Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
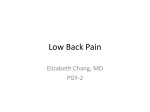
JOURNAL OF APPLIED BIOMECHANICS, 1997,13,334-346 O 1997 by Human Kinetics Publishers, Inc. Changes in Resultant Pedal Reaction Forces Due to Ankle Immobilization During Pedaling Cheryl D. Pierson-Carey, David A. Brown, and Christine A. Dairaghi The purpose of this study was to determine the effects of limiting ankle motion on pedal forces. Sixteen adults pedaled an instrumented ergometer against constant cadence and frictional load while wearing hinged braces. Ankle motion was limited under four randomly assigned conditions: both braces unlocked (UL), only the preferred leg (PL) brace locked, only the nonpreferred leg (NPL) brace locked, and braces on both legs (BL) locked. Measurements of pedal force, crank, and pedal angles were sampled at 2001s for 20 s. With both braces locked, resultant force mean magnitude decreased during the downstroke, due to reduced radial crank force. Asymmetry between PL and NPL decreased during the power phase when only PL was braced but increased when only NPL was braced. It was concluded that constrained ankle motion, as may occur with ankle injury or hemiplegia, reduces the ability to transmit power during the downstroke while enhancing ability during the upstroke. Propulsion during human locomotion requires a firm interface between the foot and the environment. Effective propulsion relies largely upon the ability of the ankle joint to place the foot in a stable position (Rodgers, 1988). Consequently, biomechanical and/or neurological impairments at the ankle may result in ineffective propulsive capabilities. When these impairments are unilateral, an asymmetry in propulsive forces may lead to unstable and unsafe locomotion (Giuliani, 1990). Ankle immobilization or disuse of the ankle joint secondary to paresis and/or muscle weakness can lead to viscoelastic and noncontractile tissue changes (Cornwall, 1984; Dietz & Berger, 1983; Giuliani, 1990; Smidt, 1990). This biomechanical impairment is manifest as a reduction in or complete lack of mobility at the ankle, which may place the foot in positions that are less effective during the propulsive phases of locomotion. To study the relative contributions of ankle joint mobility to locomotor propulsion, we used a task that has well-defined and well-controlled mechanical constraints. Walking is a difficult locomotor task to study, because people can demonstrate large interindividual variations, and patients may have protective gait mechanisms that are hard Cheryl D. Pierson-Carey was a graduate student at Samuel Merritt College, Oakland, CA, when this study was conducted. She is currently with the Department of Physical Therapy at Kaiser Permanente, Fremont, CA 94538. David A. Brown and Christine A. Dairaghi are with the Rehabilitation Research and Development Center, Veterans Affairs Health Care System, 3801 Miranda Ave., Palo Alto, CA 94304. Direct correspondence to David A. Brown. Pedal Reaction Forces 335 to experimentally control (Benecke, Conrad, Meinck, & Hohne, 1983). The variables related to bipedal movement during pedaling, however, are easier to control, since the kinematics of the legs are constrained by the bicycle's crank trajectory. A bicycle ergometer, modeled as a planar five-bar linkage system with only three degrees of freedom, is mechanically simple and lends itself to quantitative analysis (Gonzalez & Hull, 1989; Hull & Jorge, 1985). Pedaling studies provide valid and reliable measurements that support the use of bicycle ergometer pedaling as an ideal way to study the biomechanical components of leg movement (Fregley & Zajac, 1996; Gonzalez & Hull, 1989; Hull & Jorge, 1985). Environmental conditions, such as seat height or footlpedal interface, and task conditions, like workload or velocity, can be manipulated for systematic study of functional locomotor forces, kinetics, and kinematics (Gregor, Broker, & Ryan, 1991; Kautz, Feltner, Coyle, & Baylor, 1991). Bicycle ergometer pedaling has been used to study asymmetrical force production in both unimpaired populations (Daly & Cavanagh, 1976; Ericson, Ekholm, Svensson, & Nisell, 1985; Ericson, Nisell, & Nemeth, 1988) and patient populations (Benecke et al., 1983; Brown, Burgar, Kautz, Dairaghi, & Dunn-Gabrielli, 1994; Brown, Dairaghi, Stevenson, Wu, & Zajac, 1992; Giuliani, Harro, & Rosecrance, 1989; Rosecrance & Giuliani, 1991). Furthermore, bicycle ergometers are readily available in clinics and are commonly used for strengthening and endurance exercise in many types of rehabilitation. The foottpedal interface, by way of the crank, is the firm link with the environment for propulsion during pedaling. Ankle position may significantly affect the application of forces to the crank produced by the muscles of the leg. Likewise, the ankle trajectory is known to change as a result of changes in workload (Ericson et al., 1988). "Ankling," a technique used by world-class cyclists that is thought to increase effective forces to the crank, can increase crank acceleration (Gregor et al., 1991). Studies with neurologically unimpaired subjects show somewhat asymmetrical kinematics of bipedal tasks that might be related to the asymmetry of forces produced by each leg in the absence of ankle impairments (Benecke et al., 1983; Daly & Cavanagh, 1976). Abnormal ankle trajectories may alter the biomechanics of pedaling and impair performance. Studies of subjects with neurological impairments suggest that decreased ankle range of motion may produce asymmetrical forces during bicycle ergometer pedaling (Benecke et al., 1983; Rosecrance & Giuliani, 1991). In a study by Benecke et al. (1983), the torque curve profiles produced by 12 subjects with marked spastic paraparesis and deficits in ankle dorsiflexion showed a maximum peak torque occurring at a different pedal angle compared to the other subjects in the study. The authors concluded that the ankle dorsiflexion joint deficits created an unfavorable angle of application of forces to the pedal. Rosecrance and Giuliani (1991) identified abnormal ankle kinematic trajectories during the upstroke phase of the pedaling cycle in a group of subjects with hemiplegia. In contrast, their neurologically unimpaired subjects produced a predictable dorsiflexion~~lantar flexion ankle pattern during the same cycling phase. Although these two studies singled out ankle joint mobility as a probable important contributor to the altered pedaling forces, the direct relationship between ankle movement and pedal forces was not assessed. In the present study, we used neurologically unimpaired subjects to determine the effects of severely limited ankle motion on pedal reaction forces during steady-state ergometer pedaling. Since limited ankle mobility is thought to be a major contributor to impaired pedaling performance, we hypothesized that bracing the ankles in a neutral position would significantlychange the pedal reaction force trajectories. Further, we expected Pierson-Carey, Brown, and Dairaghi 336 that bracing only the ankle of the leg that produces the majority of force would reduce the overall asymmetry of forces produced by the two legs, while increasing asymmetry of forces by limiting ankle motion of the opposite leg. Methods Subjects + Sixteen subjects (8 female, 8 male) between the ages of 18 and 35 years (mean = 28 3.5 years) were selected for this study. In an effort to eliminate force asymmetries that could be due to anthropometric andlor passive tissue differences, subjects were initially screened for abnormal ankle range of motion in either of the two legs (Daniels & Worthingham, 1986) and leg length discrepancies of greater than one-half inch (Subotnick, 1976). Subjects were also screened for signs, symptoms, or significant history of neurological or cardiovasculardisease. To avoid including subjects who had learned to adopt skilled ankling strategies (Gregor et al., 1991), we chose only recreational cyclists (operationally defined as anyone who bicycled two or fewer times per week). The protocol for this study was approved by the Stanford University Human Subjects committee and was in compliance with federal policy on the protection of human subjects. Informed consent was obtained from each subject before the experiment began. A bicycle with an instrumented pedal system, a seat with a backrest, and a workload ergometer was used (Figure 1). Pedal force transducers, composed of strain gauges in a 1 1 AID Unlocked Anre Brace Pedal Forces Pedal Encoder Signal - Figure 1 Experimental setup showing the bicycle ergometer, subject, and measurements recorded. Shown is a schematic representation of the unlocked (right) and locked (left) brace conditions. Pedal Reaction Forces 337 Wheatstone bridge, measured the normal and fore-aft forces on each pedal. Forces were measured with an absolute error bound of f 5 N (Newmiller, Hull, & Jajac, 1988). Three optical encoders, one at the end of each pedal spindle and one coupled to the crank, provided measurements of the relative crank and pedal angles throughout 360" of rotation. The seat and seat post were attached to a backrest, oriented 20" from the vertical, that had a semirigid shoulder harness and belt system. Handlebars were removed from this bicycle because subjects were able to lean safely and comfortably against the backrest. The absence of handlebars ensured that measured pedal forces were not influenced by the stabilizing forces generated from the upper body and arms. The workload ergometer was adapted from a standard Monark ergometer. A freewheel allowed the flywheel to spin if the subject slowed down or ceased pedaling. The friction on the flywheel, indirectly measured by a load cell, was controlled by adjusting the belt tension. To provide an output measure of velocity, an in-house-built electronic circuit was used to differentiate the crank position encoder signal. This signal was visually displayed to the subjects during pedaling. Two Ultra 3 ROM ankle foot orthoses (Orthopedic Technology, Inc., Tracy, California), referred to as "braces" in this study, were modified for use and worn by each subject throughout the testing. Each brace had an adjustable locking hinge at the malleoli with rigid medial and lateral uprights that spanned the length of each shank. Additionally, each brace had an inner toe-to-knee liner, an open-toe cushioned rubber sole, and six Velcro closure straps. The braces were modified by attaching cycling cleats to the bottom just beneath the forefoot so that the foot could be positioned over the pedal in the conventional way. These cleats clipped into a locking system on each pedal that ensured a rigid footlpedal connection (Davis & Hull, 1981). Experimental Protocol/Procedures Subjects pedaled the ergometer under four different braced conditions. First, subjects pedaled while both braces were unlocked (UL) so we could assess the control condition profile of forces and their relative asymmetry when the ankles were allowed to move freely. The other three conditions involved locking the brace of either the preferred leg (PL), the nonpreferred leg (NPL), or both legs (BL) at a 90" angle (neutral position). This locking allowed us to determine the kinetic effects of ankle immobilization during asymmetrical (PL or NPL) or symmetrical (BL) kinematic conditions. The order of the three locked brace conditions was randomly assigned for each subject. The neutral position was chosen because it placed the ankle muscles at functional lengths (i.e., neither too long nor too short) that avoided possible strain and damage to the muscles, ligaments, and joints. All testing was done on the same day for each subject. Our operational definition of range of motion was the anatomical movement available at a joint from a defined zero starting position as measured by a goniometer. For the purposes of this study, we were interested in ankle dorsiflexion (DF) and plantar flexion (PF) motion, which takes place between the talus and tibia and fibula within the ankle mortise. The neutral position occurs when the ankle is at a right angle to the lower leg and the lower leg is at a right angle to the thigh; this is also the zero starting position for measurements of DF and PF. The rigid uprights of the ankle brace were aligned with the shaft of the fibula so that when the brace was locked at 90°, the ankle was placed in a neutral position. Goniometric and visual inspection was used to ensure proper position of the ankle in the brace. Each trial consisted of the subject pedaling the ergometer against a 15 N . m frictional load, at a rate of 60 rpm, for approximately 30 s. Data collection began after the Pierson-Carey, Brown, and Dairaghi 338 subject reached the target speed and maintained that speed with some consistency (approximately 10 s). Measurements of pedal force, crank, and pedal angles were collected during each cycle. Measurements were analog-to-digital ( A D )converted and sampled at 2001s for 20 s. The digitized samples were stored on a 386 personal computer for further reduction and analysis. Data Analysis Tangential (Ft) and radial (Fr) component crank forces were calculated using the pedal reaction forces and pedal and crank optical encoder measurements. The Ft component of crank force is defined in this paper as that component of force directed perpendicular to the crank arm,whereas the F r component is defined as that component directed parallel to (i.e., along the length of) the crank arm. Resultant crank forces (Rfl were calculated as the vector sum of the Ft and F r components at each crank position. For purposes of characterizing force asymmetry, we defined the preferred leg (PL) as the leg that produced more than 50% of the mean Ft component during the UL condition when both ankles moved freely. The other leg was referred to as the nonpreferred leg (NPL). Data were analyzed by first inspecting the individual pedaling trials of all subjects. Then, cycles were averaged for each pedaling trial across subjects. After the average work done by both legs for each pedaling condition was calculated, all force measures were divided by this value. This process allowed all force measures to be expressed as a percentage of the average overall (mean) work done; hence, we could account for any differences in workload due to uncontrolled tightening or loosening of the friction belt. The average total work done by both legs was computed for each pedaling trial and then used to normalize the Ft and F r components and the Rf values so that they could be grouped with other subjects by condition (e.g. UL, PL, NPL, and BL). Finally, the force data were normalized to the mean Ft component value for that trial and grouped with other subjects by condition. In order to compare the magnitude and direction of forces, data were averaged over a 30' crank angle range, and the resulting average value was compared. When the relative asymmetry of forces was compared between the PL and NPL, data were first averaged over the 30" window, and then the differences between the two legs were calculated. Repeated-measures one-way ANOVA, blocked by subject, was used to test the hypothesis that differences in Rf, Ft, and Fr component crank forces existed across the locked brace conditions (Kvanli, 1988). Significance was set a t p < .05 for all tests, and a Tukey post hoc analysis was used to test for multiple comparisons among the conditions (Kvanli, 1988). Results Magnitude and Orientation of Reaction Forces The time history of magnitude and orientation of the Rf were altered as a result of locking the braces of both ankles in a neutral position (BL condition). The Rf magnitude and direction at each of 12 regions of the crank cycle are displayed in Figure 2. Throughout most of the crank cycle, with the exception of the top-dead-center (0' or 360') region, the Rf magnitude decreased as a result of locking the braces. The biggest difference in magnitude occurred at the bottom-dead-center (180') region. The orientation did not appear to change significantly, except during the 270' and 300" regions, and this was only by small amounts (5' and 8' difference, respectively). Results were similar for the PL and NPL Pedal Reaction Forces 0 deg TDC 270 deg BDC 180 deg KEY: 1 unit = mean F t component value - - p<.05 Rf magnitude difference b = p<.05 Rf orientation difference a unlocked both locked Figure 2 - Resultant crank force (Rf)vector magnitude and orientation at each of 12 regions of the crank cycle comparing the UL (both braces unlocked) condition with the BL (both braces locked) condition. Rf was averaged across all subjects, and data are from the preferred leg (PL) only. (Results from the nonpreferred leg [NPL] were similar to those from the PL). Rf was significantly reduced @ < .05) over the 120" to 300"regions. TDC = top dead center relative to the seat tube (0" region); BDC = bottom dead center relative to the seat tube (180" region). conditions, such that reductions in magnitude and changes in orientation of Rf were altered in the locked brace ankle. Thus, limiting ankle mobility helped reduce the forces applied to the pedal. The Ft and Fr components of the Rf also showed statistically significant changes in magnitude as a result of locking the braces. The Ft component, that is, the component which is perpendicular to the crank and, thus, responsible for accelerating the crank in a forward direction, decreased during the 120" and 150" regions of the downstroke phase, yet increased (i.e., became less negative) during the 210" through 300" regions of the upstroke (Figure 3). The net effect of these changes was a relatively constant mean Ft component, or total work, done by each leg throughout each cycle and across all test conditions. The percentage of mean work done by each leg was 53.9% (PL) versus 46.1% k 3.0% (NPL) and remained unchanged across conditions O, = .7). Therefore, it appears that the net effect of locking the braces was minimal, as reflected by the Ft component, mainly because the loss in force transmittal during the downstroke was made up by an increase in force transmittal during the upstroke. The Fr component, that is, the component which is directed along the crank and, therefore, does not directly contribute to crank acceleration, decreased from the 150" re- Pierson-Carey, Brown, and Dairaghi + unlocked - - o-- both locked crank angle (degrees) Figure 3 -Mean tangential crank force (Ft) component of the resultant force across all subjects and at each of 12 regions of the crank cycle for the UL (both braces unlocked) and BL (both braces locked) bracing conditions. Mean Ft was decreased with the BL condition during the 120' and 150°regions yet was increased (became less negative) during the 210° to 300° regions. gion through the 300" region of the crank cycle (Figure 4). This decrease occurred during the region of the crank cycle when the Rf was experiencing its greatest reduction during the locked brace conditions. Therefore, since the Fr decrease was not made up by an increase anywhere else in the crank cycle, it appears that the reduction in the Fr component was the major contributor to the reduction in the Rf trajectory. Asymmetry of Reaction Forces Since locking the braces of both ankles may effectively reduce the degrees of freedom of the pedaling task, a reduced amount of relative force asymmetry between the two legs under the BL condition might be expected. Indeed, the Ft component difference produced by the two legs was significantly reduced by 15% when both braces were locked ( p = .0036). This reduction in asymmetry was seen throughout most of the crank cycle (Figure 5). Subjects pedaled more symmetrically when only the PL brace was locked and less symmetrically when only the NPL brace was locked (Figure 6). The difference between the two conditions was most pronounced at about 150°, toward the end of the downstroke phase. These results follow from the observation that the locked conditions reduced the Rf applied to the crank (e.g., see Figure 2). Therefore, the asymmetrical characteristics of these force profiles, caused by relative preference for one leg over the other, could be altered by simply locking the brace of either the PL or the NPL. Consistent with the results presented in the previous section on magnitude and orientation of reaction forces, percentage of mean work done by each leg remained unchanged under asymmetrical locking conditions when compared to the symmetrical UL Pedal Reaction Forces unlocked -- - both locked 0- * p<0.05 crank angle (degrees) Figure 4 -Mean radial crank force (Fr) component of the resultant force averaged across ail subjects and at each of 12 regions of the crank cycle for the UL (both braces unlocked) and BL (both braces locked) bracing conditions. Mean Fr was significantly different @ < .05) with the BL condition during the O0 to 60' and 150' to 300° regions. -- 0- unlocked both locked crank angle (degrees) Figure 5 -Mean differences in Rf values between the preferred leg (PL) and nonpreferred leg (NPL) averaged across all subjects and at each of 12 regions of the crank cycle for the UL (both braces unlocked) and BL (both braces locked) bracing conditions. Although there were no significant changes found at each crank cycle region @ > .05), the average value for the BL condition showed a 15% decrement in asymmetry across the entire cycle @ = .0036). Pierson-Carey, Brown, and Dairaghi --c-- preferred locked both locked ---.o-.-. nonpreferred locked p<0.05 crank angle (degrees) Figure 6 -Mean differences in Rf values between the preferred leg (PL) and nonpreferred leg (NPL) averaged across all subjects and at each of 12 regions of the crank cycle for the BL (both braces locked), PL, and NPL bracing conditions. There were significant differences < .05) throughout the entire crank cycle, with the NPL condition demonstrating the least difference and the PL condition demonstrating the greatest difference. and BL conditions ( p = .7). This result further provided evidence for a conservation of relative effort between the two legs that is independent of the biomechanical constraint. Discussion Limited Ankle Motion and Reaction Forces One major result of this study is that the magnitude of reaction force trajectories was reduced when ankle mobility was limited by locking the brace in a neutral position during pedaling. Resultant forces were mostly reduced during the propulsive downstroke phase of the crank cycle. Recall that resultant crank forces (Rfi are the sum of the Ft and Fr trajectories at each position of the crank throughout the 360' cycle. During the initial downstroke phase (0"-90°), the magnitudes of any changes in the Ft and Fr components were very small and resulted in little change in the Rf trajectory. However, both the Ft and Fr components were reduced during the terminal downstroke phase (90'-180°), accounting for the majority of Rf reduction observed during the downstroke. Since terminal downstroke coincides with peak plantar flexion ankle angle (e.g., approximately 10" during unbraced ankle conditions; Brown, Kautz, & Dairaghi, 1996), the limited ankle plantar flexion during the locked brace condition might be responsible for the reduction in forces. Therefore, the normal plantar flexion that occurs during unconstrained pedaling might be a strategy for effectively transferring power from the hip and knee muscles to the foottpedal interface. Pedal Reaction Forces 343 Resultant forces continued to be reduced, as a result of locking the braces, during the upstroke phases, although to a lesser extent. During the initial upstroke (180"-270°), the majority of the reduction came from reduced Fr component contributions, with very little change to the Ft component. However, during the terminal upstroke phase (27O0360°), most of the reduction in Rf, mainly from reductions to the Fr component, was minimized by an increase in Ft component forces. This increase in Ft might have been due to added stiffness at the ankle that was present when the brace was locked, thus allowing leg muscles to be more effective in lifting the leg (and hence the pedal and crank) up against gravity using the toeclips. This added stiffness is usually supplied by ankle dorsiflexor muscle activation during unbraced pedaling and results in the ankle maintaining a relatively neutral position despite the tendency for the ankle to plantar flex when pulling up against toeclips. Hence, it appears that the net effect of locking the ankle brace in neutral is to limit the ability to transmit Ft during the downstroke (reduce acceleration due to muscle activity and the weight of the leg) by limiting the ankle's ability to place the foot and pedal in a more effective plantar flexed position. Conversely, locking the ankle brace can enhance the ability to transmit Ft during the upstroke (reduce deceleration due to the weight of the leg) by enhancing stiffness at the ankle during this critical part of the crank cycle. Asymmetry of Reaction Forces The other major result of this study was that differences between reaction forces generated by each leg were reduced by locking the brace of the PL and increased by locking the brace of the NPL. Recall that the PL produces the majority of Ft when both braces are unlocked. Hence, when the PL brace was locked, the PL was less able to generate reaction forces throughout the cycle and the differences between it and the NPL were reduced. Consequently, when the NPL brace was locked, the reaction force differences increased. Finally, since the BL condition tended to constrain each ankle equally, and since the reaction force differences between both legs were coincidentally reduced, there may be a causal relationship between ankle motion asymmetry and pedal reaction force asymmetry. Because we were unable to measure ankle motion directly during the unconstrained pedaling in this study, it remains for further studies to correlate ankle motion asymmetry with reaction force asymmetry during unconstrained pedaling. However, this is not to suggest that reaction force asymmetries are entirely due to mechanical constraints at the ankle. Sensory feedback changes during the locked brace conditions might be partly responsible for triggering adaptations in the neural motor control strategy used to produce consistent muscle forces and work output by each leg. Central nervous system (CNS) integration in neurologically intact individuals enables them to use continuous sensory feedback to make necessary and continuous adjustments in their motor output. Leg movements are a good case in point. Thelan (1992) showed that coordination between the two legs is dynamic; that is, the movement status of each leg transmits information through neural interconnections, thus determining synchronized leg movement. Her work with newborns and young infants underwater versus in midair demonstrated this ability of the CNS to both detect and respond to changes in the environment. Another component of the neural control of locomotor behavior has been attributed to central pattern generators (CPGs) (Grillner, 1981). Central pattern generators initiate and control the spatial and temporal output of motoneurons during rhythmic, repetitive leg movement, such as pedaling. Although CPGs in the spinal cord allow the legs to Pierson-Carey, Brown, and Dairaghi 344 act independently, a coupling between the CPGs results in coordinated, reciprocal movement. Perhaps this CPG coupling enables a normal neurological system to find and maintain a comfortable and relatively symmetrical movement pattern under normal pedaling conditions (free ankle motion) and adverse pedaling conditions (constrained ankle motion). The pedaling setup used in the present study differs, in several ways, from previous pedaling studies that assessed asymmetry of pedal forces in neurologically unimpaired populations. First, the backrestheat configuration inclined subjects backward, placing their hips in a more extended position, thus altering the mechanics of pedaling. Second, the absence of handlebars did not allow subjects to stabilize their upper bodies by leaning forward. Thus, upper body forces, present in conventional cycling, were not included. Finally, the lower leg braces, used in this study, added equal mass to the subjects' legs and increased the height of the fooupedal interface. In spite of the differences in the pedaling setup used, the pedal force asymmetry found in this study appears quite similar to that found in previous studies using conventional pedaling setups with neurologically unimpaired subjects. Daly and Cavanagh (1976) reported that peak crank torques averaged 54% versus 46% of the total peak torque for each leg, which is in agreement with the results presented in this paper. In addition, typical crank torque curves published elsewhere have similar features to those presented in this study (see Gregor et al., 1991, for review). In summary, although the pedaling setup in this study is different, the resulting kinetics of pedaling do not appear to be different from those of more conventional pedaling studies. Conclusions The results from this study have implications for both athletic performance and rehabilitation. With athletic performance, these results imply that free ankle motion is an important mechanical condition to allow higher reaction forces to be produced at the pedal, especially during the propulsive downstroke phase. The concept of "ankling," although not explicitly studied here, makes sense. The ankle undergoes motion excursions throughout one crank cycle with maximum plantar flexion occumng during the end of the downstroke and maximum dorsiflexion occurring during the end of the upstroke. Our results show that maintaining the ankle in a neutral position with a locked brace reduces the resultant forces throughout the crank cycle, especially those imposed by maximum plantar flexion during the power phase (i.e., at the end of the downstroke). Therefore, the results from this study support the belief that cyclists can optimize pedaling performance by using an ankling strategy. In clinical rehabilitation settings, ankle impairments after musculoskeletal injury and/or neurological insult can result in limited ankle motion, even after the injury has healed. Bicycle ergometers, instrumented to measure pedal reaction forces, are frequently used in research but are rarely used in clinical settings, yet they can provide valuable information for both the clinician and patient during rehabilitation of ankle impairments (Broker & Gregor, 1990;Newmiller et al., 1988). For example, Brown et al. (1994) showed that real-time force feedback from each pedal can be used to correct asymmetries in force production found in persons with poststroke hemiplegia. Our study also suggests that feedback about ankle range of motion (e.g., provided by an electrogoniometer) might also provide valuable information about pedaling performance and could be used to correct dynamic ankle motion deficiencies that can occur when a person avoids using an injured ankle. For example, in a person with a unilateral ankle impairment, pedaling an ergometer Pedal Reaction Forces 345 might reinforce increased asymmetrical patterns of movement occurring from the impairment unless those patterns are recognized and corrected through feedback and changes in pedaling strategies. Ankle constraints may also be advantageous during rehabilitation. The ERGYS powered leg cycle actually uses braces to constrain ankle joint movement for individuals with spinal cord injury. Using certain stimulation parameters, Schutte, Rodgers, Zajac, and Glaser (1993) designed a study to investigate the joint movements necessary to power the legs. They found that by locking the ankles, thereby reducing the degrees of control required by the stimulating device, they could forego stimulation of the ankle muscles and optimize the cardiovascular benefits of this exercise for this patient population. Therefore, clinicians can use a brace, locked or unlocked, at the ankle as a tool for either retraining loss of dynamic control of ankle motion or providing extra support for the foot/pedal interface during pedaling. References Benecke, R., Conrad, B., Meinck, H.M., & Hohne, J. (1983). Electromyographic analysis of bicycling on an ergometer for evaluation of spasticity of lower limbs in man. In J.E. Desmedt (Ed.), Motor control mechanisms in health and disease (pp. 1035-1045). New York: Raven Press. Broker, J.P., & Gregor, R.J. (1990). A dual piezoelectric element force pedal for kinetic analysis of cycling. International Journal of Sport Biomechanics, 6,394-403. Brown, D.A., Burgar, C.G., Kautz, S.A., Dairaghi, C.A., & Dunn-Gabrielli, S. (1994). Improving lower extremity force symmetry in individuals with hemiplegia. In K. Taguchi, M. Igarashi, & S. Mori (Eds.), Vestibular and neuralfront (pp. 263-266). Tokyo: Elsevier. Brown, D.A., Dairaghi, C.A., Stevenson, P.J., Wu, M., & Zajac, F.E. (1992). Neuromuscular alterations with different body orientations during cyclical movement. In M. Woollacott & F. Horak (Eds.), Posture and gait control mechanisms (Vol. 1, pp. 155-158). Eugene: University of Oregon Books. Brown, D.A., Kautz, S.A., & Dairaghi, C.A. (1996). Muscle activity patterns are altered during pedaling at different body orientations. Journal of Biomechanics, 29, 1349-1356. Comwall, M.W. (1984). Biomechanics of noncontractile tissue. Physical Therapy, 64, 1869-1873. Daly, D.J., & Cavanagh, P.R. (1976). Asymmetry in bicycle ergometer pedaling. Medicine and Science in Sports and Exercise, 8,204-208. Daniels, L., & Worthingham, C. (1986). Muscle testing: Techniques of manual examination (5th ed.). Philadelphia: Saunders. Davis, R.R., & Hull, L. (1981). Measurement of pedal loading in bicycling: 11. Analysis and results. Journal of Biomechanics, 14,857-872. Dietz, V., & Berger, W. (1983). Normal and impaired regulation of muscle stiffness in gait: A new hypothesis about muscle hypertonia. Experimental Neurology, 79,680-687. Ericson, M.O., Ekholm, J., Svensson, O., & Nisell, R. (1985). The forces of ankle joint structures during ergometer cycling. Foot &Ankle, 6, 135-142. Ericson, M.O., Nisell, R., & Nemeth, G. (1988). Joint motions of the lower limb during ergometer cycling. Journal of Orthopedic & Sports Physical Therapy, 9,273-278. Fregley, B.J., & Zajac, F.E. (1996). A state-space analysis of mechanical energy generation, absorption, and transfer during pedaling. Journal of Biomechanics, 29,81-90. Giuliani, C.A. (1990). Adult hemiplegic gait. In G.L. Smidt (Ed.), Gait in rehabilitation (pp. 253266). New York: Churchill-Livingstone. Giuliani, C.A., Harro, C.C., & Rosecrance, J.C. (1989). The effects of bicycle pedaling on the temporal distance and EMG characteristics of walking in hemiplegic subjects. Physical Therapy, 69,367. Gonzalez, H., & Hull, M.L. (1989). Multivariable optimization of cycling biomechanics. Journal of Biomechanics, 11/12, 1151-1 161. 346 Pierson-Carey, Brown, and Dairaghi Gregor, R., Broker, J.P., & Ryan, M.M. (1991). The biomechanics of cycling. In J.O. Holloszy (Ed.), Exercise and Sport Sciences Reviews (Vol. 19, pp. 127-169). Baltimore: Williams & Wilkins. Grillner, S. (1981). Control of locomotion in bipeds, tetrapods, and fish. In V.B. Brooks (Ed.), Handbook of physiology. The nervous system. Motor control (Vol. 11, Sect. 2, Part 2, pp. 11791236). Bethesda, MD: American Physiological Society. Hull, M.L., & Jorge, M. (1985). Amethod for biomechanical analysis of bicycle pedalling. Journal of Biomechanics, 18,631-644. Kautz, S.A., Feltner, M.E., Coyle, E.F., & Baylor, A.M. (1991). The pedaling technique of elite endurance cyclists: Changes with increasing workload at constant cadence. International Journal of Sport Biomechanics, 7,29-33. Kvanli, A.H. (1988). Statistics: A computer integrated approach. St. Paul, MN: West Publishing. Newmiller, J., Hull, M.L., & Zajac, F.E. (1988). A mechanically decoupled two force component bicycle pedal dynamometer. Journal of Biomechanics, 21, 375-386. Rodgers, M.M. (1988). Dynamic biomechanics of the normal foot and ankle during walking and running. Physical Therapy, 68, 1822-1830. Rosecrance, J.C., & Giuliani, C.A. (1991). Kinematic analysis of lower-limb movement during ergometer pedaling in hemiplegic and non-hemiplegic subjects. Physical Therapy, 71,334343. Schutte, L.M., Rodgers, M.M., Zajac, F.E., & Glaser, R.M. (1993). Improving the efficacy of electrical stimulation-induced leg cycle ergometry: An analysis based on a dynamic musculoskeletal model. IEEE Transactions on Rehabilitation Engineering, 1, 109-125. Smidt, G.L. (1990). Aging and gait. In G.L. Smidt (Ed.), Gait in rehabilitation (pp. 185-198). New York: Churchill Livingstone. Subotnick, S.I. (1976). The short leg syndrome. Journal of the American Podiatry Association, 66, 720-723. Thelan, E. (1992). Development of locomotion from a dynamic systems approach. In H. Forssberg & H. Hirschfeld (Eds.), Medicine and sport science: Movement disorders in children (Vol. 36, pp. 169-173). Basel, Switzerland: Karger AG. Acknowledgments We thank Steven A. Kautz, PhD, for help with analysis and interpretation of the data; James Anderson and Douglas Schwandt, MSME, for technical assistance; and Kevin McGill, PhD, and Felix E. Zajac, PhD, for their constructive comments about the manuscript. This study was supported by funds from the Department of Veterans Affairs, Rehabilitation Research and Development Division, and by a Career Development Grant from the American Association of University Women.