Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Operational amplifier wikipedia , lookup
Electrical engineering wikipedia , lookup
Josephson voltage standard wikipedia , lookup
Mechanical filter wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Schmitt trigger wikipedia , lookup
Television standards conversion wikipedia , lookup
Coupon-eligible converter box wikipedia , lookup
Nanofluidic circuitry wikipedia , lookup
Electronic engineering wikipedia , lookup
Crossbar switch wikipedia , lookup
Power MOSFET wikipedia , lookup
Voltage regulator wikipedia , lookup
Current mirror wikipedia , lookup
Rectiverter wikipedia , lookup
Integrating ADC wikipedia , lookup
Surge protector wikipedia , lookup
Power electronics wikipedia , lookup
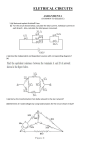
Analogous Non-Smooth Models of Mechanical and Electrical Systems Michael Möller and Christoph Glocker IMES - Center of Mechanics, ETH Zurich, 8092 Zurich, Switzerland [email protected], [email protected] Summary. The non-smooth modeling of mechanical and electrical systems allows for ideal unilateral contacts, sprag clutches and dry friction in mechanical systems and for ideal diodes and switches in electrical systems. The formulation of nonsmooth electrical models is demonstrated by the example of the DC-DC buck converter using the flux approach. The non-smooth electrical elements are described with set-valued branch relations in analogy with set-valued force laws in mechanics. With the set-valued branch relations, the dynamics of the circuit are described as measure differential inclusions. The measure differential inclusions obtained for the DC-DC buck converter are related to an analogous mechanical system. For the numerical solution, the measure differential inclusions are formulated as a measure complementarity system and discretised with a difference scheme, known in mechanics as time-stepping. For every time-step a linear complementarity problem is obtained. 1 Introduction The well developed formulations and methods used for non-smooth mechanical systems [5, 8, 9] can be adopted for electrical systems, by extending the classical electromechanical analogy to non-smooth systems. There are basically three approaches for the description of electrical systems, called the charge approach, the flux approach and mixed approaches [3]. The charge approach for electrical systems uses the charges and associated currents as variables while the voltages are balanced. In the flux approach the fluxes with associated voltages form the variables while balancing the currents. In mechanics usually the positions and their associated velocities are used as variables and the forces are balanced. The classical analogy links these approaches in mechanics and electronics. In Table 1 the corresponding variables and linear elements are shown for each approach. The duality between voltage u and current ı of an electrical system mirror the duality in mechanics between velocity v and force f . Table 1 is therefore completed with a column for the momentum approach, which is dual to the position approach in the same way as the Peter Eberhard (ed.), Multiscale Problems in Multibody System Contacts, 45–54. © 2007 Springer. Printed in the Netherlands. 46 Michael Möller and Christoph Glocker mechanics mechanics electronics electronics position app. momentum app. charge approach flux approach local variables position r velocity v force f momentum p force f velocity v charge g current ı voltage u flux ϕ voltage u current ı inertia mass m −f = mv̇ stiffness k −v = k1 f˙ inductivity L −u = Li capacity C −ı = C u̇ dissipation damping d −f = dv damping d −v = d1 f resistance R −u = Rı resistance R 1 −ı = R u energy storage stiffness k −f = kr mass m 1 −v = m p capacity C −u = C1 g inductivity L −ı = L1 ϕ Table 1. Corresponding variables and elements in mechanics and electronics. charge approach is dual to the flux approach. In [6], the idealized modeling of switches and diodes in the charge approach is introduced and linked to nonsmooth mechanics. In this paper the non-smooth modeling of ideal switches and diodes in the flux approach will be demonstrated by the example of the DC-DC buck converter. 2 DC-DC Buck Converter The DC-DC buck converter as shown in Fig. 1 is a circuit that allows for the Fig. 1. The DC-DC buck converter. efficient conversion of DC electrical power from the voltage u0 supplied by Analogous Non-Smooth Models of Mechanical and Electrical Systems 47 the voltage source to a lower voltage uR at the resistive load R. Besides the classical elements R, C, L and the voltage source u0 , the circuit consists of an ideal diode D and a unilateral switch S. The part of Fig. 1, which is drawn in grey, shows the switch control of the DC-DC buck converter, which controls the voltage at the load R by operating the unilateral switch S. 2.1 The Switch Control of the DC-DC Buck Converter The switch control of the DC-DC buck converter consist of an amplifier with gain K, a comparator and a ramp generator with period T , lower voltage ul and upper voltage uu (cf. Fig. 1). The output voltage a of the switch control is used to operate the unilateral switch S of the buck converter. With the output voltage ucomp of the amplifier ucomp = −K(uR + uref ) (1) and the explicitly time-dependent output voltage ug (t) of the ramp generator ! t − k (uu − ul ) ; kT ≤ t < (k + 1)T ; k = 0, 1, 2, ... (2) ug (t) = ul + T the voltage a at the comparator is set for modeling reasons as " 0, ucomp − ug (t) ≤ 0, a= +∞, ucomp − ug (t) > 0. (3) This relation can be simplified by eliminating ucomp yielding the following rule for the switch control " 0, −uR (t) ≤ h(t), 1 (4) h(t) := uref + ug (t). a= K +∞, −uR (t) > h(t), For a = 0 the switch is closed and behaves as an ideal diode, while the switch is perfectly isolating for a → +∞. 2.2 The Extended DC-DC Buck Converter The extended DC-DC buck converter has two additional capacitors C ∗ and C ◦ compared to the original DC-DC buck converter, in order to obtain a nonsingular matrix M of capacitances (cf. Fig. 2). This extension of the circuit is done to ease the analogy to mechanical systems, while the circuit of the original DC-DC buck converter can be obtained by setting the two additional capacities C ∗ and C ◦ to zero. In analogy with the force impulsion measure dF in mechanics, a current impulsion measure dI is introduced for the flux approach. The force impulsion measure dF consists of the Lebesgue-measurable forces 48 Michael Möller and Christoph Glocker Fig. 2. Electrical model of the extended DC-DC buck converter. f and the purely atomic impulsive forces F , while dI consists of Lebesguemeasurable currents ı and purely atomic impulsive currents I. dF = f dt + F dη, dI = ı dt + I dη. (5) In the flux approach the voltages u are assumed to be functions of bounded variation. Higher order discontinuities are out of the scope of this paper. A general method of classifying such discontinuities may be found in [1]. To describe the dynamics of the circuit, generalized voltages v and associated generalized fluxes q are introduced in analogy with generalized velocities u and generalized coordinates q in mechanics. The circuit of the extended DC-DC buck converter has four nodes, which have been shaded grey in Fig. 2. The voltages vi of each node with respect to the ground node are chosen as generalized voltages. The vector of nodal voltages v and the associated vector of nodal fluxes q become T T q := q1 , q2 , q3 , v := v1 , v2 , v3 , q̇ = v dt-almost everywhere, (6) for the extended DC-DC buck converter. All branch voltages ui satisfying Kirchhoff’s voltage law can be expressed as a linear combination of the nodal voltages vi , defining the nodal transformation of the circuit u0 = w T 0 v = v1 ⇒ wT 0 = (1, 0, 0) uC ∗ = w T ⇒ wT C ∗ v = v1 C ∗ = (1, 0, 0) T T uS = wS v = v2 − v1 ⇒ wS = (−1, 1, 0) uD = w T D v = v2 T uC = wC v = −v3 ⇒ wT D = (0, 1, 0) ⇒ wT C = (0, 0, −1) T uL = w T L v = v3 − v2 ⇒ w L = (0, −1, 1) uC ◦ = w T C ◦ v = v2 uR = w T R v = −v3 ⇒ wT C ◦ = (0, 1, 0) ⇒ wT R = (0, 0, −1). (7) Analogous Non-Smooth Models of Mechanical and Electrical Systems 49 The nodal transformation (7) holds also in integrated form for the branch fluxes ϕi = wT i q, as well as for the associated virtual flux displacements δϕi = wT δq. Kirchhoff’s current law is evaluated in terms of a virtual work i approach by demanding that the virtual action ddWδ has to vanish for arbitrary virtual branch flux displacements δϕadm that are admissible with the i constraints imposed by the topology of the circuit : 0 = dδW = dIi δϕadm . (8) ∀ δϕadm i i i The sum is taken over all elements of the system i ∈ {0, C ∗ , S, D, C, L, C ◦ , R}. With the admissible virtual branch flux displacements δϕadm = wT i i δq, obtained by transforming arbitrary virtual nodal flux displacements δq, the equation (8) can be further simplified, T dIi wT wi dIi , (9) ∀ δq : 0 = dδW = i δq = δq i i yielding the equilibrium conditions at the nodes wi dIi = 0. (10) i The branch relations of the capacitors, the resistor and the inductor are singlevalued dIC ∗ = −C ∗ duC ∗ , dIC = −CduC , dIC ◦ = −C ◦ duC ◦ , 1 1 ıR dt = − uR dt, ıL dt = − ϕL dt. R L (11) The branch relations for the capacitors are formulated on the level of measures to include impulsive currents in analogy with impulsive forces in mechanics. The branch relations of the diode, the switch and the voltage source are setvalued (12) where Upr denotes the unilateral primitive [6]. An ideal diode is an element through which the current may flow only in the positive direction. To prevent the current from flowing in the negative direction, an ideal diode can provide an unbounded voltage at zero current. This characteristic can be expressed with the inclusion −ı ∈ Upr(u) and is analogous to an unilateral kinematic constraint (sprag clutch) in mechanics −f ∈ Upr(v). The relation given in (12) for the diode and depicted in Fig. 3 is obtained after completion with an impact law. The unilateral switch is modeled as a series connection of 50 Michael Möller and Christoph Glocker Fig. 3. Characteristic of sprag clutches and diodes. a spark gap with break-through voltage a and a diode (cf. [6]). The unilateral switch is analogous to a series connection of a sprag clutch and a kinematic excitation with relative velocity a in the position-flux analogy. The unilateral switch can be operated using the break-through voltage, while it is closed for a = 0 and open for a → ∞. The characteristic given in (12) for the unilateral switch contains an impact law as well and is depicted in Fig. 4. The third set-valued element in (12) is the voltage source, which is analogous to a bilateral kinematic constraint in mechanics. Fig. 4. Characteristic of moving sprag clutches and unilateral switches. After inserting the single-valued branch relations (11) into (10), replacing all branch variables using the nodal transformation (7) and defining the matrices ∗ ◦ T T M := wC ∗ wT C ∗ C + w C ◦ w C ◦ C + w C w C C, (13) 1 1 , K := wL wT D := wR w T R L , R L Analogous Non-Smooth Models of Mechanical and Electrical Systems 51 one obtains the measure differential inclusions describing the dynamics of the DC-DC buck converter. The mechanical model associated with the extended DC-DC buck converter can be obtained from (14) using the position-flux analogy. The mechanical model is illustrated in Fig. 5. The model consists of three masses C ∗ , C ◦ and C corresponding to the three capacitors of the extended DC-DC buck converter. Since the position-flux analogy is used, the electrical circuit and the mechanical model have the same topology. The sprag clutch acting between the environment and the mass C ◦ is analogous to the diode and allows the mass C ◦ only move to the right. The masses C ∗ and C ◦ are interacting by the serial connection of a kinematic excitation with relative velocity −a and a sprag clutch, constituting the analog to the unilateral switch. The switch control of the DC-DC buck converter measures the velocity uR and provides the relative velocity −a. Fig. 5. Mechanical model associated with the extended DC-DC buck converter. 2.3 Numerical Integration A time-stepping method is used to solve the measure differential inclusions (14) describing the non-smooth dynamics of the circuit for the unknown nodal voltages v(t) and the associated nodal fluxes q(t). Time-stepping methods discretise directly the inclusion (14) over a time step ∆t. The problem of solving the measure differential inclusion (14) numerically, is formulated as follows: For the system (14), with given initial nodal charges q A and initial nodal voltages v A , q A := q(tA ), v A := v(tA ), (15) at the initial time tA , find nodal charges q E and nodal voltages v E , q E := q(tE ), v E := v(tE ), (16) 52 Michael Möller and Christoph Glocker at the time tE which approximate the exact solution. The time tE is the end of a chosen time interval [tA , tE ] with length ∆t := tE − tA . (17) The resulting algorithms are very robust and easy to implement, but have a limited accuracy, see e.g. [2, 7] for some versions of time stepping algorithms. There are different possibilities to treat smooth set valued elements - in this case the voltage source - for numerical integration. Beside state reduction and replacement with two unilateral constraints, the third possibility is to append the current of the voltage source branch to the vector of unknown voltages after discretisation. This approach, also known in electronics as modified nodal analysis, is used in the following for the extended DC-DC buck converter. In order to simplify the expressions, the notations ! dID dI := , W := wD w S (18) dIS are introduced. Using these notations the equality of measures in (14) may be written as M dv + Dvdt + Kqdt − W dI − w 0 dI0 = 0, (19) wT 0 v − u0 = 0, where the constraint of the voltage source has been added as an additional equation. The notations ! 0 T γ := W v + ŵ, ŵ := (20) a are introduced to formulate the measure inclusions of the ideal diode and the unilateral switch as complementarity conditions 0 γ + ⊥ dI 0, (21) allowing to set up the linear complementarity problem after discretisation. For non-smooth mechanical systems usually Moreau’s midpoint rule is used to discretise the measure differential inclusions. This rule consists of a trapezoidal rule for the positions and an Euler step for the velocities. For the discretisation of the DC-DC buck converter, an implicit Euler scheme is used, which does not require a regular capacitor matrix M . The integral of the equality of measures (19) over the time step ∆t is approximated as M (v E − v A ) + Dv E ∆t + Kq E ∆t − W∆I − w0 ∆I0 = 0, wT 0 v E − u0 = 0, (22) using end-point terms by applying an implicit Euler scheme. The relation between the nodal voltages v and the nodal fluxes q can be approximated using one implicit Euler step Analogous Non-Smooth Models of Mechanical and Electrical Systems q E = q A + v E ∆t. 53 (23) The complementarity conditions (21) are expressed in the discretised form 0 γ E ⊥ ∆I 0, (24) where the vector of local variables at the end-time tE , γ E = W T v E + ŵA , (25) is formed using the vector ŵ A at the beginning tA of the time step. This is done in order to avoid a nonlinear dependence on the unknown nodal voltages v E , which would lead to a nonlinear complementarity problem. By using the vector ŵA instead of ŵ E , a small time-delay of ∆t is inserted into the switch control feedback of the DC-DC buck converter, which seems reasonable from the modeling point of view as well. Elimination of the end-point nodal fluxes q E from the equations (22) with the help of equation (23) yields (M + D∆t + K∆t2 )v E − w0 ∆I0 − M v A + Kq A ∆t − W∆I = 0, − wT 0 v E + u0 = 0, (26) where the terms have already been regrouped for the unknown variables v E and ∆I0 . With the definition of the vectors and matrices ! ! vE M + D∆t + K∆t2 −w0 ν := , , M̂ := ∆I0 −wT 0 0 (27) ! ! M v A − Kq A ∆t W ĥ := , Ŵ := , −u0 0 the notation can be simplified yielding the mixed linear complementarity problem T M̂ ν − ĥ − Ŵ∆I = 0, γ E = Ŵ ν + ŵA , 0 γ E ⊥ ∆I 0. (28) If the matrix M̂ is regular then the vector ν can be eliminated from (28) resulting in the linear complementarity problem −1 T γ E = Ŵ M̂ y A T −1 ∆I + Ŵ M̂ ĥ + ŵ A , 0 γ E ⊥ ∆I 0 Ŵ x b (29) 0 y ⊥ x 0 in standard form. It has to be noted, that the matrix M̂ is regular not only for the extended DC-DC buck converter, but for the original version as well. After solving the linear complementarity problem (29) for the vectors γ E and ∆I, the vector ν can be calculated from the first equation in (28), yielding the end-point nodal voltages v E . The nodal fluxes q E can then be calculated with the help of (23). The numerical results obtained for the original DC-DC buck converter in a chaotic parameter regime, as published in [4, 6], are shown in Fig. 6 and agree with those given in the publications. 54 Michael Möller and Christoph Glocker Fig. 6. Phase space plot and comparator voltages of the DC-DC buck converter. 3 Conclusion Using the example of the DC-DC buck converter the formulation of the measure differential inclusions, their relation to an analogous mechanical model and their solution using the time-stepping method has been shown for the flux approach. Only a small set of non-smooth elements have been described in this paper to show the basic procedure, but the formulations used are not limited to this set of elements only. References 1. Acary, V., Brogliato, B. Numerical time integration of higher order dynamical systems with state constraints. In ENOC-2005, 2005. 2. Anitescu, M., Potra, F.A., Stewart, D.E. Time-stepping for three-dimensional rigid body dynamics. Comp. Meth. Appl. Mech. Eng., 177(3):183–197, 1999. 3. Enge, O., Maißer, P. Modelling Electromechanical Systems with Electrical Switching Components Using the Linear Complementarity Problem. Multibody System Dynamics, 13(4):421–445, 2005. 4. Fosas, E., Olivar, G. Study of Chaos in the Buck Converter. IEEE Transactions on Circuits and Systems-I: Fundamental Theory and Appl., 43(1):13–25, 1996. 5. Glocker, Ch. Set-Valued Force Laws: Dynamics of Non-Smooth Systems, volume 1 of Lecture Notes in Applied Mechanics. Springer, Berlin, 2001. 6. Glocker, Ch. Models of non-smooth switches in electrical systems. International Journal of Circuit Theory and Applications, 33:205–234, 2005. 7. Jean, M. The non-smooth contact dynamics method. Computer Methods in Applied Mechanics and Engineering, 177:235–257, 1999. 8. Moreau, J.J. Unilateral contact and dry friction in finite freedom dynamics, volume 302 of CISM Courses and Lectures. Springer Verlag, Wien, 1988. 9. Pfeiffer F., Glocker, Ch. Multibody Dynamics with Unilateral Contacts. Wiley, New York, 1996.