Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
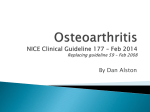
Magnetic Resonance in Medicine 62:815– 821 (2009) TREMR: Table-Resonance Elastography with MR Daniel Gallichan,1* Matthew D. Robson,2 Andreas Bartsch,3 and Karla L. Miller1 Magnetic resonance elastography (MRE) is a noninvasive method of measuring tissue compliance. Current MRE methods rely on custom-built hardware to elicit vibrations that are tracked by MR imaging. Knowledge of the wave propagation can be used to calculate the local shear stiffness of the tissue. We sought to determine whether the vibrations of the patient table that result from low-frequency switching of the imaging gradients could be used as an alternative mechanical driving mechanism for MRE. We designed a pulse sequence that includes a gradient lobe specifically for the excitation of mechanical resonance, allowing control of the time between the onset of the vibrations and the velocity-encoding of the readout. Data collected from a gelatin phantom with stiff cylindrical gelatin inserts demonstrated that wave propagation can be imaged with this method. Postprocessing to estimate the local spatial frequency of the waves also allows estimation of the local shear stiffness, where the stiff inserts are clearly identifiable. Data collected on the brain of a normal healthy volunteer showed clear rotational waves propagating from the skull inwards, also allowing generation of shear stiffness maps. Magn Reson Med 62:815– 821, 2009. © 2009 Wiley-Liss, Inc. Key words: MRE; elastography; vibration; resonance Magnetic resonance elastography (MRE) is a noninvasive method of measuring tissue compliance (1–3). Typically, a motion-sensitive MR readout measures the displacement of the tissue in response to either a single external impulse or at a range of phases in response to an oscillating external driver. Detailed knowledge of the motion of the tissue in response to the applied force can be used to generate maps of the tissue stiffness. There are many potential clinical applications for MRE, as it offers the possibility to “palpate” tissues well below the skin, or even within the skull. In addition to the ability to detect abnormally stiff tissue, MRE is also able to quantify stiffness—a measure that has already been demonstrated to have clinical relevance when imaging pathology in the liver (4), as well as potentially for breast imaging (5). However, the need for specialized hardware is a constraint of MRE: a mechanical driver is required to provide the external compressional force. While recent liver experiments have been carried out with clinically compatible devices that apply pneumatic vibrations delivered remotely via a flexible tube (6), such a device would be unlikely to perform well in areas 1Centre for Functional Magnetic Resonance Imaging of the Brain, John Radcliffe Hospital, University of Oxford, Oxford, UK. 2University of Oxford Centre for Clinical Magnetic Resonance Research, Oxford, UK. 3Department of Neuroradiology, University of Würzburg, Würzburg, Germany. Grant sponsor: Vera and Volker Doppelfeld Foundation (to A.B.). *Correspondence to: Daniel Gallichin, Medical Physics, Department of Diagnostic Radiology, University Hospital Freiburg, Hugstetter Str. 55, 79106 Freiburg, Germany. E-mail: [email protected] Received 7 January 7 2009; revised 9 March 2009; accepted 26 March 2009. DOI 10.1002/mrm.22046 Published online 7 July 2009 in Wiley InterScience (www.interscience.wiley. com). © 2009 Wiley-Liss, Inc. such as the brain. MRE has been successfully performed in the brain using elaborate hardware that couples an electromechanical driver (sited outside of the magnet) to a bite-bar (7–9) or to a “head-rocker unit” (10). Bite-bars are cumbersome to use clinically, and not all subjects tolerate them (11). The head-rocker appears to be more clinically feasible, but less intrusive hardware would be advantageous. The large gradient lobes used in diffusion-weighted MRI are known to induce vibrations that propagate to the patient table, which are noticeable to the subject during the scan. A recent study used a laser vibrometer to quantify these vibrations on a clinical 3T system during a standard diffusion-tensor imaging protocol, finding a strong component at 20 –25 Hz with an amplitude of ⬇100 m (12). As these amplitudes are a similar magnitude to the displacements used for MRE experiments, we sought to determine whether the vibrations resulting from low-frequency switching of the gradient coils could be used as the mechanical driver for MRE, thus obviating the need for external driver hardware. In this article we present preliminary data demonstrating clear vibrational wave propagation in both a gelatin phantom and the in vivo brain where the waves were elicited via gradient-induced table vibrations. THEORY The proposed pulse-sequence used for performing MRE is shown in Fig. 1. A high-amplitude gradient lobe of 20 ms duration is applied to excite the mechanical resonance in the 20 –25 Hz range. There is then a variable delay, which we refer to as ␦e, before a spin-echo sequence with velocity-encoding gradients. The velocity-encoding gradients introduce a phase offset at each voxel that is directly proportional to the local velocity in the direction of the gradients. We refer to this method as table-resonance elastography with MR (TREMR). We have not explicitly determined that it is the patient table itself that exhibits the strong resonance in this low-frequency range, but the patient table is the hardware responsible for transmitting the vibrations to the subject. For multislice acquisitions, each slice needs to be acquired following its own vibration-inducing gradient lobe. It is also important that the TR per slice is increased from the minimum available to allow time for the vibrations to decay between successive measurements. A variety of algorithms have been proposed to estimate stiffness from MRE data. Some of these methods estimate the local wave propagation speed (13) or spatial frequency (14) which, by assuming an isotropic medium of uniform density, can be used to used to estimate the local elastic modulus. Other methods find approximate solutions to the Navier equation, which describes the internal motion of an elastic solid, usually making similar assumptions regard- 815 816 Gallichan et al. RF GRO GV enc ⌬e 90° 180° EPI Readout Vibration-inducing gradient FIG. 1. Proposed pulse-sequence diagram for MRE. [Color figure can be viewed in the online issue, which is available at www. interscience.wiley.com] Velocity-encoding gradients ing isotropy and uniform density in order to simplify the procedure (7). It has also been demonstrated that using the local wave propagation speed to calculate stiffness is equivalent to solving the Navier equation under the assumptions of incompressibility, local homogeneity, and negligible attenuation of the waves (7). Calculations based on the equations of motion require making estimates of the spatial derivatives of the displacement field within the material. The TREMR method measures the velocity field rather than the displacement field, and although timeintegration of the velocity field will yield the displacement field, the data do not allow direct determination of the appropriate integration constant. This is because the TREMR approach is unable to measure the velocity field until a short time after the system is displaced from equilibrium due to the time between the end of the vibrationinducing gradient and the time of the velocity measurement (which is approximately at the midpoint between the two velocity-encoding gradients). To simplify the stiffness estimation we chose to use a method that estimates the local wave propagation speed, as this can be estimated from the waves observed directly in the velocity field, without needing to calculate the displacement field. There are three distinct approaches to MRE proposed in the literature. Displacement can be determined between equilibrium and during the application of a single external force, thereby allowing determination of the strain field (1). Displacement may also be determined at various phases of a harmonic external force (2). Alternatively, the single transient wave following a single external force can be measured (13). The data resulting from TREMR are distinct from all three previous approaches as the driving force, although close to a single frequency, is of varying magnitude due to the response of the mechanical resonance to the gradient switching. We have therefore found it beneficial to collect data that follow several periods of the mechanical resonant frequency to aid stiffness calculation, as the response is not in a steady state. To estimate the stiffness from TREMR data, it was first smoothed in the temporal domain for each voxel by fitting a cubic spline to the data from each voxel. We then applied spatiotemporal directional filtering (using simple filters on the velocity data Fourier transformed in space and time (15)) to split the data into the components representing waves propagating in the ⫹x, ⫺x, ⫹y, and ⫺y directions. We restricted the calculations to 2D for simplicity. For each timepoint we then estimated the local spatial frequency in the direction of the wave propagation. This was achieved by finding the spatial derivative of the phase of the analytic signal of each line of data in the direction of the wave propagation. We then took the mean spatial frequency across all timepoints, which we refer to as fsp. This approach to estimating the spatial frequency is only accurate for timepoints where there is a significant wave passing through the voxel, so contributions to the overall mean were only included where the filtered velocity component was greater than an arbitrary threshold corresponding to an empirically determined phase accrual of 0.08 radians. Using the timecourse of the filtered data we could then estimate the frequency of the driving force, fmech. The shear modulus, , is then given by the equation ⫽ 2 2 , where is the density of the material, which we fmech /fsp assumed to be 1 g/cm3. Phantom Experiment A phantom was constructed with two cylindrical inclusions of high gelatin concentration set within a body of gelatin mixed at a low concentration. To ensure strong mechanical coupling between the table and the phantom the coil, head restraints were placed tightly against the phantom container. The vibration-inducing gradient (amplitude 35 mT/m) was always applied along the left–right axis, as we have found this to produce the largest amplitude vibrations of the patient table. A 64 ⫻ 64 echo-planarimaging (EPI) readout at 3 mm isotropic resolution followed the velocity-encoding gradients, which consisted of two 8.5 ms gradient lobes at 36 mT/m with 26.2 ms between their centers. This corresponds to a venc (the velocity required to induce a phase offset of ) of 1.5 mm/s. The TE was 57 ms and the minimum achievable TR per slice was 75 ms. All imaging was performed on a Siemens (Erlangen, Germany) 3T TIM Trio system, using a single-channel T/R head coil to ensure reliable phase information. The minimum TR per slice was set to 600 ms and ␦e was varied from 0 to 300 ms in increments of 2 ms, with the TR per slice increasing by the same amount. The phantom was positioned with the long axis of the cylindrical inserts in the anterior/posterior direction for a human subject, meaning that imaging slices perpendicular to this axis were selected by choosing a “coronal” orientation. The readout direction was set to be the left–right direction. Five slices were acquired with velocity-encoding along the readout direction and then repeated with velocity-encoding along the phase-encoding direction. This led to a total acquisition time of ⬇19 min. Raw data were reconstructed offline using MatLab (MathWorks, Natick, MA). The resulting phase images were unwrapped in 2D using PRELUDE software (16). Any remaining phase discontinuities in the time-dimension were then easily removed using 1D unwrapping. The final shear stiffness map was calculated by averaging the values calculated from all four Fourier-filtered versions of both velocity-encoding directions. TREMR 817 FIG. 2. Example of measured phase offsets in gelatin phantom with ␦e ⫽ 100 ms with velocity encoding in (a) readout direction and (b) phase-encoding direction (readout direction runs left–right in these images). c: Mean magnitude image. d: Calculated shear stiffness map in units of kPa. e: Example unfiltered timecourses of a single voxel with velocity-encoding in the phase-encoding (PE) and readout (RO) directions. [Color figure can be viewed in the online issue, which is available at www.interscience.wiley.com] In Vivo Experiment A healthy 25-year-old male subject was scanned with 40 slices (64 ⫻ 64 matrix, 3 mm isotropic resolution) covering the entire brain. Foam padding was placed between the coil and the headphones to reduce subject movement and to ensure good mechanical coupling between the table and the subject’s head. Preliminary experiments found the vibrations to decay faster in the brain than in the gelatin phantom, so a minimum TR per slice of 150 ms was used (double the minimum possible). ␦e was increased from 0 to 80 ms in increments of 2 ms, although due to the need for a fat-saturation pulse the actual time between the vibration-inducing gradient and the excitation pulse was 12.2 ms for ␦e ⫽ 0 ms. Velocity-encoding was performed separately along each of the three principal axes of the system. This resulted in a total acquisition time of ⬇16 min. A brain mask was generated using the Brain Extraction Tool (BET) software (17). Following 2D phase unwrapping the median phase for each masked slice was subtracted from the values for each slice. This was found to be necessary to achieve smooth timecourses for each voxel as the 1D unwrapping used for the phantom data proved unreliable. The subtraction of the median should not affect the validity of the stiffness estimation, as this should correspond (approximately) to using velocity measurements in the frame-of-reference of the head rather than the scanner. The mean magnitude image across all volumes was coregistered to a T1-weighted structural scan at 1 mm isotropic resolution using FLIRT software (18) with 12 degrees of freedom and trilinear interpolation. This then allowed the same transformation to be applied to the calculated stiffness map to better compare the stiffness values with the underlying anatomy. RESULTS Phantom Experiment Figure 2a,b shows examples of the wave patterns observed in the gelatin phantom for ␦e ⫽ 100 ms with velocity encoding in the readout and phase-encoding directions. Wave-motion is observable throughout the imaging slice. Figure 2c shows the magnitude image, where the stiff inserts are barely discernible. By examining the timecourse of individual voxels (an example is shown in Fig. 2e), the frequency of the vibrations, fmech, was found to be 23 Hz. The stiff inserts are clearly identifiable in the calculated stiffness image (Fig. 2d). Average calculated shear stiffness values are 2.6 kPa for the background, with 11.2 kPa and 8.6 kPa for the left and right inclusions, respectively. The peak measured phase offset was ⬇10 rad, corresponding to a peak velocity of ⬇5 mm/s. By integration of the velocity over time, this corresponds to a maximum 818 Gallichan et al. LR AP SI FIG. 3. Examples of the unwrapped median-subtracted phase images at ␦e ⫽ 34 ms (close to peak absolute velocity). Axial, sagittal, and coronal slices are shown for velocity encoding in the left/right (LR), anterior/posterior (AP), and superior/inferior (SI) directions. peak–peak displacement of ⬇100 m. The vibration frequency and maximum displacement are in good agreement with previous measurements of table vibrations from low-frequency gradient switching (12) (even though the MR system is different). In Vivo Experiment Figure 3 shows the unwrapped median-subtracted phase images for ␦e ⫽ 34 ms (chosen as it is close to the peak absolute velocity). Peak values were ⬇7.5 mm/s for left/ right (LR) encoding, ⬇5 mm/s for anterior/posterior (AP) encoding, and ⬇2.5 mm/s for superior/inferior (SI) encoding. As with the phantom, the maximum peak-to-peak displacements were ⬇100 m. The LR and AP encodings demonstrate wavefronts that appear to move in synchrony with each other, whereas the SI waves appear to move independently. The peak velocity in the SI direction was found to be later than for the LR and AP directions (at ⬇75 ms rather than ⬇34 ms). The synchrony of the LR and AP encodings is made clearer when they are combined to create a 2D velocity vector, as is represented for a single slice over time in Fig. 4. Observation of the vector field over time allows rotational waves to be observed propagating from the skull inwards, with the wave of strongest amplitude beginning at ␦e ⬇20 ms. As only ⬇2 cycles of the driving frequency were measured (␦e up to 80 ms) the frequency itself was difficult to estimate directly from the data. For stiffness calculations it was therefore assumed that the frequency was the same as for the phantom at 23 Hz. The calculated shear stiffness map is shown after coregistration to a T1-weighted structural scan in Fig. 5. The shear stiffness map is blurred due to the upsampling in the registration (3 mm isotropic resolution of elastography data upsampled to match 1 mm isotropic structural data). By examining regions less affected by partial-voluming it is clear that gray matter has a lower stiffness (⬇5–10 kPa) than white matter (⬇15–30 kPa). TREMR 819 δe = 0 ms δe = 10 ms δe = 20 ms δe = 30 ms δe = 40 ms δe = 50 ms δe = 60 ms δe = 70 ms FIG. 4. Arrows representing the direction and magnitude of the in-plane velocity vectors (from LR and AP velocity sensitizations only) of a single axial slice as ␦e is increased from 0 to 70 ms. Size of arrows encodes magnitude of velocity, color of arrow encodes direction. FIG. 5. a: Reference T1-weighted structural image. b: Calculated shear stiffness map coregistered to structural image. c: Calculated shear stiffness map with transparency to allow comparison with structural features. 820 DISCUSSION We have demonstrated that vibrations of the patient table induced by low-frequency gradient switching are sufficient to generate vibrational waves that can be tracked with the proposed TREMR pulse sequence. In a gelatin phantom with stiff cylindrical inserts, the inserts could be clearly identified in the calculated shear stiffness map. When applied in vivo to a normal healthy brain, clear rotational waves propagating inwards from the skull can be observed and tracked with this method. These data can also be used to generate shear stiffness maps, indicating greater shear stiffness for white matter than gray matter. The shear stiffness values obtained here are similar in magnitude to those reported by a recent study using MRE (19). However, the nature of the implemented algorithm for calculation of the shear stiffness does not lend itself easily to providing estimates of the accuracy of the estimated stiffness values. This means that care should be taken in interpretation of the stiffness maps as they are currently presented as a “proof-of-concept” rather than attempting to make accurate measurements of the tissue properties. The elastic properties can also vary with the frequency of the applied vibrations, so this also needs to be considered when comparing quantitative values. Qualitatively, however, the resulting quality of the stiffness maps is similar to those obtained using existing MRE methods that rely on additional specialist hardware (8 –10,19). It is particularly noticeable in this dataset that a very stiff region is found close to the splenium of the corpus callosum. Further investigation is required to determine to what extent this is caused by a genuine variation in tissue stiffness or by an artifact arising from the postprocessing of the data. It is interesting to note that a stiffer region was also observed in this brain location in a previous MRE study (9). The main drawback of the proposed technique is that the frequency of the vibrations is predetermined by the mechanical resonance of the existing scanner hardware. This removes the possibility to choose the driving frequency that provides the best stiffness estimates, as may become possible for standard MRE methods as more data become available. In particular it may be desirable to use a higher driving frequency than the 23 Hz used here as this will result in shorter wavelengths within the brain, which are expected to lead to more reliable and higher-resolution stiffness estimates. However, the fact that TREMR requires no additional hardware remains a considerable advantage, which may outweigh the limitations in many circumstances— especially given the complexity of current MRE driver designs. It should be noted that we have referred in this article to the velocity measurements as though they are instantaneous samples, when in fact the phase offset will be proportional to the mean velocity during the velocity-encoding gradients. This means that the measurement will lose sensitivity to oscillatory motion as the frequency of the motion increases beyond the Nyquist limit associated with the velocity-encoding gradient lobes. In the case of our experiment the Nyquist frequency from the gradient timing was ⬇38 Hz, so the measurements close to the vibrational resonance at ⬇23 Hz should remain reliable. Gallichan et al. A further development that could be envisaged, related to TREMR, is the design of new MRE hardware that has its resonant frequency deliberately excited by gradient switching rather than the conventional approach of using a signal generator. This could act as a compromise between the ease of implementation of TREMR and the flexibility to choose the driving frequency of conventional MRE approaches. The estimation of the shear stiffness values from the TREMR data may be improved by further investigation, as the current implementation uses only a very simple approach to estimate the local spatial frequency of the vibrations. It may even be beneficial to develop algorithms specifically for TREMR, as the data are not representing a repeating harmonic wave (as in harmonic MRE) or following a single wave over time (as in transient MRE). Tailored stiffness estimation algorithms may therefore result in higher resolution and more reliable estimated stiffness values than the method presented here. The postprocessing may also be improved by knowledge of the exact form of the mechanical driving function. We have assumed that the driving function is a single frequency—measured to be 23 Hz from the TREMR phantom data. We did not directly measure the movement of the patient table, however, as we did not have easy access to appropriate hardware (such as a laser vibrometer or a magnetsafe accelerometer) to make such measurements. It is possible that a more complete careful characterization of the driving function could improve the solution to the equations of motion of the sample, improving the stiffness estimation. Additionally, knowledge of the relationship between the gradient-switching and the motion of the table could lead to more sophisticated design of the vibrationinducing gradient waveform to result in a more useful table motion. While we have chosen in this study to image the brain, the same approach could also be used to image vibrations in other parts of the body, provided sufficient mechanical coupling can be established between the patient table and the area of interest. It is not clear to what extent TREMR would function on scanner hardware different from the system used in our study, as the mechanical resonances are likely to vary greatly between scanner models and manufacturers. However, the close similarity between the waves that we observed in the TREMR data and those measured on a different 3T system from a different manufacturer (12) (both 20 –25 Hz, decaying over a few hundred milliseconds) suggest that the method may not be restricted to the Siemens TIM Trio system used here. CONCLUSION TREMR represents a novel approach to acquiring MRE data that requires no specialist hardware. Further work is necessary to determine if clinically relevant data may be acquired with this method. ACKNOWLEDGMENT The authors thank Dr. Lowri Cochlin for invaluable assistance in phantom construction. TREMR REFERENCES 1. Plewes DB, Betty I, Urchuk SN, Soutar I. Visualizing tissue compliance with MR imaging. J Magn Reson Imaging 1995;5:733–738. 2. Muthupillai R, Lomas DJ, Rossman PJ, Greenleaf JF, Manduca A, Ehman RL. Magnetic resonance elastography by direct visualization of propagating acoustic strain waves. Science 1995;269:1854 –1857. 3. Lewa CJ, De Certaines JD. MR imaging of viscoelastic properties. J Magn Reson Imaging 1995;5:242–244. 4. Talwalkar J, Yin M, Fidler J, Sanderson S, Kamath P, Ehman R. Magnetic resonance imaging of hepatic fibrosis: emerging clinical applications. Hepatology 2008;47:332–342. 5. Sinkus R, Lorenzen J, Schrader D, Lorenzen M, Dargatz M, Holz D. High-resolution tensor MR elastography for breast tumour detection. Phys Med Biol 2000;45:1649 –1664. 6. Yin M, Talwalkar J, Glaser KJ, Manduca A, Grimm RC, Rossman PJ, Fidler J, Ehman R. Assessment of hepatic fibrosis with magnetic resonance elastography. Clin Gastroenterol Hepatol 2007;5:1207–1213. 7. Manduca A, Oliphant TE, Dresner MA, Mahowald JL, Kruse SA, Amromin E, Felmlee JP, Greenleaf JF, Ehman RL. Magnetic resonance elastography: non-invasive mapping of tissue elasticity. Med Image Anal 2001;5:237–254. 8. Xu L, Lin Y, Xi ZN, Shen H, Gao PY. Magnetic resonance elastography of the human brain: a preliminary study. Acta Radiol 2007;48:112–115. 9. Green M, Bilston L, Sinkus R. In vivo brain viscoelastic properties measured by magnetic resonance elastography. NMR Biomed 2008;21: 755–764. 821 10. Sack I, Beierbach B, Hamhaber U, Klatt D, Braun J. Non-invasive measurement of brain viscoelasticity using magnetic resonance elastography. NMR Biomed 2008;21:265–271. 11. Jezzard P, Matthews PM, Smith SM (eds.). Functional MRI: an introduction to methods. Oxford: Oxford University Press; 2001. 12. Hiltunen J, Hari R, Jousmäki V, Müller K, Sepponen R, Joensuu R. Quantification of mechanical vibration during diffusion tensor imaging at 3 T. NeuroImage 2006;32:93–103. 13. Bishop J, Poole G, Leitch M, Plewes DB. Magnetic resonance imaging of shear wave propagation in excised tissue. J Magn Reson Imaging 1998; 8:1257–1265. 14. Manduca A, Muthupillai R, Rossman P, Greenleaf JF, Ehman RL. Local wavelength estimation for magnetic resonance elastography. IEEE Int Conf Image Process 1996:4. 15. Manduca A, Lake DS, Kruse SA, Ehman RL. Spatio-temporal directional filtering for improved inversion of MR elastography images. Med Image Anal 2003;7:465– 473. 16. Jenkinson M. Fast, automated, N-dimensional phase-unwrapping algorithm. Magn Reson Med 2003;49:193–197. 17. Smith SM. Fast robust automated brain extraction. Hum Brain Mapp 2002;17:143–155. 18. Jenkinson M, Smith S. A global optimisation method for robust affine registration of brain images. Med Image Anal 2001;5:143–156. 19. Kruse SA, Rose GH, Glaser KJ, Manduca A, Felmlee JP, Jack CR, Ehman R. Magnetic resonance elastography of the brain. NeuroImage 2008;39: 231–237.