Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
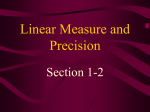
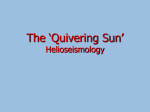
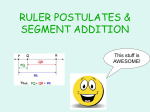
The GMT active optics control strategies R. Conana , A. Boucheza , F. Quiros–Pachecoa , B. McLeodb , and D. Ashbya a b GMTO, 465 N. Halstead Avenue, Pasadana, CA Harvard Smithsonian Center for Astrophysics, 60 Garden St., Cambridge, MA ABSTRACT The Giant Magellan Telescope (GMT) has a Gregorian 25.4-meter diameter primary mirror composed of seven 8.4-meter diameter segments. The secondary mirror consists of seven 1.1-meter diameter segments. In the active and adaptive operation modes of the GMT, around a dozen wavefront sensors are selectively used to monitor the optical aberrations across the focal plane. A dedicated wavefront control system drives slow and fast corrections at the M1 and M2 mirrors to deliver image quality optimized for the field of view of the scientific instrument in use. This paper describes the control strategies for the active optics mode of the GMT. Different wavefront estimation algorithm are compared and the performance of the GMT is evaluated using the Dynamic Optical Simulation package. 1. INTRODUCTION 3 The Giant Magellan Telescope (GMT) is 25.4m diameter aplanatic gregorian telescope. It is doubly segmented meaning that both M1 and M2 are made of 7 circular segments. M1 segments are 8.4m in diameter and M2 segments are geometrically matched to M1 segment with a diameter of 1.1m. The primary focus of the GMT is located below M2 and the gregorian focus is below the M1 center segment where a science instrument can be inserted. A third flat mirror (M3) can be deployed to fold the gregorian focus toward a suite of science instruments arranged on a rotating platform below M1, the gregorian instrument rotator (GIR). Below the GIR sits the acquisition, guiding and wavefront sensing system2 (AGWS). The AGWS is a set of 4 deployable probes picking up guide stars up to 10’ off–axis. The guide stars light is split between a high–order Shack–Hartmann WFS, a segment image stacker, a phasing camera and an acquisition and guiding camera. Each M1 segment has 6 hard–point actuators to adjust the segment orientation and 165 actuators to control the segment figure. M2 comes in two flavors: (i) 7 fast steering mirrors (FSM) with 200Hz tip–tilt corrections capability and (ii) 7 adaptive secondary mirrors (ASM) with 672 actuators each with a 1kHz update rate. The different telescope operating modes fall into two main categories: natural seeing and adaptive optics modes. The FSMs are used only with the natural seeing mode whereas the ASMs can be used for either mode. In the following, we will be focusing mainly on the control of M1 and M2 segment in the natural seeing mode with the AGWS and the FSM. Section 2 discusses the observable modes of the system in the natural seeing mode. The system model is described in Section 3 and in Section 4, the performance of the AGWS system is presented. Section 5 evaluates the effect of detector and atmospheric noise of the performance of the system. 2. OBSERVABLE MODES Each M1/M2 segment pair is forming one image and a GMT image is obtained by stacking coherently the 7 images of the 7 segment pairs. The optical aberrations in each image are corrected by adjusting the orientation of both M1 and M2 segments and by deforming M1 segments. The controlled modes are rigid body translations (Tx ,Ty ,Tz ) and rotations (Rx ,Ry ,Rz ) for both M1 and M2 segments and the bending modes of M1. Table 1 shows the wavefront distortions associated with the 6 rigid body transformations. A rotation around the z–axis (Rz ) of the center segment of both M1 and M2 has no effect on the wavefront aberrations. These modes can then be safely ignored for the center segments. A translation along the z-axis (Tz ) of the center segment Further author information: (Send correspondence to R. Conan) R. Conan: E-mail: [email protected], Telephone: +1 626 204 0507 Adaptive Optics Systems V, edited by Enrico Marchetti, Laird M. Close, Jean-Pierre Véran, Proc. of SPIE Vol. 9909, 99091T © 2016 SPIE · CCC code: 0277-786X/16/$18 · doi: 10.1117/12.2231578 Proc. of SPIE Vol. 9909 99091T-1 Downloaded From: http://proceedings.spiedigitallibrary.org/ on 02/01/2017 Terms of Use: http://spiedigitallibrary.org/ss/termsofuse.aspx Tx Ty Tz Rx Ry `1 Rz Oi if : M1 AP. 11 M2 Table 1. Wavefront distortions associated to the 6 rigid body transformations of each segment for both M1 and M2. of either M1 or M2 will introduce a piston and a plate scale (focus) error. However, either center segment can compensate the error, so we will pin M1 center segment to the origin of the z–axis by not controlling Tz for this segment. The total number of controlled rigid body transformations are 6 × 12 for the outer segments, 4 for M1 center segment and 5 for M2 center segment leading to a total of 81 rigid body modes. The first 36 M1 bending modes are depicted in Fig. 1. The bending modes correspond to the piston and tip–tilt free eigen modes of an outer segment. Using a finite element model of a M1 segment, the deformation of the segment is computed when one actuator is poked while the stress on the segment is minimized with the other actuators. The singular value decomposition applied to the set of segment deformations (one per actuator) gives the segment eigen modes. Piston, tip and tilt are projected out of these eigen modes which are then re– normalized to give the final eigen modes of an M1 segment. Zernike polynomials5 and disk harmonics4, 8 circular modes have been compared to M1 bending modes. Fig. 2 shows the fitting error for both modal basis. As the aberrations of most optical systems are low order, only the first 45 bending modes will be controlled. Fig. 2 shows that Zernike polynomials provides the best fit of the first 50 bending modes, consequently we will use the Zernike basis in our models. Table 2 summarizes the system observables in terms of wavefront aberrations and the corresponding M1/M2 segment modes that contributes the most to the observables. It is obvious that with a single wavefront sensor (WFS), one cannot control all M1/M2 segment modes and minimize the wavefront error at the same time. In Z0'0 STO0 T00 500-0 So0-0- i00STO*o- ZO-O- Figure 1. M1 bending modes. Proc. of SPIE Vol. 9909 99091T-2 Downloaded From: http://proceedings.spiedigitallibrary.org/ on 02/01/2017 Terms of Use: http://spiedigitallibrary.org/ss/termsofuse.aspx 1.2 1 Bending Modes Zernike fit error Disk harmonics fit error 0.8 ó L_ w` of 0.6 E LL 0.4 0.2 0 0 20 40 60 80 100 120 140 160 Bending modes Figure 2. M1 bending modes fitting error with Zernike polynomials and disk harmonics as a function of mode order. Observables tip and tilt piston, focus astigmatism higher orders M1/M2 segments mode Tx , Ty , Rx , Ry Tz , Zernike mode Rz , Zernike mode Zernike modes Table 2. GMT observable modes. Section 4, we will show that a subset of M1/M2 segment modes is enough to minimize the wavefront error. 3. SYSTEM MODEL The GMT and AGWS system is modeled with the Cuda–Engined Optics (CEO) simulator.6 CEO computes the optical paths of rays through the telescope that bounces off M1 and M2 segments up to the GMT exit pupil. In the exit pupil, the optical path differences of the rays are converted into the phase of the wavefront. Then a Fourier propagation is performed to either the focal or pupil plane of a sensor. CEO implements the 6 rigid body motion transformations of each segment of M1 and M2 and uses Zernike polynomials to shape the segments. The coordinate systems in which the transformation are defined are shown in Fig. 3. GMT’s Shack–Hartmann and pyramid wavefront sensors, segment piston sensor and edge-sensors are all modeled in CEO. CEO can import a Zemax optical prescription and convert it into its own optical system description. CEO can also be integrated with Simulink using custom Simulink block and the Zeromq message passing library. CEO has two application program interfaces (API): a low level API written in C++/CUDA and a high level (API) for Python written with Cython. Fig. 4 describes the CEO design with the relationships between all CEO C++ structures and Python classes. In the following, the AGWS is modeled with up to 3 probes, each pointing towards a guide star 8’ off–axis; the guide stars are evenly arranged on a ring. Each Shack–Hartman WFS is a 30 × 30 lenslet array measuring the geometric centroid i.e. the lenslet–average of the finite difference of the phase of the wavefront. 4. CONTROL In the natural seeing mode of the GMT, the AGWS drives M1 and M2 segments such that the segment position and figure errors do not degrade the point–spread–function (PSF) of the telescope. The PSF degradation is measured with respect to the PSF with ideal segments. The comparison between PSFs is given in terms of the size of the 80% ensquared energy patch (EE80). Fig. 5 compares the telescope wavefront error (WFE) for an on–axis guide star and the 8’ off–axis guide star. In both cases, on and off axis, the segments are at their Proc. of SPIE Vol. 9909 99091T-3 Downloaded From: http://proceedings.spiedigitallibrary.org/ on 02/01/2017 Terms of Use: http://spiedigitallibrary.org/ss/termsofuse.aspx M1 ȳ ŷ 1 M2 ȳ ȳ ŷ ŷ 6 ŷ 2 x̂ ŷ 7 ŷ z̄ ẑ x̄ x̂ 7 z̄ ẑ x̂ 2 x̂ ŷ ŷ ẑ ŷ ŷ x̄ 6 ŷ x̂ ẑ ŷ ŷ x̂ 1 x̂ ŷ 5 x̂ ŷ x̂ 3 4 ŷ x̂ 3 ŷ ŷ x̂ 5 x̂ ŷ 4 ẑ x̂ ẑ ȳ x̂ ŷ Figure 3. M1 and M1 rigid body transformations coordinate systems. nominal location and without any aberrations. The reference slopes of the WFS are set to cancel the telescope field aberration. The diffraction limited PSF is also shown in Fig. 5. The EE80 for the diffraction limited PSF is 28mas. The interaction matrices for all the controlled mode of M1 and M2 (Sec. 2) have been computed. Fig. 6 shows the eigen values corresponding to different calibration matrices. In the top–left are the eigen values of the calibration matrix of Rx , Ry and Rz for all the segments (Rz has been removed for the center segment of M1 and M2). The 14 first eigen values correspond to tip and tilt aberrations, followed by 6 weaker eigen values that are associated to astigmatism, the other modes are degenerated ones. The top–right graph is a plot of the eigen values of the concatenated matrix of the former calibration matrix with the calibration matrix of Tx , Ty and Tz for all the segments. One can recognize the 14 tip–tilt modes as a combination of Rx , Ry , Tx and Ty , followed by the 7 focus modes associated to the Tz motions and the 6 Rz astigmatisms. The bottom graph corresponds to the eigen values of the calibration matrix resulting of the concatenation of the former calibration matrix with the calibration matrix of the Zernike modes. The shape of each M1 segment is controlled with 42 Zernike modes from focus (mode #4) to mode #45 leading to a total of 294 modes for M1. Out of the 42 Zernike modes per segment, focus and x–axis astigmatism are combined with similar modes from the rigid body motions, leading to 40 ”controllable modes” per segment. Combined with the 27 unique rigid body modes, we obtain 307 unique eigen modes for the M1/M2 system as seen in Fig. 6. The command matrix of the system is derived from the truncated singular value decomposition of the former calibration matrix. All the modes with eigen values smaller than the eigen value #307 are discarded. The system is initially perturbed by applying random errors to all the degrees of freedom. The random errors are drawn from a normal distribution. The standard deviations of the errors are summarized in Table 3. They M1 M2 Tx,y [µm] 75 75 Tz [µm] 160 (0 on segment #7) 170 Rx,y [arcsec] 0.38 3.00 Rz [arcsec] 40 330 Zernike[µm] (radial order)−1 N.A. Table 3. Standard deviations of M1 and M2 initial perturbations. correspond to the required accuracy of the telescope metrology system. The first correction is applied with the segment image stacker by canceling segment tip and tip with M2 Rx and Ry motions. Then the loop is closed between all the segment actuators and the SH–WFS until steady state is reached. Proc. of SPIE Vol. 9909 99091T-4 Downloaded From: http://proceedings.spiedigitallibrary.org/ on 02/01/2017 Terms of Use: http://spiedigitallibrary.org/ss/termsofuse.aspx -- C ++ structure embed r Cython lasa embed oCython class inherit ®. -tats gmtMurors utilities ® ® centroiding Figure 4. CEO C++ structures (ellipses) and Python classes (rounded boxes) connections. Solid lines links C++ structure whereas dash lines connects Python classes. Proc. of SPIE Vol. 9909 99091T-5 Downloaded From: http://proceedings.spiedigitallibrary.org/ on 02/01/2017 Terms of Use: http://spiedigitallibrary.org/ss/termsofuse.aspx o o 0.75 loo 6000 0.50 100 100 4000 0.25 50 000 200 E o 2000 200 - 0.25 - 0.50 300 -50 o 300 -2000 - 0.75 -4000 -100 -1.00 400 -100 -50 0 50 400 -6000 -1.25 100 X-axis [mas] o 100 200 300 400 o 200 100 400 300 Figure 5. Telescope diffraction limited PSF (left), on–axis telescope WFE (middle) and 8’ off-axis telescope WFE (right). WFE units are nanometers. First, a single, 8’ off–axis, guide star is used to control the orientations and aberrations of M1 and M2 segments. A steady state PSF, WFE and segment piston removed WFE is shown in Fig. 10 (i). Segment pistons are the dominant sources of wavefront error because the WFS is not sensitive to piston. The on–axis EE80 for that particular example is 103mas. The experiment was repeated 100 times with refreshed random draws each time. The histogram of the EE80 of the 100 PSFs is plotted in Fig. 7. The histogram is fitted with a normal distribution with a 121ms mean and 31mas standard deviation. Fig. 10 (ii) shows a steady state PSF and WFE for an on–axis guide star. The dominant error is still the piston error, but compared to the off–axis guide star case, this is now the sole error. The mean EE80 across the 100 steady state PSF is 30mas with a 1mas standard deviation. Fig. 10 (iii) shows a steady state PSF and WFE for 3 guide stars on a ring of 8 arcminute radius. The mean EE80 across the 100 steady state PSF is 30mas. The single off–axis guide star case has more aberrations because the initial perturbations of the segments »«r vow OSwíw.yyM 5 10 15 (a) 20 25 30 10 35 30 40 60 50 70 80 Eigen modes 102 10' 101 102 10° 10' 10'' 10° 104 -'° 20 (b) Eigen modes v 103 v 104 103 10° 10"7 103 10'' (c) 50 100 150 200 Eigen modes 250 300 350 400 50 (d) 100 150 200 250 300 350 400 Eigen modes Figure 6. Calibration matrices for a single star on–axis (a, b and c) and for 3 guide stars at 8’ (d). The red dot indicates the first eigen mode to be truncated. Proc. of SPIE Vol. 9909 99091T-6 Downloaded From: http://proceedings.spiedigitallibrary.org/ on 02/01/2017 Terms of Use: http://spiedigitallibrary.org/ss/termsofuse.aspx 0.016 0.014 0.012 0.010 T V C j 0.008 g °- 0.006 0.004 0.002 Figure 7. EE80 histogram for 1 guide star off–axis at 8 arc–minute. induces additional field aberrations. The segments are driven to cancel any aberrations on the off–axis SH–WFS. Non–common path aberration between the on–axis and off–axis optical paths are then transfer from off–axis to on–axis, hence further degrading the on–axis PSF. The command matrices are derived from the truncated singular value decomposition of the interaction matrix shown in Fig. 6(c) for a single guide star and Fig. 6(d) for 3 guide stars. The truncation occurs at mode #307 for a single guide star and adding more eigen modes renders the system unstable. The residual WFE in the field is given in Fig. 8. This is the WFE after removing segment piston and telescope field aberrations. For 3 guide stars and with the same truncation than for 1 guide star, the performance on–axis is slightly degraded compared to 1 guide star whereas the performance off–axis is similar. However with 3 guide stars, more eigen modes can be included into the command matrix, up to mode #342, and the WFE is minimized across the whole field. Fig. 9 shows the coefficients associated to the propagation of the noise into the system for an on–axis guide star (left graph) and for 3 guide stars at 8’ (right graph). The coefficients q are given by q = diag M M T , (1) where M is the command matrix of the system: M = V (S ∗ )−1 U T . (2) The matrices U , S and V are derived from the singular value decomposition of the calibration matrix D, e.g. D = U SV T . (3) S ∗ is the truncated version of S given by (S ∗ )−1 ii = S −1 ii ∀i < N, = 0, otherwise. (4) (5) The first 80 coefficients corresponds to the rigid body motions, the others are related to the Zernike modes of M1 segments. As expected,7 the Zernike coefficients decrease with the Zernike orders. For the rigid body motions, the largest coefficients correspond to Rx and Ry motions following by Tx and Ty motions of M1 and M2 segments. Depending on the value of N , the system transitions from an optimal and stable state to an unstable state when one of the Rx or Ry mode is lifted up to the level of the coefficients associated to a command matrix that is not truncated. Proc. of SPIE Vol. 9909 99091T-7 Downloaded From: http://proceedings.spiedigitallibrary.org/ on 02/01/2017 Terms of Use: http://spiedigitallibrary.org/ss/termsofuse.aspx loi 102 w -- 1 on-axis GS 3 GSs at 8' (Trunc. @307) 101 -- 3 GSs at 8' (Trunc. @342) 10° 10-1 0 3 4 5 Field angle[arcmin] 2 1 6 7 Figure 8. WFE versus field for 1 guide star on-axis and 3 guide stars at 8 arc–minute. 5. NOISE PROPAGATION 5.1 Detector noise Photon noise and readout noise were added to the centroids of the SH–WFSs. The variance of the centroids corresponding to photon noise and read–out noise are respectively given by1 2 λ 1 σc2x,y = , and (6) r0 8 log(2)Nph 2 4 Npx pσron σc2x,y = . (7) Nph 12 λ = 640nm is the wavelength, r0 = 15cm is the Fried parameter, p = 0.38” is the detector pixel scale, σron = 0.5e− is the detector read–out noise, Npx = 8 is the number of pixel per lenslet and Nph is the number of photon per lenslet per frame given by: Nph = Qd2 T (10.87 × 109 )10−0.4MR , (8) where Q = 0.25 is the system optical throughput, d = 87cm is the lenslet size projected om M1, T is the exposure time and MR is the guide star magnitude. The constant 10.87 × 109 is the number of photon in m−2 .s−1 at magnitude 0. Fig. 11 (blue curve) plots the EE80 as a function of guide star magnitudes for the case of 3 guide stars at 8’ (Fig. 10 (iv)). For each magnitude, the experiment was repeated 100 times. The closed–loop integrator 1017 1012 X X Truncation @307 + + Truncation @308 No truncation 1011 1o' 1011 1011 1o' 108 10' 109 101 10° .F4..$.... + 10 10' 10' .4 : J 03 103 102 101 ( 101 Y 10.1 1 103 10' 1o.7 Truncation @343 + Truncation @344 No truncation 1010 NE++ 10-90 41C, 50 100 150 300 200 250 Ml & M2 rigid body and Zernike modes 350 400 10° 101 103 103 104 50 100 150 200 250 300 Ml & M2 rigid body and Zemike modes Figure 9. Noise propagation coefficients for 1 guide star on–axis (left) and for 3 guide stars at 8’. Proc. of SPIE Vol. 9909 99091T-8 Downloaded From: http://proceedings.spiedigitallibrary.org/ on 02/01/2017 Terms of Use: http://spiedigitallibrary.org/ss/termsofuse.aspx 350 400 PSF WFE Segment Piston Free 0 I 100 12 730 En0 100 50 (i) 1 GS at 8’, hEE80i = 121mas 0 as 100 -04 430 m 300 200 0 o-0 200 -0.4 150 -50 300 0 400 I -300 - -0.8 300 - -150 -100 -1.2 400 -1.6 -450 -100 -50 0 50 -2.0 100 loo 0 X-axis [mas] 200 300 400 0 0 I ioo 100 200 300 400 0 0.0016 150 100 0.0012 100 o so 00008 (ii) 1 GS on–axis, hEE80i = 30mas ''' -150 200 o - 00004 -300 -so 300 -100 400 -100 -50 0 50 X-axis [mas] - -450 I 0.0000 300 -0.0004 -600 400 -0.0008 -750 ioo 100 0 200 300 -0.0012 400 0 0 100 200 300 400 0 ioo 1120 so 100 so (iii) 3 GSs at 8’, hEE80i = 30mas 200 I000iz 100 0 0008 ao ''' o 200 o 0 0004 200 -40 -so 300 -100 400 0 0000 300 - -0.0004 -12C -100 -50 0 50 X-axis [mas] -.0 I-0.0008 400 -0.00iz ioo 100 o 200 30C 40, 0 100 200 300 400 Figure 10. Steady state PSF (left) and WFE (middle) and segment piston free WFE (right) in microns (see text for details). 65 {--4 w/o atm. (10s) 60 #-1 w/ atm. (10s) 55 - f--4 w/ atm. (55) 50 0 w 45 40 35 30 28 25 14 15 16 17 18 20 R magnitude Figure 11. EE80 versus R magnitude for 3 guide stars at 8’. was using a gain of 0.5 and 20 iterations. The on–axis PSF was integrated after the 10th iteration. The EE80 was computed from the integrated PSF. In Fig. 11, the dots and the error bars correspond to the mean and to two standard deviations, respectively, of the 100 EE80 sample for each magnitude. The thick solid black line corresponds to the EE80 requirement imposed by the image quality requirements for the natural seeing operation mode of the GMT. The red dash line indicates the lower limit of the EEE80 for 3 GSs and without noise. Proc. of SPIE Vol. 9909 99091T-9 Downloaded From: http://proceedings.spiedigitallibrary.org/ on 02/01/2017 Terms of Use: http://spiedigitallibrary.org/ss/termsofuse.aspx 0.016 0.014 0.012 0.010 it 0.006 0.004 0.002 0.000 -300 -200 -100 0 100 200 300 centroids [mas] Figure 12. Atmosphere centroid error distributions for 3 WFS exposure time: 1s, 5s and 10s. 5.2 Atmosphere The distribution of WFS centroid errors due to the atmospheric turbulence is plotted in Fig. 12 for different detector exposure time. The centroid distribution is build–up by modeling the propagation of the light through atmosphere phase screens and forming an image of a square subaperture of size d = 87cm. The images are sampled at 5ms and integrated for T=1s, 5s or 10s. The centroids of the images are accumulated over a time period of 5mn. The standard deviation of the centroid errors are 83mas, 38mas and 28mas for T=1s, 5s and 10s, respectively. The variance of the atmosphere centroid errors were added in quadrature to the variance of the SH-WFSs photon and read–out noise errors. The resulting EE80 for exposure times of 5s and 10s has been added to Fig. 11. The EE80 increases when the exposure time decreases because of both the larger atmosphere error and the reduced number of photons. 6. CONCLUSION We have reviewed the control of the AGWS system of the GMT in the natural seeing mode of operation of the telescope. We have shown how the number of observables is limited and how the singular value decomposition of the observable allows to select a subset of controllable modes. Using these modes, 3 guides stars are required to reduce the EE80 to a level compatible with AGWS performance requirements. Three guide stars are also necessary to maintain the same level of performance across the whole field. The propagation of atmosphere and detector noise in the system have been evaluated. The performance requirements are met with WFS exposure time down to 5s for guide star magnitude up to 20 in R band. Further work will include the confirmation of these results using a full end–to–end model with a fast M2 tip–tilt loop and with additional error sources like wind buffeting jitters. REFERENCES [1] J.M. Beckers, P. Lena, O. Lai, P.Y. Madec, G. Rousset, M. Sechaud, M.J. Northcott, F. Roddier, J.L. Beuzit, F. Rigaut, and D.G. Sandler. Adaptive Optics in Astronomy. Cambridge University Press, 1999. [2] B. McLeod et al. The GMT active optics system: design and simulated end-to-end performance. Proceedings of SPIE, 9906, 2016. [3] P. McCarthy et al. Scientific Promise and Status of the Giant Magellan Telescope Project. In Adaptive Optics for Extremely Large Telescopes III, May 2013. Proc. of SPIE Vol. 9909 99091T-10 Downloaded From: http://proceedings.spiedigitallibrary.org/ on 02/01/2017 Terms of Use: http://spiedigitallibrary.org/ss/termsofuse.aspx [4] Norman Mark Milton and Michael Lloyd-Hart. Disk harmonic functions for adaptive optics simulations. In Adaptive Optics: Analysis and Methods/Computational Optical Sensing and Imaging/Information Photonics/Signal Recovery and Synthesis Topical Meetings on CD-ROM, page AWA3. Optical Society of America, 2005. [5] R.J. Noll. Zernike polynomials and atmospheric turbulence. J. Opt. Soc. Am., 66(3):207–211, March 1976. [6] F. Quiros-Pacheco R. Conan, A. Bouchez and B. McLeod. The GMT Dynamic Optical Simulation. In Adaptive Optics for Extremely Large Telescopes, 2015. [7] F. Rigaut and E. Gendron. Laser guide star in adaptive optics : The tilt determination problem. Astron. Astrophys., 261:677–684, 1992. [8] Steven C. Verrall and Ramakrishna Kakarala. Disk-harmonic coefficients for invariant pattern recognition. J. Opt. Soc. Am. A, 15(2):389–401, Feb 1998. Proc. of SPIE Vol. 9909 99091T-11 Downloaded From: http://proceedings.spiedigitallibrary.org/ on 02/01/2017 Terms of Use: http://spiedigitallibrary.org/ss/termsofuse.aspx