Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Renormalization group wikipedia , lookup
Plateau principle wikipedia , lookup
Computer simulation wikipedia , lookup
Signals intelligence wikipedia , lookup
Inverse problem wikipedia , lookup
Theoretical ecology wikipedia , lookup
Perceptual control theory wikipedia , lookup
Relativistic quantum mechanics wikipedia , lookup
Perturbation theory wikipedia , lookup
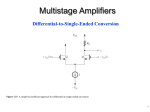
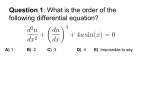
EE102 – SYSTEMS & SIGNALS Fall Quarter, 2001. Instructor: Fernando Paganini. Signal: Function that describes the evolution of a variable with time. • Examples: – Voltage across an electrical component. + V(t) _ – Position of a moving object. x(t) Sound = pressure of the air outside your ear p • Information lies in the time evolution. t • The signal can be converted to and from other domains: Electrical (in a stereo), electro-chemical (in your brain). • What matters is the mathematical structure. Signal examples (cont): • Population of a species over time (decades) • Daily value of the Nasdaq Time can be continuous (a real number) or discrete (an integer). This course focuses on continuous time. System: component that establishes a relationship between signals • Example: circuit Is R3 V1 R1 Vs R2 Relationship between voltages and currents. Io Systems: examples • Car: Relationship between signals: – Throttle/brake position – Motor speed – Fuel concentration in chamber – Vehicle speed. – … • Ecosystem: relates populations, … • The economy: relates GDP, inflation, interest rates, stock prices,… • The universe… Math needed to study signals & systems? Example 1: static system Vs I R1 R2 Vo R1 Vs R2 I Vs R2 V0 R1 R2 • Not much math there… • Time does not enter in a fundamental way. Example 2: dynamical system Vo R Vs C I dV0 IC dt Vs V0 R I • Switch closes at t=0. • For t >= 0, we have the differential equation (ODE) dV0 Vs V0 R C dt t RC Solution: V0 Vs 1 e Time is essential here. Dynamic, differential equation models appear in many systems • Mechanical system, e.g. the mass-spring 2 system d x m dt 2 k x 0 • Chemical reactions • Population dynamics • Economic models The issue of complexity • Consider modeling the dynamic behavior of – An IC with millions of transistors – A biological organism • “Reductionist” method: zoom in a component, write a differential equation model, combine them into an overall model. • Difficulty: solving those ODE’s is impossible; even numerical simulation is prohibitive. • Even harder: design the differential equation (e.g., the circuit) so that it has a desired solution. The “black box” concept x y • Idea: describe a portion of a system by a inputoutput (cause-effect) relationship. • Derive a mathematical model of this relationship. This can involve ODEs, or other methods we will study. Make reasonable approximations. • Interconnect these boxes to describe a more complex system. Definition: Input-Output System y x • The input function x(t) belongs to a space X, and can be freely manipulated from outside. • The output function y(t) varies in a space Y, and is uniquely determined by the input function. • The relationship between input and output is described by a transformation T between X and Y. Notation: y ( t ) T x (t ) or y ( ) T x( ) Example: RC circuit as an input-output system + + R x(t) y(t) C _ dy x y RC dt _ • We assume here that time starts at t=0, y(0) = 0 • To represent the mapping from x to y explicitly, we must solve the differential equation dy y x, dt 1 Here RC y 0 0, Solution of dy y x, dt y 0 0, • First, solve homogeneous equation Solution: y (t ) Ce t dy y 0 dt • Next, look for a solution of the non-homogeneous equation. One method: “Variation of constants”, try a solution of the form t y (t ) C (t )e dy dC t t e C (t ) e dt dt dy dC t y e dt dt Solution of dy y x, dt dy dC t y e x dt dt t y 0 0, dC t e x (t ) dt C (t ) C (0) e x( )d 0 t y (t ) C (t )et etC (0) e ( t ) x( )d 0 t Using initial condition y(0)=0, y (t ) e 0 Input-output representation, y = T[x] ( t ) x( )d