Operating System Concepts – 8th Edition
5.21
Silberschatz, Galvin and Gagne ©2009
Example of RR with Time Quantum = 4
Process
P1
P2
P3
Burst Time
24
3
3
The Gantt chart is:
P1
0
P2
4
P3
7
P1
10
P1
14
P1
18 22
P1
26
P1
30
Typically, higher average turnaround than SJF, but better response
Avg Wait=17/3=5.66
Operating System Concepts – 8th Edition
5.22
Silberschatz, Galvin and Gagne ©2009
Time Quantum and Context Switch Time
Operating System Concepts – 8th Edition
5.23
Silberschatz, Galvin and Gagne ©2009
Turnaround Time Varies With The Time Quantum
Operating System Concepts – 8th Edition
5.24
Silberschatz, Galvin and Gagne ©2009
Multilevel Queue
Ready queue is partitioned into separate queues:
foreground (interactive)
background (batch)
Each queue has its own scheduling algorithm
foreground – RR
background – FCFS
Scheduling must be done between the queues
Fixed priority scheduling; (i.e., serve all from foreground then from
background). Possibility of starvation.
Time slice – each queue gets a certain amount of CPU time which it can
schedule amongst its processes; i.e., 80% to foreground in RR
20% to background in FCFS
Operating System Concepts – 8th Edition
5.25
Silberschatz, Galvin and Gagne ©2009
Multilevel Queue Scheduling
Operating System Concepts – 8th Edition
5.26
Silberschatz, Galvin and Gagne ©2009
Multilevel Feedback Queue
A process can move between the various queues; aging can be
implemented this way
Multilevel-feedback-queue scheduler defined by the following
parameters:
number of queues
scheduling algorithms for each queue
method used to determine when to upgrade a process
method used to determine when to demote a process
method used to determine which queue a process will enter
when that process needs service
Operating System Concepts – 8th Edition
5.27
Silberschatz, Galvin and Gagne ©2009
Example of Multilevel Feedback Queue
Three queues:
Q0 – RR with time quantum 8 milliseconds
Q1 – RR time quantum 16 milliseconds
Q2 – FCFS
Scheduling
A new job enters queue Q0 which is served FCFS. When it gains CPU,
job receives 8 milliseconds. If it does not finish in 8 milliseconds, job is
moved to queue Q1.
At Q1 job is again served FCFS and receives 16 additional milliseconds.
If it still does not complete, it is preempted and moved to queue Q2.
Operating System Concepts – 8th Edition
5.28
Silberschatz, Galvin and Gagne ©2009
Multilevel Feedback Queues
Operating System Concepts – 8th Edition
5.29
Silberschatz, Galvin and Gagne ©2009
Thread Scheduling
Distinction between user-level and kernel-level threads
OS only schedules kernel-level threads. User-level threads are
scheduled through a direct or indirect (LWP) mapping
Many-to-one and many-to-many models, thread library schedules
user-level threads to run on LWP
Known as process-contention scope (PCS) since scheduling
competition is within the process
Kernel thread scheduled onto available CPU is system-contention
scope (SCS) – competition among all threads in system
Typically – PCS is priority based. Programmer can set user-level
thread priorities
Operating System Concepts – 8th Edition
5.30
Silberschatz, Galvin and Gagne ©2009
Pthread Scheduling
API allows specifying either PCS or SCS during thread creation
PTHREAD_SCOPE_PROCESS schedules threads using PCS
scheduling
PTHREAD_SCOPE_SYSTEM schedules threads using SCS
scheduling.
2 methods to get and set the scope
pthread_attr_setscope(pthread_attr_t *attr, int scope)
pthread_attr_getscope(pthread_attr_t *attr, int *scope)
attr – pointer to the attribute set
scope – PSC/SCS
Operating System Concepts – 8th Edition
5.31
Silberschatz, Galvin and Gagne ©2009
Pthread Scheduling API
#include <pthread.h>
#include <stdio.h>
#define NUM THREADS 5
int main(int argc, char *argv[])
{
int i;
pthread_t tid[NUM THREADS];
pthread_attr_t attr;
/* get the default attributes */
pthread_attr init(&attr);
/* set the scheduling algorithm to PROCESS or SYSTEM */
pthread_attr setscope(&attr, PTHREAD_SCOPE_SYSTEM);
/* set the scheduling policy - FIFO, RT, or OTHER */
pthread_attr setschedpolicy(&attr, SCHED_OTHER);
/* create the threads */
for (i = 0; i < NUM THREADS; i++)
pthread create(&tid[i],&attr,runner,NULL);
Operating System Concepts – 8th Edition
5.32
Silberschatz, Galvin and Gagne ©2009
Pthread Scheduling API
/* now join on each thread */
for (i = 0; i < NUM THREADS; i++)
pthread join(tid[i], NULL);
}
/* Each thread will begin control in this function */
void *runner(void *param)
{
printf("I am a thread\n");
pthread exit(0);
}
Operating System Concepts – 8th Edition
5.33
Silberschatz, Galvin and Gagne ©2009
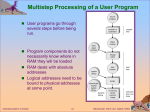
Multiple-Processor Scheduling
CPU scheduling more complex when multiple CPUs are
available
ASSUMPTION - Homogeneous processors within a
multiprocessor
Asymmetric multiprocessing – only one processor
accesses the system data structures, alleviating the need
for data sharing
Problems – Bottleneck, Single point of failure
Symmetric multiprocessing (SMP) – each processor
is self-scheduling, all processes in common ready queue,
or each has its own private queue of ready processes\
Most common – Windows XP, 2000, Linux, OS X
Remainder of the discussion applies to SMP.
Operating System Concepts – 8th Edition
5.34
Silberschatz, Galvin and Gagne ©2009
Multiprocessor Scheduling
Processor affinity – process has affinity for processor on which it is
currently running
Reason – caching. As a process runs, the cache gets populated and it is
increasingly likely that the requests will be satisfied from the cache.
soft affinity
OS tries to keep the process running on the same processor, but this is
not binding.
Migration possible.
hard affinity
Supported in Linux. Allows a process to specify this.
Solaris supports the creation of processor sets. Also soft but somewhat
more restricted.
Operating System Concepts – 8th Edition
5.35
Silberschatz, Galvin and Gagne ©2009
Multiprocessor Scheduling
Affinity may be decided by the architecture of the main-memory.
NUMA – Non Uniform Memory Access
CPU has faster access to some memory.
Multiprocessors systems where each CPU has a memory board.
It can also access memory on other CPU’s but there is a delay
OS design influenced by the architecture and optimized for performance
Operating System Concepts – 8th Edition
5.36
Silberschatz, Galvin and Gagne ©2009
NUMA and CPU Scheduling
Operating System Concepts – 8th Edition
5.37
Silberschatz, Galvin and Gagne ©2009
Load Balancing
Goal: Keep workload evenly distributed between processors
Usually only necessary if each processor has its own individual queue
If there is a common queue, a processor can just pick a job from here when
free
Push migration – specific task to check load on each processor and
redistribute if needed.
Pull migration – idle processor pulls task form a busy one.
Usually both are implemented in parallel. Eg. Linux scheduler
Note that this conteracts with affinity.
Operating System Concepts – 8th Edition
5.38
Silberschatz, Galvin and Gagne ©2009
Multicore Processors
Recent trend to place multiple processor cores on same physical chip
Each core has its own register set
Faster and consume less power
Multiple threads per core also growing
Takes advantage of memory stall to make progress on another thread
while memory retrieve happens
Memory stalls – can be upto 50% of the time
Solution – Multithreaded Multicores
Operating System Concepts – 8th Edition
5.39
Silberschatz, Galvin and Gagne ©2009
Multithreaded Multicore System
Operating System Concepts – 8th Edition
5.40
Silberschatz, Galvin and Gagne ©2009
Multithreaded Multicore
Coarse-grained
More cost with switching between threads
Fine-grained
Much finer level of granularity in switching between threads – logic for
thread switching included in architecture
2 levels of scheduling are happening here.
Operating System Concepts – 8th Edition
5.41
Silberschatz, Galvin and Gagne ©2009
Operating System Examples
Solaris scheduling
Windows XP scheduling
Linux scheduling
Operating System Concepts – 8th Edition
5.42
Silberschatz, Galvin and Gagne ©2009
Solaris Scheduling
Priority based thread scheduling with 6 classes:
Time sharing
Interactive
Real Time
System
Fair Share
Fixed Priority
Default class for a process is Time Sharing
TS – dynamic priorities and slice lengths using a multilevel queue
Eg. Shown for different priorities
Operating System Concepts – 8th Edition
5.43
Silberschatz, Galvin and Gagne ©2009
Solaris Dispatch Table
Operating System Concepts – 8th Edition
5.44
Silberschatz, Galvin and Gagne ©2009
Solaris Dispatch Table
Priority – Higher number, Higher Priority
Quantum length inversely proportional to Priority
Time Quantum expired – new priority for thread that has used its entire
quantum without blocking (CPU intensive threads)
Return from sleep – Priority of a thread returning from a sleep state eg.
Waiting for I/O. When I/O is available its priority is boosted
Operating System Concepts – 8th Edition
5.45
Silberschatz, Galvin and Gagne ©2009
Solaris Scheduling
Operating System Concepts – 8th Edition
5.46
Silberschatz, Galvin and Gagne ©2009
Windows XP Scheduling
32-level priority scheme to determine order of execution
Split into two classes
Variable class – 1-15
Real-time class – 16-31
Several Priority classes in the API, followed by relative priority within a class
Variable priorities
Typically priority of the foreground process is increased – usually by 3
Operating System Concepts – 8th Edition
5.47
Silberschatz, Galvin and Gagne ©2009
Windows XP Priorities
Operating System Concepts – 8th Edition
5.48
Silberschatz, Galvin and Gagne ©2009
Linux Scheduling
Constant order O(1) scheduling time
Regardless of number of tasks
Two priority ranges: time-sharing(nice) and real-time
Real-time range from 0 to 99 and nice value from 100 to 140
Lower values -> Higher priorities
Unlike Solaris, Higher priority is given Larger Time slice
Operating System Concepts – 8th Edition
5.49
Silberschatz, Galvin and Gagne ©2009
Priorities and Time-slice length
Operating System Concepts – 8th Edition
5.50
Silberschatz, Galvin and Gagne ©2009
List of Tasks Indexed According to Priorities
Operating System Concepts – 8th Edition
5.51
Silberschatz, Galvin and Gagne ©2009
Algorithm Evaluation
Deterministic modeling – takes a particular
predetermined workload and defines the performance of
each algorithm for that workload eg. Calculating the
average wait time for each model
Queueing models
Implementation
Operating System Concepts – 8th Edition
5.52
Silberschatz, Galvin and Gagne ©2009
Analytical Evaluation
Operating System Concepts – 8th Edition
Processes
Burst Time
P1
10
P2
29
P3
3
P4
7
P5
12
5.53
Silberschatz, Galvin and Gagne ©2009
FCFS Wait time=(0+10+39+42+49)/5=28ms
SJF Wait time=(10+32+0+3+20)/5=13 ms
RR Wait time=(0+32+20+23+40)/5=23 ms
Operating System Concepts – 8th Edition
5.54
Silberschatz, Galvin and Gagne ©2009
Queuing Network Analysis
Processes are dynamic and cannot be estimated
But CPU and I/O burst distributions can be
Formula estimating the probability of a particular burst
Similarly arrival times can be shown by a distribution
Given these two distributions, possible to compute avg throughput,
utilization, waiting time etc.
Let n : avg. queue length
W : avg wait time in the queue
: Avg Arrival Rate
n=xW
Little’s Formula
If the system is steady, number entering must be equal to number leaving
Operating System Concepts – 8th Edition
5.55
Silberschatz, Galvin and Gagne ©2009
Evaluation of CPU schedulers by Simulation
Operating System Concepts – 8th Edition
5.56
Silberschatz, Galvin and Gagne ©2009
End of Chapter 5
Operating System Concepts – 8th Edition,
Silberschatz, Galvin and Gagne ©2009