Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
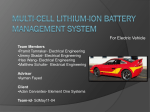
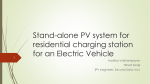
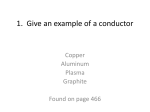
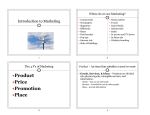
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPEL.2017.2767099, IEEE Transactions on Power Electronics 1 Constant Current/Voltage Charging Operation for Series-Series and Series-Parallel Compensated Wireless Power Transfer Systems Employing Primary-Side Controller Kai Song, Member, IEEE, Zhenjie Li, Jinhai Jiang, and Chunbo Zhu, Member, IEEE Abstract--This paper proposes a new control technique, which only employs the primary-side controller and load identification approach to adjust charging voltage/current for series-series (SS) and series-parallel (SP) compensated wireless power transfer (WPT) systems. The advantages are that dual-side wireless communication for real-time charging current/voltage adjustment is avoided as well as it is suitable for different charging modes, e.g. constant voltage (CV) and constant current (CC) charging defined by the battery charging profile. The load identification approach, which utilizes reflected impedance theory and quadrature transformation algorithm for calculating the active power, is proposed to estimate the equivalent load resistance of battery. Then, the CV/CC charging for both SS and SP compensation are achieved by the PI controlled phase shift H-bridge inverter. The simulation and experimental results validate the feasibility of proposed control method. During the CC charging, the 3.01A and 3.03 A for SS and SP compensation with the error of 1.2% and 1.4% are achieved. During the CV charging, the 25.8 V and 25.7 V for SS and SP compensation with the error of 1.1% and 1.3% are realized. The proposed method improves the performance of both SS and SP compensated WPT systems to be more suitable for the applications that require compact and light weight receiver. I. INTRODUCTION ireless power transfer (WPT) systems employing the alternating magnetic field to transfer power have been used for charging electric vehicle (EV), portable electronics and implantable biomedical devices [1]-[3]. Contrasts to the traditional plug-in charging systems, the WPT systems achieve the advantages of electrical and mechanical isolation, safe operation in harsh environment, and fully automatic charging. The researches in this field mainly focus on compensation topologies, power electronics converters and control schemes [4]-[6]. For practical applications, the electronic devices are powered by high-performance lithium-ion battery that requires CC/CV charging to meet its charging profile. As shown in Fig. 1, the CC charging is used to charge the battery at the beginning, then battery voltage increases. When the battery voltage rises to voltage Ub, the CC charging switches to CV charging immediately, then charging current decreases. When charging current is lower than one-tenth of the preset charging current, the charging process is over [7]. During the CC/CV charging process, the equivalent load resistance Ro, which is defined as the ratio of charging voltage to charging current, varies with the charging time [8]. Further, the variation of Ro influences charging current/voltage and system efficiency, then the research on closed-loop control scheme is vital to achieve accurate and robust control of the WPT systems [9]. W Index Terms—Constant current/voltage charging, series-series and series-parallel compensation, load identification, phase shift control, wireless power transfer. Manuscript received June 6, 2017; revised September 15, 2017; accepted October 23, 2017. Date of publication X, X; date of current version X, X. This work was supported by the National Natural Science Foundation of China under Project 51677032 and 51577034. Natural Science Foundation of Heilongjiang Province No. E2017045. Harbin Science and Technology Innovation Talents Special Fund Project under Grant No.2016RAQXJ002 and No. 2016FX2GJ013. Recommended for publication by Associate Editor XXX. (Corresponding author: Zhenjie Li) The authors are with the school of electrical engineering & automation, Harbin Institute of Technology, Harbin, 150001, China (email: [email protected]; [email protected]; [email protected]; [email protected]). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TPEL.2017.XXXXXX Fig. 1. Typical CC/CV charging profile of the Li-ion battery Based on the literature review [10]-[15], it points out that through properly designing the compensation topology, the approximate CC/CV charging can be achieved without closed-loop control schemes. However, it also shows that the control accuracy and stability are limited, which will be analyzed in-depth in section II. D. In practice, the basic 0885-8993 (c) 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPEL.2017.2767099, IEEE Transactions on Power Electronics 2 compensation topologies are categorized into four types, which are labeled as SS, SP, PS and PP, where the first S or P stands for primary-side series or parallel compensation and second S or P stands for secondary-side series or parallel compensation. In [10], it shows that when primary-side resonant current is maintained constant, the secondary-side series compensation performs as a voltage source, while the parallel compensation acts as a current source. Hence, the SS and SP compensation provide a possibility to realize CC and CV charging for the variable load through adjusting the primary-side resonant current. In [11]-[13], it points that both SS and SP compensation achieve CC/CV charging by choosing suitable system operating frequency. However, with considering both system efficiency and Zero Voltage Switching (ZVS) of H-bridge inverter, the conditions for CC/CV charging are always invalidated as analyzed in Section II. D. In [14]-[15], through designing the hybrid compensation on either primary or secondary side, the battery CC/CV charging is achieved. However, this method requires additional switches, inductors and capacitors, which leads to the problem of component and control complexity. In addition, the system parameters need to be properly optimized to meet CC/CV charging. Therefore, the closed-loop control method is still essential and deserved to be analyzed. Generally, the closed-loop control methods in the WPT system are classified as primary-side and secondary-side control [16]-[17]. Due to the secondary-side control methods require additional circuits (such as Buck and Boost converter) on the receiver, it may violate the compact and light weight requirements for smart phone, unmanned aerial vehicle (UAV) and implantable devices. Therefore, the primary-side control methods are fully considered in this paper. The traditional primary-side control methods mainly consists of three groups, named as dc-dc converter, variable frequency/phase shift Hbridge inverter and impedance matching network [18]-[20]. The dc-dc conversion requires Buck/Boost converter, which may influence the system efficiency and increase additional weight/cost [18]. Frequency adjusting results in the decrease of power transfer capability when system operating frequency deviates too much from the optimal frequency [19]. In addition, the available frequency ranges are regulated by the Industrial Scientific Medical (ISM) of ITU Radio Communication Sector, J2954 of society of automotive engineers (SAE) and Qi standard of wireless power consortium (WPC). The impedance matching that needs bulky capacitors or inductors array add additional weight, size and control complexity of the system [20]. Finally, although phase shift H-bridge inverter avoids the above disadvantages, the dual-side wireless communication is required to adjust the charging current/voltage that has the disadvantages of system instability and failure, when wireless communication is disturbed [21]-[22]. For primary-side control method without dual-side wireless communication, the primary-side power frequency droop control concept is proposed to regulate the output power [23]. In [24], it shows that the power flows to secondary side can be regulated by the transmitter-side electrical information. In [25], a systematic approach that analyzes the output power control of a wireless charging system without direct measuring load information is presented and verified with the designed eight coil resonators. Those methods mainly focus on the power flow regulation and no further analysis about CC/CV charging for battery charging. In [26], a single primary-side controller based on LCL-P compensation and phase shift H-bridge inverter are proposed to achieve CV charging for the variable load. The inadequacy of this method is that only CV charging is realized for resistive load and conditions for CC charging required by battery is not considered. Then, the primary-side control method that realizes CC/CV charging for battery is analyzed, which is the main contribution of this paper. It is straightforward to deduce that if charging current Io or charging voltage Uo is regulated by primary-side control method, the corresponding charging voltage (Uo= IoRo) or charging current (Io=Uo/Ro) may also be adjusted by estimating the equivalent load resistance Ro. In WPT systems, the commonly used load identification approaches are based on the impedance analysis and power conservation principle [27], the usage of energy injection mode and free resonant mode [28], the current characteristics under ZVS condition of a current-fed WPT system [29], the additional capacitor to make the system to work in two operating mode [30], and the input power measurement on the primary side [31]. Among the above methods, the method proposed in [31] is suitable for general load identification, and load resistance is estimated by detecting the primary-side input power, which is a simple and intuitive method. In this paper, the load identification approach, which is achieved by measuring the resonant current and voltage of primary-side coil, is proposed to estimate the Ro. The main motivation of this paper is to propose a novel primary-side controller that realize CC/CV charging for both SS and SP compensation through the PI controlled phase shift H-bridge inverter and load identification approach. The advantage is that dual-side wireless communication link for adjusting Io and Uo is avoided, then the stability and simplification of the system is ensured. In practice, depending on system requirements, the essential dual-side wireless communication signals, which can be realized by Zigbee, WiFi and Bluetooth, may still be reserved for system startup, shutoff and monitoring the SOC of battery. The rest of the sections are organized as follows: Section II gives the system structure and basic theoretical analysis. Section III proposes the load identification approach and verifies CC/CV charging for both SS and SP compensation. Section IV analyzes the closed-loop PI control scheme with simulations. Section V validates the proposed method with experiments. Finally, last section summarizes the conclusions drawn from the investigation. II. SYSTEM STRUCTURE AND THEORETICAL ANALYSIS In this section, the system structure and methodology for analyzing the WPT system are discussed. Then, basic output characteristics for both SS and SP compensation are analyzed to propose the primary-side control method. A. System structure The WPT system consists of two insulated parts named as primary side and secondary side, as depicted in Fig. 2. 0885-8993 (c) 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPEL.2017.2767099, IEEE Transactions on Power Electronics 3 Fig. 2. Structure diagram of the designed WPT system. On the primary side, the designed controller is employed to estimate the equivalent load resistance of battery and achieve CC/CV charging. The PI controlled phase shift H-bride inverter, which is a voltage source type inverter (VSI) and widely used in WPT systems due to their simplicity and effectiveness, is adopted to convert the dc voltage to ac voltage for the magnetic coupler. The primary-side series compensation is used to reduce volt-ampere rating, improve system efficiency and help achieve soft switching for the Metal Oxide Semiconductor Field Effect Transistor (MOSFET) [32]. Through the magnetic coupler, the alternating magnetic field energy is transferred from primary side to secondary side. On the secondary side, combined with suitable compensation, full bridge rectifier and filter, the obtained ac voltage is converted to dc voltage. Then, the CC/CV charging is realized by the proposed primary-side controller. In Fig. 2, the abbreviation of SSC and SPC indicates secondary-side series compensation and secondary-side parallel compensation, respectively. As usual, the selection of system operating frequency is a balance and overall consideration between system performance (such as system efficiency, power losses and thermal loss) and the selection of Litz wire, power electronic elements, magnetic coupler size and so on [33]. Therefore, with considering the system performance and commonly used experimental setup in the lab, the system operating frequency of 85.5 kHz is used to perform the theoretical analysis and verify the feasibility of proposed control method that is intend to be applied to the EV wireless charging. Further, it should be noted that the proposed method is suitable for other system operating frequency according to different applications and requirements. B. Secondary-side Rectifier and Filter Model Note that, based on different secondary-side compensation topology, the output filter is also different. As shown in Fig. 2, the full-bridge rectifier connected with a capacitive output filter (Co) is used for SS compensation. The input voltage and current of the rectifier are square and sine wave, respectively. In practice, only the fundamental component of voltage and current is considered for simplicity during the analysis of WPT system. Then, the charging current Io is expressed as 2I 1 (1) I o I 2 sin t dt 2 0 where, I2 is the amplitude of secondary-side resonant current. Since the battery charging process is slow and charging voltage is dc voltage, the battery can be modeled as a resistor Ro in WPT system [9]. However, it is noted that Ro has no relation with the battery internal resistance that decreases with the increase of battery’s state of charge (SOC). Assuming that the rectifier power losses are ignored in the following derivation, the power balance equation is given by 2 I2 2 (2) I R o o Re 2 where, Ro is the equivalent load resistance of battery and Re is the equivalent input resistance of the rectifier. From (1) and (2), the Re and input current Ie of the rectifier are deduced as Re = 8 2 Ro (3) (4) Io 2 2 When the rectifier that is connected with an inductive and capacitive output filter (LoCo) is applied for SP compensation, input voltage and current of the rectifier are sine and square wave, respectively. The Re and Ie of the rectifier are given by Ie = Re = Ie = 2 8 Ro 2 2 Io (5) (6) 0885-8993 (c) 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPEL.2017.2767099, IEEE Transactions on Power Electronics 4 C. Mutual Inductance Model As shown in Fig. 3, the Us is the equivalent output voltage of H-bridge inverter. The Ri, Li, Ci and Ii (i=1, 2) are resistance, inductance, compensation capacitor and resonant current of primary and secondary side, respectively. The M is mutual inductance. The U1 is induced voltage of L1. The Zp is impendence seen after the primary-side capacitor C1. Fig. 4. The PWM signals and output waveform of the phase shift H-bridge inverter. (a) (b) Fig. 3. Mutual inductance model. (a) SS compensation and (b) SP compensation. According to the Kirchhoff’s voltage law (KVL), the following equations are deduced as j M I1 U Zp (7) j M s Z s 0 I2 where, the primary and secondary side impedance of both SS and SP compensation are expressed as SS : Z p R1 j L1 1 jC1 Z s R2 Re j L2 1 jC2 SP : Z p R1 j L1 1 jC1 Z s R2 j L2 Re 1+jC2 Re (8) From (7) and (8), the resonant currents of primary and secondary side are given by Zs Us 2 I1 M Z p Z s (9) M I 1 U 2 j M 2 Z Z s p s It shows that the variation of Ro influences I1, and then the active power P1 transferred to the battery changes, which indicates Ro has relationship with P1. Through calculating P1, it is possible to estimate Ro indirectly. The relationship between I1 and Io or Uo are deduced by (3), (5) and (9), which indicates Io or Uo can be regulated by adjusting I1 even without knowing Ro. Further, when Ro is estimated, the Uo=RoIo or Io=Uo/Ro can also be regulated accordingly. It is noted that I1 and P1 are measureable/computable variable on the primary side, which just satisfies the proposed idea that primary-side controller can regulate Io or Uo without dual-side wireless communication link. Generally, the phase shift H-bridge inverter is used to adjust the primary-side resonant current. As shown in Fig. 4, duty width of Pulse Width Modulation (PWM) signal for MOSFET Q1, Q2, Q3, and Q4 are 50% without considering the dead time. The PWM signals for Q3 and Q4 lag that of Q1 and Q2 a certain phase shifted angle α whose value range is 0~180°. Based on the Fundamental Harmonic Analysis (FHA) that gives acceptable accurate results for operating points near/at resonance frequency of resonant tank, the Root Mean Square (RMS) value of Us is expressed as 2 2 (10) U s _ RMS = U bus cos 2 Through adjusting α, the Us_RMS is regulated along with the adjustment of Io and Uo. Therefore, phase shift H-bridge inverter is used to realize the proposed control method. D. Basic Output Characteristics of Both SS Compensation and SP Compensation As analyzed in [11], [34], when no control method is applied, both SS and SP compensation can achieve the approximate CC/CV charging by meeting specific conditions. However, the control accuracy is always limited and system parameters should be properly designed and optimized. Take SS compensation for example, the detailed analysis is performed to illustrate the limitations, the current/voltage gain between the primary and secondary side are given by M 2C1C2 Gi v I 2 1 U s j Z11 Re +Z12 (11) 2 U 1 M C1C2 Gv v e U s j Z11 + Z12 Re Z11 R1 2C1C2 +j C2 2 L1C1 1 2 2 2 2 Z12 M C1C2 +R1 R2 C1C2 +j C1 R1 L2C2 1 2 L1C1 1 2 L2C2 1 +j C2 R2 2 L1C1 1 (12) where, ω is the system operating angular frequency, the first subscript of the gain indicate I2 or Ue of the secondary side and the secondary one stands for Us. For instance, the Gi-v denotes the gain for secondary side I2 and primary side Us. Assuming that WPT system operates at resonant state (ω=ω1=ω2), R1 and R2 are neglected, the Io is maintained constant by meeting (13). 8U 2 2 2 2 (13) Io I2 Gi v U s 2 bus M =1 =2 where, ω1 and ω2 are the resonant angular frequency of primary and secondary side, respectively. When Ubus and M are constant, the SS compensation achieves the approximate CC charging without using closed-loop control method [11]. However, for practical WPT systems, the assumptions for (13) 0885-8993 (c) 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPEL.2017.2767099, IEEE Transactions on Power Electronics 5 may not be always met, such as R1 and R2 cannot be ignored and system operates at near resonant state. Then, the Gi-v is not a constant value as shown in the zoomed part of Fig. 5 (a). It also shows that the accuracy of Io is limited by the variation range of Ro and Ubus. When the range of Ro and Ubus is small, the charging current changes a little, which dues to the small variation of Gi-v. Then, the SS compensation realizes the approximate CC charging. However, when the variation range of Ro and Ubus are large, the Io decreases drastically with the increase of Ro, which is caused by the large variation of Gi-v, as shown in Fig. 5 (b). Although SS compensation can achieve the approximate CC charging under specific assumptions, it may be unacceptable for practical variable load applications that require accuracy control of Io and large variation of Ro. h 12 22 + 2 1 k 2 = 12 22 -4 1 k 2 1222 2 (16) (17) where, k is the coupling coefficient of magnetic coupler. Based on Pspice simulations, the frequency response characteristic of the voltage gain and system efficiency are plotted in Fig. 6. Fig. 6 (a) shows that the approximate CV charging is achieved at either 77.5 kHz or 95.5 kHz. Generally, the primary-side impedance should be inductive to realize zero voltage switching (ZVS) for the H-bridge inverter, which means ω should be larger than ω1, and then 95.5 kHz is chosen [12]. However, Fig. 6 (b) shows that when ω deviates too much from ω1, system efficiency decreases rapidly. Hence, although SS compensation realizes the approximate CV charging by choosing suitable ωh, system efficiency may be unacceptable for practical applications. (a) (a) (b) Fig. 5. Analysis of charging current for SS compensation. (a) Frequency response characteristic and (b) different dc input voltage. Through properly designing ω, the SS compensation can also realize the approximate CV charging against the variation of Ro. Based on (11), in order to achieve the load independent characteristic of Uo, the Z12 in gain Gv-v should be zero. Then, the constant Uo is given by 2 MC U (14) Uo Ue Gv v U s s 2 1 bus s L1C1 1 2 2 2 2 =s where, ωs is the angular frequency that realizes the CV charging for SS compensation. Assuming that R1 and R2 are neglected, the ωs (s=l, h) is deduced as l 12 22 2 1 k 2 (15) (b) Fig. 6. Analysis of charging voltage for SS compensation. (a) Frequency response characteristic and (b) system efficiency. The similar conclusions are also suitable for SP compensation. The current/voltage gain between primary and secondary side are given by 2 MC U (18) Uo Ue Gv v U s s 2 1 bus s L1C1 1 2 2 2 2 =s Z11 1 2 L1C1 jC1 R1 1 2 L2C2 jC2 R2 2 (19) M 2C1C2 2 2 Z12 jC1 M 1 L1C1 jC1 R1 R2 j L2 0885-8993 (c) 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPEL.2017.2767099, IEEE Transactions on Power Electronics 6 Assuming that the WPT system operates at resonant state, R1 and R2 are neglected, the constant Uo for SP compensation is achieved by meeting (20). 2 2 2 2 8 LU (20) Uo Ue Gv v U s 2 2 bus M =1 =2 Based on Pspice simulations, it show that only when Ro is relative large, the approximate CV charging can be realized (20). The approximate CV charging is invalidated when Ro is relative small. Further, the condition for the approximate CC charging is obtained by solving (18), and corresponding roots ωl and ωh are same with (15) and (16). To realize ZVS for Hbridge inverter, the ωh is used and constant Io is given by Io Ue Gi v U s 2 2 2 2 =h (21) h M hC1 U bus 2 hC1 h M 1 h2 L1C1 h L2 Although the approximate CC charging for SP compensation is achieved by setting ω as ωh, the drawback of low system efficiency that is similar with Fig. 6 (b) still exists. In summary, for practical applications, the range of Ro and ω may violate the conditions that are required by both SS and SP compensation for realizing the approximate CC/CV charging. Therefore, closed-loop control method is essential to achieve the accurate and robust control of Io and Uo. As a remark, it is noted that if no accurate control of Io and Uo is allowed, the basic output characteristic of both SS and SP compensation can be applied by properly optimizing system parameters. III. THE PROPOSED PRIMARY-SIDE CONTROL AND LOAD IDENTIFICATION APPROACH Through adjusting the primary-side resonant current, the principle of CV charging for SS compensation and CC charging for SP compensation are verified. Combined with the proposed load identification approach, the feasibility of CC charging for SS compensation and CV charging for SP compensation can also be validated with the estimated Ro. A. Primary-Side Controllable Charging Capability for Both SS and SP Compensation The analysis in this section focuses on the deduction of the relationship between Io or Uo and α, so as to verify the proposed primary-side control approach. When the WPT system operates at resonant state, R1 and R2 are ignored, the RMS value of I1 for both SS and SP compensation are deduced by (3)~(6) and (9)~(10). 16 2 Ro SS : I1_ RMS 3 U bus cos ( M )2 2 (22) L2 16 2 U bus cos 3 ( M )2 Ro C2 2 From (22), it shows that the variation of Ro influences I1_RMS that is adjusted by α. Then, the adjustment of Io or Uo by controlling I1_RMS is analyzed as below. SP : I1_ RMS = 2 Io A 8 R2 2 Ro 2 2 M C2 SS : I1_ RMS 2 2 2 2 2 Io 2 2 R R A L RoC2 R2 2 2 o M 8 8 (23) where, A=1-ω2L2C2. Assuming that R1 and R2 are ignored and system operates at resonant state, the Uo for SS compensation and Io for SP compensation are obtained from (23). SP : I1_ RMS 2 2 1 U o =U o M (24) 2 2 L2 SP : I1_ RMS I o = I o M It shows that once the WPT system is designed, the Uo for SS compensation and Io for SP compensation have a linear relationship with I1_RMS. The ratio are β and γ, respectively. During the battery charging process, the change of Uo and Io will manifest in the form of an increase or decrease in I1_RMS. With (22) and (24), it shows that phase shift H-bridge inverter can be used to adjust I1_RMS, and then the desired Uo or Io is achieved. Based on the system parameters listed in Table I, open-loop MATLAB Simulink simulations (α is 150°, Ro varies from 8.5 Ω to 90 Ω for SS compensation; α is 90°, Ro varies from 7 Ω to 8.5 Ω for SP compensation) verify the above theoretical analysis and waveforms are shown in Fig. 7. SS : I1_ RMS TABLE I SUMMARY OF THE SYSTEM PARAMETERS Symbol Parameter Value Ubus System input dc voltage 36 V f System operating frequency 85.5 kHz L1 Primary side coil inductance 104.5 μH R1 Primary side coil resistance 0.15 L2 R2 Secondary side coil inductance Secondary side coil resistance 51.2 μH 0.1 k Coupling coefficient 0.21 Ubattery Battery voltage range 20 V-26 V Io Constant charging current 3A Uo Constant charging voltage 25.8 V Ro Equivalent load resistance of the battery 6.75 Ω-8.5 Ω (CC charging) 8.5 Ω-85 Ω (CV charging) Fig. 7 shows that the envelope of I1 is same with Uo and Io. The corresponding ratio β and ratio γ are constant value (β=0.12 and γ=3.1). Therefore, the assumption that Io and Uo can be adjusted by I1_RMS without measuring the secondaryside information is verified. It also proves that Uo for SS compensation and Io for SP compensation changes as Ro varies. The main reason is that system operating frequency deviates from the required one, as analyzed in Section II. D. 0885-8993 (c) 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPEL.2017.2767099, IEEE Transactions on Power Electronics 7 2 M I1_ RMS 2 (27) R 2 8 P1 R1 I1_2 RMS The similar analysis is also suitable for SP compensation and Zp is given by 2 M R2e 2C22 R2 Re2 Z p R1 2 R2e 2 L2C2 Re L2 C2 R2 Re 2 (28) 2 M C2 Re2 L2 2C22 L2 Re2 j L1 2 R2e 2 L2C2 Re L2 C2 R2 Re 2 2 Ro = (a) where, R2e=R2+Re. For SP compensation, the P1 is obtained by the real part of Zp in (28). When the WPT system operates at resonant state, the estimated Ro is derived as 8 2 AC B + B 2 AC 4CD B AC E 2 2CD 2 B AC 2 Ro = A P1 R1 I1_2 RMS I1_2 RMS B M 2 2 C R2 (29) D C2 E BC AC 2 A D In practice, once the WPT system is designed, the parameters of magnetic coupler (R1, R2, L1, L2) and ω are assumed to be constant. The P1 and I1_RMS can be calculated and measured by the controller and sensors, and then the estimated Ro in (27) and (29) are obtained. 2 C. Calculation of the Active Power P1 The commonly used methods for measuring the active power P1 in the power system are classified into two types, which are defined as the integration of instantaneous current (b) and voltage during one period (method I) and definition of the Fig. 7. Open-loop simulations. (a) SS compensation and (b) SP compensation. active power (method II) [36]-[37]. For method I, it requires the same sampling interval and simultaneous sampling, which B. Load Identification Approach proposes a challenge on the hardware especially when the Based on (23), when Ro is known, the Io for SS signal frequency is high. For method II, the phase angle φ compensation and Uo for SP compensation can be adjusted by between the current and voltage should be measured. The I1_RMS. In [7], it points out that battery appears to the WPT corresponding difficulty is the accurate measurement of φ. system as a variable resistive load, which is calculated by Uo/Io. Therefore, a new active power calculation method based on It is also the commonly used theoretical method for analyzing quadrature transformation algorithm and reflected impedance the battery charging. Then, during the analysis of load theory is proposed [38]-[39]. Further, the principle diagram is identification approach, the battery is assumed to be a resistor. shown in Fig. 8 (a) and operating waveforms are shown in Fig. From Fig. 3 (a), the primary-side impedance Zp seen into the 8 (b). Compared with the original frequency of the input magnetic coupler for SS compensation is given by current/voltage, it shows that the frequency of HI1, HQ1, HQ2, 2 2 H M C R R I2 transferred to the A/D converter is largely reduced, which 2 2 e Z p R1 2 is meaningful and helpful for selecting the A/D converter and 2 2 2 C2 R2 Re 1 L2C2 microprocessor. (25) 2 M C2 1 2 L2C2 j L1 2 2 2 C2 R2 Re 1 2 L2C2 Assuming that the secondary-side losses are ignored, the power transferred to the battery equals to the power consumed by the real part of Zp. Then, the active power P1 is deduced as 2 2 M C2 R2 Re 2 (26) P1 I1_ RMS R1 2 2 2 2 C R R 1 L C 2 2 e 2 2 When the system operates at resonant state, the estimated Ro is derived from (26) and expressed as 0885-8993 (c) 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPEL.2017.2767099, IEEE Transactions on Power Electronics 8 U1 cos 2 f f1 t H I1 2 U1 sin 2 f f1 t H Q1 2 (33) I1 cos 2 f f1 t HI2 2 I1 sin 2 f f1 t HQ2 2 Based on (32), the P1 is calculated by the controller. During the calculation of P1, it is obvious that the phase angle φ between i1(t) and u1(t) is not measured. Further, the I1_RMS is obtained by the average of the definite integral i1(t) within the controller. Finally, combined with the analysis in Section III. B and C, the load identification approach is achieved. (a) (b) Fig. 8. Quadrature transformation algorithm. (a) Principle diagram and (b) simulation waveforms. The i1(t) and u1(t) are synchronous acquired by the current/voltage sensor and expressed as u1 t 2U1_ RMS sin 2 ft i1 t 2 I1_ RMS sin 2 ft (30) where, φ is the phase angle between i1(t) and u1(t), f and T are the signal frequency and period. The i1(t) and u1(t) are processed by the conditioning circuit firstly. Then, the conditioned i11(t) and u11(t) are multiplied by the mutually orthogonal signals SI(t) and SQ(t). S I t cos 2 f1t (31) S t sin 2 f t Q 1 where, f1 is the frequency of orthogonal signal. The signals after the multiplying unit are processed by the low pass filter (LFP). When the bandwidth B of the LPF meets 2|f1-f|, high frequency (f+f1) is filtered and low frequency (f-f1) is reserved. Finally, the equation of P1 is (32) P1 2 H I 1H I 2 H Q1H Q 2 D. Parameter Sensitivity Analysis It is necessary to analyze the sensitivity of proposed control method for variations in system parameters to verify it as a robust technique [40]. As discussed in Section III, the CC/CV charging and load identification approach for both SS and SP compensation are derived with specific assumptions. In practice, the system operates at/near resonant state, so as to enhance the power transfer and improve the system efficiency. Then, the main factors that influence (24), (27) and (29) are M and L2. The M is influenced by the vertical and horizontal misalignment, then simulation results obtained by the Ansoft Maxwell software are plotted in Fig.9 (a). It shows that the vertical misalignment has much more influence on M than L2. Further, the influences of M on Io, Uo and estimated Ro are analyzed in detail, and corresponding results are plotted in Fig.9 (b) and (c). Fig. 9 (b) shows that a small variation of M (vertical misalignment dx is less than 10 mm) has little influence on Io and Uo versus the load variation. Compared with M=15 μH (dx=0 mm) and M=14.7 μH (dx=10 mm), the change rate of Io and Uo are 1.5% and 1.8%, respectively. When dx becomes much larger, the change rate of Io and Uo increases. Fig. 9 (c) shows that the influence of M on estimated Ro is much more obvious than Io and Uo. Therefore, the available range of dx in this paper is relatively small, which is a flaw of the designed system at present. Fortunately, the auxiliary positioning device can be used to decrease the misalignment as small as possible, and the magnetic coupler can also be optimized to be misalignment insensitivity. Further, the methods that estimate the mutual inductance and execute adaptive control could be used to make the primary-side controlled WPT system be much more suitable and flexible for practical applications. 0885-8993 (c) 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPEL.2017.2767099, IEEE Transactions on Power Electronics 9 (a) (b) (c) Fig. 9. Parameter sensitivity analysis. (a) Misalignment versus M and L2, (b) Influence of M on Io, Uo and (c) Influence of M on estimated Ro (note that (b) has the same legend in (c)). IV. ANALYSIS OF THE PROPOSED PRIMARY-SIDE CONTROLLER The proposed control method is verified by MATLAB Simulink simulations. Firstly, the PI controlled phase shift Hbridge inverter realizes CV charging for SS compensation and CC charging for SP compensation. Secondly, the load identification approach is verified for both resistor and battery load. Finally, based on the estimated Ro, the CC/CV charging for both SS and SP compensation are achieved. A. Principle of the Proposed Closed-Loop Control Strategy As described in Fig. 10, the closed-loop control block diagram consists of load identification unit, CC/CV charging unit and PI controlled phase shift H-bridge inverter. The load identification unit includes active power measurement shown in Fig. 8 (a) and equivalent load resistance estimation algorithm. Through measuring the active power P1 and calculating (27) or (29), the Ro can be estimated. Combined with (24), the PI controller and MOSFET driver generate four PWM signals that drive the phase shift H-bridge inverter, and then the primary-side resonant current is regulated. Fig. 10. Closed-loop control block diagram. Take SS compensation for example, the battery charging process is shown as follow. During the CC charging, the Ro is estimated by the load identification approach, which is realized by acquiring primary-side resonant current i1(t) and inductor voltage u1(t) and calculating corresponding equations. The estimated Io_est is compared with a preset reference Io_ref, which represents the desired Io. The error ΔIo=Io_ref-Io_est is fed into the PI controller that generates the phase shifted angle α. Then, the I1_RMS is regulated to maintain the constant Io, and then Uo increases with the charging time. When Uo reaches the preset reference Uo_ref, the CC charging switches to CV charging. During the CV charging, the PI controller adjusts I1_RMS to maintain the constant Uo. When Io decreases to the pre-set stop Io_stop, the battery CC/CV charging process is over. It should be noted that the load identification approach does not work until α decreases from a large value αo to a small one α1, which aims to realize the system soft-starting. Therefore, the initial small primary-side active power P1 and resonant current I1 have no influence on the load identification approach. When α decreases to α1, which corresponds to a large P1 and I1, the load identification approach and PI controller for CC/CV charging starts to work. The above operation principle is also suitable for SP compensation. B. Simulations of CC/CV Charging for Both SS and SP Compensation The closed-loop simulation results are shown in Fig. 11. The preset Io and Uo are 3 A and 25.8 V, which are required by the battery parameters listed in Table I. From Fig. 11 (a), when Ro changes from 20 Ω to 60 Ω, the Uo is maintained constant and Io decreases from 1.28 A to 0.43 A for SS compensation. Fig. 11 (b) shows that when Ro changes from 7 Ω to 8.5 Ω, the Io is maintained constant and Uo increases from 21.2 V to 25.8 V for SP compensation. Compared with open-loop simulations shown in Fig. 7, it is obvious that CV charging for SS compensation and CC charging for SP compensation are realized by the PI controlled phase shift H-bridge inverter. Further, the feasibility of CC charging for SS compensation and CV charging for SP compensation will be verified by estimating Ro in the following sections. 0885-8993 (c) 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPEL.2017.2767099, IEEE Transactions on Power Electronics 10 (a) For SS compensation, Table II shows that Δ for both resistor and battery are less than 5.5% and Δ decreases with the increase of load resistance or battery voltage, while Δ for SP compensation is relative large. It further points out that the errors are mainly originated from the measurement noise and the assumption that system losses are ignored during the equation derivation. In practice, the average value of Ro_est can be used to reduce the errors and least-square method also enables Ro_est to converge to Ro with more data sets [28], [31]. As analyzed in Section III. A, the CC charging for SS compensation and CV charging for SP compensation can be achieved by estimating Ro. Then, the closed-loop simulations are performed to verify it and Ro is averaged to reduce the error during the simulations. Fig. 13 shows that CC charging for SS compensation and CV charging for SP compensation are realized. Combined with closed-loop simulations shown in Fig. 11 and Fig. 13, it shows that CC/CV charging for both SS and SP compensation are achieved by the proposed primaryside control method. (b) Fig. 11. Closed-loop simulations. (a) CV charging for SS compensation and (b) CC charging for SP compensation. As shown in (27) and (29), the Ro is estimated by calculating the primary-side active power P1 and RMS value of resonant current I1_RMS. Both resistor and battery load are simulated to verify the proposed load identification approach, the MATLAB Simulink model is shown in Fig. 12. (a) Fig. 12. Simulink model for the proposed load identification approach. In Fig. 12, the phase shift control unit generates four PWM signals for the H-bridge inverter. The active power measurement unit that is based on Fig. 8 (a) and load identification unit that is based on (27) and (29) estimates Ro. The Li-ion battery model in the Simulink is used as the system load. During the simulations, the Ro within the range of 6.75 Ω-85 Ω, which corresponds to the battery voltage varies from 20 V to 26 V, is tested and results are listed in Table II (the symbols are described as: actual load resistance Ro (Ω), estimated load resistance Ro_est (Ω), charging voltage Uo (V), charging current Io (A) and load identification error Δ). (b) Fig. 13. Closed-loop simulations with estimating Ro. (a) CC charging for SS compensation and (b) CV charging for SP compensation. 0885-8993 (c) 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPEL.2017.2767099, IEEE Transactions on Power Electronics 11 TABLE II SIMULATION RESULTS OF THE LOAD IDENTIFICATION APPROACH SS compensation SP compensation Ro Ro_est Δ Uo Io Ro_est Δ Ro Ro_est Δ Uo Io Ro_est Δ 6.75 7.12 5.5% 20.3 2.97 7.2 5.3% 6.75 7.28 7.9% 20.4 2.96 7.26 6.8% 7 7.37 5.3% 21.26 2.98 7.5 5.1% 7 7.54 7.7% 21.1 2.95 7.62 6.5% 7.5 7.87 4.9% 22.6 2.98 7.92 4.8% 7.5 8.05 7.3% 22.3 2.96 7.97 6.1% 8 8.37 4.6% 24.7 2.96 8.69 4.3% 8 8.54 6.8% 24.5 2.98 8.69 5.7% 8.5 8.87 4.4% 25.8 2.96 8.98 4% 8.5 9.04 6.4% 25.6 2.98 9.04 5.3% 10 10.41 4.1% 25.7 2.57 10.48 3.8% 10 10.51 5.1% 25.6 2.58 10.35 4.4% 20 20.44 2.2% 25.5 1.25 20.78 1.9% 20 20.76 3.8% 25.4 1.28 20.44 3.6% 40 40.43 1.1% 25.4 0.63 40.57 0.9% 40 40.68 1.7% 25.5 0.64 40.45 1.5% 60 60.35 0.58% 25.4 0.42 61.1 0.3% 60 59.7 0.5% 25.6 0.44 59.65 0.3% 80 80.36 0.45% 25.6 0.32 80.5 0.2% 80 77.3 3.4% 25.4 0.33 79.2 2.9% 85 85.34 0.4% 25.8 0.3 85.2 0.1% 85 81.8 3.8% 25.8 0.3 83.3 3.2% V. EXPERIMENTAL EVALUATION As shown in Fig. 14, an experimental setup in the laboratory has been built to verify the proposed primary-side control method. The system parameters are listed in Table I. It points out that the experimental setup is only a demonstration device and used to verify the feasibility of proposed control method. Based on different applications, the size and power capacity of the setup can be scale down/up accordingly. Fig. 14. The system experimental setup. A. System Experimental Setup For the phase shift H-bridge inverter, MOSFETs (Infineon IPW60R041C6) in combination with the freewheeling diodes (FAIRCHILD RHRP3060) are chosen. For the compensation capacitors, the polypropylene film capacitors are chosen for their low losses and high current bearing capability at high frequency. The magnetic coupler is built with N1=21 turns on the primary side (one layer with the optimized shape of ferrite cores, 200 mm×200 mm) and N2=18 turns on the secondary side (double layer, 150 mm×150 mm). The Litz wire (diameter of 0.1 mm and 700 strands) constructs the coils due to its lower frequency dependent resistance and smaller proximity effect. The parameters of coils and compensate capacitors are all measured by Agilent Precision Impedance Analyzer E4990A. The thickness of ferrite core is 5 mm. Note that the thickness can be further optimized to realize light weight and low cost on the condition that system performance is not compromised. The liquid crystal display (LCD) is used to display the wireless charging information. Fast recovery diodes (FAIRCHILD RHRP3060) construct the secondary-side full bridge rectifier. The electrolytic capacitor and inductor are used as the LC filter for SP compensation and electrolytic capacitor is used as the C filter for SS compensation. The current/voltage sensor and corresponding condition circuits acquire the current and voltage of primary-side coil. The DSP (Digital Signal Processor) is used to generate the phase shift PWM signals, execute the load identification algorithms, and realize the closed-loop PI control algorithm. Also, the DSP detects the system operation state, when over-voltage or over-current occurs, system will be shut down safely. B. Verification of CC/CV Charging for Both SS and SP Compensation Firstly, the CC charging for SP compensation and CV charging for SS compensation are verified. Then, combined with the estimated Ro of battery, the CV charging for SP compensation and CC charging for SS compensation are also achieved. The experimental waveforms are measured by the Tektronix Oscilloscope MDO3054B (Blue: H-bridge inverter’s output voltage Us, purple: charging voltage Uo, green: charging current Io and cyan: primary-side resonant current I1). 1) Without estimating Ro. During the CC charging for SP compensation, the Uo increases from 21.5 V to 24.3 V and I1_RMS increases from 9.31 A to 9.37 A, which is realized by changing α from 136.6°to 133.8°, as shown in Fig. 15. 0885-8993 (c) 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPEL.2017.2767099, IEEE Transactions on Power Electronics 12 Fig. 15. Experimental waveforms during the CC charging for SP compensation. (a) Uo=21.5 V and (b) Uo=24.3 V. Fig. 16. Experimental waveforms during the CV charging for SS compensation. (a) Io=1.28 A and (b) Io=0.44 A. Fig. 17. Experimental waveforms with estimating Ro. (a) CC charging for SS compensation and (b) CV charging for SP compensation. 0885-8993 (c) 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPEL.2017.2767099, IEEE Transactions on Power Electronics 13 The measured ratio γtest is 3.1, which coincides with the theoretical value γcal=3 from (24). It shows that I1_RMS changes little, which verifies that I1_RMS can be applied to control Io for SP compensation. Due to small fluctuation range of Ro during the CC charging, the variation of α and I1 are also small. As shown in Fig. 16, during the CV charging process for SS compensation, through increasing α from 117.8°to 148.5°, the I1_RMS decreases from 2.99 A to 2.93 A and Io decreases from 1.28 A to 0.44 A. The ratio βtest is 0.12, which coincides with the theoretical value βcal=0.11 from (24). It shows that the I1_RMS changes little, which further verifies that I1_RMS can be applied to control Uo for SS compensation. Compared with the CC charging, it is obvious that the variation of α is much more obvious, because the fluctuation range of Ro and I1 are large during the CV charging, as shown in Fig. 19. 2) With the estimated Ro. As analyzed in Section IV. B, when Ro is estimated, the CC charging for SS compensation and CV charging for SP compensation is also achieved by the proposed primary-side control method. During the CC charging for SS compensation, the Uo increases from 22.1 V to 24.4 V, α changes from 58.5° to 55.6°, and I1_RMS increases from 2.43 A to 2.67 A , as shown in Fig. 17 (a). The ratio β is 0.11. During the CV charging for SP compensation, the Io decreases from 1.31 A to 0.44 A, α increases from 119.6°to 131.5°, and I1_RMS decreases from 3.95 A to 1.32 A, as shown in Fig. 17 (b). The ratio γ is calculated as 3. In term of the soft switching of H-bridge inverter, two bridge lags have opposite behavior when system operates at resonant state. One of the bridge lags work in a zero current switching (ZCS) mode while the other one will work in zero voltage switching (ZVS) mode. Take the CV charging for SP compensation as an example, the leading leg MOSFET Q1/Q2 operates in ZVS mode and lagging leg MOSFET Q3/Q4 operates in ZCS mode, as depicted in Fig. 18. Fig. 18. The soft switching analysis for phase shift H-bridge inverter. (Note that I1 and Id are multiplied by 5) It shows that the leading leg has turn off loss PToff and lagging leg has turn on loss PTon [41]. In [42], it points out that the ZVS mode is influenced by other factors, such as α and Ro. Therefore, the further analysis about soft switching technique for the proposed primary-side control method will be our future works, which is helpful to improve the system efficiency. Combined with the above analysis, it is obvious that both SS and SP compensation realize CC/CV charging through PI controlled phase shift H-bridge inverter and load identification approach. It shows that small deviation between experimental and simulation results exists, which is caused by the difference between simulation and actual model, the errors of the sensors and parameters measurement. However, the feasibility of proposed method can still be verified by the same variation trend of experimental and simulation results. Take SS compensation for example, the CC/CV charging process is realized by the proposed control method, as shown in Fig. 19. During CC charging, the Uo increases from 20 V to 25.8 V, then CV charging works along with Io decreases from 3 A to 0.3 A. The estimated Ro of Li-ion battery are also plotted in Fig. 19. It shows that Ro increases slowly during CC charging and increases rapidly during CV charging. The value range is estimated as 6.7 Ω to 84.5 Ω [14]. Further, the same conclusions are also suitable for SP compensation. Fig. 19. The whole charging process and estimated Ro of Li-ion battery with SS compensation. C. System Efficiency and Losses Analysis The system efficiency from system dc input to battery is measured by Yokogawa WT1800 precise power analyzer during the charging process. The channel 5 and channel 6 are used to measure the system dc input power and dc output power of battery, respectively. The measured curves and print screen are shown in Fig. 20. Fig. 20 (a) shows that system efficiency of SS compensation ƞSS changes slightly during the CC charging, and decreases during the CV charging [43]-[44]. It also shows that ƞSS with small Ro that takes place during the CC charging and at the beginning of CV charging is much higher than large Ro during the latter stage of CV charging. The measured maximum ƞSS is 75.1%, which occurs near the transition point between the CC and CV charging. Fig. 20 (b) shows that the system efficiency of SP compensation ƞSP is low during the CC charging, whereas ƞSP is higher during the latter stage of CV charging. The measured maximum ƞSP is 61.1%, which occurs at the end of CV charging [7]. Fig. 20 shows that the variation trend of the experimental results is same with the simulation results and small deviation is caused by the power losses such as parasitic resistance and ICs, which is not fully modelled in the simulations. It is noted that the analysis of CC/CV charging for both SS and SP compensation in this paper is mainly aimed to 0885-8993 (c) 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPEL.2017.2767099, IEEE Transactions on Power Electronics 14 verify the feasibility of proposed primary-side control method. For practical applications, the SS compensation is more widely used and suitable for battery charging because of its load independent resonant characteristic, simple structure and high efficiency [7], [45]-[46]. design of H-bridge inverter and magnetic coupler are vital to improve the system performance. (a) (b) Fig. 21. Experimental results of the system losses. (a) SS compensation and (b) SP compensation. (a) Last but not least, the proposed primary-side control method not only avoids dual-side wireless communication link for CC/CV charging required by traditional primary-side control methods, but also realizes the compact, low cost and light weight receiver compared with secondary-side control methods. Those advantages make it be a preferred candidate for practical applications that requires CC/CV charging, such as portable devices, unmanned aerial vehicle (UAV) and so on. In further works, the methods for optimizing the system efficiency will be analyzed to make the proposed primary-side control method be much more suitable for commercial applications. It should be noted that the analysis methodology for the proposed primary-side control is also suitable for analyzing the CC/CV charging for both LCL-P and LCL-S compensation, which is also our later works. VI. CONCLUSION (b) Fig. 20. Experimental results of the system efficiency. (a) SS compensation and (b) SP compensation. To further improve and optimize the system efficiency, the system losses are analyzed. Generally, system losses mainly consist of H-bridge inverter losses Pinverter (turn on/off losses and conduction losses), magnetic coupler losses Pcoupler (coil losses and ferrite core losses) and rectifier losses Prectifier (turn on/off losses and conduction losses), and other losses Pothers [47]. The system losses are measured when the maximum system efficiency is achieved and results are plotted in Fig. 21. It shows that the H-bridge inverter and magnetic coupler losses account for a large proportion of system losses. Hence, the In this paper, a novel primary-side control method that realizes CC/CV charging is proposed for both SS and SP compensated WPT system. The advantages are that the measurement of secondary-side current/voltage is avoided and the compact and light weight receiver are also met. Firstly, the feasibility of CV charging for SS compensation and CC charging for SP compensation are verified by theoretical analysis and simulations. Then, through the load identification approach that is realized by the quadrature transformation algorithm and reflected impedance theory, the equivalent load resistance is estimated by the primary-side active power and resonant current. Finally, combined with the estimated equivalent load resistance, the CC/CV charging for both SS and SP compensation are realized by PI controlled phase shift H-bridge inverter. The simulation and experimental results validate the feasibility of the proposed control method with sufficient accuracy. REFERENCES [1] [2] S. Lee, B. Chao, and C. T. Rim, “Dynamics characterization of the inductive power transfer system for online electric vehicles by Laplace phasor transform,” IEEE Trans. Power Electron., vol. 28, no. 12, pp. 5902–5909, Dec. 2013 S. Li and C. Mi, “Wireless power transfer for electric vehicle applications,” IEEE J. Emerging Sel. Topics Power Electron., vol. 3, no. 1, pp. 4–17, Mar. 2015. 0885-8993 (c) 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPEL.2017.2767099, IEEE Transactions on Power Electronics 15 H. H. Wu, A. Gilchrist, K. D. Sealy, and D. Bronson, “A high efficiency 5 kW inductive charger for EVs using dual side control,” IEEE Trans. Ind. Informat., vol. 8, no. 3, pp. 585–595, Aug. 2012. [4] M. Fan, T. Zhang, X. Zhu, P. Luk, and C. Ma. “Compensation of Cross Coupling in Multiple-Receiver Wireless Power Transfer Systems,” IEEE Trans. Ind. Inform, vol. 12, no. 2, pp. 474–482, Jan. 2016. [5] G. A. Covic and J. T. Boys, “Modern trends in inductive power transfer for transportation applications,” IEEE J. Emerg. Sel. Topics Power Electron., vol. 1, no. 1, pp. 28–41, Jun. 2015. [6] M. Fan, C. Ma, and X. Zhu. “A Cascaded Boost–Buck Converter for High-Efficiency Wireless Power Transfer Systems,” IEEE Trans. Ind. Inform., vol. 10, no.3, pp. 1971–1980, Nov. 2014. [7] G. Buja, M. Bertoluzzo, and K.N. Mude, “Design and Experimentation of WPT Charger for Electric City-Car”, IEEE Trans. on Industrial Electronics., vol. 62, no. 62, pp. 7436-7447, Dec. 2015. [8] Duc Hung Tran, Van Binh Vu, and Woojin Choi. “Design of a High Efficiency Wireless Power Transfer System with Intermediate Coils for the On-board Chargers of Electric Vehicles,” IEEE Trans. Power Electron., vol. pp, no. 99, pp. 1–1, Feb. 2017. [9] E. Gati, and G. Kampitsis, “Variable Frequency Controller for Inductive Power Transfer in Dynamic Conditions,” IEEE Trans. Power Electron., vol. 32, , no. 2, pp. 1684–1696, Feb. 2017. [10] C. S. Wang, O. H. Stielau, and G. A. Covic, “Design considerations for a contactless electric vehicle battery charger,” IEEE Trans. Ind. Electron., vol. 52, no. 5, pp. 1308–1314, Oct. 2005. [11] W. Zhang and C. C. Mi, “Compensation topologies of high-power wireless power transfer systems,” IEEE Trans. Veh. Technol., vol. 65, no. 6, pp. 4768–4778, Jun. 2016. [12] W. Zhang, S. C. Wong, C. K. Tse, and Q. Chen, “Design for efficiency optimization and voltage controllability of series–series compensated inductive power transfer systems,” IEEE Trans. Power Electron., Vol. 29, No. 1, pp. 191–200, Jan. 2014. [13] J. Hou, Q. Chen, S. C. Wong, C. K. Tse, and X. Ruan, “Analysis and control of series/series-parallel compensated resonant converter for contactless power transfer,” IEEE Trans. Emerg. Sel. Topics Power Electron., vol. 3, no. 1, pp. 124–136, Mar. 2015. [14] R. Mai, Y. Chen, Y. Li, Y. Zhang, G. Cao, and Z. He, “Inductive Power Transfer for Massive Electric Bicycles Charging Based on Hybrid Topology Switching With a Single Inverter,” IEEE Trans. Power Electron., vol. 32, no. 8, pp. 5897-5906, Jan. 2017. [15] X. Qu, H. Han, S. C. Wong, and C. K. Tse, “Hybrid IPT topologies with constant-current or constant-voltage output for battery charging applications,” IEEE Trans. Power Electron., vol. 30, no. 11, pp. 6129– 6337, Nov. 2015. [16] J. Miller, O. Onar, and M. Chinthavali, “Primary-side power flow control of wireless power transfer for electric vehicle charging,” IEEE J. Emerg. Sel. Topics Power Electron., vol. 3, no. 1, pp. 147–162, Mar. 2015. [17] Z. Li, C. Zhu, J. Jiang, K. Song, and G. Wei, “A 3 kW wireless power transfer system for sightseeing car supercapacitor charge,” IEEE Trans. Power Electron., vol. 32, no. 5, pp. 3301–3316, Jun. 2017. [18] J. Tritschler, S. Reichert, and B. Goeldi, “A practical investigation of a high power, bidirectional charging system for electric vehicles,” in Proc. 16th Eur. Conf. Power Electron. Appl. (EPE-ECCE Europe), Lappeenranta, Finland, 2014, pp. 1–7. [19] G. B. Joung and B. H. Cho, “An energy transmission system for an artificial heart using leakage inductance compensation of transcutaneous transformer,” IEEE Trans. Power Electr., vol. 13, pp. 1013–1022, Nov. 1998. [20] P. Si, A. P. Hu, S. Malpas, and D. Budgett, “A frequency control method for regulating wireless power to implantable devices,” IEEE Trans. Biomed. Circuits Syst., vol. 2, no. 1, pp. 22–29, Mar. 2008. [21] H. Cai, L. Shi, and Y. Li, “Harmonic-based phase-shifted control of inductively coupled power transfer,” IEEE Trans. Power Electron., vol. 29, no. 2, pp. 594–602, Feb. 2014. [22] A. Berger, M. Agostinelli, S. Vesti, J. A. Oliver, J. A. Cobos, and M. Huemer, “A wireless charging system applying phase-shift and amplitude control to maximize efficiency and extractable power,” IEEE Trans. Power Electron., vol. 30, no. 11, pp. 6338–6348, Nov. 2015. [23] U. K. Madawala, M. Neath, and D. J. Thrimawithana, “A powerfrequency controller for bidirectional inductive power transfer systems,” IEEE Trans. Ind. Electron., vol. 60, no. 1, pp. 310–317, Jan. 2013. [3] [24] J. Chow, H. Chung, S, and C. S. Cheng, " Use of Transmitter-Side Electrical Information to Estimate Mutual Inductance and Regulate Receiver-Side Power in Wireless Inductive Link," IEEE Trans. Power Electron., vol. 31, no. 9, pp. 6079 - 6091, Sept. 2016. [25] J. Yin, D. Lin, C. K. Lee, and S. Y. R. Hui, “A Systematic approach for load monitoring and output power control of wireless power transfer systems without any direct output measurement,” IEEE Trans. Power Electron., vol. 30, no. 3, pp. 1657–1667, Mar. 2015. [26] U. K. Madawala, and D. J. Thrimawithana, “New technique for inductive power transfer using a single controller,” IET Power Electron., vol. 5, no. 2, pp. 248–256, Feb. 2012. [27] X. Dai, Y. Sun, C. S. Tang, Z. H. Wang, Y. G. Su, and Y. L. Li, “Dynamic parameters identification method for inductively coupled power transfer system,” in Proc. IEEE Int. Conf. Sustainable Energy Technol., 2010, pp. 1–5 [28] Z. H. Wang, Y. P. Li, Y. Sun, C. S. Tang, and X. Lv, “Load detection model of voltage-fed inductive power transfer system,” IEEE Trans. Power Electron., vol. 28, no. 11, pp. 5233–5243, Nov. 2013. [29] Z. H. Wang, X. Lv, Y. Sun, X. Dai, and Y. P. Li, “A simple approach for load identification in current-fed inductive power transfer system,” in Proc. IEEE Int. Conf. Power Syst. Technol., 2012, pp. 1–5. [30] Y. G. Su, H. Y. Zhang, Z. H. Wang, A. P. Hu, L. Chen, and Y. Sun, “Steady state load identification method of inductive power transfer system based on switching capacitors,” IEEE Trans. Power Electron., vol. 30, no. 11, pp. 6349–6355, Nov. 2015. [31] J. Yin, D. Lin, C. K. Lee, T. Parisini, and S. Hui, “Front-end monitoring of multiple loads in wireless power transfer systems without wireless communication systems,” IEEE Trans. Power Electron., vol. 31, no. 3, pp. 2510–2517, Mar. 2016. [32] G. Guidi, and J. Suul. “Minimizing Converter Requirements of Inductive Power Transfer Systems with Constant Voltage Load and Variable Coupling Conditions,” IEEE Trans. Ind. Electron., vol. 63, no. 11, pp. 6835–6844, Jun. 2016. [33] R. Bosshard et al., “Modeling and η-α-pareto optimization of inductive power transfer coils for electric vehicles,” IEEE J. Emerg. Sel. Topics Power Electron., vol. 3, no. 1, pp. 50–64, Mar. 2015. [34] L. Steigerwald, “A comparison of half-bridge resonant converter topologies,” IEEE Trans. Power Electron., vol. 3, no. 2, pp. 174-182, Apr. 1988. [35] T. Kim, S. Lee, and W. Choi, “Design and control of the phase shift full bridge converter for the on-board battery charger of the electric forklift,” in Proc. IEEE ICPE-ECCE Asia, 2011, pp. 2709–2716. [36] H. Zeng, S. Vu, Yang. Li, and F. Peng. “Design Consideration and Comparison of Wireless Power Transfer via Harmonic Current for PHEV and EV Wireless Charging,” IEEE Trans. Power Electron., vol. 32, no. 8, pp. 5943–5952, Aug. 2017. [37] D.M. Kuslevic, J.J. Tomic, D.Pcetic, "Active power measurement algorithm for power system signals under non-sinusoidal conditions and wide-range frequency deviations", IET Gen. Trans. Distr., Vol. 3, No. I, pp. 57-65, 2009. [38] C. Peniescu, "Digital measurement of active and reactive power," IEEE Trans. Power Apparatus and Systems., vol. PAS-84, PP. 609-621, July. 1965 [39] M. Valkama and M. Renfors, “A novel image rejection architecture for quadrature radio receivers,” IEEE Trans. Circuits Syst. II, Exp. Briefs., vol. 51, no. 2, pp. 61–68, 2004. [40] J. Yin, D. Lin, T. Parisini, and S. Hui, “Front-End Monitoring of the Mutual Inductance and Load Resistance in a Series–Series Compensated Wireless Power Transfer System,” IEEE Trans. Power Electron., vol. 31, no. 10, pp. 7339-7352, Oct. 2016. [41] J.-R. Sibue et al., “A global study of a contactless energy transfer system: Analytical design, virtual prototyping, and experimental validation,” IEEE Trans. Power Electron., vol. 28, no. 10, pp. 4490–4698, Oct. 2013. [42] L. Grajales and F. C. Lee, “Design of a 10 kW, 500 kHz phase-shift controlled series-resonant inverter for induction heating,” in Proc. IEEE Ind. Applicat. Soc. Annu. Meeting, 1993, pp. 843–849. [43] Z. Huang, S. C. Wong, and C. K. Tse, “Design of a Single-Stage Inductive-Power-Transfer Converter for Efficient EV Battery Charging,” IEEE Trans. Veh. Technol., vol. PP, no. 99, pp. 1–1, Nov. 2016. [44] X. Qu, H. Han, S. C. Wong, and C. K. Tse, “Hybrid IPT topologies with constant-current or constant-voltage output for battery charging 0885-8993 (c) 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TPEL.2017.2767099, IEEE Transactions on Power Electronics 16 applications,” IEEE Trans. Power Electron., vol. 30, no. 11, pp. 6129– 6337, Nov. 2015. [45] C. Zheng, J. Lai, R. Chen, W. E. Faraci, Z. U. Zahid, B. Gu, and L. Zhang, “High-Efficiency contactless power transfer system for electric vehicle battery charging application,” IEEE J. Emerging Sel. Topics Power Electron., vol. 30, no. 5, pp. 2743–2752, May 2015. [46] Y. Hsieh, Z. Lin, M. Chen, H. Hsieh, Y. Liu, and H. Chiu, “HighEfficiency Wireless Power Transfer System for Electric Vehicle Applications,” IEEE Trans. Circuits Syst. II, Exp. Briefs., vol. 64, no. 8, pp. 942–946, Aug 2017. [47] J. Hou, Q. Chen, S. C. Wong, C. K. Tse, and X. Ruan, “Analysis and control of series/series-parallel compensated resonant converters for contactless power transfer,” IEEE J. Emerg. Sel. Topics Power Electron., vol. 3, no. 1, pp. 124–136, Mar. 2015 Chunbo Zhu (M’05) received the B.S. and M.S. degrees in electrical engineering and the Ph.D. degree in mechanical engineering from the Harbin Institute of Technology (HIT), Harbin, China, in 1987, 1992, and 2001, respectively. He was a Post-Doctoral Research Fellow with the PEI Research Center, National University of Ireland, Galway, Ireland, from 2003 to 2004. He has been a Lecturer with the Department of Automation Measurement and Control, HIT, since 1987. He is currently a Full Professor with HIT, where he leads the Laboratory of Wireless Power Transfer and Battery Management Technologies. His current research interests include energy management systems, electric and hybrid electric vehicles, and wireless power transfer technologies. Kai Song (M’12) received the B.S., M.S. and Ph.D. degree in instrument science and technology from the Harbin Institute of Technology (HIT), Harbin, China, in 2005, 2007 and 2011, respectively. In 2011, he joined the School of Electrical Engineering and Automation, HIT, as a lecturer, and was a visiting scholar in electrical engineering, The University of Tokyo, Japan, from 2014 to 2015. He is currently an associate professor with the School of Electrical Engineering and Automation, HIT, since 2016. His current research interests concentrate in wireless power transfer, particularly in the high-power wireless power transfer system for electric vehicles and robots. Zhenjie Li received the B.S. degrees in the school of measurement and control technology and communication engineering from Harbin University of Science and Technology, Harbin, China in 2012, and M.S. degrees in the school of electrical engineering & automation from Harbin Institute of Technology, Harbin, China in 2014, where he is currently working toward Ph.D. degree. His research interests include wireless power transfer for supercapacitor and battery powered electric vehicles. Jinhai Jiang received the B.S. degrees in school of Electronic Science from Northeast Petroleum University, Daqing, China in 2010, and M.S. degrees in school of electrical engineering & information from Northeast Petroleum University, Daqing, China in 2013. He is currently working toward Ph.D. degree at Harbin Institute of Technology. His research interests include wireless power transfer for supercapacitor and battery powered on-line electric vehicles. 0885-8993 (c) 2017 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.