Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
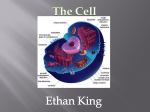
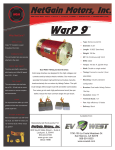
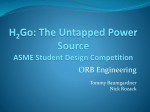
IJSART - volume 1 Issue 3 –MARCH 2015 ISSN [ONLINE]: 2395-1052 Design and Development of Remote control Surveillance Vehicle Using Beaglebone Black Board Tina M. Patil1, Kajal J. Jadhav2, S. V. Kulkarni3. Department of Instrumentation and Control Engineering 1, 2, 3 AISSMS IOIT Pune, India Abstract- Surveillance vehicle are designed and to gather and to analyze in real time multi source audio visual intelligence from the field and communicate to command station: surveillance, transmitting data from the field. The paper outlines the various stages of operation involved in the designing of a remote surveillance vehicle. The initial phase of the paper focuses on designing of the vehicle. The vehicle contains a Beaglebone Black Board for motor control and wireless communications, and a camera to capture images of its environment. While designing the vehicle the environmental conditions are taken into considerations. Focusing on the navigation of the vehicle remotely through Beaglebone Black Board and continuous video streaming by using LABVIEW. disabling vehicles. There are three types of surveillance vehicle: Keywords: Beaglebone Black, LABVIEW An UAV is a powered, aerial vehicle that does not carry a human operator, uses aerodynamic forces to provide vehicle lift, can fly autonomously or be piloted remotely, can be expendable or recoverable, and can carry a lethal or nonlethal payload. Unmanned aircraft are especially useful in penetrating areas that may be too dangerous for manned aircraft. I. INTRODUCTION Surveillance vehicles can be used for many applications where it may be inconvenient dangerous or impossible to have a human operator present. The remote operated vehicle is a vehicle that is controlled by a human operator via interface. All actions are determined by the operator based upon either direct visual observation or remote use of sensors such as digital video cameras. The vehicle is designed for functionally, comfort and safety- the exterior of the vehicle is equipped with camera observation, sensor and wireless communication system as well as a work station for operators creating a work environment suitable for complex intelligence missions. The vehicles can be designed for Military applications for recognition,Environmental observation, maritime surveillance and mine removal activities. Surveillance vehicle is mostly used for the spying purpose. II. REVIEW OF EXISTING VEHICLE There are a wide variety of surveillance vehicle in use today. Predominantly these vehicle are used to replace humans in hazardous situations. Examples are explosives and bomb Page | 23 1. Unmanned ground vehicle 2. Unmanned aerial vehicle 3. Amphibious vehicle Unmanned ground vehicle operates on ground without any human presence. There are two classes of unmanned ground vehicles: Remote-Operated and Autonomous. A remoteoperated UGV is a vehicle that is controlled by a human operator while An autonomous UGV is essentially an autonomous robot that operates without the need for a human controller. In an unmanned aerial vehicle the flight is controlled either autonomously by on board computers or by the remote control of a piolet on the ground or in another vehicle. Amphibious vehicle is a vehicle that is capable of operation on a both land and water. Most land vehicles can be made amphibious simply by providing them with a waterproof hull and perhaps a propeller. This is possible as a vehicle's displacement is usually greater than its weight, and thus it will float. III. TYPE OF VEHICLE The vehicle is remotely operated ground vehicle which can also climb stair case. The purpose of this ground surveillance vehicle is to survey the dangerous area for human beings such as borders, natural calamities. The previous surveillance vehicle is bulky in size therefore it occupied large space. Since, it is larger in size, spying in small area is not possible. Due to heavy weight the mine detection becomes difficult. The cost of this vehicle is high because of large size and heavy www.ijsart.com IJSART - volume 1 Issue 3 –MARCH 2015 ISSN [ONLINE]: 2395-1052 weight. The previous vehicle produces noise so that spying purpose is difficult to fulfill. IV. SYSTEM ARCHITECTURE Fig 2 Fig 1 Basically, system is divided into two parts that is work station and command station. Work station is referred to the vehicle and the command station is referred to the base station. GUI (Graphical User Interface) of LABVIEW is used to visualize the parameter which is indicated by the vehicle. The system is connected to the base station using Wi-Fi network cards. The base station and vehicle have their individual access point through which they are communicating with each other. The access point on the vehicle is interfaced to Beaglebone Black. Remote control is used to control the vehicle from base station. The Beaglebone black board is used as a work PC on the vehicle. The board is capable to store the information during surveillance and it provides the necessary commands to the vehicle which is given by the operator from base station by using communication network. Driving circuit is used to execute driving command which is come from command station. The camera makes vision for navigation and it gives information where vehicle is travelling. The metal detector is mount on the vehicle which detects the metal from the surrounding area where vehicle is travelling. V. The track is used on each side. The purpose of a track is to support the wheels so that vehicle can travel smoothly. Two metal pulleys are attached on front side of the chassis by using two connecting metal strips. The pulleys are attached to the front side of the vehicle at fixed angle. These pulleys help the vehicle to uplift the chassis when vehicle climb the stairs. Supply required to vehicle is given by a small battery of 7.2amp. Size of battery is less so that vehicle can carry it easily. VI. BEAGLEBONE BLACK BOARD The Beagle Bone Black is the newest member of the BeagleBoard family. It is a lower-cost, high-expansion focused BeagleBoard. It is similar to the Beaglebone But with some features removed and some features added. It has been equipped with a minimum set of features to allow the user to experience the power of the processor. It also offers access to many of the interfaces and allows for the use of add-on boards called capes, to add many different combinations of features. A user may also develop their own board or add their own circuitry. DESIGN VEHICLE The vehicle is equipped with the six wheels, each side has a three wheels. The wheels are arranged such a that the distance between two adjacent wheel is minimum. If the distance between two wheels is more then the vehicle gets stuck between two steps. Fig 3 Page | 24 www.ijsart.com IJSART - volume 1 Issue 3 –MARCH 2015 ISSN [ONLINE]: 2395-1052 The basic block diagram of the Beaglebone black board is shown in below: C. Power Sources: The board can be powered from four Different sources: • A 5VDC 1A power supply plugged into the DC connector. • A power supply with a USB connector. • Expansion connectors • The USB cable is shipped with each board. D. Reset Button: When pressed and released, causes a reset of the board. The reset button used on the BeagleBone Black is a little larger than the one used on the original BeagleBone. It has also been moved out to the edge of the board so that it is more accessible. E. Power Button: A power button is provided near the reset button close to the Ethernet connector. This button takes advantage of the input to the PMIC for power down features. While a lot of capes have a button, it was decided to add this feature to the board to ensure everyone had access to some new features. F. Fig 4 A. Processor: The revision B board has moved to the Sitara AM3358BZCZ100 device. B. Memory: There are three memory devices found on the board. i. 512MB DDR3L : A single 256Mb x16 (512MB) memory device is used. DDR3L 4Gb ii. 4KB EEPROM : A single 4KB EEPROM is provided on I2C0 that holds the board information. This information includes board name, serial number, and revision information. iii. 4GB Embedded MMC: A single 4GB embedded MMC (eMMC) device is on the board. The device connects to the MMC1 port of the processor, allowing for 8bit wide access. Default boot mode for the board will be MMC1 with an option to change it to MMC0, the SD card slot, for booting from the SD card as a result of removing and reapplying the power to the board. Simply pressing the reset button will not change the boot mode. MMC0 cannot be used in 8Bit mode because the lower data pins are located on the pins used by the Ethernet port. Page | 25 HDMI Interface: A single HDMI interface is connected to the 16 bit LCD interface on the processor. The 16b interface was used to preserve as many expansion pins as possible to allow for use by the user. The NXP TDA19988BHN is used to convert the LCD interface to HDMI and convert the audio as well. The signals are still connected to the expansion headers to enable the use of LCD expansion boards or access to other functions on the board as needed. G. Beaglebone Black Compatibility: Beagle Bone Black ships with the Debi an GNU/Linux™ in onboard FLASH to start evaluation and development. Many other Linux distributions and operating systems are also supported on Beagle Bone Black including: Ubuntu Android Fedora VII. MOTOR CONTROL USING PWM Pulse Width Modulation (PWM), is a technique used to encode a message into a pulsing signal. It is a type of modulation. Although this modulation technique can be used to encode information for transmission, its main use is to www.ijsart.com IJSART - volume 1 Issue 3 –MARCH 2015 ISSN [ONLINE]: 2395-1052 allow the control of the power supplied to electrical devices, especially to inertial loads such as motors. We control the flow of current through the motor. Well many people attempt to control the speed of a DC motor using a large variable resistor (Rheostat) in series with the motor as shown. The main advantage of PWM is that power loss in the switching devices is very low. When a switch is off there is practically no current, and when it is on and power is being transferred to the load, there is almost no voltage drop across the switch. Power loss, being the product of voltage and current, is thus in both cases close to zero. PWM also works well with digital controls, which, because of their on/off nature, can easily set the needed duty cycle. VIII. Fig 5 It generates a lot of heat and wasted power in the resistance. One simple and easy way to control the speed of a motor is to regulate the amount of voltage across its terminals and this can be achieved using PWM. As its name suggests, pulse width modulation speed control works by driving the motor with a series of “ON-OFF” pulses and varying the duty cycle, the fraction of time that the output voltage is “ON” compared to when it is “OFF”, of the pulses while keeping the frequency constant. The power applied to the motor can be controlled by varying the width of these applied pulses and thereby varying the average DC voltage applied to the motors terminals. By changing or modulating the timing of these pulses the speed of the motor can be controlled, ie, the longer the pulse is “ON”, the faster the motor will rotate and likewise, the shorter the pulse is “ON” the slower the motor will rotate. In other words, the wider the pulse width, the more average voltage applied to the motor terminals, the stronger the magnetic flux inside the armature windings and the faster the motor will rotate and this is shown below. Pulse Width Modulation Waveform: Page | 26 WI-FI FOR COMMUNICATION Wi-Fi is a local area wireless technology that allows an electronic device to participate in computer networking. Wi-Fi technology may be used to provide Internet access to devices that are within the range of a wireless network that is connected to the Internet. The coverage of one or more interconnected access points can extend from an area as small as a few rooms to as large as many square kilometers. There are two access points which are used for point to point communication. One is placed on the vehicle while other is at base station. They are used for point to point communication between vehicle and base station. a point-topoint connection refers to a communications connection between two nodes or endpoints. A traditional point-to-point data link is a communications medium with exactly two endpoints and no data or packet formatting. The host computers at either end had to take full responsibility for formatting the data transmitted between them. The connection between the computer and the communications medium was generally implemented through an RS-232 interface, or something similar. IX. IP CAMERA An Internet protocol camera, or IP camera, is a type of digital video camera commonly employed for surveillance, and which, unlike analog closed circuit television (CCTV) cameras, can send and receive data via a computer network and the Internet. Although most cameras that do this are webcams, the term "IP camera" or "nectar" is usually applied only to those used for surveillance. www.ijsart.com IJSART - volume 1 Issue 3 –MARCH 2015 ISSN [ONLINE]: 2395-1052 We directly capture the video from the camera via RTSP Pull Streaming.Once the initial request was made, the server captures the stream and maintains the RTSP Pull for as long as a client is viewing the streamThe second client that views the stream should see the video immediately, as the servers connection to the camera has already been started by the first client viewer. The stream is embedded onto your web site with custom Watermark logo overlay’s available.Features include Wait in line queuing and camera control. X. CONCLUSION By using these components, we can design good, efficient, and low cost surveillance vehicle that can be used in spying operation in all terrain dangerous area. Fig 6 • Advantages: a) Two-way audio via a single network cable allows users to communicate with what they are seeing b) Flexibility: IP cameras can be moved around anywhere on a network . c) Distributed intelligence: with IP cameras, video analytics can be placed in the camera itself allowing ability in analytics solutions. d) Remote accessibility: live video from selected cameras can be viewed from any computer, anywhere, and also from many mobile smartphones and other devices. Remote accessibility also prevents police officers from confiscating video and audio evidence that you can use against them e) IP cameras are able to function on a wireless network. f) Remote administration from any location. g) Digital zoom. h) The ability to easily send images and video anywhere with an Internet connection. i) Progressive scanning, which enables better quality images extracted from the video, especially for moving targets. j) Adjustable frame rates and resolution to meet specific needs. k) Two-way communication. l) The ability to send alerts if suspicious activity is detected. m) Lower cabling requirements. n) Support for intelligent video. Page | 27 XI. ACKNOWLEDGMENT I am grateful to Prof. S. V. Kulkarni and I acknowledge with gratitude to my supervisor Prof. S. V. Kulkarni, Department of Instrumentation Engineering, and all staff for this innovative thinking, continuous guidance, genius role and encouragement throughout the whole project period. REFERRANCES [1] M Naga Raju,” Battery Operated Wireless Video Surveillance System” Department of Electrical Communication Engineering Indian Institute of Science, Bangalore June2013. [2] Weiming Hu, Tieniu Tan, Fellow, IEEE, Liang Wang, and Steve Maybank,” A Survey on Visual Surveillance of Object Motion and Behaviors”,IEEE Transaction on systems, man, and cybernetics—part c: application and review, vol. 34, no. 3, august2004 [3] B. L. Theraja, A.K. Theraja, “Electrical Technology”, S. Chand,2006 [4] Saeed B. Niku, “Introduction To Robotics: Analysis, Control and Application”, 2nd edition. [5] Chattopadhyay Santanu, “Embedded System Design”,2nd edition Video streaming in IP camera: www.ijsart.com