Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Resilient control systems wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Mains electricity wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Buck converter wikipedia , lookup
Alternating current wikipedia , lookup
Thermal runaway wikipedia , lookup
Distributed control system wikipedia , lookup
Opto-isolator wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Rectiverter wikipedia , lookup
Lumped element model wikipedia , lookup
Control theory wikipedia , lookup
PID controller wikipedia , lookup
CONTENTS
ABSTRACT
OVERVIEW OF BHEL
BRIEF DESCRIPTION
DESCRIPTION OF EACH COMPONENT
RTD
THERMOCOUPLES
CONTROLLERS
ON-OFF CONTROLLER
PROPORTIONAL CONTROLLER
PID CONTROLLER
RELAYS
OPERATION PROCEDURE
CONCLUSION
APPLICATIONS
BIBLIOGRAPHY
ABSTRACT
The main objective of this product is to make a temperature sensing device which can be
used to relatively sense the temperature within a particular range and temperature component can
as well be controlled by making use of controllers and the flow can be constantly monitored with
the help of relay and load
Several components are made use of within the project and their description in detail, along with
functioning and applications are enlisted further with a clear objective towards the project
entitled
In the first phase, depending upon the temperature range and the environment the product is
subjected to, a valid transducer or a sensor is selected. When the temperature range is
comparatively less, RTD can be opted for and when it is subjected to wider range, thermocouple
can be taken up
Second phase deals with selecting the valid controller best suited for the range depending upon
the type of sensor used in the first phase. It as well depends upon the kind of accuracy and
precision to be required and ranges with dealing from simple on-off controller to highly rated
PID controllers
Third phase involves, making use of relay for efficient regulating of supply and the output can be
monitored constantly by making use of a load which would be a continuous indicator of the
ongoing process within the set points tuned into the controllers.
Thus after the product is finally made, set points are tuned into the controller and when the RTD
end of the set up is made to come in contact with the relatively variable degree of temperature,
the flow is constantly showed with the help of load and when the set point is crossed the
indication is accordingly given. Thus the temperature can be constantly measured and monitored
by making use of this apparatus.
Resistance thermometer
Resistance thermometers, also called resistance temperature detectors or resistive thermal
devices (RTDs), are temperature sensors that exploit the predictable change in electrical
resistance of some materials with changing temperature. As they are almost invariably made
of platinum, they are often called platinum resistance thermometers (PRTs). They are slowly
replacing the use of thermocouples in many industrial applications below 600 °C, due to higher
accuracy and repeatability.[1]
General description
There are many categories; carbon resistors, film, and wire-wound types are the most widely
used.
Carbon resistors are widely available and are very inexpensive. They have very reproducible
results at low temperatures. They are the most reliable form at extremely low temperatures.
They generally do not suffer from significant hysteresis or strain gauge effects. Carbon
resistors have been used for many years because of their advantages.
Film thermometers have a layer of platinum on a substrate; the layer may be extremely thin,
perhaps one micrometer. Advantages of this type are relatively low cost (the high cost of
platinum being offset by the tiny amount required) and fast response. Such devices have
improved performance although the different expansion rates of the substrate and platinum
give "strain gauge" effects and stability problems.
Wire-wound thermometers can have greater accuracy, especially for wide temperature
ranges. The coil diameter provides a compromise between mechanical stability and allowing
expansion of the wire to minimize strain and consequential drift.
Coil elements have largely replaced wire-wound elements in industry. This design has a wire
coil which can expand freely over temperature, held in place by some mechanical support
which lets the coil keep its shape. This design is similar to that of a SPRT, the primary
standard upon which ITS-90 is based, while providing the durability necessary for industrial
use.
The current international standard which specifies tolerance, and the temperature-to-electrical
resistance relationship for platinum resistance thermometers is IEC 751:1983. By far the most
common devices used in industry have a nominal resistance of 100 ohms at 0 °C, and are called
Pt100 sensors ('Pt' is the symbol for platinum). The sensitivity of a standard 100 ohm sensor is a
nominal 0.385 ohm/°C. RTDs with a sensitivity of 0.375 and 0.392 ohm/°C as well as a variety
of others are also available.
Function
Resistance thermometers are constructed in a number of forms and offer greater
stability, accuracy and repeatability in some cases than thermocouples. While thermocouples use
the Seebeck effect to generate a voltage, resistance thermometers use electrical resistance and
require a power source to operate. The resistance ideally varies linearly with temperature.
Resistance thermometers are usually made using platinum, because of its linear resistancetemperature relationship and its chemical inertness. The platinum detecting wire needs to be kept
free of contamination to remain stable. A platinum wire or film is supported on a former in such
a way that it gets minimal differential expansion or other strains from its former, yet is
reasonably resistant to vibration. RTD assemblies made from iron or copper are also used in
some applications.
Commercial platinum grades are produced which exhibit a change of resistance of
0.00385 ohms/°C (European Fundamental Interval) The sensor is usually made to have a
resistance of 100 Ω at 0 °C. This is defined in BS EN 60751:1996 (taken from IEC 60751:1995)
. The American Fundamental Interval is 0.00392 Ω/°C, based on using a purer grade of platinum
than the European standard. The American standard is from the Scientific Apparatus
Manufacturers Association (SAMA), who are no longer in this standards field. As a result the
"American standard" is hardly the standard even in the US.
Measurement of resistance requires a small current to be passed through the device under
test. This can cause resistive heating, causing significant loss of accuracy if manufacturers' limits
are not respected, or the design does not properly consider the heat path. Mechanical strain on
the resistance thermometer can also cause inaccuracy. Lead wire resistance can also be a factor;
adopting three- and four-wire, instead of two-wire, connections can eliminate connection lead
resistance effects from measurements; three-wire connection is sufficient for most purposes and
almost universal industrial practice. Four-wire connections are used for the most precise
applications.
Advantages and Limitations
Advantages of platinum resistance thermometers:
High accuracy
Low drift
Wide operating range
Suitable for precision applications
Limitations:
RTDs in industrial applications are rarely used above 660 °C. At temperatures above 660 °C
it becomes increasingly difficult to prevent the platinum from becoming contaminated by
impurities from the metal sheath of the thermometer. This is why laboratory standard
thermometers replace the metal sheath with a glass construction. At very low temperatures,
say below -270 °C (or 3 K), due to the fact that there are very few phonons, the resistance of
an RTD is mainly determined by impurities and boundary scattering and thus basically
independent of temperature. As a result, the sensitivity of the RTD is essentially zero and
therefore not useful.
Compared to thermistors, platinum RTDs are less sensitive to small temperature changes and
have a slower response time. However, thermistors have a smaller temperature range and
stability.
Sources of error:
The common error sources of a PRT are:
Interchangeability: the “closeness of agreement” between the specific PRT's Resistance vs.
Temperature relationship and a predefined Resistance vs. Temperature relationship,
commonly defined by IEC 60751.
Insulation Resistance: Error caused by the inability to measure the actual resistance of
element. Current leaks into or out of the circuit through the sheath, between the element
leads, or the elements.
Stability: Ability to maintain R vs. T over time as a result of thermal exposure.
Repeatability: Ability to maintain R vs. T under the same conditions after experiencing
thermal cycling throughout a specified temperature range.
Hysteresis: Change in the characteristics of the materials from which the RTD is built due to
exposures to varying temperatures.
Stem Conduction: Error that results from the PRT sheath conducting heat into or out of the
process.
Calibration/Interpolation: Errors that occur due to calibration uncertainty at the cal points, or
between cal point due to propagation of uncertainty or curve fit errors.
Lead Wire: Errors that occur because a 4 wires or 3 wire measurements is not used, this is
greatly increased by higher gauge wire.
2 wire connections add lead resistance in series with PRT element.
3 wire connections rely on all 3 leads having equal resistance.
Self Heating: Error produced by the heating of the PRT element due to the power applied.
Time Response: Errors are produced during temperature transients because the PRT cannot
respond to changes fast enough.
Thermal EMF: Thermal EMF errors are produced by the EMF adding to or subtracting from
the applied sensing voltage, primarily in DC systems.
Thermocouple
Thermocouple plugged to a multimeter displaying room temperature in °C.
A thermocouple is a junction between two different metals that produces
a voltage related to at temperature difference. Thermocouples are a widely used type
of temperature sensor for measurement and control and can also be used to convert heat into
electric power. They are inexpensive and interchangeable, are supplied fitted with standard
connectors, and can measure a wide range of temperatures. The main limitation is accuracy:
system errors of less than one degree Celsius (C) can be difficult to achieve.
Any junction of dissimilar metals will produce an electric potential related to
temperature. Thermocouples for practical measurement of temperature are junctions of
specific alloys which have a predictable and repeatable relationship between temperature and
voltage. Different alloys are used for different temperature ranges. Properties such as resistance
to corrosion may also be important when choosing a type of thermocouple. Where the
measurement point is far from the measuring instrument, the intermediate connection can be
made by extension wires which are less costly than the materials used to make the sensor.
Thermocouples are usually standardized against a reference temperature of 0 degrees Celsius;
practical instruments use electronic methods of cold-junction compensation to adjust for varying
temperature at the instrument terminals. Electronic instruments can also compensate for the
varying characteristics of the thermocouple, and so improve the precision and accuracy of
measurements.
Thermocouples are widely used in science and industry; applications include temperature
measurement for kilns, gas turbine exhaust, diesel engines, and other industrial processes.
A thermocouple measuring circuit with a heat source, cold junction and a measuring instrument
Principle of operation
In 1821, the German–Estonian physicist Thomas Johann Seebeck discovered that when any
conductor is subjected to a thermal gradient, it will generate a voltage. This is now known as
the thermoelectric effect or Seebeck effect. Any attempt to measure this voltage necessarily
involves connecting another conductor to the "hot" end. This additional conductor will then also
experience the temperature gradient, and develop a voltage of its own which will oppose the
original. Fortunately, the magnitude of the effect depends on the metal in use. Using a dissimilar
metal to complete the circuit creates a circuit in which the two legs generate different voltages,
leaving a small difference in voltage available for measurement. That difference increases with
temperature, and is between 1 and 70 microvolt’s per degree Celsius (µV/°C) for standard metal
combinations. The voltage is not generated at the junction of the two metals of the thermocouple
but rather along that portion of the length of the two dissimilar metals that is subjected to a
temperature gradient. Because both lengths of dissimilar metals experience the same temperature
gradient, the end result is a measurement of the temperature at the thermocouple junction.
Polynomial Coefficients 0500 °C
n Type K
1 25.08355
2 7.860106x10−2
3 -2.503131x10−1
4 8.315270x10−2
5 -1.228034x10−2
6 9.804036x10−4
Voltage–temperature relationship
7 -4.413030x10−5
For typical metals used in thermocouples, the output voltage
increases almost linearly with the temperature difference (ΔT)
8 1.057734x10−6
over a bounded range of temperatures. For precise
measurements or measurements outside of the linear
9 -1.052755x10−8
temperature range, non-linearity must be corrected.
The nonlinear relationship between the temperature difference
(ΔT) and the output voltage (mV) of a thermocouple can be approximated by a polynomial:
The coefficients an are given for n from 0 to between 5 and 13 depending upon the metals. In
some cases better accuracy is obtained with additional non-polynomial terms. A database of
voltage as a function of temperature, and coefficients for computation of temperature from
voltage and vice-versa for many types of thermocouple is available online.
In modern equipment the equation is usually implemented in a digital controller or stored in a
look-up table; older devices use analog circuits.
Piece-wise linear approximations are an alternative to polynomial corrections.
Cold junction compensation
Thermocouples measure the temperature difference between two points, not absolute
temperature. To measure a single temperature one of the junctions—normally the cold
junction—is maintained at a known reference temperature, and the other junction is at the
temperature to be sensed.
Having a junction of known temperature, while useful for laboratory calibration, is not
convenient for most measurement and control applications. Instead, they incorporate an artificial
cold junction using a thermally sensitive device such as a thermistor or diode to measure the
temperature of the input connections at the instrument, with special care being taken to minimize
any temperature gradient between terminals. Hence, the voltage from a known cold junction can
be simulated, and the appropriate correction applied. This is known as cold junction
compensation. Some integrated circuits such as the LT1025 are designed to output a
compensated voltage based on thermocouple type and cold junction temperature.
Types
Certain combinations of alloys have become popular as industry standards. Selection of
the combination is driven by cost, availability, convenience, melting point, chemical properties,
stability, and output. Different types are best suited for different applications. They are usually
selected based on the temperature range and sensitivity needed. Thermocouples with low
sensitivities (B, R, and S types) have correspondingly lower resolutions. Other selection criteria
include the inertness of the thermocouple material and whether it is magnetic or not. Standard
thermocouple types are listed below with the positive electrode first, followed by the negative
electrode.
K
Type K (chromel{90 percent nickel and 10 percent chromium}–alumel)(Alumel consisting of
95% nickel, 2% manganese, 2% aluminium and 1% silicon) is the most common general purpose
thermocouple with a sensitivity of approximately 41 µV/°C, chromel positive relative to
alumel. It is inexpensive, and a wide variety of probes are available in its −200 °C to +1350 °C /
-328 °F to +2462 °F range. Type K was specified at a time when metallurgy was less advanced
than it is today, and consequently characteristics vary considerably between samples. One of the
constituent metals, nickel, is magnetic; a characteristic of thermocouples made with magnetic
material is that they undergo a step change in output when the magnetic material reaches
its Curie point (around 354 °C for type K thermocouples).
E
Type E (chromel–constantan) has a high output (68 µV/°C) which makes it well suited
to cryogenic use. Additionally, it is non-magnetic.
J
Type J (iron–constantan) has a more restricted range than type K (−40 to +750 °C), but higher
sensitivity of about 55 µV/°C. The Curie pointof the iron (770 °C) causes an abrupt change in the
characteristic, which determines the upper temperature limit.
N
Type N (Nicrosil–Nisil) (Nickel-Chromium-Silicon/Nickel-Silicon) thermocouples are suitable
for use at high temperatures, exceeding 1200 °C, due to their stability and ability to resist high
temperature oxidation. Sensitivity is about 39 µV/°C at 900 °C, slightly lower than type K.
Designed to be an improved type K, it is becoming more popular.
Platinum types B, R, and S
Types B, R, and S thermocouples use platinum or a platinum–rhodium alloy for each conductor.
These are among the most stable thermocouples, but have lower sensitivity than other types,
approximately 10 µV/°C. Type B, R, and S thermocouples are usually used only for high
temperature measurements due to their high cost and low sensitivity.
B
Type B thermocouples use a platinum–rhodium alloy for each conductor. One conductor
contains 30% rhodium while the other conductor contains 6% rhodium. These thermocouples are
suited for use at up to 1800 °C. Type B thermocouples produce the same output at 0 °C and
42 °C, limiting their use below about 50 °C.
R
Type R thermocouples use a platinum–rhodium alloy containing 13% rhodium for one conductor
and pure platinum for the other conductor. Type R thermocouples are used up to 1600 °C.
S
Type S thermocouples are constructed using one wire of 90% Platinum and 10% Rhodium (the
positive or "+" wire) and a second wire of 100% platinum (the negative or "-" wire). Like type R,
type S thermocouples are used up to 1600 °C. In particular, type S is used as the standard of
calibration for the melting point of gold (1064.43 °C).
T
Type T (copper–constantan) thermocouples are suited for measurements in the −200 to 350 °C
range. Often used as a differential measurement since only copper wire touches the probes. Since
both conductors are non-magnetic, there is no Curie point and thus no abrupt change in
characteristics. Type T thermocouples have a sensitivity of about 43 µV/°C.
C
Type C (tungsten 5% rhenium – tungsten 26% rhenium) thermocouples are suited for
measurements in the 0 °C to 2320 °C range. This thermocouple is well-suited for vacuum
furnaces at extremely high temperatures. It must never be used in the presence of oxygen at
temperatures above 260 °C.
M
Type M thermocouples use a nickel alloy for each wire. The positive wire contains
18% molybdenum while the negative wire contains 0.8% cobalt. These thermocouples are used
in vacuum furnaces for the same reasons as with type C. Upper temperature is limited to
1400 °C. It is less commonly used than other types.
Chromel-gold/iron
In chromel-gold/iron thermocouples, the positive wire is chromel and the negative wire is gold
with a small fraction (0.03–0.15 atom percent) of iron. It can be used for cryogenic applications
(1.2–300 K and even up to 600 K). Both the sensitivity and the temperature range depend on the
iron concentration. The sensitivity is typically around 15 µV/K at low temperatures and the
lowest usable temperature varies between 1.2 and 4.2 K.
Laws for thermocouples
Law of homogeneous material
A thermoelectric current cannot be sustained in a circuit of a single homogeneous
material by the application of heat alone, regardless of how it might vary in cross section. In
other words, temperature changes in the wiring between the input and output do not affect the
output voltage, provided all wires are made of the same materials as the thermocouple. No
current flows in the circuit made of a single metal by the application of heat alone.
Law of intermediate materials
The algebraic sum of the thermoelectric emfs in a circuit composed of any number of
dissimilar materials is zero if all of the junctions are at a uniform temperature. So If a third metal
is inserted in either wire and if the two new junctions are at the same temperature, there will be
no net voltage generated by the new metal.
Law of successive or intermediate temperatures
If two dissimilar homogeneous materials produce thermal emf1 when the junctions are at
T1 and T2 and produce thermal emf2 when the junctions are at T2 and T3 , the emf generated
when the junctions are at T1 and T3 will be emf1 + emf2,provided T1<T2<T3.
Controller (control theory)
In control theory, a controller is a device which monitors and affects the operational
conditions of a given dynamical system. The operational conditions are typically referred to as
output variables of the system which can be affected by adjusting certain input variables. For
example, the heating system of a house can be equipped with a thermostat (controller) for
sensing air temperature (output variable) which can turn on or off a furnace or heater when the
air temperature becomes too low or too high.
In this example, the thermostat is the controller and directs the activities of the heater.
The heater is the processor that warms the air inside the house to the desired temperature (set
point). The air temperature reading inside the house is the feedback. And finally, the house is the
environment in which the heating system operates.
The notion of controllers can be extended to more complex systems. In the natural world,
individual organisms also appear to be equipped with controllers that assure
the homeostasis necessary for survival of each individual. Both human-made and natural systems
exhibit collective behaviors amongst individuals in which the controllers seek some form of
equilibrium.
Types of controllers
Most control valve systems in the past were implemented using mechanical systems or
solid state electronics. Pneumatics was often utilized to transmit information and control using
pressure. However, most modern control systems in industrial settings now rely on computers for
the controller. Obviously it is much easier to implement complex control algorithms on a
computer than using a mechanical system.
For feedback controllers there are a few simple types. The most simple is like the
thermostat that just turns the heat on if the temperature falls below a certain value and off it
exceeds a certain value (on-off control).
Another simple type of controller is a proportional controller. With this type of controller,
the controller output (control action) is proportional to the error in the measured variable.
On/Off Controller:
An on-off controller is the simplest form of temperature control device. The output from
the device is either on or off, with no middle state. An on-off controller will switch the output
only when the temperature crosses the setpoint. For heating control, the output is on when the
temperature is below the setpoint, and off above setpoint. Since the temperature crosses the
setpoint to change the output state, the process temperature will be cycling continually, going
from below setpoint to above, and back below. In cases where this cycling occurs rapidly, and to
prevent damage to contactors and valves, an on-off differential, or “hysteresis,” is added to the
controller operations. This differential requires that the temperature exceed setpoint by a certain
amount before the output will turn off or on again. On-off differential prevents the output from
“chattering” or making fast, continual switches if the cycling above and below the setpoint
occurs very rapidly. On-off control is usually used where a precise control is not necessary, in
systems which cannot handle having the energy turned on and off frequently, where the mass of
the system is so great that temperatures change extremely slowly, or for a temperature alarm.
One special type of on-off control used for alarm is a limit controller. This controller uses a
latching relay, which must be manually reset, and is used to shut down a process when a certain
temperature is reached.
PID controller
A block diagram of a PID controller
A proportional–integral–derivative controller (PID controller) is a generic control
loop feedback mechanism (controller) widely used in industrial control systems – a PID is the
most commonly used feedback controller. A PID controller calculates an "error" value as the
difference between a measured process variable and a desired setpoint. The controller attempts to
minimize the error by adjusting the process control inputs.
The PID controller calculation (algorithm) involves three separate parameters, and is
accordingly sometimes called three-term control: the proportional, the integral and
derivative values, denoted P, I, and D. Heuristically, these values can be interpreted in terms of
time: P depends on the present error, I on the accumulation of past errors, and D is a prediction
of future errors, based on current rate of change.[1] The weighted sum of these three actions is
used to adjust the process via a control element such as the position of a control valve or the
power supply of a heating element.
In the absence of knowledge of the underlying process, a PID controller is the best
controller.[2] By tuning the three constants in the PID controller algorithm, the controller can
provide control action designed for specific process requirements. The response of the controller
can be described in terms of the responsiveness of the controller to an error, the degree to which
the controller overshoots the set point and the degree of system oscillation. Note that the use of
the PID algorithm for control does not guarantee optimal control of the system or system
stability.
Some applications may require using only one or two modes to provide the appropriate
system control. This is achieved by setting the gain of undesired control outputs to zero. A PID
controller will be called a PI, PD, P or I controller in the absence of the respective control
actions. PI controllers are fairly common, since derivative action is sensitive to measurement
noise, whereas the absence of an integral value may prevent the system from reaching its target
value due to the control action.
Loop tuning
Tuning a control loop is the adjustment of its control parameters (gain/proportional band,
integral gain/reset, derivative gain/rate) to the optimum values for the desired control response.
Stability (bounded oscillation) is a basic requirement, but beyond that, different systems have
different behavior, different applications have different requirements, and requirements may
conflict with one another.
Some processes have a degree of non-linearity and so parameters that work well at fullload conditions don't work when the process is starting up from no-load; this can be corrected
by gain scheduling (using different parameters in different operating regions). PID controllers
often provide acceptable control using default tunings, but performance can generally be
improved by careful tuning, and performance may be unacceptable with poor tuning.
PID tuning is a difficult problem, even though there are only three parameters and in principle is
simple to describe, because it must satisfy complex criteria within the limitations of PID control.
There are accordingly various methods for loop tuning, and more sophisticated techniques are
the subject of patents; this section describes some traditional manual methods for loop tuning.
Stability
If the PID controller parameters (the gains of the proportional, integral and derivative
terms) are chosen incorrectly, the controlled process input can be unstable, i.e. its output
diverges, with or without oscillation, and is limited only by saturation or mechanical breakage.
Instability is caused by excess gain, particularly in the presence of significant lag.
Generally, stability of response (the reverse of instability) is required and the process
must not oscillate for any combination of process conditions and setpoints, though
sometimes marginal stability (bounded oscillation) is acceptable or desired.
Optimum behavior
Two basic requirements are regulation (disturbance rejection – staying at a given
setpoint) and command tracking (implementing setpoint changes) – these refer to how well the
controlled variable tracks the desired value. Specific criteria for command tracking include rise
time and settling time. Some processes must not allow an overshoot of the process variable
beyond the setpoint if, for example, this would be unsafe. Other processes must minimize the
energy expended in reaching a new setpoint.
Overview of methods
There are several methods for tuning a PID loop. The most effective methods generally
involve the development of some form of process model, and then choosing P, I, and D based on
the dynamic model parameters. Manual tuning methods can be relatively inefficient, particularly
if the loops have response times on the order of minutes or longer.
The choice of method will depend largely on whether or not the loop can be taken
"offline" for tuning, and the response time of the system. If the system can be taken offline, the
best tuning method often involves subjecting the system to a step change in input, measuring the
output as a function of time, and using this response to determine the control parameters.
Choosing a Tuning Method
Method
Advantages
Disadvantages
Manual
Tuning
No math required. Online method.
Requires experienced personnel.
Ziegler–
Nichols
Proven Method. Online method.
Process upset, some trial-and-error,
very aggressive tuning.
Software
Tools
Consistent tuning. Online or offline method.
May include valve and sensor analysis. Allow
Some cost and training involved.
simulation before downloading. Can support
Non-Steady State (NSS) Tuning.
CohenCoon
Good process models.
Some math. Offline method. Only
good for first-order processes.
Manual tuning
If the system must remain online, one tuning method is to first set Ki and Kd values to
zero. Increase the Kp until the output of the loop oscillates, then the Kp should be set to
approximately half of that value for a "quarter amplitude decay" type response. Then
increase Ki until any offset is correct in sufficient time for the process. However, too
much Ki will cause instability. Finally, increase Kd, if required, until the loop is acceptably quick
to reach its reference after a load disturbance. However, too much Kd will cause excessive
response and overshoot. A fast PID loop tuning usually overshoots slightly to reach the setpoint
more quickly; however, some systems cannot accept overshoot, in which case an overdamped closed-loop system is required, which will require a Kp setting significantly less than
half that of the Kp setting causing oscillation.
Effects of increasing a parameter independently
Parameter Rise time
Overshoot
Settling time Steady-state error Stability
Kp
Decrease
Increase
Small change Decrease
Ki
Decrease
Increase
Increase
Decrease
significantly
Degrade
Kd
Minor
decrease
Minor
decrease
Minor
decrease
No effect in theory
Improve
if Kd small
Degrade
Ziegler–Nichols method.
Another heuristic tuning method is formally known as the Ziegler–Nichols method,
introduced by John G. Ziegler and Nathaniel B. Nichols in the 1940s. As in the method above,
the Ki and Kd gains are first set to zero. The P gain is increased until it reaches the ultimate
gain, Ku, at which the output of the loop starts to oscillate. Ku and the oscillation period Pu are
used to set the gains
Limitations of PID control
While PID controllers are applicable to many control problems, and often perform
satisfactorily without any improvements or even tuning, they can perform poorly in some
applications, and do not in general provide optimal control. The fundamental difficulty with PID
control is that it is a feedback system, with constant parameters, and no direct knowledge of the
process, and thus overall performance is reactive and a compromise – while PID control is the
best controller with no model of the process, better performance can be obtained by
incorporating a model of the process.
The most significant improvement is to incorporate feed-forward control with knowledge
about the system, and using the PID only to control error. Alternatively, PIDs can be modified in
more minor ways, such as by changing the parameters (either gain scheduling in different use
cases or adaptively modifying them based on performance), improving measurement (higher
sampling rate, precision, and accuracy, and low-pass filtering if necessary), or cascading multiple
PID controllers.
PID controllers, when used alone, can give poor performance when the PID loop gains
must be reduced so that the control system does not overshoot, oscillate or hunt about the control
setpoint value. They also have difficulties in the presence of non-linearities, may trade off
regulation versus response time, do not react to changing process behavior (say, the process
changes after it has warmed up), and have lag in responding to large disturbances.
Linearity
Another problem faced with PID controllers is that they are linear, and in particular
symmetric. Thus, performance of PID controllers in non-linear systems (such as HVAC
systems) is variable. For example, in temperature control, a common use case is active
heating (via a heating element) but passive cooling (heating off, but no cooling), so
overshoot can only be corrected slowly – it cannot be forced downward. In this case the
PID should be tuned to be overdamped, to prevent or reduce overshoot, though this
reduces performance (it increases settling time).
Noise in derivative
A problem with the derivative term is that small amounts of measurement or
process noise can cause large amounts of change in the output. It is often helpful to filter the
measurements with a low-pass filter in order to remove higher-frequency noise components.
However, low-pass filtering and derivative control can cancel each other out, so reducing noise
by instrumentation means is a much better choice. Alternatively, a nonlinear median filter may
be used, which improves the filtering efficiency and practical performance. In some case, the
differential band can be turned off in many systems with little loss of control. This is equivalent
to using the PID controller as a PI controller.
Relay
Automotive-style miniature relay, dust cover is taken off
A relay is an electrically operated switch. Many relays use an electromagnet to operate a
switching mechanism mechanically, but other operating principles are also used. Relays are used
where it is necessary to control a circuit by a low-power signal (with complete electrical isolation
between control and controlled circuits), or where several circuits must be controlled by one
signal. The first relays were used in long distance telegraph circuits, repeating the signal coming
in from one circuit and re-transmitting it to another. Relays were used extensively in telephone
exchanges and early computers to perform logical operations.
A type of relay that can handle the high power required to directly drive an electric motor
is called a contractor. Solid-state relays control power circuits with no moving parts, instead
using a semiconductor device to perform switching. Relays with calibrated operating
characteristics and sometimes multiple operating coils are used to protect electrical circuits from
overload or faults; in modern electric power systems these functions are performed by digital
instruments still called "protective relays".
Basic design and operation
Simple electromechanical relay
Small relay as used in electronics
A simple electromagnetic relay consists of a coil of wire surrounding a soft iron core, an
iron yoke which provides a low reluctance path for magnetic flux, a movable iron armature, and
one or more sets of contacts (there are two in the relay pictured). The armature is hinged to the
yoke and mechanically linked to one or more sets of moving contacts. It is held in place by
a spring so that when the relay is de-energized there is an air gap in the magnetic circuit. In this
condition, one of the two sets of contacts in the relay pictured is closed, and the other set is open.
Other relays may have more or fewer sets of contacts depending on their function. The relay in
the picture also has a wire connecting the armature to the yoke. This ensures continuity of the
circuit between the moving contacts on the armature, and the circuit track on the printed circuit
board (PCB) via the yoke, which is soldered to the PCB.
When an electric current is passed through the coil it generates a magnetic field that
attracts the armature and the consequent movement of the movable contact either makes or
breaks (depending upon construction) a connection with a fixed contact. If the set of contacts
was closed when the relay was de-energized, then the movement opens the contacts and breaks
the connection, and vice versa if the contacts were open. When the current to the coil is switched
off, the armature is returned by a force, approximately half as strong as the magnetic force, to its
relaxed position. Usually this force is provided by a spring, but gravity is also used commonly in
industrial motor starters. Most relays are manufactured to operate quickly. In a low-voltage
application this reduces noise; in a high voltage or current application it reduces arcing.
When the coil is energized with direct current, a diode is often placed across the coil to
dissipate the energy from the collapsing magnetic field at deactivation, which would otherwise
generate a voltage spike dangerous to semiconductor circuit components. Some automotive
relays include a diode inside the relay case. Alternatively, a contact protection network
consisting of a capacitor and resistor in series (snubber circuit) may absorb the surge. If the coil
is designed to be energized with alternating current (AC), a small copper "shading ring" can be
crimped to the end of the solenoid, creating a small out-of-phase current which increases the
minimum pull on the armature during the AC cycle.
A solid-state relay uses a thyristor or other solid-state switching device, activated by the
control signal, to switch the controlled load, instead of a solenoid. An optocoupler (a lightemitting diode (LED) coupled with a photo transistor) can be used to isolate control and
controlled circuits.
Types
Latching relay
A latching relay has two relaxed states (bistable). These are also called "impulse",
"keep", or "stay" relays. When the current is switched off, the relay remains in its last state. This
is achieved with a solenoid operating a ratchet and cam mechanism, or by having two opposing
coils with an over-center spring or permanent magnet to hold the armature and contacts in
position while the coil is relaxed, or with a remanent core. In the ratchet and cam example, the
first pulse to the coil turns the relay on and the second pulse turns it off. In the two coil example,
a pulse to one coil turns the relay on and a pulse to the opposite coil turns the relay off. This type
of relay has the advantage that it consumes power only for an instant, while it is being switched,
and it retains its last setting across a power outage. A remanent core latching relay requires a
current pulse of opposite polarity to make it change state.
Reed relay
A reed relay is a reed switch enclosed in a solenoid. The switch has a set of contacts
inside an evacuated or inert gas-filled glass tube which protects the contacts against
atmospheric corrosion; the contacts are made of magnetic material that makes them move under
the influence of the field of the enclosing solenoid. Reed relays can switch faster than larger
relays, require only little power from the control circuit, but have low switching current and
voltage ratings.
Top, middle: reed switches, bottom: reed relay
Mercury-wetted relay
A mercury-wetted reed relay is a form of reed relay in which the contacts are wetted with
mercury. Such relays are used to switch low-voltage signals (one volt or less) where the mercury
reduces the contact resistance and associated voltage drop, for low-current signals where surface
contamination may make for a poor contact or for high-speed applications where the mercury
eliminates contact bounce. Mercury wetted relays are position-sensitive and must be mounted
vertically to work properly. Because of the toxicity and expense of liquid mercury, these relays
are now rarely used. See also mercury switch.
Polarized relay
A polarized relay placed the armature between the poles of a permanent magnet to
increase sensitivity. Polarized relays were used in middle 20th Century telephone exchanges to
detect faint pulses and correct telegraphic distortion. The poles were on screws, so a technician
could first adjust them for maximum sensitivity and then apply a bias spring to set the critical
current that would operate the relay.
Machine tool relay
A machine tool relay is a type standardized for industrial control of machine tools,
transfer machines, and other sequential control. They are characterized by a large number of
contacts (sometimes extendable in the field) which are easily converted from normally-open to
normally-closed status, easily replaceable coils, and a form factor that allows compactly
installing many relays in a control panel. Although such relays once were the backbone of
automation in such industries as automobile assembly, the programmable logic controller (PLC)
mostly displaced the machine tool relay from sequential control applications.
Contactor relay
A contactor is a very heavy-duty relay used for switching electric motors and lighting
loads, although contactors are not generally called relays. Continuous current ratings for
common contactors range from 10 amps to several hundred amps. High-current contacts are
made with alloys containing silver. The unavoidable arcing causes the contacts to oxidize;
however, silver oxide is still a good conductor. Such devices are often used for motor starters. A
motor starter is a contactor with overload protection devices attached. The overload sensing
devices are a form of heat operated relay where a coil heats a bi-metal strip, or where a solder pot
melts, releasing a spring to operate auxiliary contacts. These auxiliary contacts are in series with
the coil. If the overload senses excess current in the load, the coil is de-energized. Contactor
relays can be extremely loud to operate, making them unfit for use where noise is a chief
concern.
Solid-state relay
Solid state relay, which has no moving parts
A solid state relay (SSR) is a solid state electronic component that provides a similar
function to an electromechanical relay but does not have any moving components, increasing
long-term reliability. With early SSR's, the tradeoff came from the fact that every transistor has a
small voltage drop across it. This voltage drop limited the amount of current a given SSR could
handle. As transistors improved, higher current SSR's, able to handle 100 to 1,200 Amperes,
have become commercially available. Compared to electromagnetic relays, they may be falsely
triggered by transients.
Solid state contactor relay
A solid state contactor is a heavy-duty solid state relay, including the necessary heat sink,
used for switching electric heaters, small electric motors and lighting loads; where frequent
on/off cycles are required. There are no moving parts to wear out and there is no contact bounce
due to vibration. They are activated by AC control signals or DC control signals
from Programmable logic controller (PLCs), PCs, Transistor-transistor logic (TTL) sources, or
other microprocessor and microcontroller controls.
Buchholz relay
A Buchholz relay is a safety device sensing the accumulation of gas in large oil-filled
transformers, which will alarm on slow accumulation of gas or shut down the transformer if gas
is produced rapidly in the transformer oil.
Forced-guided contacts relay
A forced-guided contacts relay has relay contacts that are mechanically linked together,
so that when the relay coil is energized or de-energized, all of the linked contacts move together.
If one set of contacts in the relay becomes immobilized, no other contact of the same relay will
be able to move. The function of forced-guided contacts is to enable the safety circuit to check
the status of the relay. Forced-guided contacts are also known as "positive-guided contacts",
"captive contacts", "locked contacts", or "safety relays".
Overload protection relay
Electric motors need overcurrent protection to prevent damage from over-loading the
motor, or to protect against short circuits in connecting cables or internal faults in the motor
windings. One type of electric motor overload protection relay is operated by a heating element
in series with the electric motor. The heat generated by the motor current heats a bimetallic
strip or melts solder, releasing a spring to operate contacts. Where the overload relay is exposed
to the same environment as the motor, a useful though crude compensation for motor ambient
temperature is provided.
Applications
Relays are used to and for:
Control a high-voltage circuit with a low-voltage signal, as in some types of modems or
audio amplifiers,
Control a high-current circuit with a low-current signal, as in the starter solenoid of
an automobile,
Detect and isolate faults on transmission and distribution lines by opening and closing circuit
breakers (protection relays),
A DPDT AC coil relay with "ice cube" packaging
Isolate the controlling circuit from the controlled circuit when the two are at different
potentials, for example when controlling a mains-powered device from a low-voltage switch.
The latter is often applied to control office lighting as the low voltage wires are easily
installed in partitions, which may be often moved as needs change. They may also be
controlled by room occupancy detectors in an effort to conserve energy,
Logic functions. For example, the Boolean AND function is realized by connecting normally
open relay contacts in series, the OR function by connecting normally open contacts in
parallel. The change-over or Form C contacts perform the XOR (exclusive or) function.
Similar functions for NAND and NOR are accomplished using normally closed contacts.
The Ladder programming language is often used for designing relay logic networks.
Early computing. Before vacuum tubes and transistors, relays were used as logical
elements in digital computers. See ARRA (computer), Harvard Mark II, Zuse Z2,
and Zuse Z3.
Safety-critical logic. Because relays are much more resistant than semiconductors to
nuclear radiation, they are widely used in safety-critical logic, such as the control panels
of radioactive waste-handling machinery.
Time delay functions. Relays can be modified to delay opening or delay closing a set of
contacts. A very short (a fraction of a second) delay would use a copper disk between the
armature and moving blade assembly. Current flowing in the disk maintains magnetic field
for a short time, lengthening release time. For a slightly longer (up to a minute) delay,
a dashpot is used. A dashpot is a piston filled with fluid that is allowed to escape slowly. The
time period can be varied by increasing or decreasing the flow rate. For longer time periods,
a mechanical clockwork timer is installed.
Relay application considerations
A large relay with two coils and many set of contacts used in an old telephone switching system.
Several 30-contact relays in "Connector" circuits in mid 20th century 1XB switch and5XB
switch telephone exchanges; cover removed on one
Selection of an appropriate relay for a particular application requires evaluation of many
different factors:
Number and type of contacts – normally open, normally closed, (double-throw)
Contact sequence – "Make before Break" or "Break before Make". For example, the old style
telephone exchanges required Make-before-break so that the connection didn't get dropped
while dialing the number.
Rating of contacts – small relays switch a few amperes, large contactors are rated for up to
3000 amperes, alternating or direct current
Voltage rating of contacts – typical control relays rated 300 VAC or 600 VAC, automotive
types to 50 VDC, special high-voltage relays to about 15 000 V
Coil voltage – machine-tool relays usually 24 VAC, 120 or 250 VAC, relays for switchgear
may have 125 V or 250 VDC coils, "sensitive" relays operate on a few milliamperes
Coil current
Package/enclosure – open, touch-safe, double-voltage for isolation between
circuits, explosion proof, outdoor, oil and splash resistant, washable for printed circuit board
assembly
Assembly – Some relays feature a sticker that keeps the enclosure sealed to allow PCB post
soldering cleaning, which is removed once assembly is complete.
Mounting – sockets, plug board, rail mount, panel mount, through-panel mount, enclosure for
mounting on walls or equipment
Switching time – where high speed is required
"Dry" contacts – when switching very low level signals, special contact materials may be
needed such as gold-plated contacts
Contact protection – suppress arcing in very inductive circuits
Coil protection – suppress the surge voltage produced when switching the coil current
Isolation between coil circuit and contacts
Aerospace or radiation-resistant testing, special quality assurance
Expected mechanical loads due to acceleration – some relays used in aerospace applications
are designed to function in shock loads of 50 g or more
Accessories such as timers, auxiliary contacts, pilot lamps, test buttons
CIRCUIT DIAGRAM OF THE SETUP
The RTD (resistance thermometer) is a temperature sensor which measures the
temperature in terms of resistance. The RTD is connected to the controller and the controller is
connected to a relay and the relay is connected to a bulb which is used (in this case) to see as an
output. The basic circuit diagram is shown above. The RTD acts as an input unit, the on/off
controller and the relay acts as controlling unit, the bulb acts as an output. The detailed
information of the temperature changes can also be verified on the controller while the bulb is
taken as brief output.
DESCRIPTION OF THE INTERNAL FUNCTIONING
A set point is given to the controller. Depending on the requirement the set values can be
2 or 3. As long as the temperature of the object we are measuring is within the set value the
controller keeps the circuit active. When the temperature exceeds the set value, the circuit is
inactivated. The RTD gives output in the form of resistance. The EMF is sent to the controller.
The EMF is transferred from RTD to the internal circuit of the controller via a transformer.
Inside the controller there two voltage generators, one is connected to the relay, while the other is
connected to the output of the controller. In general in industries, the output is given in form of
digital output directly displayed on the controller while the rest of the voltage is used to break the
circuit thus stopping the rise of temperature. As long as the temperature of the object remains
above the set point, the relay inside the controller remains activated. When the temperature of the
object drops below the set value, thus the EMF generated inside the RTD is stopped and thus the
temperature begins to rise as the circuit is closed. In our setup, the voltage which is sent as an
output is given to an external relay and in turn given to a bulb. When the temperature is above
the set value, the voltage generated closes external relay thus the bulb is switched on. When the
temperature drops, the bulb turns off.
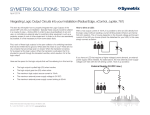
CIRCUIT CONNECTIONS GIVEN TO THE APPARATUS
On the controller there are points named as R, B, G. For thermocouples, the circuit is
taken as it is, while for RTD’s the B and G are short circuited and the connections are given.
There are points named N and P representing neutral and phase respectively. There are points
named NC (normally closed) and NO (normally open). The connections (phase and neutral) are
given to R and short circuited B, G. While the power supply for the setup is taken from source
which is given to neutral and phase of the controller. The external relay is connected to NC or
NO depending upon our choice of selection. The voltage source for the setup is in general taken
as 500 volts and above in industries but we take the general voltage given for domestic
applications i.e., 230 volts. The phase and neutral circuits are connected internally.
R
NC
B
G
P
N
NO
P
+
-
ON/OFF CONTROLLER CONNECTIONS
Once the connections are successfully established within the RTD and controller, the
output from the n/c port is connected to relay and in turn to the load. For simple demonstration
purpose, a bulb can be used for a load. Thus when the bulb is on, it shows an indication of
constant power supply within the circuit and the temperature still below the set point. When the
temperature exceeds the set point, the controller cuts the supply and the bulb is turned off
indicating us the temperature required having reached. A relay between the controller and load
can be used to regulate the supply.
Thus a temperature monitoring instrument is made by making effective use of the prior
mentioned instruments and the output coefficient has been successfully established
PRACTICAL APPLICATION OF THE CIRCUIT
Practically this circuit can be applied in boilers and ovens for the measurement of
temperature. Here RTD is used to measure the temperature of the boiler. This measured
temperature of the boiler, then this temperature is given as feedback to the controller. From the
other side manually set feedback is also given to the controller. The controller generates an error
based on this two readings. It uses this error to control the relay (i.e. turning the relay on or off),
this in turn switches the heater on/off. In this way the temperature of the heater is controlled.