Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
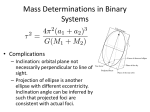
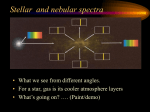
The Detection and Properties of Planetary Systems Prof. Dr. Artie Hatzes Artie Hatzes Tel:036427-863-51 Email: [email protected] www.tls-tautenburg.de→Lehre→Vorlesungen→Jena The Detection and Properties of Planetary Systems: Wed. 14-16 h Hörsaal 2, Physik, Helmholz 5 Prof. Dr. Artie Hatzes The Formation and Evolution of Planetary Systems: Thurs. 14-16 h Hörsaal 2, Physik, Helmholz 5 Prof. Dr. Alexander Krivov Detection and Properties of Planetary Systems 14. AprilIntroduction/The Doppler Method 21. AprilThe Doppler Method/Results from Doppler Surveys I 28. AprilResults from Doppler Surveys II 05. May Transit Search Techniques: (Ground ) 06. May Transit Search Techniques (Space: CoRoT and Kepler) 12. May Characterization: Internal Structure 19. May Characterization: Atmospheres 26. May Exoplanets in Different Environments (Eike Guenther) 02 June The Rossiter McClaughlin Effect and “Doppler Imaging” of Planets 09. June Astrometric Detections 16. June Direct Imaging 23. June Microlensing 30. June Habitable Planets 07. July Planets off the Main Sequence Literature Planet Quest, Ken Croswell (popular) Extrasolar Planets, Stuart Clark (popular) Extasolar Planets, eds. P. Cassen. T. Guillot, A. Quirrenbach (advanced) Planetary Systems: Formation, Evolution, and Detection, F. Burke, J. Rahe, and E. Roettger (eds) (1992: Pre-51 Peg) Resources: The Nebraska Astronomy Applet Project (NAAP) http://astro.unl.edu/naap/ This is the coolest astronomical website for learning basic astronomy that you will find. In it you can find: 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. Solar System Models Basic Coordinates and Seasons The Rotating Sky Motions of the Sun Planetary Orbit Simulator Lunar Phase Simulator Blackbody Curves & UBV Filters Hydrogen Energy Levels Hertzsprung-Russel Diagram Eclipsing Binary Stars Atmospheric Retention Extrasolar Planets Variable Star Photometry The Nebraska Astronomy Applet Project (NAAP) On the Exoplanet page you can find: 1. 2. 3. Descriptions of the Doppler effect Center of mass Detection And two nice simulators where you can interactively change parameters: 1. Radial Velocity simulator (can even add data with noise) 2. Transit simulator (even includes some real transiting planet data) And where is Nebraska? Resources: The Extrasolar Planets Encyclopaedia http://exoplanet.eu/ • In 7 languages • Grouped according to technique • Can download data, make plots, correlation plots, etc. This Week: 1. Brief Introduction to Exoplanets 2. The Doppler Method: Technique Extrasolar Planets Why Search for Extrasolar Planets? • How do planetary systems form? • Is this a common or an infrequent event? • How unique are the properties of our own solar system? • Are these qualities important for life to form? Up until now we have had only one laboratory to test planet formation theories. We need more! The Concept of Extrasolar Planets Democritus (460-370 B.C.): "There are innumerable worlds which differ in size. In some worlds there is no sun and moon, in others they are larger than in our world, and in others more numerous. They are destroyed by colliding with each other. There are some worlds without any living creatures, plants, or moisture." Giordano Bruno (1548-1600) Believed that the Universe was infinite and that other worlds exists. He was burned at the stake for his beliefs. What kinds of explanetary systems do we expect to find? The standard model of the formation of the sun is that it collapses under gravity from a proto-cloud Because of rotation it collapses into a disk. Jets and other mechanisms provide a means to remove angular momentum The net result is you have a protoplanetary disk out of which planets form. Expectations of Exoplanetary Systems from our Solar System • Solar proto-planetary disk was viscous. Any eccentric orbits would rapidly be damped out – Exoplanets should be in circular orbits – Orbital axes should be aligned and prograde • Giant planets need a lot of solid core to build up sufficient mass to accrete an envelope. This core should form beyond a so-called ice line at 3-5 AU – Giant Planets should be found at distances > 3 AU • Our solar system is dominated by Jupiter – Exoplanetary systems should have one Jovian planet • Only Terrestrial planets are found in inner regions So how do we define an extrasolar Planet? We can simply use mass: Star: Has sufficient mass to fuse hydrogen to helium. M > 80 MJupiter Brown Dwarf: Insufficient mass to ignite hydrogen, but can undergo a period of Deuterium burning. 13 MJupiter < M < 80 MJupiter Planet: Formation mechanism unknown, but insufficient mass to ignite hydrogen or deuterium. M < 13 MJupiter IAU Working Definition of Exoplanet 1. 2. 3. Objects with true masses below the limiting mass for thermonuclear fusion of deuterium (currently calculated to be 13 Jupiter masses for objects of solar metallicity) that orbit stars or stellar remnants are "planets" (no matter how they formed). The minimum mass/size required for an extrasolar object to be considered a planet should be the same as that used in our Solar System. Substellar objects with true masses above the limiting mass for thermonuclear fusion of deuterium are "brown dwarfs", no matter how they formed nor where they are located. Free-floating objects in young star clusters with masses below the limiting mass for thermonuclear fusion of deuterium are not "planets", but are "sub-brown dwarfs" (or whatever name is most appropriate). In other words „A non-fusor in orbit around a fusor“ How to search for Exoplanets 1. Radial Velocity 2. Astrometry 3. Transits 4. Microlensing 5. Imaging 6. Timing Variations Radial velocity measurements using the Doppler Wobble radialvelocitydemo.htm 8 Radial Velocity measurements Requirements: • Accuracy of better than 10 m/s • Stability for at least 10 Years Jupiter: 12 m/s, 11 years Saturn: 3 m/s, 30 years Astrometric Measurements of Spatial Wobble Center of mass q= m M a D 2q 2q = 8 mas at a Cen 2q = 1 mas at 10 pcs Current limits: 1-2 mas (ground) 0.1 mas (HST) • Since D ~ 1/D can only look at nearby stars Jupiter only 1 milliarc-seconds for a Star at 10 parsecs Microlensing Direct Imaging: This is hard! 1.000.000.000 times fainter planet 4 Arcseconds Separation = width of your hair at arms length For large orbital radii it is easier Transit Searches: Techniques Timing Variations If you have a stable clock on the star (e.g. pulsations, pulsar) as the star moves around the barycenter the time of „maximum“ as observed from the earth will vary due to the light travel time from the changing distance to the earth The Pulsar Planets were discovered in this way The Discovery Space Radial Velocity Detection of Planets: I. Techniques 1. Keplerian Orbits 2. Spectrographs/Doppler shifts 3. Precise Radial Velocity measurements Newton‘s form of Kepler‘s Law V mp ms ap as P2 = 4p2 (as + ap)3 G(ms + mp) 4p2 (as + ap)3 G(ms + mp) P2 = Approximations: ap » as ms » mp P2 ≈ 4p2 ap3 Gms Circular orbits: 2pas V= P ms × as = mp × ap Conservation of momentum: mp ap as = ms Solve Kepler‘s law for ap: 1/3 2Gm P s) ap = ( 2 4p … and insert in expression for as and then V for circular orbits V= 2p mp P2/3 G1/3ms1/3 P(4p2)1/3 0.0075 mp V = 1/3 2/3 P ms = 28.4 mp P1/3ms2/3 mp in Jupiter masses ms in solar masses P in years V in m/s Vobs = 28.4 mp sin i P1/3ms2/3 Radial Velocity Amplitude of Planets in the Solar System Planet Mercury Venus Earth Mars Jupiter Saturn Uranus Neptune Pluto Mass (MJ) 1.74 × 10–4 2.56 × 10–3 3.15 × 10–3 3.38 × 10–4 1.0 0.299 0.046 0.054 1.74 × 10–4 V(m s–1) 0.008 0.086 0.089 0.008 12.4 2.75 0.297 0.281 3×10–5 Radial Velocity Amplitude of Planets at Different a Elliptical Orbits O eccentricity = OF1/a Not important for radial velocities W: angle between Vernal equinox and angle of ascending node direction (orientation of orbit in sky) i: orbital inclination (unknown and cannot be determined Important for radial velocities P: period of orbit w: orientation of periastron e: eccentricity M or T: Epoch K: velocity amplitude Radial velocity shape as a function of eccentricity: Radial velocity shape as a function of w, e = 0.7 : Eccentric orbit can sometimes escape detection: With poor sampling this star would be considered constant Eccentricities of bodies in the Solar System Important for orbital solutions: The Mass Function f(m) = i)3 (mp sin (mp + ms)2 P K3(1–e2)3/2 = P = period K = Amplitude mp = mass of planet (companion) ms = mass of star e = eccentricity 2pG i Because you measure the radial component of the velocity you cannot be sure you are detecting a low mass object viewed almost in the orbital plane, or a high mass object viewed perpendicular to the orbital plane We only measure MPlanet x sin i The orbital inclination We only measure m sin i, a lower limit to the mass. What is the average inclination? i P(i) di = 2p sin i di The probability that a given axial orientation is proportional to the fraction of a celestrial sphere the axis can point to while maintaining the same inclination The orbital inclination P(i) di = 2p sin i di Mean inclination: <sin i> = p ∫0 P(i) sin i di ∫0 P(i) di p = p/4 = 0.79 Mean inclination is 52 degrees and you measure 80% of the true mass The orbital inclination P(i) di = 2p sin i di But for the mass function sin3i is what is important : p <sin3 i> = ∫0 P(i) sin 3 i di ∫0 P(i) di p = 3p/16 = 0.59 p = 0.5 ∫ sin 4 i di 0 The orbital inclination P(i) di = 2p sin i di Probability i < q : P(i<q) = q 2 ∫0 P(i) di p ∫0 P(i) di q < 10 deg : P= 0.03 = (1 – cos q ) (sin i = 0.17) Measurement of Doppler Shifts In the non-relativistic case: l – l0 l0 = We measure Dv by measuring Dl Dv c The Radial Velocity Measurement Error with Time How did we accomplish this? The Answer: 1. Electronic Detectors (CCDs) 2. Large wavelength Coverage Spectrographs 3. Simultanous Wavelength Calibration (minimize instrumental effects) Instrumentation for Doppler Measurements High Resolution Spectrographs with Large Wavelength Coverage Echelle Spectrographs camera detector corrector Cross disperser From telescope slit collimator 5000 A n = –2 4000 A 5000 A 4000 A 4000 A 5000 A n = –1 Most of light is in n=0 n=1 4000 A n=2 5000 A dl Free Spectral Range Dl = l/m m-2 m-1 m m+2 m+3 y Dy ∞ l2 Grating cross-dispersed echelle spectrographs y x On a detector we only measure x- and y- positions, there is no information about wavelength. For this we need a calibration source CCD detectors only give you x- and y- position. A doppler shift of spectral lines will appear as Dx Dx → Dl → Dv How large is Dx ? Spectral Resolution ← 2 detector pixels dl Consider two monochromatic beams They will just be resolved when they have a wavelength separation of dl Resolving power: l1 l2 l R= dl dl = full width of half maximum of calibration lamp emission lines R = 50.000 → Dl = 0.11 Angstroms → 0.055 Angstroms / pixel (2 pixel sampling) @ 5500 Ang. 1 pixel typically 15 mm v = Dl c l 1 pixel = 0.055 Ang → 0.055 x (3•108 m/s)/5500 Ang → = 3000 m/s per pixel Dv = 10 m/s = 1/300 pixel = 0.05 mm = 5 x 10–6 cm Dv = 1 m/s = 1/1000 pixel → 5 x 10–7 cm For Dv = 20 m/s R Ang/pixel Velocity per pixel (m/s) Dpixel Shift in mm 500 000 0.005 300 0.06 0.001 200 000 0.125 750 0.027 4×10–4 100 000 0.025 1500 0.0133 2×10–4 50 000 0.050 3000 0.0067 10–4 25 000 0.10 6000 0.033 5×10–5 10 000 0.25 15000 0.00133 2×10–5 5 000 0.5 30000 6.6×10–4 10–5 1 000 2.5 150000 1.3×10–4 2×10–6 So, one should use high resolution spectrographs….up to a point How does the RV precision depend on the properties of your spectrograph? Wavelength coverage: • Each spectral line gives a measurement of the Doppler shift • The more lines, the more accurate the measurement: sNlines = s1line/√Nlines → Need broad wavelength coverage Wavelength coverage is inversely proportional to R: Low resolution Dl detector High resolution Dl Noise: s I I = detected photons Signal to noise ratio S/N = I/s For photon statistics: s = √I → S/N = √I Exposure factor 1 4 16 36 Price: S/N t2exposure 144 400 s (S/N)–1 How does the radial velocity precision depend on all parameters? s (m/s) = Constant × (S/N)–1 R–3/2 (Dl)–1/2 s: error R: spectral resolving power S/N: signal to noise ratio Dl : wavelength coverage of spectrograph in Angstroms For R=110.000, S/N=150, Dl=2000 Å, s = 2 m/s C ≈ 2.4 × 1011 The Radial Velocity precision depends not only on the properties of the spectrograph but also on the properties of the star. Good RV precision → cool stars of spectral type later than F6 Poor RV precision → cool stars of spectral type earlier than F6 Why? A7 star K0 star Early-type stars have few spectral lines (high effective temperatures) and high rotation rates. Including dependence on stellar parameters s (m/s) ≈ Constant ×(S/N)–1 R–3/2 (Dl)–1/2 ( v sin i f(Teff) ) 2 v sin i : projected rotational velocity of star in km/s f(Teff) = factor taking into account line density f(Teff) ≈ 1 for solar type star f(Teff) ≈ 3 for A-type star f(Teff) ≈ 0.5 for M-type star Eliminate Instrumental Shifts Recall that on a spectrograph we only measure a Doppler shift in Dx (pixels). This has to be converted into a wavelength to get the radial velocity shift. Instrumental shifts (shifts of the detector and/or optics) can introduce „Doppler shifts“ larger than the ones due to the stellar motion z.B. for TLS spectrograph with R=67.000 our best RV precision is 1.8 m/s → 1.2 x 10–6 cm Traditional method: Observe your star→ Then your calibration source→ Problem: these are not taken at the same time… ... Short term shifts of the spectrograph can limit precision to several hunrdreds of m/s Solution 1: Observe your calibration source (Th-Ar) simultaneously to your data: Stellar spectrum Thorium-Argon calibration Spectrographs: CORALIE, ELODIE, HARPS Advantages of simultaneous Th-Ar calibration: • Large wavelength coverage (2000 – 3000 Å) • Computationally simple: cross correlation Disadvantages of simultaneous Th-Ar calibration: • Th-Ar are active devices (need to apply a voltage) • Lamps change with time • Th-Ar calibration not on the same region of the detector as the stellar spectrum • Some contamination that is difficult to model • Cannot model the instrumental profile, therefore you have to stablize the spectrograph RVs calculated with the Cross Correlation Function 1. Take your spectrum, f(l) : 2. Take a digital mask of line locations, g(l) : RVs calculated with the Cross Correlation Function 3. Compute Cross Correlation Function (related to the convolution) 4. Location of Peak in CCF is the radial velocity: l One Problem: Th-Ar lamps change with time! HARPS Solution 2: Absorption cell a) Griffin and Griffin: Use the Earth‘s atmosphere: O2 6300 Angstroms Example: The companion to HD 114762 using the telluric method. Best precision is 15–30 m/s Filled circles are data taken at McDonald Observatory using the telluric lines at 6300 Ang. Limitations of the telluric technique: • Limited wavelength range (≈ 10s Angstroms) • Pressure, temperature variations in the Earth‘s atmosphere • Winds • Line depths of telluric lines vary with air mass • Cannot observe a star without telluric lines which is needed in the reduction process. b) Use a „controlled“ absorption cell Absorption lines of star + cell Absorption lines of the star Absorption lines of cell Campbell & Walker: Hydrogen Fluoride cell: Demonstrated radial velocity precision of 13 m s–1 in 1980! Drawbacks: • Limited wavelength range (≈ 100 Ang.) • Temperature stablized at 100 C • Long path length (1m) • Has to be refilled after every observing run • Dangerous A better idea: Iodine cell (first proposed by Beckers in 1979 for solar studies) Spectrum of iodine Advantages over HF: • 1000 Angstroms of coverage • Stablized at 50–75 C • Short path length (≈ 10 cm) • Can model instrumental profile • Cell is always sealed and used for >10 years • If cell breaks you will not die! Spectrum of star through Iodine cell: The iodine cell used at the CES spectrograph at La Silla Modelling the Instrumental Profile: The Advantage of Iodine What is an instrumental profile (IP): Consider a monochromatic beam of light (delta function) Perfect spectrograph Modelling the Instrumental Profile (IP) We do not live in a perfect world: A real spectrograph IP is usually a Gaussian that has a width of 2 detector pixels The IP is a „smoothing“ or „blurring“ function caused by your instrument Convolution f(u)f(x–u)du = f * f f(x): f(x): Convolution f(x-u) a2 a1 a3 g(x) a3 a2 a1 Convolution is a smoothing function. In our case f(x) is the stellar spectrum and f(x) is our instrumental profile. The IP is not so much the problem as changes in the IP No problem with this IP Or this IP Unless it turns into this Shift of centroid will appear as a velocity shift Use a high resolution spectrum of iodine to model IP Iodine observed with RV instrument Iodine Observed with a Fourier Transform Spectrometer Observed I2 FTS spectrum rebinned to sampling of RV instrument FTS spectrum convolved with calculated IP Gaussians contributing to IP Model IP IP = Sgi Sampling in Data space Sampling in IP space = 5×Data space sampling Instrumental Profile Changes in ESO‘s CES spectrograph 2 March 1994 14 Jan 1995 Instrumental Profile Changes in ESO‘s CES spectrograph over 5 years: Mathematically you solve this equation: Iobs(l) = k[TI2(l)Is(l + Dl)]*PSF Where: Iobs(l) : observed spectrum TI2 : iodine transmission function k: normalizing factor Is(l): Deconvolved stellar spectrum without iodine and with PSF removed PSF: Instrumental Point Spread Function Problem: PSF varies across the detector. Solve this equation iteratively Modeling the Instrumental Profile In each chunk: • Remove continuum slope in data : 2 parameters • Calculate dispersion (Å/pixel): 3 parameters (2 order polynomial: a0, a1, a2) • Calculate IP with 5 Gaussians: 9 parameters: 5 widths, 4 amplitudes (position and widths of satellite Gaussians fixed) • Calculate Radial Velocity: 1 parameters • Combine with high resolution iodine spectrum and stellar spectrum without iodine • Iterate until model spectrum fits the observed spectrum Sample fit to an observed chunk of data Sample IP from one order of a spectrum taken at TLS WITH TREATMENT OF IP-ASYMMETRIES Additional information on RV modeling: Valenti, Butler, and Marcy, 1995, PASP, 107, 966, „Determining Spectrometer Instrumental Profiles Using FTS Reference Spectra“ Butler, R. P.; Marcy, G. W.; Williams, E.; McCarthy, C.; Dosanjh, P.; Vogt, S. S., 1996, PASP, 108, 500, „Attaining Doppler Precision of 3 m/s“ Endl, Kürster, Els, 2000, Astronomy and Astrophysics, “The planet search program at the ESO Coudé Echelle spectrometer. I. Data modeling technique and radial velocity precision tests“ Barycentric Correction Earth’s orbital motion can contribute ± 30 km/s (maximum) Earth’s rotation can contribute ± 460 m/s (maximum) Needed for Correct Barycentric Corrections: • Accurate coordinates of observatory • Distance of observatory to Earth‘s center (altitude) • Accurate position of stars, including proper motion: a, d a′, d′ Worst case Scenario: Barnard‘s star Most programs use the JPL Ephemeris which provides barycentric corrections to a few cm/s For highest precision an exposure meter is required No clouds Photons from star time Clouds Mid-point of exposure Photons from star Centroid of intensity w/clouds time Differential Earth Velocity: Causes „smearing“ of spectral lines Keep exposure times < 20-30 min