Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
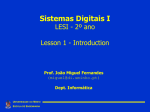
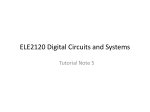
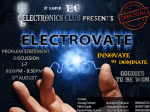
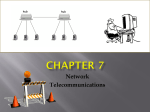
Topic: High Performance Data Acquisition Systems Analog Components: Multiplexed Systems Figure 1 High Performance Data Acquisition System Figure 1 shows a practical high performance data acquisition system using an analog multiplexer. Multiplexed systems have the significant advantage of accessing multiple sensor outputs while minimizing the number of expensive sample and hold and analog to digital convertors that would be necessary for multi-channel operations. Of course, the challenge is to time everything in such a way so that the multiplexer can acquire the signal from the sensor, switch channels, and then settle at the input of the sample and hold/analog to digital convertor unit to the required accuracy, BEFORE the sample is finalized (all of this must be fast enough to sample (inclusive of the required number of channels) for the desired system level performance). In the past, sampling speed limitations in the analog to digital convertor required designers to parallel multiple channels of ADC’s to sample the output of each sensor. Currently, there are available fast sampling analog to digital convertors that have high enough sample rates that when divided by the number of channels being acquired, can still give the desired overall throughput required in many high performance systems. Again, the multiplexer must be able to switch channels and the output signal must settle to the desired level (consistent with the allowable error within the error budget) AND to also be within the sample rate time interval of the sample and hold/analog to digital convertor AND to also be able to minimize “cross talk” between channels (channel to channel feed-through). Therefore, the multiplexer also introduces multiple errors within the budget. DC errors such as input offset (Rsource x Ibias(off)) and output offset (R(on) x (Id (on) + Ibias (s&h and/or adc)) are introduced. The dynamic errors of the multiplexer include cumulative time delay between multiplexer address signal and the settled output to the desired level at the S&H/ADC input(s) (see Figure 2), in addition to channel-to-channel feed-through errors. Care must also be taken when using multiplexers in terms of overall full scale linearity errors. The inherent linearity of the multiplexer can be limited at +/- full scale as the output approaches the multiplexer power supply rails. Also, dynamically changing input bias current conditions into the S&H/ADC (current glitches) can increase significantly and when multiplied by the multiplexer “Rd(on)” resistance (which can be varying non-linearly), and can cause huge problems especially in very high resolution (greater than 12 bit) systems. These errors, which can be significant (and be a limiting factor in overall performance), but these errors also manifest themselves significantly over temperature as well. Remember, a multiplexer is the perfect solution to eliminate a number of expensive parallel analog to digital convertors, but there are subtle performance errors, or changes in characteristics over time and temperature that can work significantly with either the input drive impedance and/or the output impedance it is required to drive. Figure 2 Typical Multiplexer Timing Another significant usage of a multiplexer in a high performance data acquisition system is in regards to system level calibration. If several multiplexer channels can be dedicated to drive stable reference voltages, than the overall data processing system can be continuously calibrated, effectively removing multiple system errors (including some that vary over temperature). Figure 3 Static Crosstalk As we stated previously, linearity errors within the multiplexer can be quite significant depending on the input and output loading of the device (both in required source and load resistance as well as required output voltage swing), but what can even be more troublesome in an analog multiplexer is crosstalk. Figure 3 shows how signals from one channel can be coupled into the other channel. Theoretically, Vout consists of Vin1 attenuated by the resistor divider (not including Rs1) formed by Rd1(on) and Rload. However, the capacitance of switch number two (C2) does couple some portion of Vin2. This is the simplest form of crosstalk which can often times be referred to as “static” crosstalk. In high frequency systems, a proportional amount of signal can easily be coupled through the “OFF” channel, so the designer can simply affect the static crosstalk level by simply choosing a smaller output load (Rload) that would then attenuate the fed-through signal. Of course this has negative effects in regards to increased current flow through the “ON” channel device and can increase static DC errors in the system as well. Figure 4 Dynamic Crosstalk “Dynamic” crosstalk is another issue in an analog multiplexer (see Figure 4). In normal operation, a multiplexer switches continuously between “ON” and “OFF”. In order to reduce crosstalk, multiplexers are designed to have break-before-make switching so that no two channels are addressed at the same time. This causes a non-linear dynamic loading change on the amplifiers driving the multiplexer as well as dynamically changing source impedance driving the sample and hold/analog to digital convertor. This make-before-break time interval, and subsequent dynamic settling time issues that negatively affect the multiplexer drive amplifiers, multiplexer, and sampling unit, can be quite significant, especially, when these issues couple between channels as the conditions change depending on the voltage levels at each channel input at the time of multiplexer addressing and ultimate output channel sampling. Of course the most confusing of all error signals in an analog multiplexer is “adjacent” channelto-channel crosstalk. This is can actually be the most dominate error component of the device. While both “static” and “dynamic” crosstalk are capacitive in nature (they vary with frequency at 6dB/octave), the “adjacent” channel crosstalk is invariant with frequency. The term “adjacent” refers to adjacent in time. Two channels are adjacent in time when one channel is sampled after the previous channel. This results in the information of the previous channel to be “carried forward” to the next channel (in time). This introduces a subtle “sampling” type error signal that is stored in the various capacitances in the multiplexer network base upon the previous multiplexer channel output. Adjacent channel crosstalk is a problem in every application where dynamic crosstalk must be considered, and it must be minimized. This can be accomplished by shorting the multiplexer output node to ground between address changes. This will require an additional analog switch. An alternative approach to reducing adjacent channel crosstalk is to ground every other channel in the multiplexer thereby standardizing the adjacent channel effects. Multiplexing multiple sensor outputs into a minimal number of sampling units (sample and hold/analog to digital convertors) reduces the complexity, expense and many different kinds of errors that negatively impact a high performance data acquisition system, but it also introduces other errors that can significantly limit overall performance. Also remember, PCB layout can be crucial in minimizing all of the error contributors that we have been discussing. Proper layout in regards to channel-to-channel isolation (and matching), together with power decoupling and grounding, will be critical to achieve overall desired circuit performance. Kai ge from CADEKA