Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
History of geomagnetism wikipedia , lookup
Post-glacial rebound wikipedia , lookup
Radio navigation wikipedia , lookup
Global Energy and Water Cycle Experiment wikipedia , lookup
Large igneous province wikipedia , lookup
Interferometric synthetic-aperture radar wikipedia , lookup
Magnetotellurics wikipedia , lookup
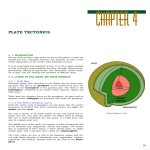
Plate tectonics wikipedia , lookup
GPS and its Application to Geodynamics in East Africa Eric Calais Purdue University, West Lafayette, IN, USA [email protected] The distribution of earthquakes is not random Ocean-ocean subduction island arc Transform fault strike-slip motion lithosphere viscous mantle Oceanic spreading center creation of new oceanic crust Ocean-continent subduction volcanism Continental rift break-up of a continent lithosphere viscous mantle Tectonic plates are rigid and float on a viscous mantle. Earthquakes occur at their boundaries: divergent (rifts and oceanic spreading centers), convergent (subductions), or strike-slip The Earth’s rigid shell (= lithosphere) is made of ~15 major plates Notice the lack of plate boundary through East Africa…! In Summary… • We know: – Plate tectonics as a kinematic theory that describes the motion of (rigid) plates at the surface of the Earth • We do not know: – The present-day motion of all plates – Why plates move the way they do (dynamics) • We need: – Accurate techniques to measure present-day motions of the Earth’s lithosphere – Physical models that explain the dynamics of the system (= kinematics + rheology) The Global Positioning System • Three steps: 1. Satellites broadcast a radio signal towards the Earth 2. Receivers record the signal and convert it into satellitereceiver distances 3. Post-processing consist of converting these distances into positions • Precision: $100 receiver 100 m $10,000 receiver 1 mm Principle of GPS positioning • Satellites broadcast signals on 1.2 GHz and 1.5 GHz frequencies: – Satellite 1 sends a signal at time te1 – Ground receiver receives it signal at time tr – The range measurement r1 to satellite 1 is: r1 = (tr-te1) x speed of light – We are therefore located on a sphere centered on satellite 1, with radius r1 – 3 satellites => intersection of 3 spheres satellite 2 rr2 2 • Or use the mathematical model: r ( X s X r ) (Ys Yr ) (Z s Z r ) s r 2 2 – Time difference between the satellite clocks and the receiver clock – Additional unknown => we need 4 observations = 4 satellites visible at the same time r1 r3 2 • A! The receiver clocks are mediocre and not synchronized with the satellite clocks satellite 1 satellite 3 You are here x Earth Principle of GPS positioning • GPS data = satellite-receiver range measurements (r) • Range can be measured in two ways: te ~ 20 cm 1. Measuring the propagation time of the GPS signal: • • • Easy, cheap Limited post-processing required As precise as the time measurements ~1-10 m tr 2. Counting the number of cycles of the carrier frequency • • • More difficult Requires significant postprocessing As precise as the phase detection ~1 mm x Earth From codes: data = (tr-te) x c (unit = meters) From carrier: data = x n (unit = cycles) Principle of GPS positioning GPS phase equation (units of cycles): ki (t) rik (t) f h k (t) hi (t) f ion ik (t) tropik (t) N ik c Range model: rik (X k X i )2 (Y k Yi )2 (Z k Zi )2 = phase measurement = DATA rik = geometric range = CONTAINS UNKNOWNS Xi,Yi,Zi Xk,Yk,Zk = satellite positions (GIVEN) t = time of epoch i = receiver, k = satellite f = GPS frequency, c = speed of light hk = satellite clock error, hi receiver clock error ionik ionospheric delay, tropik tropospheric delay Nik = phase ambiguity, = phase noise Phase equation linearized Form a system of n_data equations for n_unknowns (positions, phase ambiguities, tropospheric parameters) Solve using weighted least squares (or other estimation techniques) End product: position estimates + associated covariance Principle of GPS positioning Error source Treatment Magnitude Phase measurement noise None < 1 mm Satellite clocks errors Double difference or direct estimation ~1 m Receiver clock errors Double difference or direct estimation meters Tropospheric refraction External measurement or estimation of “tropospheric parameters” 0.5-2 m Ionospheric refraction Dual frequency measurements 1-50 m Satellite orbits Get precise (2-3 cm) orbits 2 cm to 100 m Geophysical models Tides (polar and solid Earth), Ocean loading centimeters Geodetic models Precession, Nutation, UT, Polar motion centimeters Antenna phase center Use correction tables ~ 1 cm Multipath Choose good sites! ~ 0.5 m Site setup Choose good operators! ??? Precise GPS positioning requires: • Dual-frequency equipment • Rigorous field procedures • Long (several days) observation sessions • Complex data post-processing Campaign measurements Field strategy: – Network of geodetic benchmarks perfectly attached to bedrock -- Separation typically 10-100 km – 2 to 3 measurement sessions of 24 hours Advantages: – Large number/density of sites with few receivers – Relatively low cost Problems: – Transient deformation – Monumentation and antenna setup Continuous measurements Typical setup: – Antenna mounted permanently on a stable geodetic monument, measurements 24h/day, 365 days/year – Site protected and unattended – Data downloaded daily or more frequently if needed (and if possible) Advantages: – Better long-term precision – Better detection of transient signals Problems: – Cost and number of sites – Power and communication GPS time series • Processing strategy: – GPS data (phase and pseudorange) processed in daily sessions – Use of precise orbits and Earth Orientation Parameters from the IGS – Use of additional continuous sites with well-defined position and velocity in ITRF • Output: – 1 position per day (per site) – Associated uncertainty – Successive daily positions times series – Slope = long-term site velocity due to tectonic motions From positions to velocities • Velocity can be estimated by combining several measurement epochs with the following model: known position at epoch s (in reference frame s) = unknown (final) position (in final reference frame) + unknown (final) velocity (in final reference frame) transformation between final reference frame and reference frame at epoch s (T = translation, D = scale factor, R = rotation) + position + velocity i i i i i i X si X comb (t s t comb ) XÝcomb T DX comb RX comb (t s t comb )TÝ DÝX comb RÝX comb • • The model is linear X, X, T, D, R, T, D, R can be estimated using standard least squares and error propagation. As such, problem is rank deficient (datum defect) define a frame by fixing or constraining the position and velocity of a subset of sites to known values, for instance from International Terrestrial Reference Frame (ITRF) REVEL GPS plate model Sella et al., JGR 2002 • Velocities are shown with arrows • Expressed with respect to ITRF = absolute reference frame • Can be used to quantify plate motions From velocities to plate motions • The motion of “plates” (= spherical caps) can be described by: – A pole of rotation (lat, lon), also called Euler pole – An angular velocity (deg/My) • Or by a rotation vector W: – Origin at the Earth’s center, passes through Euler pole – Length = scalar angular velocity • Relation between horizontal velocity at a given site (position described by unit vector Pu) and rotation vector W : V R W Pu (R = mean Earth’s radius) Plate motions, inverse problem • • For a given site, linear equation: X X Z y Y z V RY Y RX z Z x Z Z Y x X y W • If at least 2 sites with velocities, the problem is over-determined and can be solved using least squares (L = data vector, W = data weight matrix): W (AT CV1 A)1 AT CV1L P Or in matrix form: vx 0 Z Y x vy R Z 0 X y vz Y X 0 z or V AW • The model covariance matrix is: CW (AT CV1 A)1 Plate kinematics and deep mantle structures Color arrows: motion of adjacent plates with respect to Nubia (Sella et al., 2002). Black arrows: Nubian plate motion in a hot spot frame (Gripp and Gordon, 2002) Behn et al., 2004: Arrows = mantle flow field, colors = seismic velocity anomalies. Top = map view at the base of the lithosphere (300 km), bottom: crosssection of S20RTS (Ritsema et al.) Regional tectonics and upper mantle structures Nyblade et al. (2000): Top = cross-section of tomographic model (Ritsema et al., 1998) with stacked receiver function superimposed. Bottom: schematic interpretation. Nubia/Somalia kinematics • Very few continuous GPS sites on Nubian and Somalian plates Nubia-Somalia relative motion still poorly constrained • Two plates: – Nubia = MAS1, NKLG, SUTH, SUTM, GOUG (ZAMB, HRAO, HARB) – Somalia = MALI, HIMO, SEY1, REUN • Euler pole between South Africa and SW Indian Ridge NubiaSomalia extension rate increases from S to N • Discrepancy at MBAR (Work by Saria Elifuraha) EAR kinematics • Seismicity + active faults 2 possible microplates within the EAR • Data: – GPS, MBAR on Victoria + SNG1 on Rovuma – Earthquake slip vectors • Invert GPS + slip vectors for block motions • Results: – Somalia: consistent with previous estimates – Victoria: CCW rotation – Rovuma: CW rotation (Work by Sarah Stamps) Summary • • 2 major plates, divergence rate increases from 3 to 6 mm/yr from S to N. GPS + slip vector data consistent with: – – • WARNINGS: – – – • Strain focused along narrow rift valleys 2 undeformed domains: Victoria and Rovuma microplates Model Constrained by very few GPS data Needs to be tested/improved Dynamics of Victoria pl.? Conclusions • Kinematics: – Combination of (limited) GPS data set + earthquake slip vectors preliminary kinematic model for Nubia/Somalia + 2 microplates (Victoria and Rovuma) – Model will be refined using new GPS data in Tanzania. – Next GPS campaigns = August 2008 and 2010. • Dynamics: – Combine kinematic model with other tectonic indicators, seismic anisotropy data, mantle and lithospheric structures (tomography, xenoliths, etc.) – Geodynamic modeling: driving forces, mantle-lithosphere interactions. • Broader impacts: – – – – Establishment of new national geodetic network Establishment of new IGS site Training and collaborative research Other research projects: geoid, datum transformations, vertical motions, etc… Acknowledgments • Partners: – University College for Lands and Architectural Studies – Survey and Mapping Division, Ministry of Lands and Human Settlement – Department of Geology, University of Dar Es Salaam – Department of Earth and Atmospheric Sciences, Purdue University – Department of Geology, Rochester University – Hartebeesthoek Radio Astronomy Observatory, South Africa – Royal Museum for Central Africa, Belgium – Universite de Bretagne Occidentale, IUEM, France • Technical Support from UNAVCO (www.unavco.org) • A project funded by the National Science Foundation (www.nsf.org)