Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
TCP congestion control wikipedia , lookup
Wake-on-LAN wikipedia , lookup
Deep packet inspection wikipedia , lookup
Recursive InterNetwork Architecture (RINA) wikipedia , lookup
Network tap wikipedia , lookup
Computer network wikipedia , lookup
Wireless security wikipedia , lookup
Piggybacking (Internet access) wikipedia , lookup
Airborne Networking wikipedia , lookup
Cracking of wireless networks wikipedia , lookup
Power over Ethernet wikipedia , lookup
IEEE 802.1aq wikipedia , lookup
List of wireless community networks by region wikipedia , lookup
International Journal of Wireless Information Networks, Vol. 9, No. 2, April 2002 (© 2002)
Personal Area Networks: Bluetooth or IEEE 802.11?
P. Johansson,1 R. Kapoor,1 M. Kazantzidis,1 and M. Gerla1
Interconnecting all our electronic devices we carry around, such as cellular phones, PDAs, and laptops, with wireless links requires a cheap, low-power radio technology that still delivers good performance. In this context, the Bluetooth wireless technology was developed to meet the requirements introduced by these personal area networks (PANs). However, today we see a widespread
deployment of wireless local area network (WLAN) radios (primarily IEEE 802.11b) also in small
devices, such as PDAs. This paper will compare the PAN capabilities of a Bluetooth-based system
with an IEEE 802.11b-based system. In order to focus the comparison on link and networking functionality, the IEEE 802.11b radio is assumed to be operating at the same power level as the Bluetooth radio (i.e., assuming a 0 dBm radio). Results are obtained by means of simulations in which
throughput and delay are measured for multihop and overlaid PANs. Estimations on power usage
are also given in the simulations. The results indicate that as the number of PANs increases, the
Bluetooth-based PANs basically maintain the same bandwidth per PAN, while the corresponding
IEEE 802.11-based PANs suffer significantly from the increased co-channel interference. However,
for cases with a few co-channel-interfering PANs (2–3 PANs hosting about 10–15 nodes), the IEEE
802.11b-based PANs offer a higher bandwidth per user than the corresponding Bluetooth PANs,
which corresponds to the difference in link bandwidth between the two systems. At high interference levels, the Bluetooth PAN offers a higher capacity than the IEEE 802.11 PAN. The latter also
shows unfairness among TCP connections in the PAN at high loads. The energy efficiency, defined
as successfully transmitted bits per energy unit, decreases sharply for IEEE 802.11 with increased
number of PANs, while Bluetooth maintains a constant level. Packet delays are also shown to be
more stable for the Bluetooth PAN than for the IEEE 802.11 PAN as the number of PANs increases.
KEY WORDS: Bluetooth; 802.11; PAN; scatternets; performance.
of network is referred to as a personal area network
(PAN). However, a PAN may, from time to time, also
include devices that are not carried along with the user,
e.g., an access point for Internet access or sensors located
in a room. Moreover, devices from other users’ PANs
may also be interconnected to enable sharing of information, which could be anything from business cards to
multiplayer game interaction. Figure 1 depicts a PAN
user who carries a laptop, a cellular phone, a PDA, and
a digital camera.
In general, the nature of PANs implies a minimum
of preconfiguration, i.e., it should be possible to establish
the network in an ad hoc fashion with minimum user intervention. In this context, Bluetooth has been tailored to
1. INTRODUCTION
Networks of small handheld electronic devices will
enable an environment where information may be accessed, exchanged, and shared seamlessly among the devices in the network. Typically, such a network could
consist of a cellular phone, a PDA, a notebook PC, a digital camera, an mp3 player, a DVD player, etc., all of
which are devices that a person carries around in everyday life both for work and pleasure [8]. Often, this kind
1
University of California, Los Angeles, Computer Science Department,
3803 Boelter Hall, Los Angeles, California 90095-1596. E-mail: {perj,
rohitk, kazantz, gerla}@cs.ucla.edu
89
1068-9605/02/0400-0089/0 © 2002 Plenum Publishing Corporation
90
Fig. 1. Handheld and mobile devices interconnected in a PAN.
provide such functionality through its inherent ad hoc
discovery and connectivity capabilities. Also, it is likely
that most PAN devices will be battery driven, which
makes efficient use of power an important issue. The
Bluetooth piconet architecture enables the controlling
master unit to apply a strict medium access control
through the use of a polling scheme. This gives a better
control over power consumption and bandwidth usage
compared to a random access scheme, since slave units
transmit only when scheduled by the master unit. Hence,
the Bluetooth wireless technology provides functions
that make it a natural choice for PAN connectivity.
However, in light of widespread use of wireless
local area network (WLAN) technology, such as IEEE
802.11, also in smaller handheld devices, it becomes interesting to compare WLAN with Bluetooth as a technology for PANs. The enhanced 11 Mbps version of the
standard, denoted IEEE 802.11b, is currently the most
widely deployed standard for WLANs, and the study will
focus on this version. Typically, the topologies of
WLANs are based on network access points (APs) that
service a number of mobile terminals (MTs)—for instance, notebook computers—within its coverage. Several APs may also be connected to a local area network
(LAN, e.g., Ethernet) and can then service a larger area
by means of a handoff of MTs between the APs on the
LAN. The IEEE 802.11 standard also specifies a peer-topeer communication mode, i.e., an ad hoc mode, which
can be used in most implementations available today.
The ad hoc mode of the IEEE 802.11 standard has for
several years been used as an experimental platform for
mobile ad hoc network (MANET) routing protocols,
since it presents a fairly easy and cheap way to create
multihop packet radio networks [2].
Furthermore, the ad hoc mode provides the possibility of creating ad hoc PANs based on the IEEE 802.11
standard, which is an application IEEE 802.11 was not
Johansson, Kapoor, Kazantzidis, and Gerla
originally designed for but is the niche at which Bluetooth is aiming. Note that though several small devices
are starting to be equipped with IEEE 802.11 interfaces,
the main usage is still to connect to an AP to get network
access and not to create ad hoc PANs. It is the suitability for the latter that will be investigated in this paper.
One key assumption made in this work is that the IEEE
802.11b radio has its transmission power set to the same
level as Bluetooth, i.e., 0 dBm, in order to give a fair
comparison (13–20 dBm is the normal maximum output
power). Since several implementations apply power control, it is feasible to assume a low-power version of the
system; e.g., the 802.11b MAC could possibly run on a
Bluetoothlike low-power radio. In this context it should
be pointed out that no such products have, to the authors’
knowledge, been publicly announced at the time of this
study.
The low price claimed for a Bluetooth single-chip
solution (which aims at $5 for high volumes), compared
to the more expensive IEEE 802.11 multichip solutions,
has been another motivation for using Bluetooth in
small, price-sensitive devices. However, the introduction
of single-chip IEEE 802.11 CMOS solutions has been
announced by several vendors, which will push down the
price for IEEE 802.11 solutions. Still, the more complex
structure of the 802.11 system is also expected to give a
more expensive solution than Bluetooth in the future.
The question is how far down the price can be pushed.
Note that a difference of even a few dollars may be decisive for the choice of wireless technology for many
low-end, high-volume, and cheap devices, which favors
Bluetooth for several high-volume markets.
The IEEE 802.11b system offers a raw link rate of
11 Mbps (about 7 Mbps maximum user data rate), while
Bluetooth offers a link rate of 1 Mbps per link (maximum of 721 kbps user data rate). A claim that has been
made in this context is that the Bluetooth piconet approach gives a better channel efficiency than the random
access method used in IEEE 802.11b, if applied in an ad
hoc network environment. Issues related to this claim
are, for instance
• At what traffic loads and node densities will the
11 Mbps channel of IEEE 802.11b deliver a lower
rate than a corresponding case using the Bluetooth 1 Mbps channels?
• How will the packet delays compare between the
two systems?
• How will the power consumption change with the
load in the two systems?
• How will the bandwidth fairness compare between the systems?
Personal Area Networks: Bluetooth or IEEE 802.11?
91
The work presented in this paper will address all
these issues in order to evaluate and make estimations of
the circumstances where one system may be preferred
over the other in an ad hoc PAN environment.
Related work in this context has, to the authors’
knowledge, not focused on comparing the suitability for
PANs. The issue of coexistence between Bluetooth and
IEEE 802.11 has been studied in [4]. Moreover, the architecture and performance of Bluetooth PANs as such
has also been analyzed in, for instance, [3].
The work presented herein is organized as follows.
In Section 2, the protocols of both Bluetooth and IEEE
802.11 are described to give a technical background for
the study. In Section 3, a discussion and a preliminary
comparison between the protocols is given in an ad hoc
PAN context. In Section 4, a simulation study of the
PAN system candidates is presented and the results are
discussed. Finally, in Section 5 conclusions are drawn
and an outline for further work is given.
in a time-division manner, i.e., the interpiconet unit will
switch between the piconets. As the unit switches between the piconets, it can act as slave in one or more but
as master in at most one piconet. The interpiconet units
may also forward traffic between the piconets, i.e., operate as gateways between piconets. Since the interpiconet
unit cannot receive information from more than one piconet at a time, the need to coordinate the presence of
masters and interpiconet devices in each piconet is necessary to achieve controlled performance.
Most of the published work on Bluetooth so far has
focused on the single piconet and issues related to scheduling of units within one piconet, e.g., [9,13]. Furthermore, a thorough study of the Bluetooth link performance for a case with several simultaneous overlaid
piconets is presented in [10]. This latter study clearly indicates the robustness of Bluetooth for dense network environments. Some work has also looked at the task of actual formation of Bluetooth piconets and scatternets, e.g.,
[11,12,14].
2. PROTOCOL DESCRIPTIONS
2.1.1. Rendezvous Point Interpiconet Scheduling
2.1. Bluetooth
The Bluetooth wireless technology [1] is a lowpower, low-cost, short-range RF technology that focuses
on replacing cables between electronic devices. It uses a
fast frequency-hopping spread spectrum (FHSS) scheme
and operates in the unlicensed Industrial ScientificMedical (ISM) band at 2.4 GHz. Furthermore, the FHSS
channel is divided into time slots of 0.625 ms each that
define a time-division duplex channel (TDD), where one
downlink slot is immediately followed by an uplink slot.
Several slots may be tied together in one direction to enable longer data packets than can a single slot. The Bluetooth network architecture is based on the piconet, a star
topology, which is defined by two or more Bluetooth
units that share the same frequency-hopping channel.
The gross data rate of the piconet channel is 1 Mbps, but
with overhead the maximum user rate becomes 721
kbps. The central unit in a piconet (the master) may control up to seven units (slaves). Any Bluetooth unit is capable of becoming the master of a piconet.
Even though pure cable replacement with point-topoint radio links is perhaps the most obvious use for
Bluetooth, the capability of forming Bluetooth networks
opens up a whole new arena for applications. In order to
further enhance the networking capabilities of Bluetooth,
piconets may be interconnected into scatternets, which
require some units to be present in two or more piconets.
However, since a Bluetooth unit is expected to host only
one radio transceiver, this presence needs to be handled
An interpiconet unit (also named gateway herein)
negotiates a rendezvous point (RP) [3] with the master of
each piconet it belongs to. An RP is essentially a point
in time where the master and the gateway will rendezvous; i.e., the master will poll the gateway and the
gateway will listen in the master’s piconet. These RPs
are repeated periodically with a time period referred to
as a superframe, which is defined in number of Bluetooth
slots. A gateway stays in a piconet from the time of its
RP with the master to its next RP with some other master. Thus, the RPs divide the time of the gateway between more than one piconet.
In the algorithm used in this study, the RPs are assigned so that they are as far from each other as possible; i.e., the distance between the RPs is maximized,
which is a very simple way to approximately divide the
time of the gateway equally between the piconets it belongs to.
Consider a master node that wants to assign a new
RP to a gateway. Suppose the gateway node belongs to i
other piconets and has RPs r1, r2, . . . , ri with these piconets. The master node itself has j other gateways to
which it has assigned RPs ri⫹1, ri⫹2, . . . , ri⫹j. Note that
these RPs repeat after every superframe. The master considers the ordered list of all the i ⫹ j RPs already established in both the master and gateway units and assigns
a new RP that maximizes the distance with the previous
ones. Thus, the RP is chosen as the middle slot of the
largest interval between successive RPs.
92
Johansson, Kapoor, Kazantzidis, and Gerla
2.2. IEEE 802.11
The IEEE 802.11 specification is a wireless LAN
standard that specifies a wireless interface between a
client and a base station or access point, as well as between wireless clients. IEEE 802.11 defines two physical
characteristics for radio-based wireless local area networks: direct-sequence spread spectrum (DSSS) and frequency-hopping spread spectrum (FHSS), both of which
operate on the 2.4 GHz ISM band. IEEE 802.11b defines
high rate extensions up to 11 Mbps (raw link rate) for the
DSSS channel and is the most commonly used standard
today. In addition, IEEE 802.11b utilizes a dynamic rateshifting functionality, allowing data rates to be automatically adjusted for noisy conditions. This means that
IEEE 802.11b devices will transmit at lower speeds—5.5
Mbps, 2 Mbps, and 1 Mbps—depending on the signalto-noise/ratio (SNR) at the receiver. When a device detects an improved SNR, the channel will automatically
speed up to the appropriate rate.
Recently, the Wireless Ethernet Compatibility Alliance (WECA [6]) adopted the IEEE 802.11b specification to define the Wireless Fidelity (WiFi) standard for
wireless LANs. WiFi enables access points and mobile
terminals to interoperate across vendors.
Two network architecture modes have been defined
in the IEEE 802.11 standard, namely, the point coordination function (PCF) mode and the distributed coordination function (DCF) mode. The former uses a centralized
approach in which a network access point controls all
traffic in the network, including local traffic between
wireless clients in the network. The DCF mode supports
peer-to-peer communication between wireless clients and
is often referred to as the ad hoc mode. The media access
control (MAC) layer uses the carrier sense multiple access with collision avoidance (CSMA/CA) algorithm. A
terminal operating in DCF mode that wants to send data
listens to make sure the channel is free and then waits for
a randomly drawn period (backoff). If no other station attempts to gain access after this period of waiting, the terminal can gain access according to one of two modes:
• Four-way handshake: The sending node sends a
request-to-send (RTS) packet to the receiving terminal. If the receiver accepts the request, it
replies with a clear-to-send (CTS) packet. If no
collisions have occurred, the sender then begins
transmitting its data.
• The sender immediately begins sending its data.
This mode is used when the data packet is short.
In either mode, the receiver responds with an acknowledgement (ACK) packet if the packet is success-
fully received. The CSMA/CA mechanism is also active
for the PCF mode. However, because the access point
has higher priority than terminals, it has total control of
the channel. The IEEE 802.11 standard does not specify
a method for multihop ad hoc networking. However,
MANET-based IP routing has been used in several experimental networks.
3. COMPARISON OF LINK AND NETWORK
LAYER PROPERTIES
Under the assumption that the two systems can use
a radio with similar performance regarding power consumption, it remains to compare the link and network
layer characteristics of the two systems. The assumption
made here with regard to power consumption is that the
transceivers use the same energy to send a packet over a
given time period, thus a higher link rate gives lower energy spent per bit. The same assumption is made for receiving a packet. In the following, the properties of the
two systems are discussed and initially compared in a
number of areas identified as vital for ad hoc PANs.
Some of these areas are further analyzed by means of
simulation.
Perhaps the most fundamental difference between
the systems is that Bluetooth is connection oriented
while IEEE 802.11 is connectionless. Note that this concerns the link layer behavior: Bluetooth is based on connections between the units (master and slave(s)) and a
connection has to be set up before any data can be sent;
for IEEE 802.11, any unit can send to any other unit directly as long as it is within range. This difference affects, to a large extent, in what situations one protocol
will perform better than the other.
3.1. Medium Access Control and Radio Channel
Management
The media access control used in Bluetooth is based
on a central controlling unit, the master, which polls the
slaves in the piconet. This enables a tight control of the
capacity in the network since no packet collisions can
occur between the nodes of the same piconet. It also enables a controlled allocation of resources via the master
that could be used to provide QoS support and efficient
power control in the piconet. The division of the spectrum into piconets, each using its own FHSS channel, is
necessary, since using an overall central controlling unit
would not scale for a case with many mobile ad hoc
nodes and a short-range radio. Instead, each piconet has
its own master and the piconets run independently of
Personal Area Networks: Bluetooth or IEEE 802.11?
93
each other. The FHSS channel-management approach
used in Bluetooth divides the spectra into narrow channels to avoid collisions between piconets (79 hopping
channels). A larger number of channels is better for
avoiding collisions but leads to a smaller capacity per
channel (smaller slices), since the overall ISM spectrum
is fixed. In addition, the higher-layer data packets are
fragmented into shorter packets so as to allow a high
hopping rate between the channels. This gives better
delay properties for the resulting data stream in the case
of collisions.
For the IEEE 802.11, the random-access-oriented
media access control (CSMA/CA) is intended to enable
a distributed control of the radio channel, i.e., no central
controlling entity. It provides flexibility, since data can
be exchanged between any pair of nodes within range.
The random access enables nodes wider channels in the
same frequency band, since no central control that all
nodes need to hear is necessary. For IEEE 802.11b, the
ISM band is divided into three nonoverlapping DSSS
channels.2 However, no mechanism to form overlaid
PANs using different channels exists today, which would
enable a better utilization of the ISM band. One way to
achieve this could be to use one of the three channels to
detect other nodes and then decide on another, perhaps
less “crowded” channel to use for the PAN traffic. This,
however, introduces a similar issue as in Bluetooth
where a node needs to switch between channels, i.e., an
interchannel switching similar to the interpiconet switching in Bluetooth scatternets. The packet length in 802.11
is a normal Ethernet packet (maximum of about 1500
bytes) but since no frequency hopping is applied to
counter interference, the packet is in general not segmented into smaller units.
tion well with a minimum of QoS functionality, e.g., a
priority scheme. The problem is that overprovisioning is
difficult to assure in an ad hoc PAN environment. Furthermore, the dynamic rate shifting in IEEE 802.11b may
also decrease the actual link rate if the number of PANs
increases. However, work to enhance IEEE 802.11 with
further QoS functionality is underway within the IEEE
802.11e working group [5].
3.1.1. Comparison
The fundamental difference in access control is one
of the factors that distinguish the traffic characteristics of
the two systems. Which system performs better depends
both on the type of traffic (and quality requirements
thereof) and the network topology. Bluetooth has a better potential to handle traffic with QoS requirements in a
topology with several overlaid (interfering) PANs than
IEEE 802.11, based on the reasoning earlier. However,
in cases when the traffic does not require QoS support or
at low traffic loads, the inherent higher bit rate of IEEE
802.11b would give a better capacity than Bluetooth. A
pure overprovisioned link may serve a real-time applica2
Up to 14 separate DSSS channels exist for 802.11b in the ISM band,
but since a 25 Mhz channel spacing is used it gives three nonoverlapping DSSS channels.
3.2. Neighbor Discovery
It is essential to discover other units both within and
outside the PAN3 in an ad hoc fashion in order to allow
a simple and user-friendly usage of the PAN devices. In
this respect, Bluetooth uses its INQUIRY and PAGE
procedures that enable interconnection without a priori
knowledge about other units within range. The connection phase may take between a few milliseconds (PAGE)
or up to several seconds (INQURY ⫹ PAGE), depending on whether the units are known to each other or not.
If the units are known to each other, i.e., the Bluetooth
MAC address (the Bluetooth Device Address,
BD_ADDR) is known, only the PAGE procedure is required to connect. This case would typically occur for
devices belonging to the same PAN, while connection to
external devices would typically require the longer
INQUIRY process.
For IEEE 802.11, any unit within radio range can be
directly addressed without setting up a connection; thus,
known devices are simply “discovered” if they are within
reach. External devices could be passively discovered by
a unit by simply listening to other units sending packets
within its coverage area. However, in this respect IEEE
802.11 has no defined way to actively discover units, i.e.,
nothing similar to the INQUIRY procedure in Bluetooth.
One feasible way to get the neighboring node addresses
would be to use a broadcast procedure, where every unit
advertises its MAC address in either a periodic fashion
or through a broadcast request to neighbors to send their
MAC addresses. This discovery function may also be
initiated from a network layer routing protocol, as for instance in the case of the Ad hoc On demand Distance
Vector (AODV) MANET routing protocol [17], where
network layer “Hello” messages, containing the IP address of the sending unit, are broadcast periodically from
all units.
3
The definition of which units belong to the PAN is kept rather loose
in this study. Typically, it is a security-based definition: Devices
“owned” by the user are in the PAN; others are “guests” in the PAN.
For the sake of this study, there is no crucial difference between the
two systems in this respect.
94
Note that if the PAN is assumed to be IP based, the
Address Resolution Protocol will be used to find the
MAC address for IP addressed units for both Bluetooth
and IEEE 802.11. In that context, knowledge about
MAC addresses of neighboring nodes prior to invoking
the address resolution procedure may enhance the address resolution for IP.
3.2.1. Comparison
Bluetooth has the advantage of a standardized way
of obtaining the MAC address of new nodes in an ad hoc
fashion by using the INQUIRY procedure. In the case of
IEEE 802.11, such an initial discovery function needs to
be added to find the MAC addresses of neighbors that are
in the vicinity. With respect to ad hoc discovery, Bluetooth has an advantage over IEEE 802.11. However,
once the MAC address of an IEEE 802.11 unit is found,
packets may be sent directly to that unit using the random access CSMA/CA protocol. A Bluetooth node
needs to page (or be paged) and set up a connection to
form a piconet before sending any packet. With respect
to flexibility in sending to already discovered neighbors, IEEE 802.11 appears to have an advantage over
Bluetooth.
3.3. Multihop PANs
When two PAN nodes cannot reach each other directly, packets need to be forwarded by one or more intermediate units. This capability extends both the range
and versatility of the PAN beyond a pure point-to-point
link for cable replacement. With the introduction of multihops, routing in the ad hoc PAN becomes an issue that
belongs to the area of mobile ad hoc network routing,
which has been dealt with in, for instance, the MANET
WG in the IETF [2]. However, MANET deals mostly
with large-scale, military-type ad hoc networks, while
the scope of the PAN will be rather limited and the routing protocol could most likely be kept relatively simple.
Multihop in a Bluetooth PAN will, in the general
case, involve scatternets, i.e., interconnected piconets,
since multihop within one piconet is limited to only two
hops: slave-master-slave. The properties of a multihop
path that goes across piconets and one that stays within
a piconet may be quite different due to the interpiconet
scheduling in the scatternet case. Each interpiconet node
on the multihop path will introduce a delay that is
strongly correlated with the switching periods of the interpiconet scheduler. The shorter the periods are, the
shorter the average delays will be, if packets are assumed
to enter the interpiconet node at any time, but instead, the
Johansson, Kapoor, Kazantzidis, and Gerla
overhead of switching piconets (frequency hop channel)
will increase. Multihops within one piconet, on the other
hand, will most likely show smaller delays, since the intrapiconet scheduler in the master node operates on the
same channel all the time. One exception to this would
be if one of the endpoints (slaves) were an interpiconet
node. In such a case, a slave may not be present when the
master tries to forward a packet from the originating
slave.
Multihop in an IEEE 802.11 network is rather
straightforward since the nodes are peers, i.e., no underlying topology of piconets and scatternets affects the
multihop path. However, since all nodes use the same
channel, each additional hop that a packet makes adds to
the aggregate traffic on that channel. Nevertheless, it has
been shown, e.g., in [7], that a decreased power level,
leading to multiple hops for a specific source-destination
pair, actually saves power and improves performance
due to the spatial reuse of the channel—the overall interference level is decreased in the same area.
3.3.1. Comparison
In cases where the distance is such that direct links
can be used between the nodes in the PAN, an IEEE
802.11-based system would tend to use these links. For
Bluetooth, even if two slave nodes could be connected
directly, the piconet topology causes the packets to go
via the master, which loads the piconet twice with the
same traffic. Direct Bluetooth links could, of course, be
set up between any two nodes, i.e., a separate piconet per
pair of nodes in the PAN. This would mean that nodes
would be taking part in many simultaneous piconets,
which implies poor performance for the interpiconet
nodes, since they need to switch between piconets. This
would only be an advantage if communication were concentrated to one link (piconet) at a time—long enough to
bring down the overhead of switching between the piconets. Thus, in the case where nodes in the PAN can be
reached directly, IEEE 802.11 may have an advantage
over Bluetooth due to its flexible, connectionless links.
Again, however, as the number of simultaneous PANs
increases, Bluetooth’s piconet channel separation protects against interference.
In cases where the distance between two nodes requires one intermediate node, the piconet architecture
with its central master unit will provide an efficient usage
of the piconet capacity. Depending on the interference
situation, IEEE 802.11 is typically less efficient in this
case but may still give a higher resulting throughput
since it operates at a higher link rate than Bluetooth.
However, if the number of simultaneous PANs is in-
Personal Area Networks: Bluetooth or IEEE 802.11?
95
creased, the simulations in this study show that the interference will cause IEEE 802.11 to share its single
channel, while Bluetooth will have an almost linear increase of aggregated bandwidth as new PANs are added
to the “room.”
Finally, in cases where several multihop paths are
required, the implications of paths over scatternets come
into play for Bluetooth. For IEEE 802.11, the multihop
ad hoc network has been shown to be sensitive to high
traffic loads due to the uncoordinated random access
scheme. The simulations indicate that for the multihop
case, the throughput is actually comparable between the
systems, but IEEE 802.11 suffers from rather low energy
efficiency.
low, where the IEEE 802.11 transceivers are assumed to
operate at a low power (approximately 0 dBm) instead of
the typical 13–20 dBm.
3.4. Power Consumption
The design of the Bluetooth system is focused on
providing means for low power consumption. The
polling approach used in the piconet gives the master
unit full control over the piconet capacity and avoids
packet collisions that waste capacity and power within
the piconet. In addition, Bluetooth offers three powersaving modes: sniff, hold, and park modes. A slave in
sniff mode does not need to be present to receive a
packet from the master at every slot in the TDD channel.
Instead, sniff slots are defined at periodic time intervals
and the slave needs to be present at those slots. The time
between the sniff slots can be used to save power in the
slave unit. The hold mode applies a similar approach but
instead of periodic intervals between the polling slots, a
new hold interval is set each time. In the park mode, the
slave node goes in to the deepest level of “hibernation”
and needs to be woken up by the master by means of a
specific unpark mechanism. When the slave is parked, it
gives up its temporary 3-bit address and cannot be polled
as a regular member of the piconet.
An IEEE 802.11 unit in ad hoc mode needs to be
able to receive a packet from any node in the ad hoc network, which means that it needs to have its receiver active for long periods of time. However, once a pair of
units has gained access to the channel, they announce the
time expected for their exchange of data. This means that
nodes that receive this information can choose to go into
sleep mode for the duration of the packet exchange.
3.4.1. Comparison
Low power consumption is probably one of the
strongest arguments in favor of Bluetooth as opposed to
IEEE 802.11 as the technology for PANs. The validity of
this argument is investigated in the simulations that fol-
4. PAN SIMULATION ANALYSIS
Based on the discussions above, the question of
which system is best suited for PANs depends to a large
extent on the assumptions regarding traffic and the network scenario. The discussions do point out some areas
where IEEE 802.11 could probably be improved to better serve a PAN, which is to be expected since it was not
designed for such an application. In order to further clarify some of the issues addressed above, a set of PAN scenarios is defined and then simulated using both Bluetooth
and IEEE 802.11 models.
4.1. Simulation Model
The simulation environment used in the experiments is NS-2 [16]. NS-2 already includes several wireless network models. In particular, it supports the IEEE
802.11b standard (MAC and physical layers), which has
been used for simulating 802.11 in our experiments. In
addition, a channel model is also part of the IEEE
802.11b simulation model. For Bluetooth, a simulation
model was added that has support for defining scatternets
and that models interference between piconets. The
model contains most of the standard features of Bluetooth, such as frequency hopping, multislot packets, and
fast ARQ (Automatic Retransmission Query).
4.1.1. Bluetooth Channel Model
An important feature of the simulator is the channel
model. Frequency hopping is modeled as a pure pseudorandom sequence. If two or more transmissions occur on
the same frequency, the SIR (Signal-to-Interference
Ratio) is evaluated using the gain factor g of each radio
channel. The factor g is considered constant during the
packet transmission, and its value is obtained by considering the following factors:
• Path loss due to distance: d⫺, where d is the distance and ranges between 2 and 4.
• Shadowing: lognormal random variable s ⫽ 100.1 ,
where is a Gaussian variable with standard
deviation.
• Fading: exponential random variable (Rayleigh
fading) with mean ⫽ 1.
96
Johansson, Kapoor, Kazantzidis, and Gerla
• At the receiver i, the SIR is evaluated as
SIR 5
Pt ?gii
Pn 1 SPt ?gji
where gij is the gain factor between transmitter j and receiver i, Pt is the transmitted power, and Pn is the noise
power in the signal bandwidth. The receiver determines
the bit error probability based on the SIR value, taking
into consideration the modulation adopted and the FEC
coding (if adopted). The Bluetooth slave polling strategy
that we have used is the one given in [9]. It tries to assign slots to slaves based on their traffic history and
activity.
The Bluetooth model supports scatternets by defining gateways according to the interpiconet scheduling
scheme described in subsection 2.1.1. In the simulation
model, however, these gateway units are always slaves;
masters do not become gateways.
4.1.2. Network Topologies
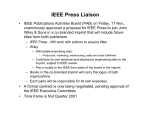
The network topologies were generated in a separate “scatternet generator” system that can form Bluetooth scatternets with a control regarding the number of
masters, slaves, and gateway (interpiconet) nodes, as
shown in Fig. 2. The results of this generation are then
fed into the actual NS Bluetooth simulator in a parameter file (a tcl script file).
The inputs given to the scatternet generator are:
# of Piconets: Number of piconets
Topology Expand Factor: Determines how close the piconets will be. Its use is explained below.
MAX # of Piconets per Gateway: Maximum number of
piconets a gateway may belong to. The value was
set to 2 for the simulations herein.
MAX # of Gateways per Piconet: Maximum number of
gateways a piconet may have. We choose the value
of this parameter as 7, which is the maximum number of slaves.
Superframe Length in Slots: The length of the superframe. The value was set to 100 slots for the simulations in this study.
The area of the topology produced is a square and
its size is determined as in Eq. (1). As shown in the equation, the Expand Factor determines how spread out the
piconets will be. The value of Range is taken to be 10 m.
terX refers to the length of the square terrain.
terX 5 2 # Piconets * ExpandFactor * 2 * Range
(1)
Once the area for the scatternet is defined, the masters
are uniformly distributed in the terrain. Each master has
a random number of slave nodes around it, distributed
randomly within the range of the master, forming a piconet. Some of the slaves may be within range of more
than one master; these are the potential gateways. Such
potential gateways are then connected to one other master within range, with the following two limitations set
for this study:
• Each gateway belongs to a maximum of two piconets.
• Two piconets may have only one gateway between them.
When the gateway nodes have been selected, rendezvous points (RPs) are calculated between gateways
and masters according to the “maximum distance” algorithm described in subsection 2.1.1. Lastly, connections
(TCP or voice) are established between nodes. The
length of these connections may vary from 1 to 4 hops.
Fig. 2. Scatternet simulator and interface with NS Bluetooth/scatternet model.
Personal Area Networks: Bluetooth or IEEE 802.11?
Note that a hop in this context refers to a connection
passing over a gateway. This means that a 1-hop connection is internal to a piconet, a 2-hop connection goes
through one gateway, a 3-hop connection through 2
gateways, and so on. The proportion of 1-, 2-, 3-, and 4hop connections is also specified, where the number of
hops between two nodes is determined by the shortest
path between them.
For the simulations of the IEEE802.11b PAN system, the same node placement and connections are used,
but without any notion of Bluetooth-specific nodes or
functionality (masters, slaves, IPs, etc.). The dynamic
rate shifting in IEEE 802.11 is not modeled in these simulations, which are likely to overestimate the rate for
IEEE 802.11 in dense network cases.
In the simulations, the routing protocol used is
AODV. Each simulation is run for 32 s. For power consumption, we use the value from the Socket Communications Bluetooth card [19], which has a transmit and receive power consumption of 247 mW and a standby
power consumption of 4.6 mW (transmit current of 75
mA, standby current of 1.4 mA, and an operating voltage of 3.3 V).
4.2. Piconets
In this section, the performance of IEEE 802.11 is
compared with Bluetooth piconets. The piconets are
overlaid on top of one another but do not connect to form
a scatternet; i.e., TCP connections must stay within a piconet. A 10 m-by-10 m area is considered in this experiment. In the case of Bluetooth, masters of piconets are
given random positions. For each master, five slaves are
placed at random positions within a distance of 10 m
from the master. For the IEEE 802.11 case, the same
placement of nodes as the one for Bluetooth is used.
Since the total area is 10 m by 10 m, all nodes can interfere with each other.
A greedy TCP connection is established between
each slave and its master for Bluetooth (and between the
corresponding units for IEEE 802.11), which starts at 0.2
s and goes till the end of the simulation. Each simulation
runs for 32 s, and the number of piconets in the topology
is increased from 1 to 5. Note that all figures are plotted
with the “number of Bluetooth piconets” as the x-axis.
Although the notion of piconets does not apply to IEEE
802.11, the “number of Bluetooth piconets” is used as
the metric since the same topology is used both for Bluetooth and IEEE 802.11. Moreover, each piconet is assumed to correspond to a PAN in this study and, thus, the
number of piconets is equal to the number of PANs.
97
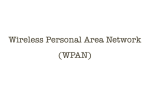
Fig. 3. TCP throughput of PANs using IEEE 802.11 and Bluetooth
piconets. Note that no scatternets are used in this simulation.
Figure 3 shows the total and average throughputs of
all the TCP connections for Bluetooth and IEEE 802.11
against the number of Bluetooth piconets. As the number
of piconets (number of nodes for IEEE 802.11) increases, Bluetooth adds capacity due to overlaid piconets. IEEE 802.11, on the other hand, sees a larger
number of collisions, since the number of TCP connections increases with an increasing number of piconets.
This supports the discussion on MAC and channel management in subsection 3.1 very well. It was expected that
IEEE 802.11 would provide a very good performance at
low loads but that Bluetooth would handle dense network conditions better. The TCP performance of IEEE
802.11 is better until five overlaid PANs (piconets),
which is about 30 nodes (6 nodes per piconet).
However, the performance of each individual TCP
connection for the IEEE 802.11 turns out to be very different, indicating an unfair distribution of the shared
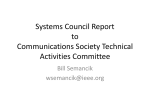
bandwidth of the channel. In Fig. 4, the TCP throughput
for each flow in the case of five PANs is shown. In the
case of Bluetooth, each TCP connection gets a throughput of approximately 0.132 Mbps (indicated by the
dashed line in Fig. 4). For IEEE 802.11, on the other
hand, there is an unfairness in distribution of bandwidth
due to an interaction between the TCP end-to-end flow
control mechanism and the MAC of the IEEE 802.11.
The MAC will introduce a high variability of packet delays and also a loss of packets. This causes TCP to back
off and issue fewer packets to the MAC layer that expects a persistent flow of packets in order to be fair. The
result is that the TCP connections that do manage to get
more credits (larger congestion windows) will “capture”
more of the capacity, while those TCP connections that
have smaller congestion windows will keep trying to ac-
98
Johansson, Kapoor, Kazantzidis, and Gerla
Moreover, for Bluetooth, the amount of energy consumed by slaves is, in general, much lower (about 1/5, in
these experiments) than that consumed by masters since
a slave may go to sleep if a packet is not intended for it.
Thus, some nodes (masters) in Bluetooth consume more
energy than others (slaves), whereas in IEEE 802.11, all
nodes consume similar energy. From a practical point of
view, some units (laptops, etc.) in a PAN may have a
higher battery capacity compared to other, smaller units
(headsets, mp3 players, etc.). Thus, the pattern of energy
usage in Bluetooth may be considered more suited to the
nonhomogenous units of a PAN.
Fig. 4. TCP throughputs of individual flows in the IEEE 802.11 case
with 5 PANs (solid), compared with the performance of the corresponding Bluetooth case (dashed).
cess the high-load channel with the few packets their
TCP congestion windows allow for. The result is a randomly unfair TCP performance for IEEE 802.11 in the
dense ad hoc PAN environment.
Figure 5 shows the energy efficiency of IEEE
802.11 and Bluetooth against the number of piconets.
The energy efficiency is defined as the number of
megabits of user data transferred in the network, divided
by the total amount of energy (in joules) consumed by all
nodes. We can see that Bluetooth becomes more energy
efficient than IEEE 802.11 when the number of piconets
is greater than three. An interesting point to note here is
that the energy efficiency for Bluetooth nodes stays approximately the same with increasing piconets, whereas
the energy efficiency of IEEE 802.11 nodes falls rapidly.
Fig. 5. The energy efficiency for the IEEE 802.11 and Bluetooth
PANs. The Bluetooth PANs use piconets only, which means that TCP
connections stay within the piconets.
4.3. Scatternets
In this section, the performance of IEEE 802.11 is
compared with Bluetooth scatternets in the PAN scenario. The Bluetooth scatternets are generated as explained in Section 4.1.2.
4.3.1. All Nodes Within Range
An area of 10 m by 10 m is first considered, such
that all nodes are within range of each other. Bluetooth
scatternets are created, with the number of piconets varying from 4 to 16, hosting a total number of greedy TCP
connections equal to twice the number of piconets. The
TCP connections are 1, 2, 3, or 4 hops in the ratio of
0.4:0.3:0.2:0.1, respectively, where the number of hops
is as explained in Section 4.1.2. Note that in the four piconets case, the longest TCP connections were threehop; i.e., there were no 4 hop connections. Moreover, the
IEEE 802.11 can still use direct links and avoid multihop
TCP connections.
Figure 6 shows the total and average throughputs of
all the TCP connections for Bluetooth and IEEE 802.11
Fig. 6. TCP throughput of PANs using IEEE 802.11 and Bluetooth
scatternets. All the nodes are within radio range of each other.
Personal Area Networks: Bluetooth or IEEE 802.11?
Fig. 7. The energy efficiency for the IEEE 802.11 and Bluetooth
PANs. The Bluetooth PANs use scatternets, which means that the TCP
connections may traverse several hops across the scatternet.
against the number of Bluetooth piconets. As can be
seen, Bluetooth adds capacity as the number of piconets
increases and does better than IEEE 802.11 when the
number of piconets is more than 12. Note that the
throughput in this case would be very dependent on the
mix of 1-, 2-, 3-, and 4-hop connections. A rather large
number of the TCP connections are expected to be between master and slaves of the same piconet; hence, the
percentage of 1-hop connections has been chosen to be
40%. These simulations indicate that the introduction of
scatternets, and thereby multihop TCP connections, will
result in less performance for Bluetooth compared to
IEEE 802.11.
Figure 7 shows the energy efficiency of IEEE
802.11 and Bluetooth against the number of piconets.
Bluetooth is more energy efficient than IEEE 802.11
when the number of piconets is more than 6. Since Blue-
99
tooth uses multihop connections to carry the traffic, more
energy is used than in the pure piconet case.
The previous experiment was repeated with a mix
of TCP and voice traffic. Again, the number of connections is equal in number to twice the number of piconets.
Out of these, 50% are greedy TCP and 50% are voice
connections. The voice connections are modeled according to the Brady model [18]. In particular, the voice connections are “on-off” sources. The on and off times are
exponentially distributed, with mean 1 s and 1.35 s, respectively. The voice-coding rate is 8 kbit/s and the
packetisation period is 20 ms, which gives a payload size
of 20 bytes. Header compression is assumed for voice
packets in Bluetooth, and the total packet size is 30
bytes. Voice packets are sent using RTP over UDP. Note
that the voice connections in the Bluetooth case use ACL
links and that some connections pass through interpiconet gateways, which add a rather significant delay.
Typically, such connections would carry streaming audio
rater than interactive voice.
Only the voice results are shown here since the TCP
results are very similar to the results presented earlier.
Figures 8(a) and (b) show the cumulative distributions
for voice delay in IEEE 802.11 and Bluetooth, respectively, for different numbers of Bluetooth piconets.
When the network becomes dense (larger number of
Bluetooth piconets), voice packets suffer larger delays in
IEEE 802.11 compared to Bluetooth. In Bluetooth, on
the other hand, voice delays are largely unaffected by increasing network density. The controlled access to the
channel and polling in Bluetooth ensure low voice delays. These figures do not show the complete picture,
though, since only voice packets that reach the destination are represented. Some voice packets may be
dropped due to queue overflow or retransmission limit
Fig. 8. Cumulative distribution for voice delay traffic in the PAN.
100
Johansson, Kapoor, Kazantzidis, and Gerla
Table I. Packet Loss Rates for the Voice Traffic.
Piconets
IEEE 802.11
Bluetooth
4
8
12
16
0
0.203984
0.392624
0.644025
0
0
0.167067
0.1885
(as in IEEE 802.11). Table I shows the packet loss rates
for voice for IEEE 802.11 and Bluetooth. The loss rates
are significantly higher in IEEE 802.11 than in Bluetooth. When the network is very dense, IEEE 802.11
tends to drop a high percentage of voice packets, while
Bluetooth still delivers more than 80% of the packets.
4.3.2. All Nodes Not Within Range
In this set of experiments an area of 40 m by 40 m
is considered such that all nodes are not within range of
each other and radio multihops need to be used. Bluetooth scatternets are created as described in subsection
4.1.2, with the number of piconets varying from 12 to 20.
The number of connections is equal to twice the number
of piconets. The type of connection is TCP or voice in
the ratio 1:1, and these connections traverse 1, 2, 3, or 4
hops in the ratio 0.4:0.3:0.2:0.1, respectively.
Table II shows the total throughputs obtained by
TCP connections for IEEE 802.11 and Bluetooth for different numbers of piconets. As can be seen, the throughputs for IEEE 802.11 and Bluetooth are very similar. It
is interesting to note that IEEE 802.11 also adds capacity as the number of piconets increases. Since the area
(40 m by 40 m) is larger than the assumed low-power
range of IEEE 802.11, spatial reuse of the channel results
in this increase. However, Fig. 9 shows that the energy
efficiency of Bluetooth is clearly higher than that of
IEEE 802.11 in this environment. Thus, in spite of the
scatternet scheduling overhead, the Bluetooth channel
management principles provide a more efficient way to
carry the information over multiple hops.
Table III shows the loss rates for voice for IEEE
802.11 and Bluetooth. Since the loss rates are very high,
no voice delay graphs are shown since these will not be
Table II. Throughput Values for the TCP Connections in the
Multihop Scenario.
Fig. 9. The energy efficiency in the multihop case (40 m by 40 m) for
Bluetooth and IEEE 802.11 for a dense PAN scenario. Clearly, Bluetooth provides the best energy efficiency.
representative of actual voice behavior. Both Bluetooth
and IEEE 802.11 have very high voice loss rates in this
scenario. Note that we have used the ACL link for voice in
Bluetooth; use of the SCO link may give different values.
Figure 10 shows the average throughput obtained
by TCP connections going over different numbers of
hops for the 20 piconet case, where a hop in a scatternet
is as defined in subsection 4.1.2. In the case of IEEE
802.11, these connections may not traverse as many hops
as in Bluetooth, since there is no underlying scatternet
dictating which nodes have a link between them. Thus,
in IEEE 802.11, two nodes can directly exchange data if
they are within radio range, while this may not be true
for Bluetooth. As seen in Fig. 10, large-hop connections
in Bluetooth get less throughput than in IEEE 802.11,
while small-hop connections do better than in IEEE
802.11. This is mainly due to the fact that connections in
IEEE 802.11 may traverse a smaller number of hops than
in Bluetooth.
5. CONCLUSIONS AND FURTHER WORK
This study was motivated by the foreseen availability of IEEE 802.11 radios in small handheld devices such
as PDAs and potentially also in other typically lowpower devices (game terminals, cameras, etc.). This deTable III. Packet Losses for Voice for Bluetooth and IEEE 802.11
in the Multihop PAN Scenario (Both systems show a significant loss
at high network densities.).
Piconets
IEEE 802.11
Bluetooth
Number of Bluetooth Piconets
IEEE 802.11
Bluetooth
12
16
20
3.455
4.07
4.792
3.432
4.472
4.98
12
16
20
0.305625
0.552902
0.568281
0.043021
0.44183
0.519875
Personal Area Networks: Bluetooth or IEEE 802.11?
Fig. 10. Average TCP throughput as function of the number of hops
for the same connection in the Bluetooth case. Note that the IEEE
802.11 connections may pass fewer hops.
velopment is primarily driven by the fact that these devices are capable of operating as IP hosts; i.e., they can
take part in an IEEE 802.11-based Internet access infrastructure. The deployment of the latter is currently a fastgrowing trend in homes, offices, and also in public
places. Thus, Internet access is currently the driver to
equip these devices with an IEEE 802.11 radio. However, the IEEE 802.11 standard also enables the terminals to operate peer-to-peer in an ad hoc manner and
could potentially be used to create PANs and provide
connectivity between the handheld devices.
In the PAN context, Bluetooth is seen as the preferred technology since it promises a lower price and
power consumption than IEEE 802.11. However, the recent product developments of IEEE 802.11 radio modules (CMOS single-chip solutions) may decrease both
the price gap as well as the power consumption gap between these technologies quite significantly. The issue
then becomes what impact other characteristics (apart
from price and transceiver output power) have on the
PAN performance, which was also the focus of this
study. Given that the IEEE 802.11 radio has comparable
power consumption to the Bluetooth radio, their differences in MAC principles, spectrum management, and
networking become decisive for PAN performance in
various environments.
The simulation experiments herein reveal that one
important property of Bluetooth lies in its ability to add
capacity as the number of units (piconets) increases.
However, the higher link rate of IEEE 802.11 makes it
an interesting alternative when the network is sparse
(fewer nodes, low number of connections). This arises
from the difference in how the spectrum is managed.
IEEE 802.11 uses a wider broadcast channel (22 MHz)
and applies a random access scheme (CSMA/CA) that
works well when few nodes compete for access. When
101
the traffic load increases, the resulting user capacity decreases rather rapidly due to an increase in the number of
packet collisions between nodes contending for access.
Bluetooth, on the other hand, uses a rather narrow channel of 1 Mhz per piconet and applies a FHSS scheme to
avoid collisions. This gives an underutilized spectrum,
i.e., low data rates, when the network has few active
nodes but provides a very robust and predictable user capacity as the network traffic and number of nodes increases.
The reasoning above also has a considerable impact
on the power consumption in the two systems. The fact
that the energy efficiency of Bluetooth remains the same
even as the network becomes dense makes it more predictable, as opposed to IEEE 802.11, whose energy efficiency falls rapidly due to the increased number of
packet collisions, thereby wasting power. However, at
low traffic loads, IEEE 802.11 shows a better energy efficiency than Bluetooth. In addition, the master unit of
Bluetooth will in general consume more energy than the
slaves due to its packet forwarding role within the piconet. Note that the study assumes the IEEE 802.11 radio
is operating at the same power level as Bluetooth (0
dBm), which may be a best case for the IEEE 802.11
radio; a slightly higher power consumption may be expected for the IEEE 802.11 radio.
When the overall, averaged throughput was comparable between the systems, an unfair capacity sharing
could be observed between the TCP connections in IEEE
802.11 PANs. This arises from an interaction between
the MAC and the TCP flow-control mechanism in high
traffic load conditions, such as in a dense PAN. Bluetooth will, under the same conditions, offer a very fair
distribution of the TCP capacity among the TCP connections. Thus, the robustness property of Bluetooth with
respect to network traffic load applies to TCP fairness as
well. Moreover, Bluetooth may be able to provide better
support for voice connections (QoS, etc.), though in a
sparse network, again, IEEE 802.11 is able to support
voice due to its superior link rate. Also, PANs will, in
general, consist of dissimilar nodes with different battery
capacity. For example, a laptop may have a larger
amount of energy than other, smaller units and the nature
of Bluetooth’s energy consumption, in which one unit
(the master) consumes more energy than other units, may
prove to be a better fit for a PAN.
An area that needs to be investigated further and introduced to the PAN analysis is the performance when
nodes are mobile. Bluetooth’s Inquiry procedures may
make handoffs very time-consuming and may also cause
long periods of network partitioning. IEEE 802.11, being
connectionless, is not expected to have too much of drop
102
in performance in the face of mobility. This study also
identified some opportunities to improve the IEEE
802.11 ad hoc functionality in order to mitigate some of
its deficiencies pointed out in the analysis. Moreover, the
dynamic rate shifting with increasing channel errors in
IEEE 802.11b is not modeled in the simulator. This functionality is expected to give IEEE 802.11 an even steeper
decline in the simulated throughput as the interference
(number of PANs) increases.
Perhaps the most important contribution of this
study is the message that the choice of technology for
PAN may not be obvious. It depends to a very large extent on the expected network environment and applications for PANs:
If PANs operates in very dense environments that have
very high interference and the applications require a
stable, sustained performance in terms of both delay
and throughput, e.g., interactive services (voice,
video), Bluetooth would be a good candidate. Moreover, Bluetooth also gives a robust power consumption, which is almost independent of the interference level—a battery will last the same amount
of time in both a low as well as a high interference
environment.
If PANs mostly operate in environments with a rather
low node density or low interference levels and the
applications in the PAN require high peak rates in a
rather bursty manner, e.g., download-type services
with limited real-time requirements, the IEEE
802.11 could be a good candidate. Moreover, if the
devices are mobile, the random access of IEEE
802.11 makes it easier to find new neighboring
nodes. In addition, devices of a PAN based on IEEE
802.11 can directly access any IEEE 802.11-based
infrastructure, using the same interface. However, it
should be pointed out that the power consumption
and link rate estimates versus number of interfering
nodes presented in this study is most likely a “bestcase” scenario for IEEE 802.11. More detailed
models of IEEE 802.11 may give less favorable results.
Johansson, Kapoor, Kazantzidis, and Gerla
4. IEEE 802.15 Coexistence Task Group 2 (TG2) for Wireless Personal Area Networks娃. URL: http://www.ieee802.org/15/pub/
TG2.html (2001-10-11). (Work in Progress).
5. IEEE 802.11e, MAC Enhancements for Quality of Service, URL:
http://www.ieee802.org/11/ (2001-10-11). (Work in Progress).
6. Wireless Ethernet Compatibility Alliance, URL: http://www.
weca.net/ (2001-10-11).
7. M. Frodigh, P. Johansson, and P. Larsson, Wireless ad hoc networking—The art of networking without a network, Ericsson Review, No. 4, 2000.
8. J. C. Haartsen, Bluetooth: A new radio interface providing ubiquitous connectivity, IEEE VTC, 2000—Spring, pp. 107–111.
9. A. Capone, R. Kapoor, and M. Gerla, Efficient polling schemes for
Bluetooth picocells, ICC, 2001.
10. S. Zürbes, W. Stahl, K. Matheus, and J. Haartsen, Radio network
performance of Bluetooth, Proceedings of International Conference of Communications, New Orleans, June 2000.
11. T. Salonidis, P. Bhagwat, L. Tassiulas, and R. LaMaire, Distributed topology construction of Bluetooth personal area networks,
Proceedings of IEEE INFOCOM 2001, Anchorage, Alaska, USA,
April 22–26, 2001.
12. S. Basagni, I. Chlamtac, and G. V. Záruba, Bluetrees—Scatternet
formation and routing in Bluetooth-based ad hoc networks, Proceedings of IEEE INFOCOM 2001, Anchorage, Alaska, USA,
April 22–26, 2001.
13. A. Das, A. Ghose, A. Razdan, H. Saran, and R. Shorey, Enhancing performance of asynchronous data traffic over the Bluetooth
wireless ad-hoc network, Proceedings of IEEE INFOCOM 2001,
Anchorage, Alaska, USA, April 22–26, 2001.
14. G. Miklós, A. Rácz, Z. Turányi, A. Valkó, and P. Johansson, Performance aspects of Bluetooth scatternet formation, Poster session
Mobihoc 2000, Boston, Massachusetts, August 11, 2000.
15. N. Johansson, U. Körner, and L. Tassiulas, A distributed scheduling algorithm for a Bluetooth scatternet, Seventeenth International
Teletraffic Congress, ITC’ 17, Salvador da Bahia, Brazil, September 24–28, 2001.
16. Network simulator (NS-2), www-mash.cs.berkeley.edu/ns/
17. C. Perkins and E. Royer, Ad-hoc on-demand distance vector routing, Mobile Computing Systems and Applications, 1999, Proceedings, WMCSA ’99, Second IEEE Workshop, 1999, pp. 90–100.
18. P. T. Brady, A model for generating on-off speech patterns in twoway conversation, Bell System Technical Journal, pp. 2445–2471,
Sept. 1969.
19. Socket Communications Bluetooth Card specifications,
http://www.socketcom.com/product/bluetoothcard.htm
REFERENCES
1. Specification of the Bluetooth System - Core vol. 1 v1.1,
www.bluetooth.com
2. Mobile Ad hoc Networks (MANET). URL: http://www.ietf.
org/html.charters/manet-charter.html. (2001-10-11). (Work in
Progress).
3. P. Johansson, M. Kazantzidis, R. Kapoor, and M. Gerla, Bluetooth:
An enabler for personal area networking, IEEE Network, Vol. 15,
No. 5, September 2001.
Per Johansson ([email protected]), Tekn. Lic., is a
senior researcher of Ericsson Corporate Research, Stockholm, Sweden.
He joined Ericsson in 1992 to work in the areas of traffic management
and performance analysis of ATM networks. He later moved into research on wireless systems, where his research has focused on ad hoc
Personal Area Networks: Bluetooth or IEEE 802.11?
103
networks and, in particular, on Bluetooth ad hoc networking. Since
1998 he has managed a research team at Ericsson Research that focuses
on IP networking aspects of Bluetooth. Currently, he is a visiting researcher at the Wireless Adaptive Mobility Lab at the University of
California, Los Angeles (UCLA), where he takes an active part in the
Bluetooth ad hoc networking research.
Manthos I. Kazantzidis ([email protected]) received his
diploma degree in computer engineering and informatics in 1995 from
the University of Patras, Greece. He received his M.S. in computer science in 1998 from the University of California, Los Angeles, and is
currently a Ph.D. candidate at UCLA. His research focuses on adaptive
multimedia over networks with wireless and mobile links, and he is a
member of the Wireless Adaptive Mobility Lab at UCLA.
Rohit Kapoor ([email protected]) received his B.E. in computer science in 1999 from the University of Roorkee, India. He is currently a Ph.D. candidate at the University of California, Los Angeles
(UCLA). His research focuses on performance issues in Bluetooth piconets and scatternets. He is a member of the Network Research Lab
at UCLA.
Mario Gerla ([email protected]) is a professor in the Computer
Science Department at UCLA. He received his graduate degree in engineering from the Politecnico di Milano in 1966, and his M.S. and
Ph.D. degrees in engineering from UCLA in 1970 and 1973, respectively. He joined the faculty of the UCLA Computer Science Department in 1977. His current research is in the area of analysis, design,
and control of communication networks. Ongoing projects include the
design and evaluation of QoS routing and multicast algorithms for IP
domains, the design and evaluation of all-optical network topologies
and access protocols, the design of wireless mobile, multimedia networks for mobile computing applications, and the development of
measurement methods and tools for evaluating the performance of
high-speed networks and applications.