Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
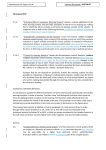
MODULE 4–SKID CONTROL SYSTEMS Topic A. System Overview And Operation Vehicle In Control Begin Skid Skid Control System Engages Back Under Control Back Tires Front Tires A-2 This vehicle has exceeded the limits of traction available to one side. A skid happens when a vehicle exceeds the traction limits of the vehicle’s tires to the road surface. To determine what is happening during a skid, sensors provide input to the ECM. The steering angle sensor provides the ECM with the drivers intended path, or direction. The wheel speed sensors provide information on individual wheel speed which the ECM is able to use for many different calculations. The yaw rate sensor tells the ECM the vehicles’ actual rate of turn. Lateral accelerometers measure the cornering force. A brake pressure sensor measures the amount of pressure the driver is applying to the brakes. The ECM is programmed to look for a vehicle’s correct path when steering through a corner. If the information being sent to the ECM does not match this programmed data, the computer determines that the vehicle is in a skid. A-3 The front tires have lost traction. Skids can be divided into two categories, understeer, and oversteer. Understeer occurs when a driver attempts to turn and the front tires begin to slip. The front wheels are turned but the vehicle does not respond and continues on its original course. On front-wheel drive vehicles this may be caused by the drive wheels spinning too fast for the corner (too much throttle). Front wheel drive vehicles can also understeer if a corner is entered too fast and the throttle opened abruptly. When a front-wheel drive vehicle understeers, the skid control system instructs the ECM to open or close the throttle, depending on the torque applied to the drive wheels. When a rear-wheel drive vehicle understeers, the skid control system instructs the ECM to reduce the throttle before engaging the appropriate brake circuit to correct the slide. Brake pressure is then applied by the computer to one or more of the wheel circuits to correct the vehicle’s skid. Anti-Lock Brake And Traction Control Systems Program 1 v.2.2–Module 4 © 2000 Inter-Industry Conference On Auto Collision Repair 36 UNDERSTEER AND OVERSTEER Refer to screen A-5v of your Student CD-ROM for a video explaining understeer and oversteer. A-4 The rear tires have lost traction. Oversteer occurs when a vehicle is turning and the rear tires begin to slide away from the direction of the turn. This occurs most often on rear-wheel drive vehicles with slipping drive wheels. When a rear-wheel drive vehicle oversteers, the skid control system instructs the ECM to open or close the throttle depending on if the drive wheels have too much or too little torque applied for the situation. Skid control systems consider a number of variables to determine if understeer is occurring. For example, when a vehicle begins to slide, three sensors provide input to the ECM, steering angle sensor, yaw rate sensor, and lateral accelerometer. The steering angle sensor measures how far the front wheels have been turned. The yaw rate sensor measures the rate of the vehicle’s change in direction. The lateral accelerometer measures cornering force. For example, this force may be described as the force passengers feel when making a turn. When the rear tires are losing traction in a corner, the steering wheel is turned less than the vehicle is actually turning. Again the lateral accelerometer senses a reduction in cornering force. The ECM applies the outside front brake to prevent the rear of the vehicle from skidding farther out of line. Different vehicle makers use different methods of correcting a vehicles’ skid. For example, in a situation where one vehicle maker would apply the right front brake (left hand corner oversteer) another vehicle maker applies front and rear right side brakes, and still another vehicle maker applies front and rear right side brakes and left rear brake. Anti-Lock Brake And Traction Control Systems Program 1 v.2.2–Module 4 © 2000 Inter-Industry Conference On Auto Collision Repair 37 Topic B. Parts Identification And Function B-2 The steering angle sensor measures the steering angle, and on some models, the rate of turn as well. B-1 Yaw rate sensors are able to measure the effects of momentum on a vehicle. Yaw rate sensors measure a vehicle’s actual turn rate. These sensors may be located under the rear package shelf, in the center console, or under the driver’s seat. One yaw rate sensor is a tuning fork type. Voltage forces the tuning fork to vibrate. Then, any change in direction of travel of the vehicle distorts the legs of the tuning fork. The sensor creates a linear output voltage signal that tells the ECM the rate of change in direction, or yaw. YAW RATE SENSORS Select the Demonstration Icon found on screen B-1 of your Student CD-ROM for a demonstration on examples of yaw rate sensors. The steering angle sensor measures the steering wheel position relative to straight ahead. It may be self-centering or have to be calibrated after any steering (or straightening) work is performed. Some models also measure the rate (speed) that the steering wheel turns. This is accomplished using a potentiometer that measures the turning rate. Depending on the vehicle, the signal may be either unmodified, or analyzed through a microprocessor before being sent to the ECM. On BMW vehicles equipped with DSC 2 or 3 the steering sensor must be calibrated after work has been performed to the steering or suspension systems. On some GM vehicles (Corvette and Seville) the ECM runs a centering routine on the steering wheel position sensor every time the vehicle is started and driven to compensate for tire and suspension wear. STEERING ANGLE SENSORS Select the Demonstration Icon found on screen B-2 of your Student CD-ROM for a demonstration on examples of steering angle sensors. Anti-Lock Brake And Traction Control Systems Program 1 v.2.2–Module 4 © 2000 Inter-Industry Conference On Auto Collision Repair 38 LATERAL ACCELEROMETERS Select the Demonstration Icon found on screen B-3 of your Student CD-ROM for a demonstration on examples of lateral accelerometers. B-3 The lateral accelerometer sends a signal to the ECM that represents the cornering force. A lateral accelerometer is very similar to an airbag system crash sensor (decelerometer). The lateral accelerometer sends a precise reading to the ECM that represents the cornering force that the vehicle is experiencing. The ECM uses the lateral acceleration information along with the steering wheel position and wheel speed information to calculate the desired yaw (turn) rate. Lateral acceleration sensors may be located ahead of the B-pillar, on the vertical surface of the inner rocker panel (one on each side of the vehicle). The sensors can be located in the C-pillar behind the rear seat cushion, or in the engine compartment, near the master cylinder. Accelerometers are used on technologically sophisticated vehicles for measuring acceleration forces in almost every direction. These sensors are used for every system that might possibly need information on vehicle movement from airbag to suspension systems. A service manual is essential to identify the sensors. B-4 The number location and function of these warning lights will vary greatly between vehicles. There are numerous indicator and warning lamps used in skid control systems. The following is an example of one vehicle makers set of warning lamps: ■ ■ ■ ■ ■ ■ SCS ON. Displayed for a few seconds when the system is turned on. SCS. Displayed when the skid control system is activated. SCS WARMING UP. Displayed if the steering angle sensor is not centered after 30 seconds. SERVICE SCS. Displayed continuously when an SCS fault exists. SCS OFF. Displayed continuously when SCS is turned off. SCS WARM UP COMPLETE. Displayed for a few seconds after the steering angle sensor is centered. These lamps may be located in the instrument panel or the center console. Most vehicles use two lateral acceleration sensors. Anti-Lock Brake And Traction Control Systems Program 1 v.2.2–Module 4 © 2000 Inter-Industry Conference On Auto Collision Repair 39