Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Distributed control system wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Computer science wikipedia , lookup
Fault tolerance wikipedia , lookup
Electrical engineering wikipedia , lookup
Buck converter wikipedia , lookup
Computer program wikipedia , lookup
Time-to-digital converter wikipedia , lookup
Electronic engineering wikipedia , lookup
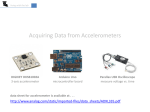
Senior Project – Electrical and Computer Engineering – 2006 Autonomous Navigation of an Indoor Blimp Stuart Wehrly Advisor – Prof. Spinelli Abstract: An autonomous navigation system was designed to allow an indoor Blimp to follow a predetermined flight path. Such Blimps are normally controlled remotely by a human operator. Designing an autonomous control system was challenging due to the extreme weight restrictions imposed by the small size of the helium bag. The merits of computer processing using a nearby wireless computer were compared to having all decision making on the Blimp itself. An accelerometer and a rangefinder were used to keep track of the position of the Blimp and to detect if it nears or contacts any obstacles. Goals: Design Constraints: •Maintain constant height from floor •Total weight of components must weigh less than 7 ounces •Move from point A to point B •Autonomous navigation Achievements: •Detect obstacles in path •Maintain constant height from floor by constantly polling •Calculate position in real time from acceleration rangefinder and calculating distance from floor. •Move from point A to point B by calculating position by integrating acceleration twice. Then power motors until current position equals destination Components: •Parallax Basic Stamp II •Analog 3-Axis Accelerometer •5-Volt Regulator •LM317 Variable Voltage Regulator •Analog to Digital Converter with 8 to 1 Multiplexer •LM555 Adjustable Clock Control System Basic Stamp II Blimp Motors Analog to Digital Converter Rangefinder 3-Axis Accelerometer Clock