Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
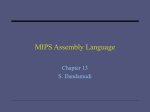
Basic Computer Organization Chapter 2 S. Dandamudi Outline • Basic components • The processor – Execution cycle – System clock • Flow control – Branching – Procedure calls • Memory – Basic operations – Types of memory – Storing multibyte data • Number of addresses – – – – – 3-address machines 2-address machines 1-address machines 0-address machines Load/store architecture • Input/Output • Performance: Data alignment 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 2 Basic Components • Basic components of a computer system – Processor – Memory – I/O – System bus • Address bus • Data bus • Control bus 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 3 Basic Components (cont’d) 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 4 The Processor • Processor can be thought of executing – Fetch-decode-execute cycle forever • Fetch an instruction from the memory • Decode the instruction – Find out what the operation is • Execute the instruction – Perform the specified operation 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 5 Infinite Cycle Instruction Execute Cycle Instruction Fetch Instruction Decode Operand Fetch Execute Writeback Result Obtain instruction from program storage Determine required actions and instruction size Locate and obtain operand data Compute result value and status Deposit results in storage for later use Instruction Execution Cycle – cont'd I1 memory op1 op2 program I2 I3 I4 fetch ... read registers registers write write I1 decode • Instruction Fetch • Instruction Decode • Operand Fetch • Execute • Result Writeback PC flags ALU execute (output) instruction register The Processor (cont’d) • System clock – Provides timing signal to synchronize the operations of the system. 1 – Clock period = Clock frequency (instruction execution time) 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 8 Number of Addresses • Four categories – 3-address machines • 2 for the source operands and one for the result – 2-address machines • One address doubles as source and result – 1-address machine • Accumulator machines • Accumulator is used for one source and result – 0-address machines • Stack machines • Operands are taken from the stack • Result goes onto the stack 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 9 Number of Addresses (cont’d) • Three-address machines – Two for the source operands, one for the result – RISC processors use three addresses – Sample instructions add sub mult 2005 To be used with S. Dandamudi, dest,src1,src2 ; M(dest)=[src1]+[src2] dest,src1,src2 ; M(dest)=[src1]-[src2] dest,src1,src2 ; M(dest)=[src1]*[src2] “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 10 Number of Addresses (cont’d) • Example – C statement A = B + C * D – Equivalent code: mult T,C,D add T,T,B sub T,T,E add T,T,F add A,T,A – E + F + A ;T ;T ;T ;T ;A = = = = = C*D B+C*D B+C*D-E B+C*D-E+F B+C*D-E+F+A 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 11 Number of Addresses (cont’d) • Two-address machines – One address doubles (for source operand & result) – Last example makes a case for it • Address T is used twice – Sample instructions load dest,src add dest,src sub dest,src mult dest,src ; ; ; ; M(dest)=[src] M(dest)=[dest]+[src] M(dest)=[dest]-[src] M(dest)=[dest]*[src] 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 12 Number of Addresses (cont’d) • Example – C statement A = B + C * – Equivalent code: load T,C mult T,D add T,B sub T,E add T,F add A,T 2005 To be used with S. Dandamudi, D – E + F + A ;T ;T ;T ;T ;T ;A = = = = = = C C*D B+C*D B+C*D-E B+C*D-E+F B+C*D-E+F+A “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 13 Number of Addresses (cont’d) • One-address machines – Uses special set of registers called accumulators • Specify one source operand & receive the result – Called accumulator machines – Sample instructions load addr ; accum = store addr ; M[addr] add addr ; accum = sub addr ; accum = mult addr ; accum = 2005 To be used with S. Dandamudi, [addr] = accum accum + [addr] accum - [addr] accum * [addr] “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 14 Number of Addresses (cont’d) • Example – C statement A = B + C * D – E + F + A – Equivalent code: load mult add sub add add store C D B E F A A ;load C into accum ;accum = C*D ;accum = C*D+B ;accum = B+C*D-E ;accum = B+C*D-E+F ;accum = B+C*D-E+F+A ;store accum contents in A 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 15 Number of Addresses (cont’d) • Zero-address machines – Stack supplies operands and receives the result • Special instructions to load and store use an address – Called stack machines (Ex: HP3000, Burroughs B5500) – Sample instructions push addr ; push([addr]) pop addr ; pop([addr]) add ; push(pop + pop) sub ; push(pop - pop) mult ; push(pop * pop) 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 16 Number of Addresses (cont’d) • Example – C statement A = B + C * D – E + F + A – Equivalent code: push E sub push C push F push D add Mult push A push B add add pop A 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 17 Load/Store Architecture • Instructions expect operands in internal processor registers – Special LOAD and STORE instructions move data between registers and memory – RISC and vector processors use this architecture – Reduces instruction length 2005 S. Dandamudi Chapter 2: Page 18 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” Second Edition, Springer, 2005. Load/Store Architecture (cont’d) • Sample instructions load store add sub mult Rd,addr addr,Rs Rd,Rs1,Rs2 Rd,Rs1,Rs2 Rd,Rs1,Rs2 ;Rd = [addr] ;(addr) = Rs ;Rd = Rs1 + Rs2 ;Rd = Rs1 - Rs2 ;Rd = Rs1 * Rs2 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 19 Number of Addresses (cont’d) • Example – C statement A = B + C * D – E + F – Equivalent code: load R1,B mult load R2,C add load R3,D sub load R4,E add load R5,F add load R6,A store 2005 To be used with S. Dandamudi, + A R2,R2,R3 R2,R2,R1 R2,R2,R4 R2,R2,R5 R2,R2,R6 A,R2 “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 20 Flow of Control • Default is sequential flow • Several instructions alter this default execution – Branches • Unconditional • Conditional – Procedure calls • Parameter passing – Register-based – Stack-based 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 21 Flow of Control (cont’d) • Branches – Unconditional branch target • Absolute address • PC-relative – Target address is specified relative to PC contents – Example: MIPS • Absolute address j target • PC-relative b target 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 22 Flow of Control (cont’d) 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 23 Flow of Control (cont’d) • Branches – Conditional • Jump is taken only if the condition is met – Two types • Set-Then-Jump – Condition testing is separated from branching – Condition code registers are used to convey the condition test result • Example: Pentium code cmp AX,BX je target 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 24 Flow of Control (cont’d) • Test-and-Jump – Single instruction performs condition testing and branching • Example: MIPS instruction beq Rsrc1,Rsrc2,target » Jumps to target if Rsrc1 = Rsrc2 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 25 Flow of Control (cont’d) • Procedure calls – Requires two pieces of information to return • End of procedure – Pentium » uses ret instruction – MIPS » uses jr instruction • Return address – In a (special) register » MIPS allows any general-purpose register – On the stack » Pentium 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 26 Flow of Control (cont’d) 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 27 Flow of Control (cont’d) • Parameter passing – Register-based • Internal registers are used – Faster – Limit the number of parameters » Due to limited number of available registers – Stack-based • Stack is used – Slower – Requires memory access – General-purpose » Not limited by the number of registers 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 28 Memory • Memory can be viewed as an ordered sequence of bytes • Each byte of memory has an address – Memory address is essentially the sequence number of the byte – Such memories are called byte addressable – Number of address lines determine the memory address space of a processor 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 29 Memory (cont’d) • Two basic memory operations – Read operation (read from memory) – Write operation (write into memory) • Access time • Time needed to retrieve data at addressed location • Cycle time • Minimum time between successive operations 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 30 Memory (cont’d) • Steps in a typical read cycle • Place the address of the location to be read on the address bus • Activate the memory read control signal on the control bus • Wait for the memory to retrieve the data from the addressed memory location • Read the data from the data bus • Drop the memory read control signal to terminate the read cycle – A simple Pentium memory read cycle takes 3 clocks – Steps 1&2 and 4&5 are done in one clock cycle each – For slower memories, wait cycles will have to be inserted 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 31 Typical read cycle Cycle 1 Cycle 2 Cycle 3 Cycle 4 CLK Address ADDR RD Data DATA 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 32 Memory (cont’d) • Steps in a typical write cycle • Place the address of the location to be written on the address bus • Place the data to be written on the data bus • Activate the memory write control signal on the control bus • Wait for the memory to store the data at the addressed location • Drop the memory write control signal to terminate the write cycle – A simple Pentium memory write cycle takes 3 clocks – Steps 1&3 and 4&5 are done in one clock cycle each – For slower memories, wait cycles will have to be inserted 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 33 Memory (cont’d) • Some properties of memory – Random access • Accessing any memory location takes the same amount of time – Volatility • Volatile memory – Needs power to retain the contents • Non-volatile memory – Retains contents even in the absence of power • Basic types of memory – Read-only memory (ROM) – Read/write memory (RAM) 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 34 Memory (cont’d) • Read-only memory (ROM) • Cannot be written into this type of memory • Non-volatile memory • Most are factory programmed (i.e., written) – Programmable ROMs (PROMs) • Can be written once by user – A fuse is associated with each bit cell – Special equipment is needed to write (to blow the fuse) • PROMS are useful – During prototype development – If the required quantity is small » Does not justify the cost of factory programmed ROM 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 35 Memory (cont’d) – Erasable PROMs (EPROMs) • Can be written several times • Offers further flexibility during system prototyping • Can be erased by exposing to ultraviolet light – Cannot erase contents of selected locations » All contents are lost – Electrically erasable PROMs (EEPROMs) • Contents are electrically erased • No need to erase all contents – Typically a subset of the locations are erased as a group – Most EEPROMs do not provide the capability to individually erase contents of a single location 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 36 Memory (cont’d) • Read/write memory • Commonly referred to as random access memory (RAM) • Volatile memories – Two basic types • Static RAM (SRAM) – Retains data with no further maintenance – Typically used for CPU registers and cache memory • Dynamic RAM (DRAM) – A tiny capacitor is used to store a bit – Due to leakage of charge, DRAMs must be refreshed to retain contents – Read operation is destructive in DRAMs 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 37 Memory (cont’d) • DRAM types – FPM DRAMs • FPM = Fast Page Mode – EDO DRAMs • EDO = Extended Data Output – Uses pipelining to speedup access – SDRAMs • Use an external clock to synchronize data output • Also called SDR SDRAMs (Single Data Rate) – DDR SDRAMs • DDR = Double Data Rate • Provides data on both falling and rising edges of the clock – RDRAMs 2005 • Rambus DRAM To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 38 Storing Multibyte Data 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 39 Storing Multibyte Data (cont’d) • Little endian • Used by Intel IA-32 processors • Big endian • Used most processors by default • MIPS supports both byte orderings • Big endian is the default • Not a problem when working with same type of machines • Need to convert the format if working with a different machine • Pentium provides two instructions for conversion – xchg for 16-bit data – bswap for 32-bit data 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 40 Input/Output • Types of I/O Devices: - Purely input device (e.g., keyboard, mouse). - Purely output device (e.g., printer, display screen) - Both an input and output device (e.g., Touch Screens, disks) 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 41 Input/Output Controller • I/O devices are connected to the system bus via I/O controllers. • I/O controller acts as an interface between the system and the I/O device. • I/O controller is used to help the processor to understand and respond to each I/O device. 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 42 Input/Output Controller • I/O controller is used for two reasons: 1- To provide the necessary low-level commands and data for proper operation of the associated I/O device. 2- I/O controller contains driver hardware to send current over long cables that connect the I/O device (i.e. The amount of electrical power used to send signals on the system bus is very low, so we need vary short cable to connect I/O device). 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 43 Input/Output Controller • I/O controller has three types of registers: Data Register, Status Register, and Command Register. 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 44 Input/Output Controller • I/O controller has three types of registers: - Data Register: holds the data to be input or output. - Status Register: Determines the status of I/O device (e.g. idle, valid, busy,…etc.) - Command Register: Tells the controller the operation requested by the processor. 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 45 Input/Output Ports • Processor and I/O interface points for exchanging data are called I/O ports • Two ways of mapping I/O ports – Memory-mapped I/O • I/O ports are mapped to the memory address space – Reading/writing I/O is similar to reading/writing memory » Can use memory read/write instructions • Motorola 68000 and MIPS processors uses memory-mapped I/O – Isolated I/O • In these systems, I/O address space is separated from the memory space. • Requires special I/O instructions (like in to read data from I/O port and out to write data to I/O port in Pentium) • Intel 80x86 processors support isolated I/O 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 46 Input/Output (cont’d) • Pentium I/O address space – Provides 64 KB I/O address space – Can be used for 8-, 16-, and 32-bit I/O ports – Combination cannot exceed the total I/O address space • • • • can have 64 K 8-bit ports can have 32 K 16-bit ports can have 16 K 32-bit ports A combination of these for a total of 64 KB – I/O instructions do not go through segmentation or paging • I/O address refers to the physical I/O address 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 47 Performance: Data Alignment • By using Data Alignment: The processor can read data items in one read cycle, and then internally assemble them. 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 48 Performance: Data Alignment 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 49 Performance: Data Alignment (cont’d) Sort time (seconds) 3 Unaligned 2 Aligned 1 0 5000 10000 15000 20000 25000 Array size This figure shows the impact of data alignment on the sort time of the bubble sort. These results were obtained on a 2.4-GHz Pentium 4 processor system. The unaligned sort time is approximately three times more than the aligned sort time. 2005 S. Dandamudi Chapter 2: Page 50 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” Second Edition, Springer, 2005. Performance: Data Alignment (cont’d) • Data alignment – Soft alignment • Data is not required to be aligned – Data alignment is optional » Aligned data gives better performance • Used in Intel IA-32 processors – Hard alignment • Data must be aligned • Used in Motorola 680X0 and Intel i860 processors 2005 To be used with S. Dandamudi, “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 51 Performance: Data Alignment (cont’d) • Data alignment requirements for byte addressable memories – 1-byte data • Always aligned – 2-byte data • A 16-bit data item is aligned if the data is stored at an even address (i.e., at an address that is a multiple of 2 and the least significant bit must be 0) – 4-byte data • A 32-bit data item is aligned if the data is stored at an address that is a multiple of 4 and the least significant 2 bits must be 0) – 8-byte data • A 64-bit data item is aligned if the data is stored at an address that is a multiple of 8 and the least significant 3 bits must be 0) 2005 To be used with S. Dandamudi, Last slide “Introduction to Assembly Language Programming,” S. Dandamudi Chapter 2: Page 52