Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
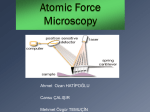
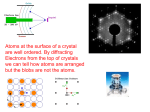
RESEARCH NEWS Nanomanipulation by Atomic Force Microscopy** By F. Javier Rubio-Sierra, Wolfgang M. Heckl, Robert W. Stark* The linking of our macroscopic world to the nanoscopic world of single molecules, nanoparticles and functional nanostructures is a technological challenge. Researchers in nanobiotechnology face the questions ªHow extract and analyze a single nano-object?º, ªHow to pick and place nano-objects?º and ªHow to prototype a functional nanostructure?º. Here, nanomanipulation by an atomic force microscope (AFM) in combination with optical manipulation by a microbeam laser offers a practicable solution. In such a system, the AFM can be operated as a nanorobot for manipulation purposes allowing for nanometer precision. A contact free manipulation is achieved by the laser microbeam. 1. Introduction Technologies to control and manipulate objects on the nanometer scale are thought to be key technologies for the upcoming decades or even century. The problems we are currently confronted with were already foreseen by Richard Feynman in 1959 as he described the challenges of small scale manufacturing in his famous and visionary talk Plenty of Room at the Bottom' at Caltech. Nearly fifty years later, there are two fundamental questions that are not yet fully answered: ªHow do we write small?º and ªHow do we manipulate and control things on a small scale?º. Science and technology have made tremendous progress in providing us with various methods to write on a small scale. Manipulating and controlling things on the nanometer scale, however, turned out to be far more difficult. Handling nanoscale objects includes finding these objects, tracking and moving them. Technologies are sought after that allow one to pick and place or cut and fuse in a completely alien environment. Thus, there are two important lines of investigation towards nanoscale manipulation: nanopatterning, where strategies are developed that allow us to generate arbitrary nanostructures, and nanotelerobotics, where the nanoworld is translated into a virtual reality that allows us to interact with smallest objects. Current research towards nanopatterning includes nanostructured surface functionalization and directed self-assembly of nanoscale objects. Surface properties such as wettability, adhesion, friction and specific chemical interaction can be controlled with nanometer resolution.[1] Controlled positioning of particles, clusters or single molecules allows for the investigation of new chemical processes, predefined molecule interaction and the direct assembly of new chemical compounds.[2] ADVANCED ENGINEERING MATERIALS 2005, 7, No. 4 Although various nanomanipulation methods have been developed, systems based on scanning probe microscopes offer the most versatile approach.[3] Among the other instruments of the scanning probe microscope family the AFM has the widest range of application, both for imaging and for nanomanipulation. However, standard AFM systems are restricted to small working areas and operating speed efficiency is quite limited. To enhance and expand the capabilities of the AFM for manipulation we have developed a combined system. In this system, we conjoin an AFM for high resolution imaging and manipulation with video microscopy and non-contact ablation by a ultraviolet (UV) microbeam laser for large scale manipulation of biological specimen.[4] This laser ablation method relies on a locally restricted ablative photodecomposition process without heating. ± [*] F. J. Rubio-Sierra, Prof. W. M. Heckl, Dr. R. W. Stark Ludwig-Maximilians-Universität München, Kristallographie and Center for Nanoscience CeNS, Theresienstr. 41, 80333 Munich, Germany E-mail: [email protected] Prof. W. M. Heckl Deutsches Museum, Museumsinsel 1, 80538 Munich, Germany. [**] We thank the German Federal Ministry of Education and Research BMBF for financial support within the framework program ªYoung Scientist Competition in Nanotechnologyº (03N8706). FRS thanks the Cusanuswerk for financial support. SEM image courtesy of Prof. G. Wanner, München. Chromosome samples courtesy of Dr. S. Thalhammer, München. DOI: 10.1002/adem.200400174 2005 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim 193 RESEARCH NEWS Rubio-Sierra et al./Nanomanipulation by Atomic Force Microscopy 2. AFM as a Nanorobot The main elements of an AFM are depicted in Figure 1a. The AFM probe consists of a high aspect ratio tip attached to the end of a micromachined cantilever. To obtain high-resolution images, the tip is brought into mechanical contact with the sample surface and the cantilever is deflected by the tip-sample loading forces. The deflection of the cantilever can be measured with high accuracy (about 0.1 ), the lateral resolution is limited by tip radius to less than 1 nm depending on the imaging conditions. The relative position between probe and sample is adjusted by three orthogonal piezo actuators. A laser beam is focused on the cantilever and reflected onto a quadrant photodiode in order to detect the deflection. The electronic control unit reads the photo diode signal and runs a feedback loop to control the tip deflection. Data are transmitted to a personal computer for graphical representation of the sample surface. Unfortunately, the performance of the open loop controlled piezo actuator is limited in an AFM. The dynamic response restricts the operation speed of the microscope and nonlinearities such as hysteresis and creep limit the position reproducibility. These issues severely affect the microscope's nanomanipulation performance. A straightforward solution to compensate for the nonlinearities is to operate the AFM in closed-loop in all three dimensions. However, this does not suppress the mechanical resonances of the actuator. Recently it was demonstrated that modern control feedback designs can dramatically increase the imaging speed of the AFM.[5] The operation of several cantilevers in parallel is another promising approach to increase the manipulation speed.[6] A simple and straightforward manipulation procedure includes the localisation and imaging of the area of interest, followed by the blind' feed-forward execution of the manipulation task as defined by the user. Finally, success or failure of the manipulation is determined by re-imaging the manipulated area. However, this procedure has some drawbacks. First, the state of the system may change during the manipulation process, mainly due to drift processes. Secondly, due to the strong non-linearities dominating the tip-sample interaction it is difficult to know a priori the manipulation results. Frequently, time-consuming trial-and-error experiments are required. Different elements of virtual reality can assist the human user to explore and manipulate nanoscale objects. Haptic interfaces that generate a feed back of the tip-sample forces provide the user with a ªfeelingº for surface structure and forces during the manipulation process. [7±9] Entire synthetic worlds facilitate the orientation within the nanoworld.[10] 3. Nanoscale Modification Methods by AFM Several methods have been proposed for the local modification of surfaces by AFM. One powerful patterning strategy is local anodic oxidation. The local growth of an oxide layer is induced by the application of an electric current between tip and sample surface. Under ambient conditions, the water meniscus acts as an electrolyte. Electronic devices such as nanowires, metal-oxide field effect transistors (MOSFET), single-electron transistors and quantum point contacts have been fabricated.[3] The control of the growth direction of organic molecule monolayers with conducting properties is a basic issue for the development of molecular electronics devices that could be solved using a silicon oxide template fabricated by means of local anodic oxidation.[11] Chemical surface modification by AFM nanolithography can be achieved by adding molecules to the surface, e.g. by dip pen nanolithography,[12] or by substitution of surface components. In substitution lithography (nanografting and nanoshaving), self-assembled monolayers are removed by means of mechanical desorption by the AFM tip followed by in-situ replacement of a second component.[13] Another prominent example for AFM nanomanipulation is mechanical nanomachining.[14] In this manipulation mode the loading force is increased beyond the limit for plastic deformation of the material. The main parameters influencing the machining process are the applied normal force and the patterning speed. For a better control of the machining process, the machining force can be modulated in the so-called dynamic plowing lithography.[15] AFM nanomachining was demonstrated on a wide variety of materials including metals,[16] semiconductors,[17] polymers,[18] and biomaterials.[19] Selective removal of superficial layers to study the internal structure of biological specimens has been achieved revealing the internal structure of collagen[20] or a bacterial cell wall.[21] Mechanical nanomanipulation was also used to extract small amounts of DNA from human metaphase chromosomes.[22] Fig. 1. (a) Scheme of an atomic force microscope (AFM). The sample is raster scanned and a small nanotip probes the sample surface. A light lever detection scheme is used to measure the deflection of the cantilever due to the surface topography. (b) Actual design of the AFM system placed on top of an inverted optical microscope. 194 2005 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim http://www.aem-journal.de ADVANCED ENGINEERING MATERIALS 2005, 7, No. 4 Rubio-Sierra et al./Nanomanipulation by Atomic Force Microscopy We have built a nanomanipulator with a tailor-made controlling system that includes robotic operation of the system and haptic interfacing. Currently, the system can accomplish the following tasks: (i) identification of region of interest for manipulation; (ii) surface modification beyond light diffraction limit; (iii) manipulation of nanoscale components; (iv) material extraction in the micron and nanometer scale; (v) high efficiency operation by user-friendly design. To fulfil these requirements in a single instrument, different imaging and manipulation techniques were combined. Figure 2 shows a sketch of the nanomanipulation system for the combination of AFM and UV-laser photoablation. The tailor-made AFM system (Fig. 1b) is placed on top of an inverted optical video-microscope (Axiovert 100S, Carl Zeiss). An UV-laser microbeam (P.A.L.M. Mikrolaser Technologies AG) is focused on the sample through the microscope objective using the fluorescence illumination path. The high power nitrogen laser is specified with a laser output of 337 nm, a pulse width of 3 ns, a pulse repetition rate between 0 and 60 Hz and a maximum pulse energy of 300 lJ. A digital signal processor module (Adwin-Gold, Jäger Computergesteuerte Meûtechnik) generates the waveform for AFM operation and nanomanipulation tasks. Two joysticks coupled to the system enable interactive control by a human user. The first one is a springloaded joystick used to position the sample in the planar coordinates. The second is a force-feedback joystick used to set the vertical probe position while delivering a haptic signal to the user. A Pentium PC with Windows 2000 communicates with the digital signal processor, manages the joysticks and runs a graphical user interface. Figure 1b shows the design of the AFM system. To avoid undesired coupling of the lateral and horizontal motion, planar and vertical actuators are separated. The sample is positioned by a piezoelectrically driven closed-loop XY positioner (P-517 PZT Flexure Stage, Physik Instrumente, Karlsruhe) with a resolution of 1 nm over a 100 lm range. An additional Z positioner (P-753 LISA NanoAutomation Stage Actuator, Physik Instrumente) controls the vertical probe positioning with a resolution of 0.1 nm over a range of 25 lm. Thus, position repeatability of 5 nm for sample planar motion and 1 nm for the probe vertical motion can be achieved over the full range. The real-time routines programmed in the DSP allow timeefficient operation of the system for both imaging and manipulation with a sample rate of 50 kHz. AFM routines generate the scanning waveform, regulate the tip-sample interaction, and communicate with the user interface for online representation of the data. The manipulation routines generate the waveform for the tasks predefined by the user and deliver the signals from the joysticks for interactive user control. All functionalities that are necessary for standard AFM operation are available to the user. The capabilities of the systems are extended by nanomanipulation modules. A lithography module is used for surface modification experiments by predefining manipulation parameters and the trajectory of the tip or laser focus. Alternatively, an interactive manipulation module gives control of the system to the user through the force-feedback joystick system. Thus, the user can set the tip position and interaction with the sample while receiving visual feedback of the tip position and directly feeling the applied forces. In order to compare the effects of mechanical and non-contact laser ablation, two adjacent human metaphase chromosomes were microdissected. As first step, the AFM cantilever was placed on top of a spread of chromosomes using videomicroscopy. Subsequently, the chromosomes were imaged with high-resolution to select two specimens for manipulation. After the image was acquired, the operator took control of the system using the joysticks, and both chromosomes were dissected. The chromosome situated on the right was dissected six times using the laser beam with a laser output energy of 0.7 lJ and a pulse repetition rate of 60 Hz. The chromosome on the left was microdissected three times using the AFM tip at different load forces. As a last step, the chromosomes were reimaged to check dissection results as shown in Figure 3.[23] The Fig. 2. Diagram of the nanomanipulator combining non-contact laser ablation, AFM, video- microscopy and robotic control. Fig. 3. Pseudo 3-dimensional representation of topographic AFM data showing human metaphase chromosomes dissected by means of mechanical AFM dissection (left chromosome, cuts A1-A3) and UV-laser photo ablation (right chromosome, cuts L1L6). Image range is 12x8 lm. ADVANCED ENGINEERING MATERIALS 2005, 7, No. 4 http://www.aem-journal.de 2005 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim 195 RESEARCH NEWS 4. Combined Laser and AFM Nanomanipulator Rubio-Sierra et al./Nanomanipulation by Atomic Force Microscopy RESEARCH NEWS ± Fig. 4. Topographic AFM image showing the dissection of a single chromatide of a human metaphase chromosome (arrow). The insert shows a scanning electron microscope image of an AFM tip after manipulation on a human metaphase chromosome. Biomaterial adhered to the tip and could be used for subsequent biochemical analysis. chromosome on the right was successfully dissected into seven different pieces. The minimal cut width (full-width-at-halfmaximum-height) was 380 nm. The smallest isolated chromosomal piece had a width of 420 nm corresponding to a volume of approximately 0.2 lm3. This remaining isolated volume contains about 4000 DNA base pairs. The cut depth achieved by mechanical dissection depends on the applied loading force. The first two attempts did not completely dissect the chromosome. The third cut completely dissected the chromosome yielding a cut width of 280 nm. The dimensions of the cut correspond to the mechanical dimensions of the AFM tip. In the AFM image of Figure 4, a single cut was performed on a human metaphase chromosome by means of AFM dissection;[19] the cut was so precise that only one chromatide of the chromosome was dissected. After AFM dissection of chromosomes, usually some biomaterial adheres to the tip (inset of Fig. 4). DNA thus extracted by AFM nanomanipulation experiments has been biochemically analyzed by means of a degenerate oligonucleotide-primed polymerase chain reaction.[22] Thus, mechanical dissection of chromosomes by an AFM tip represents a straightforward method to generate genetic probes. Conclusions: Nanomanipulation by atomic force microscopy provides a versatile technology for nanopatterning and nanomanipulation. For the extraction of DNA from human metaphase chromosomes an instrument that combines AFM nanomanipulation with UV laser surgery proved to be of high value. This experiment demonstrates that especially for applications in nanobiotechnology nanomanipulation devices are needed to provide additional feedback to the user. Haptic interfaces or even an entire virtual world help the human operator to explore and manipulate objects in an environment that is very distant in scale. Future developments in nanorobotics will certainly facilitate to bridge this distance leading to a deeper understanding of the nanocosmos. [1] M. Geissler, Y. N. Xia, Adv. Mater. 2004, 16, 1249. [2] W. M. Heckl, Adv. Eng. Mater. 2004, 6, 843. [3] D. Wouters, U. S. Schubert, Angew. Chem. Int. Edit. 2004, 43, 2480. [4] M. W. Berns, R. S. Olson, D. E. Rounds, Nature 1969, 221, 74. [5] G. Schitter, R. W. Stark, A. Stemmer, Ultramicroscopy 2004, 100, 253. [6] P. Vettiger et al, IBM J. Res. Dev. 2000, 44, 323. [7] M. Guthold, M. R. Falvo, W. G. Matthews, S. Paulson, S. Washburn, D. A. Erie, R. Superfine, F. P. Brooks, R. M. Taylor, IEEE/ASME T. Mech. 2000, 5, 189. [8] M. Jobin, R. Foschia, A. Kulik, Proc. 12th Int. Conf. on Scanning Tunneling Microscopy/Spectroscopy and Related Techniques 2003 (STM'03), Eindhoven, The Netherlands, 2003, 223. [9] F. J. Rubio-Sierra, R. W. Stark, S. Thalhammer, W. M. Heckl, Appl. Phys. A 2003, 76, 903. [10] A. Luciani, D. Urma, S. Marliere, J. Chevrier, Comput. Graph. UK 2004, 28, 509. [11] R. García, M. Tello, J. F. Moulin, F. Biscarini, Nano Lett. 2004, 4, 1115. [12] K. B. Lee, S. J. Park, C. A. Mirkin, J. C. Smith, M. Mrksich, Science 2002, 295, 1702. [13] S. Krämer, R. R. Fuierer, C. B. Gorman, Chem. Rev. 2003, 103, 4367. [14] T. A. Jung, A. Moser, H. J. Hug, D. Brodbeck, R. Hofer, H. R. Hidber, U. D. Schwarz, Ultramicroscopy 1992, 42, 1446. [15] U. Kunze, Superlattice Microst. 2002, 31, 3. [16] T. H. Fang, W. J. Chang, J. Phys. Chem. Solids 2003, 64, 913. [17] J. Cortes Rosa, M. Wendel, H. Lorenz, J. P. Kotthaus, M. Thomas, H. Kroemer, Appl. Phys. Lett. 1998, 73, 2684. [18] M. Munz, B. Cappella, H. Sturm, M. Geuss, E. Schulz, in Adv. Polym. Sci. Vol. 164 (Eds.: Abe, A., et al.), SpringerVerlag, Heidelberg 2003, p. 87±210. [19] R. W. Stark, S. Thalhammer, J. Wienberg, W. M. Heckl, Appl. Phys. A 1998, 66, 579. [20] C. K. Wen, M. C. Goh, Nano Lett. 2004, 4, 129. [21] M. Firtel, G. Henderson, I. Sokolov, Ultramicroscopy 2004, 101, 105. [22] S. Thalhammer, R. W. Stark, S. Muller, J. Wienberg, W. M. Heckl, J. Struct. Biol. 1997, 119, 232. [23] R. W. Stark, F. J. Rubio-Sierra, S. Thalhammer, W. M. Heckl, Eur. Biophys. J. 2003, 32, 33. Received: November 12, 2004 Final version: November 29, 2004 ______________________ 196 2005 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim http://www.aem-journal.de ADVANCED ENGINEERING MATERIALS 2005, 7, No. 4