Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Voltage optimisation wikipedia , lookup
Flip-flop (electronics) wikipedia , lookup
Buck converter wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Transmission line loudspeaker wikipedia , lookup
Mains electricity wikipedia , lookup
Solar micro-inverter wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Switched-mode power supply wikipedia , lookup
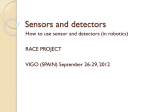
ALLEN-BRADLEY Encoder Driver Interface Module Instructions General The Encoder Driver Interface Module is a multi–purpose pulse amplifier primarily used for generating 15 milliampere, double ended, sink and source output signals. These signals are acceptable as inputs to digital reference and/or digital feedbacks into opto isolated circuits of Allen–Bradley drive products such as the Bulletin 1395, 1336 PLUS, 1336 FORCE and the 1399. The opto–isolated input signals are designed to guard against signal common loops and also to provide an improved signal to noise input circuit. Module Capabilities The Encoder Driver Interface Module has the capability of handling 2 independent quadrature encoder signals, with inputs designated as AI1 (TB1–1) and BI1 (TB1–2) for encoder 1 and AI2 (TB1–3) and BI2 (TB1–4) for encoder 2 (see Fig.1). These inputs are single ended, as they all are 0 to 5 volt signals referenced to module common (TB1–6 & TB1–8). Since the module inputs must be a maximum of 5 volt level, input resistive voltage dividers for example can be applied to reduce 12 volt encoder levels to the 5 volt level. If it is desirable to “Fan Out” one encoder that has double ended 0 to 15 milliampere levels, it is recommended that a burden resistor (330 ohms), be mounted near the module input (within 300 millimeters (1ft.)) for optimum noise immunity for each channel. The module outputs are all differential (or double ended), 0 to 5 volt signals. The module outputs all have the capability of continuously driving a total load of at least 45 milliamperes. Encoder 1 module outputs are denoted AO1 (TB2–1), & NAO1 (TB2–2) for the A Channel and BO1 (TB2–3) & NBO1 (TB2–4) for the B channel. In a similar manner, Encoder 2 module outputs are denoted AO2 (TB2–7) & NA02 (TB2–3) for the A channel and BO2 (TB2–9) & NBO1 (TB2–10) for the B channel. The Encoder Driver Module requires a DC power supply capable of 250 milliamperes minimum. The preferred input voltage is 12 volts, but the internal 5 volt regulator and heat sink in the module will accept up to a 24 volt input power supply. The Encoder Driver Module also has 4 terminals internally connected together which are dedicated for signal shield connections. These terminals are TB1–5, TB1–9, TB2–5 and TB2–6. Specifications Electrical Input Signal: Electrical Output Signal: Single ended; 0 to 5 volts; 0 to 50 Khz throughput frequency; Input impedance greater than 100 K ohms. Differential; 0 to 5 volts; 0 to 50 Khz throughput frequency; 45 milliamperes maximum per output. Instructions Encoder Driver Module Electrical Power Supply Input: 12 to 24 volts; 250 milliamperes minimum current dependent on # of outputs utilized. Environmental: Ambient temperature rating: 0 to 40° C (32 to 104°F) Relative Humidity: 5 to 95% non–condensing Altitude: 3300 feet (1000m) without derating Applications 1395 RTP DC Drive – The Encoder Driver Interface Module was originally developed for Goss, GSD applications using the Bulletin 1395 RTP DC drive (Fig. 1). In this application, both the encoder used for drive feedback, denoted Belt Speed Encoder, and the magnetic pickup, denoted Press Speed Pick–up, are routed to a console side panel designed by Goss. The signals are used for processing roll diameter information and for setting up roll transferring operations. The signals that are brought out of this CPTC panel for drive input are single ended, 0 to 5 volts in magnitude, with severely limited current capability similar to a TTL gate output. The Encoder Driver Interface Module is designed so that these voltage signals can be changed to the proper impedance levels for the 1395 RTP digital reference and digital feedback signals. In order for the module to provide an improvement in noise immunity, it is recommended that the module be physically located as close as possible to the voltage source of its input signals (300 millimeters (1ft.) or less). Belt Speed Encoder Feedback signals are connected as follows: 1. Encoder Channel A out of the RTP console (CPTC Board) is connected to the AI1 channel (TB1–2). 2. Encoder Channel B out of the RTP console is connected to the BI1 channel (TB1–1). 3. Module outputs described previously for encoder 1 are directly connected to the 1395 feedback encoder input terminals. Figure 1. 1395 RTP DC Drive Application Paster Panel CPTC Board Encoder Driver Interface Module TB2 1 2 3 4 5 6 7 8 9 10 TB1 1 A B 2 Belt Speed Encoder 300 PPR RTRN 6 SHD HI Press Speed Pickup RTRN SHD 12VDC 5 3 TB1 TB1 7 8 9 To Power Supply 2 To Drive Encoder Feedback Input RTP Adapter Press Speed Reference Input Instructions Encoder Driver Module Press Speed Pick–Up signals are connected as follows: 1. Only the channel A input is used, the HI signal is connected to AI2 channel (TB1–6). 2. Module outputs for the encoder 2 channel A output only are connected directly to the RTP digital ref adapter PC Board terminals. Quadrature Encoder/ Multiple Inputs – Figure 2 depicts one quadrature encoder (with 0 to 12 volt, 15 milliampere outputs) that will be used to provide digital reference signals for four different drive inputs. Note that in this application it is necessary to both provide burden resistors for the outputs of the 12 volt encoder as well as voltage dividers to bring the input signal level to a maximum of 5 volts. Figure 2. Encoder Driver Module Multiple Input Application Encoder Driver Interface Module Single Ended Input Connections A 500Ω/ _watt 330Ω/ _watt CHA TB2 AO1 1 30 mA NAO1 2 TB1 1 AI1 3 0 to 12V 6 AI2 30 mA Common A TB2 5 B 7 NAO2 8 AO2 To Drive 1 To Drive 2 To Drive 3 To Drive 4 5 6 Shield TB2 TB1 2 BI1 500Ω/ _watt Differential Output BO1 3 To Drive 1 NBO1 4 330Ω/ _watt CHB 4 BI2 9 NBO2 10 BO2 0 to 12V 8 Common B TB1 7 9 – To Drive 2 To Drive 3 To Drive 4 + Note: Input AI1 Drives AO1, NA01 Outputs Input BI1 Drives BO1, NB01 Outputs To 12 – 24 VDC, at 250 milliamps minimum Power Supply Output 3 Instructions Encoder Driver Module Quadrature Encoder/ Impedance Isolation – Figure 3 depicts a single quadrature encoder used for impedance isolation of the drive feedback input signal on an AC drive. In this case, the feedback input signal of a 1399 AC drive is isolated from other controllers using the same encoder signals, which are creating common loops resulting in noise interference with the feedback signals of the 1399 drive. Figure 3. Encoder Driver Module Impedance Isolation, 1399 Drive Encoder Driver Interface Module Encoder A Encoder B TB1 1 AI1 CH 1 Input 2 BI1 CH 1 Output TB1 5 TB Shields DRIVE SIDE BO1 3 NBO1 4 A A B To Switch Cabinet etc. B TB2 5 TB1 3 AI2 CH 2 Input (Not Used) 4 BI2 Encoder Power Supply Common TB2 AO1 1 NAO1 2 CH 2 Output (Not Used) 6 TB2 AO2 7 NAO2 8 BO2 9 NBO2 10 NOT USED Common TB1 Common 7 8 – + 12 VDC Power Supply, 250 milliamperes minimum Tools and Equipment 4 You will need the following equipment to successfully install the Encoder Driver Module: • A small flat blade screwdriver • A wire stripper • An electric drill • 2 mounting screws (8–32) and a tap • Cable, Alpha 2256 or equivalent Instructions Encoder Driver Module Mounting ! ! ATTENTION: The ED Module and Allen–Bradley AC & DC Drives all contain ESD (Electrostatic Discharge) sensitive parts and assemblies. Static control precautions are required when installing, testing, servicing or repairing this assembly. Component damage may result if ESD control procedures are not followed. If you are not familiar with static control procedures, reference A-B publication 8000-4.5.2, Guarding Against Electrostatic Damage or any other applicable ESD protection handbook. ATTENTION: Severe injury or death can result from electrical shock, burn, or unintended actuation of controlled equipment. Hazardous voltages may exist in the cabinet even with the circuit breaker in the off position. Multiple sources of power may be connected to the Drive. Recommended practice is to disconnect and lock out control equipment from all power sources and discharge stored energy in capacitors, if present. If it is necessary to work in the vicinity of energized equipment, the safety related work practices of NFPA 70E, Electrical Safety Requirements for Employee Workplaces, must be followed. DO NOT work alone on energized equipment! 1. Remove all power to the Drive. 2. The Encoder Driver Module is supplied with a mounting bracket for mounting in an appropriate enclosure outside the drive cabinet. It should be located as close to the reference device (encoder etc.) as possible. The module can be mounted in any orientation, but it must be isolated from vibration, temperatures outside the range of 0° to +40°C (32° to 104° F) and any contact with liquids, chemicals or volatile gas/dust. Connections 1. Terminal strip TB1 on the Encoder Driver Module is used for incoming reference signal and power supply terminations as shown in Figures 1 thru 3. Incoming signals from a reference device could be connected are shown in these examples. 2. You must provide power in the range of 12VDC to 24VDC to the Encoder Driver Board at TB1 Terminals 7 & 8. In 1395 applications, 12VDC can be obtained from terminals 13 & 14 of TB3 provided the total load is not greater than the capibility of the 12 volt supply. If 24VDC input power is desired it must be provided from a separate 24V power supply. The Encoder Driver Board has an internal regulator that automatically compensates, allowing it to operate with either power source. The module mounted heat sink will dissipate more power with the 24 volt supply input. 3. The Encoder Driver Board output signals originate at TB2. Use the examples in Figures 1 thru 3 as a reference when making output connections. 5 Instructions Encoder Driver Module 4. After all terminations have been made for your particular application, reapply Power to the Drive and check the Encoder Driver Interface Module for correct operation. Troubleshooting If the Encoder Driver Module does not seem to be operating properly check the following: 1. Check that all connections and cables are undamaged and are securely and correctly connected at the ED Module, the Digital Reference Adapter Board and the reference device. 2. Check that the ED Module has correctly rated DC power applied to it. ! ATTENTION: Potentially fatal voltages may result from improper useage of an oscilliscope or other test equipment. The oscilliscope chassis may be at a potentially fatal voltage if not properly grounded. If an oscilliscope is used to measure high voltage waveforms, use only a dual channel oscilliscope in the differential mode with X 100 probes. It is recommended that the oscilliscope be used in the A minus B Quasi–differential mode with the oscilliscope chassis correctly grounded to an earth ground. Refer to equipment safety instructions for all test equipment before using with the Encoder Driver Module or 1395 Drive. 3. Check the encoder for proper power supply connections & value of supply. 4. Check the encoder outputs as well as any interface electronics between the encoder and the output terminals to the module. 5. If encoder outputs and signal outputs are correct, check signal channel outputs for pulse train information with the encoder rotating. 6. For Quadrature encoder signals, use a dual trace oscilliscope with A minus B differential capability to look for the correct differential pulse train coming into the drive at the Digital Reference Adapter Board. If the correct pulse train is not present, the ED Module may be malfunctioning. 7. DO NOT attempt to open or repair a suspect Encoder Driver Module. Return the unit to an authorized Allen–Bradley service center for repair or replacement. 6 Instructions Encoder Driver Module Figure 5. Schematic Diagram Encoder Driver Interface Module D2 D4 +5V D1 TB1 Encoder #1 Input AI1 1 R1 2 AI2 3 4 R2 6 7 1A 9 8 R4 18 1Z 2A 15 15 3A 4A +5V 49.9 C7 0.01 2Y U1 75174 2Z 3Y 3Z 4 C9 0.01 4Y 12 C6 0.01 TB2 1Y 49.9 17 49.9 BI2 1 3 16 R3 Encoder #2 Input D3 15 49.9 BI1 16 VCC 4Z 8 C8 0.01 2 3 6 13 2 NAO1 3 BO1 4 NBO1 7 AO2 8 NAO2 9 B02 7 9 11 11 14 AO1 5 5 10 1 4 12 Encoder #1 Differential Outputs 13 14 10 Encoder #2 Differential Outputs NBO2 TB1 8 HS +12V Common +5V In 2 U2 Out +12V 1 6 7 MC7805 +12V PWR Input TB1 + 5 C1 10 C2 0.1 C3 0.1 C4 0.1 C5 0.1 9 TB2 Common Shield 5 0 6 +5V TB1 10 +5V Output NOTE: Unless otherwise specified: 1. All capacitors are in MFD 2. All Diodes are in 4148 3. Last Used: U2 R4 C9 D4 TB2 4. All Resistor Values are in Ohms 5. Maximum throughput frequency 50 Khz 7