Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Immunity-aware programming wikipedia , lookup
Ground (electricity) wikipedia , lookup
Ground loop (electricity) wikipedia , lookup
Spark-gap transmitter wikipedia , lookup
Stepper motor wikipedia , lookup
Transformer wikipedia , lookup
Mercury-arc valve wikipedia , lookup
Power engineering wikipedia , lookup
Electrical ballast wikipedia , lookup
Power inverter wikipedia , lookup
Electrical substation wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Integrating ADC wikipedia , lookup
Three-phase electric power wikipedia , lookup
History of electric power transmission wikipedia , lookup
Transformer types wikipedia , lookup
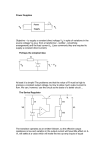
Variable-frequency drive wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Power MOSFET wikipedia , lookup
Current source wikipedia , lookup
Schmitt trigger wikipedia , lookup
Stray voltage wikipedia , lookup
Surge protector wikipedia , lookup
Distribution management system wikipedia , lookup
Power electronics wikipedia , lookup
Voltage optimisation wikipedia , lookup
Alternating current wikipedia , lookup
Mains electricity wikipedia , lookup
Current mirror wikipedia , lookup
Voltage regulator wikipedia , lookup
Opto-isolator wikipedia , lookup
A. B. Linear Regulators Switched Mode Power Supply 1 Linear regulator:- In electronics, a linear regulator is a voltage regulator based on an active device (such as a bipolar junction transistor, field effect transistor or vacuum tube) operating in its "linear region" (in contrast, a switching regulator is based on a transistor forced to act as an on/off switch) or passive devices like zener diodes operated in their breakdown region. The regulating device is made to act like a variable resistor, continuously adjusting a voltage divider network to maintain a constant output voltage. It is very inefficient compared to a switched-mode power supply, since it sheds the difference voltage by dissipating heat. 2 Linear regulators exist in two basic forms: series regulators and shunt regulators. Series regulators are the more common form. The series regulator works by providing a path from the supply voltage to the load through a variable resistance. The power dissipated by the regulating device is equal to the power supply output current times the voltage drop in the regulating device. The shunt regulator works by providing a path from the supply voltage to ground through a variable resistance .The current through the shunt regulator is diverted away from the load and flows uselessly to ground, making this form even less efficient than the series regulator. It is, however, simpler, sometimes consisting of just a voltage-reference diode(Simple zener regulator), and is used in very lowpowered circuits where the wasted current is too small to be of concern. 3 The Basic Linear Regulator 4 The output voltage is controlled using a feedback loop, which requires some type of compensation to assure loop stability. Most linear regulators have built-in compensation, and are completely stable without external components. The design limit of the current source defines the maximum load current the regulator can source and still maintain regulation. Another characteristic of any linear regulator is that it requires a finite amount of time to "correct" the output voltage after a change in load current demand. This "time lag” defines the characteristic called transient response 5 Control Loop Operation 6 The pass device (Q1) in this regulator is made up of an NPN Darlington driven by a PNP transistor .The current flowing out the emitter of the pass transistor (which is also the load current IL) is controlled the voltage error amplifier. The feedback loop which controls the output voltage is obtained by using R1 and R2 to "sense" the output voltage. The feedback loop action continuously holds the regulated output at a fixed value which is a multiple of the reference voltage (as set by R1 and R2), regardless of changes in load current. 7 Linear Regulator Types There are three basic types of linear regulator designs which will be covered: Standard (NPN Darlington) Regulator Low Dropout or LDO Regulator Quasi LDO Regulator 8 The single most important difference between these three types is the dropout voltage, which is defined as the minimum voltage drop required across the regulator to maintain output voltage regulation. The LDO requires the least voltage across it, while the Standard regulator requires the most. The second important difference between the regulator types is the ground pin current required by the regulator when driving rated load current. The Standard regulator has the lowest ground pin current, while the LDO generally has the highest. Increased ground pin current is undesirable since it is "wasted" current, in that it must be supplied by the source but does not power the load. 9 THE LOW-DROPOUT (LDO) REGULATOR 12 The minimum voltage drop required across the LDO regulator to maintain regulation is just the voltage across the PNP transistor:- The maximum specified dropout voltage of an LDO regulator is usually about 0.7V to 0.8V at full current, with typical values around 0.6V. The LDO regulator has the lowest (best) dropout voltage specification of the three regulator types. The ground pin current in an LDO regulator is approximately equal to the load current divided by the gain of the single PNP transistor. Consequently, the ground pin current of an LDO is the highest of the three types. 13 The lower dropout voltage is the reason LDO regulators dominate batterypowered applications, since they maximize the utilization of the available input voltage and can operate with higher efficiency. The explosive growth of battery-powered consumer products in recent years has driven development in the LDO regulator product line. The Standard regulator is usually best for AC-powered applications, where the low cost and high load current make it the ideal choice. In ACpowered applications, the voltage across the regulator is usually at least 3V or more, so dropout voltage is not critical. 16 Selecting the Best Regulator For Your Application The best choice for a specific application can be determined by evaluating the requirements such as: Maximum Load Current Type of Input Voltage Source (Battery or AC) Output Voltage Precision (Tolerance) Quiescent (Idling) Current 17 Switched Mode Supply Circuit. 18 switched mode supply circuit A switched-mode power supply (switching-mode power supply, SMPS, or simply switcher) is an electronic power supply that incorporates a switching regulator in order to be highly efficient. The linear power supply contains a mains transformer and a dissipative series regulator. This means the supply has extremely large and heavy 50/60 Hz transformers, and also very poor power conversion efficiencies, both serious drawbacks. Typical efficiencies of 30% are standard for a linear. This compares with efficiencies of between 70 and 80%, currently available using S.M.P.S. designs. 19 Basic switched mode supply circuit. 20 The ac supply is first rectified, and then filtered by the input reservoir capacitor to produce a rough dc input supply. Fast switching power semiconductor devices such as MOSFETs and Bipolars are driven on and off, and switch the input voltage across the primary of the power transformer. The drive pulses are normally fixed frequency (20 to 200kHz) and variable duty cycle. Hence, a voltage pulse train of suitable magnitude and duty ratio appears on the transformer secondary. This voltage pulse train is appropriately rectified, and then smoothed by the output filter, which is either a capacitor or capacitor / inductor arrangement, depending upon the topology used. 21 Regulation of the output to provide a stabilized dc supply is carried out by the control / feedback block. Generally, most S.M.P.S. systems operate on a fixed frequency pulse width modulation basis, where the duration of the on time of the drive to the power switch is varied on a cycle by cycle basis. This compensates for changes in the input supply and output load. 22 In most applications, the S.M.P.S. topology contains a power transformer. This provides isolation, voltage scaling through the turns ratio, and the ability to provide multiple outputs. However, there are non-isolated topologies where the power processing is achieved by inductive energy transfer alone. Non-Isolated converters:i)BUCK REGULATOR ii)BOOST REGULATOR iii) BUCK-BOOST (INVERTING) REGULATOR. 23 The Buck Converter 24 Operation: The Buck converter uses a transistor as a switch that alternately connects and disconnects the input voltage to an inductor. When switch TR1 is turned on, the input voltage is applied to inductor L1 and power is delivered to the output. Inductor current also builds up according to Faraday’s law shown below:- When the switch is turned off, the voltage across the inductor reverses and freewheel diode D1 becomes forwardbiased. This allows the energy stored in the inductor to be delivered to the output. This continuous current is then smoothed by output capacitor Co. 25 The peak-to-peak difference in the inductor current waveform is referred to as the inductor ripple current, and the inductor is typically selected large enough to keep this ripple current less than 20% to 30% of the rated DC current. Neglecting circuit losses, the average voltage at the inputside of the inductor is (Vin)D, while Vo is the output side voltage. Thus, in the steady state, for the average voltage across the inductor to be zero, the basic dc equation of the buck is simply:- Where D is transistor switch duty cycle, defined as the conduction time divided by one switching period. 26 CONTINUOUS vs. DISCONTINUOUS OPERATION In most Buck regulator applications, the inductor current never drops to zero during full-load operation (this is defined as continuous mode operation).Overall performance is usually better using continuous mode, and it allows maximum output power to be obtained from a given input voltage and switch current rating. Discontinuous mode operation at lower load current values is generally harmless, and even converters designed for continuous mode operation at full load will become discontinuous as the load current is decreased (usually causing no problems). 27 The Boost Converter 28 Operation: The Boost regulator takes a DC input voltage and produces a DC output voltage that is higher in value than the input (but of the same polarity). When the switch is on, diode D1 is reverse biased, and Vin is applied across inductor, L1. Current builds up in the inductor to a peak value. When the switch turns off, the voltage across L1 reverses, causing the voltage at the diode to rise above the input voltage. The diode then conducts the energy stored in the inductor, plus energy direct from the supply to the smoothing capacitor and load. Here Vo and Vi is related as Again, the output only depends upon the input and duty cycle. Thus, by controlling the duty cycle, output regulation is achieved. 29 OUTPUT CURRENT AND LOAD POWER An important design consideration in the Boost regulator is that the output load current and the switch current are not equal, and the maximum available load current is always less than current rating of the switch Transistor. It should be noted that the maximum total power available for conversion in any regulator is equal to the input voltage multiplied times the maximum average input current (which is less than the current rating of the switch transistor). 30 BUCK-BOOST (INVERTING) REGULATOR 31 Operation: The Buck-Boost or Inverting regulator takes a DC input voltage and produces a DC output voltage that is opposite in polarity to the input. The negative output voltage can be either larger or smaller in magnitude than the input voltage. When the switch is on, the input voltage is forced across the inductor, causing an increasing current flow through it. During the on time, the discharge of the output capacitor is the only source of load current. When the switch turns off, the decreasing current flow in the inductor causes the voltage at the diode end to swing negative. This action turns on the diode, allowing the current in the inductor to supply both the output capacitor and the load. Close inspection reveals that the continuous mode dc transfer function is:32 Some of the Standard isolated topologies are below:FLYBACK REGULATOR PUSH-PULL CONVERTER HALF-BRIDGE CONVERTER FULL-BRIDGE CONVERTER 33 Transformers in S.M.P.S. converters 1) Input to output isolation is provided. This is normally always necessary for 220 / 110V mains applications, where a degree of safety is provided for the outputs. 2) The transformer turns ratio can be selected to provide outputs widely different from the input. By selecting the correct turns ratio, the duty cycle of the converter can also be optimized and the peak currents flowing minimized. The polarity of each output is also selectable, dependent upon the polarity of the secondary w.r.t the primary. 3) Multiple outputs are very easily obtained, simply by adding more secondary windings to the transformer. There are some disadvantages with transformers, such as their additional size, weight and power loss. The generation of voltage spikes due to leakage inductance may also be a problem. 34 FLYBACK REGULATOR 35 Operation: The most important feature of the Flyback regulator is the transformer phasing, as shown by the dots on the primary and secondary windings. When the switch is on, the input voltage is forced across the transformer primary which causes an increasing flow of current through it. The dot-negative voltage appearing across the secondary winding turns off the diode, preventing current flow in the secondary winding during the switch on time. During this time, the load current must be supplied by the output capacitor alone. When the switch turns off, the decreasing current flow in the primary causes the voltage at the dot end to swing positive. At the same time, the primary voltage is reflected to the secondary with the same polarity. The dot-positive voltage occurring across the secondary winding turns on the diode, allowing current to flow into both the load and the output capacitor. 36 Converter efficiency = 80%; Max duty cycle, Dmax = 0.45. Max transistor voltage, Max Transistor current, Dc voltage gain:- Applications:- Lowest cost, multiple output supplies in the 20 to 200W range. E.g. mains input T.V. supplies, small computer supplies, E.H.T. supplies. 37 GENERATING MULTIPLE OUTPUTS 38 In this applications, one of the outputs (usually the highest current) is selected to provide PWM feedback to the control loop, which means this output is directly regulated. The other secondary winding(s) are indirectly regulated, as their pulse widths will follow the regulated winding. The load regulation on the unregulated secondaries is not great (typically 5 - 10%), but is adequate for many applications. 39 PUSH-PULL CONVERTER 40 Operation: The converter operates by turning on each transistor on alternate cycles (the two transistors are never on at the same time). Transformer secondary current flows at the same time as primary current (when either of the switches is on). An important characteristic of a Push-Pull converter is that the switch transistors have to be able the stand off more than twice the input voltage: when one transistor is on (and the input voltage is forced across one primary winding) the same magnitude voltage is induced across the other primary winding, but it is "floating" on top of the input voltage. This puts the collector of the turned-off transistor at twice the input voltage with respect to ground. 41 TIMING DIAGRAM FOR PUSH-PULL CONVERTER 42 Figure shows a timing diagram which details the relationship of the input and output pulses. It is important to note that frequency of the secondary side voltage pulses is twice the frequency of operation of the PWM controller driving the two Transistor. The DC output voltage is given by the equation:- The peak amplitude of the secondary pulses (Vpk) is given by:- 43 Advantage & Disadvantage very high utilization of the available input voltage. It can also generate multiple output voltages (by adding more secondary windings), some of which may be negative in polarity. This allows a power supply operated from a single battery to provide all of the voltages necessary for system operation. A disadvantage of Push-Pull converters is that they require very good matching of the switch transistors to prevent unequal on times, since this will result in saturation of the transformer core (and failure of the converter). 44 45