Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Mathematics of radio engineering wikipedia , lookup
Stepper motor wikipedia , lookup
History of electromagnetic theory wikipedia , lookup
Transformer wikipedia , lookup
Induction motor wikipedia , lookup
Alternating current wikipedia , lookup
Skin effect wikipedia , lookup
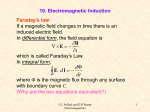
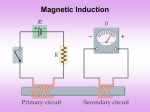
TRANSACTIONS ON ELECTRICAL AND ELECTRONIC MATERIALS Vol. 18, No. 2, pp. 97-102, April 25, 2017 pISSN: 1229-7607 eISSN: 2092-7592 DOI: https://doi.org/10.4313/TEEM.2017.18.2.97 OAK Central: http://central.oak.go.kr Magnetic Saturation Effect of the Iron Core in Current Transformers Under Lightning Flow Young Sun Kim Department of Electrical and Electronic Engineering, Joongbu University, Goyang 10279, Korea Received January 17, 2017; Revised January 21, 2017; Accepted January 31, 2017 A current transformer (CT) is a type of sensor that consists of a combination of electric and magnetic circuits, and it measures large ac currents. When a large amount of current flows into the primary winding, the alternating magnetic flux in the iron core induces an electromotive force in the secondary winding. The characteristics of a CT are determined by the iron core design because the iron core is saturated above a certain magnetic flux density. In particular, when a large current, such as a current surge, is input into a CT, the iron core becomes saturated and the induced electromotive force in the secondary winding fluctuates severely. Under these conditions, the CT no longer functions as a sensor. In this study, the characteristics of the secondary winding were investigated using the timedifference finite element method when a current surge was provided as an input. The CT was modeled as a twodimensional analysis object using constraints, and the saturation characteristics of the iron core were evaluated using the Newton-Rhapson method. The results of the calculation were compared with the experimental data. The results of this study will prove useful in the designs of the iron core and the windings of CTs. Keywords: Current transformer, Iron core, Electromotive force, Surge, Finite element method, Fourier series 1. INTRODUCTION magnetic field analysis was conducted while considering the magnetic nonlinearity of the iron core. Furthermore, the area in which the induced electromotive force was generated was regarded as a winding using the variation of the electric scalar potential as a constraint condition. To express the surge current as a function, the amplitude of the frequency harmonics was extracted through the development of the 8/20 μs waveform of the standard surge wave as a Fourier series and its application to the surge analysis [3-6]. In the surge current analysis, 1,000 A and 5,000 A were applied as input currents to the primary winding of the CT before the magnetic core became saturated, and 50,000 A was also applied, at which point the magnetic core became saturated [7,8]. An experiment was conducted using three through type CTs, and the results were compared with those from the numerical analysis. At 1,000 A and 5,000 A before the saturation, the shapes of the induced electromotive forces are similar. At 50,000 A, only the numerical analysis results could be evaluated because the experiment could not be conducted. The proposed algorithm will be useful for the design of CTs in accordance with their use and purpose while the characteristics of the electromotive power characteristics are considered. A current transformer (CT ) is composed of a primary winding through which the current flows, a magnetic core, and a secondary winding in which an induced electromotive force is generated. In addition, a CT has electric and magnetic currents that induce an electromotive force in the secondary winding. When a surge, such as an inrush current, is input into the primary winding of the CT, the magnetic core becomes saturated and the magnetic flux density no longer increases. This distorts the induced electromotive force of the secondary winding and causes the malfunction and time delay of the device [1-3]. A two-dimensional magnetostatic field analysis was conducted using the time difference finite element method, and the results were compared with the experiment results. The Author to whom all correspondence should be addressed: E-mail: [email protected] Copyright ©2017 KIEEME. All rights reserved. This is an open-access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted noncommercial use, distribution, and reproduction in any medium, provided the original work is properly cited. 97 http://www.transeem.org analysis region, aequation current (eddy current) is induced in field it by 2.1 Governing for the electromagnetic andIn the of the currents be analysis, zero. Therefore, the the sum two-dimensional finite must element the induced temporal in the and theisdirection of the When achanges conductor ormagnetic magneticfield, substance present in following constraint, Eq.of(3), is windings introduced: current region consists two in opposite directions, magnetic field generated by (eddy the current is opposite to that of the analysis region, a current current) is induced in it by 22 ): G.-D. Hong et al. and the sum of the currentsA must be zero. Therefore, the original field. relationship between the magnetic temporalmagnetic changes in the The magnetic field, and the direction of the 22 ): G.-D. Hong et al. following J constraint, Eq.(3), (3) ds 0 . is introduced: i ds 22current ): G.-D. Hong et al. flux and the induced current when the magnetic flux magnetic field generated by the is opposite to for thataoftwothe s s t A dimensional field changes over time is shown in Fig.the 1. magnetic original magnetic field. The relationship between . (3) ds 0 J ds i flux and the induced current when the magnetic flux for a twos s t In the above equation, the gradient of the electric scalar constraints, the calculation dimensional field changes over time is shown in Fig. 1. of the induced electromotive force, potential can be expressed and the Fourier are explained. constraints, the series calculation of the induced electromotive force, as follows: Trans. Electr. Electron. Mater. 18(2) 97 (2017): Y. S. Kim 98 2.2 Constraints thescalar induced current in the constraints, the calculation of the induced force, the gradient of the electric In electromotive the above1 equation, 22the Fourier ): G.-D. Hong et al. A 2.2 Constraints on and series are explained. and the Fourier series are explained. potential on the (4) induced current in the .2.2 Constraints can be expressedds assecondary follows: coil on the induced current in the s t 2.1 Governing equation for the electromagnetic S1 field In the two-dimensional finite element):analysis, the induced coil A secondary 22 2.1 G.-D. Hong et al. coil When a conductor or magnetic in the Governing equation for thesubstance electromagnetic the sum ofofthe currents must bethe zero. Therefore, the following .secondary (4) is present field consists two windings opposite directions, 2.1 Governing equation for the electromagnetic field dscurrent Inand theregion two-dimensional finite elementin analysis, induced Intwo-dimensional the two-dimensional finiteiselement analysis, the induced s the analysis a current (eddy current) is induced in init by When region, a conductor or magnetic substance is present When the constraint of the winding S t and the sum of the currents must be zero. Therefore, When a conductor or magnetic substance is present in the current region consists of two windings in opposite directions, constraint, eq. (3), is introduced: 22 region, ): G.-D. directions, Hongthe et al. current region consists of and two the windings in opposite temporal changes incurrent the magnetic field, andisthe direction ofitforce, the analysis (eddy current) induced by constraints, the acalculation of the induced electromotive substituted in theinin governing equation, ∇φ is constraint, (3), is introduced: analysis region, a current (eddy current) is induced it by following and the sum ofeliminated theEq.currents must be zero. Therefore, the The magneticmagnetic saturation and induced electromotive force and the sum of the currents must be zero. Therefore, the field generated byexplained. the current is opposite to that of the temporal changes in theare magnetic field, and the direction and the Fourier series When the constraint of the two-dimensional winding is governing equationofof time-varying fieldEq. becomes asinduced current in the temporal changes in the magnetic field, and the direction thethefollowing constraint, (3), the isintroduced: 2.2 Constraints on A following∇φ constraint, Eq. (3), introduced: field. The relationship between the magnetic magnetic field generated by current iselectromotive opposite to analyzed that of the characteristicsconstraints, oforiginal a CTmagnetic when a surge is an input were substituted in governing is eliminated andis the follows: the calculation ofbythe the force, magnetic field generated theinduced current is opposite tothe that of the equation, . (3) ds 0 J ds (3) i coil secondary A the induced current the magnetic for a twooriginal magnetic field. The when relationship betweenflux the magnetic s sbecomes Aelement andflux the Fourier serieselement are explained. governing equation of the time-varying field 2.1and Governing equation for the electromagnetic field tas original magnetic field. Themethod. relationship between the magnetic using the time difference finite In this section, the2.2 finite ds (3) the current 00.inthe Jtwo-dimensional on Constraints induced the In the analysis, induced i ds . (3) dimensional field changes over time is shown in Fig. 1. ds J ds fluxconstraints, and the induced current when the magnetic flux for a two s s i the calculation of thethe induced electromotive force, follows: When a conductor or magnetic substance is1flux present theA s A twindings flux and the induced current when magnetic for aintwoAnalysis model (x-z plane) in opposite directions, governinga)equation for the electromagnetic field, constraints, current region consistss of two t dimensional field changes over time is shownthe in Fig. 1. 2 A coil ds In2.2 theJequation, . (5) and theregion, Fourier series are explained. analysis achanges current (eddy current) in itbysecondary field over time is shownis ininduced Fig.1.field s currents the above equation, gradient of the current electric scalar 2.1 dimensional Governing equation for the electromagnetic onthethe induced in electric the In the above theanalysis, gradient of the scalar potential and the sum of must be zero. Therefore, the s Constraints In the two-dimensional finite element the induced t S t the calculation of the induced electromotive force, and the Fourier temporal changes in magnetic field, and of theApotential a) AnalysisWhen model plane) be expressed as follows: Inthe can above equation, the of the electric scalar a(x-z conductor or the magnetic substance is the present above A 1direction following constraint, Eq. (3), isgradient introduced: 2in the In the equation, the gradient of the electric scalar current region consists of two windings in opposite directions, secondary coil can be expressed as follows: A ds J . (5) magnetic fielda generated by thecurrent) current is opposite offield the potential can be expressed series are explained. follows: analysis current (eddy induced to in that it by 2.1region, Governing equation for the is electromagnetic As asas 1theexpressed sthe be follows: and theSInsum currents zero. analysis, Therefore,thethe finite induced t potential of ttwo-dimensional is the Abeelement . must original magnetic The relationship between (4)(3) can ds temporal changes in thefield. magnetic field, and the direction ofmagnetic the in finite When a conductor or magnetic substance present the element indsopposite 0 . directions, Janalysis (3), 1ds A 2.3 Time difference following constraint, Eq. is introduced: current region consists of s i S 1 A flux and the induced current when the magnetic flux for a twots ds.twotwindings s (4) magnetic field generated the current oppositeistoinduced that of the analysis region, a by current (eddy iscurrent) in it by . t must be zero. Therefore,(4)the (4) S of sum ds and the the currents The method offield discretizing the time derivative term ∂A/∂ s dimensional field changes over time is shown in Fig. 1. 2.1 Governing equation for the electromagnetic A original magnetic field. in Thetherelationship between magnetic of the temporal changes magnetic field, and the direction S stEq. t method following constraint, (3), is introduced: 2.3 Time difference finiteinWhen element analysis . (3) ds 0 ds based on the time difference Eq.J(5) is a calculation ithe constraint of the two-dimensional winding is flux and the induced current when thecurrent magnetic flux for to a twomagnetic field generated by the is opposite that of the s s In the above equation, the the electric scalar the t begradient method discretizing the time derivative ∂A/∂ term ofeliminated thatThedivides theoftemporal change ofthe the phenomenon to When constraint of equation, two-dimensional winding is t A ∇φ substituted in the governing and the two-dimensional dimensional field changesfield. oversubstance timerelationship is shown is in between Fig. 1. thein original magnetic The magnetic When the constraint of the is When a conductor or magnetic the micro-time potential can expressed as follows: the ofisthe winding is method winding 0 .and the dsit discretizes governing constraint the two-dimensional based present on by thethe time difference in Eq.When (5)axis, isJabe analyzed and time-varying ds becomes i calculation substituted in ∇φ isfield eliminated equation of the as (3) flux and the induced current when the magnetic flux△t forofa the two- governing s inthe s equation, substituted the governing equation, ∇φ is eliminated and the t that in divides the temporal change of the phenomenon to be In the above equation, the gradient of the electric scalar 1 A differential equation under the assumption that the phenomenon analysis region, a current (eddy current) is induced it by temporal ∇φ substituted in the governing equation, is follows: governing equation of thedstime-varying field becomes as(4) eliminated and the dimensional field changes over time is shown in Fig. 1. . governing of the time-varying field becomes as potential canaxis, be equation expressed as follows: analyzed by the △t of the micro-time and itmethod changes linearly within each time segment. This sdiscretizes follows: changes in the magnetic field, and the direction of the magnetic governing of the the time-varying field becomes as follows: t enables Sequation In thesolutions. the adifferential nonlinear equation analysis including transient However, this gradient of the electric scalar under thefollows: assumption that the phenomenon 1above Aequation, model (x-z A A 1 field generated by the currenta)isAnalysis opposite to plane) that of the original 2 be . enables (4)(5) potential segment. can as follows: ds J . method several disadvantages, asThis a long changes has linearly within each time method such A expressed dscalculation s When of the is a) Analysis model (x-z plane) s winding A 1the Stwo-dimensional s a) Analysis model time, and flux the accuracy solution onthis the a plane) nonlinear analysis A 1Sis2constraint magnetic field. The relationship between the (x-z magnetic andincluding theof thetransient tA ∇φ tAds 1governing 2dependent solutions. A tHowever, JJs . . and(5)(5) A (5) substituted in the equation, is eliminated the(4) A ds .S s t ds s has several disadvantages, such as a long calculation method regarding the selection of △t. t b) Eddy current and distribution of the magnetic flux induced current when the magnetic flux for a two-dimensional field When the t time-varying S s t fieldwinding governing equation oftthe becomes S sof the constraint is as time, and the accuracy of the solution is dependent on two-dimensional the follows: changesfluxover time is shownvarying in Fig. 1. substituted the governing equation, ∇φ is eliminated and the 2.3 finite method regarding ofTime △t.in t tthe selection t difference t t t element analysis Fig. 1. Magnetic and eddy current in time fields. b) Eddy current and distribution of the magnetic flux Time AWhen Aof constraint A time-varying the ofelement the two-dimensional A a time-governing The equation ofthe field becomes as t is 2.3 difference finite method discretizing derivative termwinding ∂A/∂ When a current density Js is given in an analysisregion, , the (6) time analysis ( 1 ) 2.3 Time difference finite element analysis substituted inoft2the governing equation, ∇φ iselement eliminated and a) Analysis model (x-z plane) follows: A A 1 a current density J is given in an analysis region, a The method discretizing the time derivative term ∂A/∂ t the t t t based on the time difference in Eq. (5) is a calculation method 2.3 Time difference finite analysis s t t Fig.When 1.varying Magnetic flux and eddy current in time varying fields. t t t field is formed by the temporal change in the current, and The method ofAdiscretizing time derivative equation the dsfield J term . ∂A/∂ (5)t A Aon A Aof change governing the time-varying s becomes time-varying field is formed by the temporal change in the that divides the temporal of to be as based the time difference (5)sthe isatphenomenon calculation method ,ininEq. (6) magnetic ( 1 ) t S based on the time difference Eq. (5) is a calculation method the induced current flows are due to the effect of this field, t follows: 1by the current, the induced flows in areandue to the region, effect (x-z ofa plane) When and a current densitycurrent Js is given a)analysis Analysis model that the △t temporal change the and phenomenon to the be A of A 1. If of analyzed micro-time axis, it discretizes divides t The 2range where βgenerally has values within the ofoft0the ≤ βdiscretizing that the to be term ∂A/∂t based on method of the time divides equation Athe△t temporal ≤change ds phenomenon J sdiscretizes . derivative (5) this magnetic field, as shown inby the the following Eq. change (1): time-varying fieldin is the formed temporal in the as shown following eq. (1): analyzed by the of the micro-time and it the differential under the assumption that the phenomenon β = 0, this equation is called the forward-difference method; s axis, analyzed by the △t ofthe micro-time axis, and it discretizes the t S t current, and the induced current flows are due to a)the effect model of (x-z the time in eq. (5) isthat aAcalculation method that divides the Analysis plane) if β = 1, it is calledchanges ≤ A 1difference linearly within each time segment. This method enables equation assumption the phenomenon 2.3 Time difference finite element analysis 2ofunder however, the backward-difference where β generally has valuesdifferential within the range 0 ≤method. βthe 1.assumption If differential equation under the that thephenomenon analysis A J senables . this (5) this magnetic field, asshown achanges nonlinear including transient solutions. However, linearly within each time segment. Thisds method A in the following Eq. (1): Theforward-difference method of discretizing the time ∂A/∂t temporal change ofmethod; the phenomenon toterm beenables analyzed by the △t of the When is reorganized using the backward-difference s derivative β = 0, Eq. this (5) equation is called the changes linearly within each time segment. This method t S t (1) J e . (1) method has several disadvantages, such as long calculation athe nonlinear analysis including transient solutions. However, this method as abackward-difference matrix equation, Eq. (7) is on the timeaxis, difference in Eq. (5) is aa calculation method however,and if β =is 1,expressed it is called method. 2.3 Time difference finite element analysis abased nonlinear analysis including transient solutions. However, this micro-time and it discretizes the differential equation under t time, and theseveral accuracy of the solution is adependent on thebe method hasthe disadvantages, such as long calculation A obtained. can find ausing solution inseveral the time domain by that divides the temporal change ofderivative the When Eq.This (5)method is reorganized backward-difference method has of disadvantages, as phenomenon a long The method discretizing the time such termcalculation ∂A/∂to t The magnetic (1) J e field generated by. the induced current density the assumption that the phenomenon changes linearly within time, and the accuracy of the solution is dependent on the method regarding the selection of △t. performing repeated calculations while increasing the time. andflux is expressedbased a2.3 equation, (7) analyzed bythe the △t of Eq. thein micro-time and it discretizes b) Eddy current and distribution the magnetic Time difference finite element time, and accuracy of the is solution isanalysis dependent on the onmatrix the time difference Eq. (5) is axis, a calculation method t field combinesThe with the original to form a combined field. the of method magnetic field generated by theIf induced current density as method regarding selection △t. method time segment. a nonlinear analysis This find aeach solution intemporal thethe time domain by b) Eddy current and distribution the magnetic fluxmethod canthat differential equation under theofThis assumption that theenables phenomenon The method of discretizing derivative term t divides the change ofthe thetime phenomenon to be ∂A/∂ method regarding the selection of △t. displacement current ignored, the governing equation of the ofofobtained. The magnetic fieldisgenerated by the current density b) induced Eddy current and distribution the magnetic flux If the combines with the original field field. t t t t t changes t t t t Fig. 1. Magnetic flux and to eddyform currentain combined timeperforming varying fields. repeated calculations while increasing the time. linearly within each time segment. This method enables based on the time difference in Eq. (5) is a calculation method the △t of the micro-time axis, and it discretizes the transient solutions. However, this method has several time varying field be expressed by thea following (2)If: the [S C]{A} analyzed {including F }by [ C ]{ A } combines with thecan original field to form combined Eq. field. , (7) A A A A analysis transient t solutions. t t (including t phenomenon t t Fig. 1. Magnetic flux and eddy current in time varying fields. a nonlinear thisbe (6) divides 1such ) as theassumption displacement ignored, the governing equation of the timedifferential that change the to t the under t temporal tof equation that the t phenomenon tHowever, displacement current is current ignored, governing of the in time Fig. the 1.isMagnetic fluxequation and eddy varying fields. A Acalculation AA t, time, A disadvantages, a long and the accuracy of where, When a current density Jscurrent is given in an analysis region, at t method t A A A t t t several asmethod aand long calculation ]{ , (6) the (1disadvantages, time This analyzed the}△t the axis, it discretizes each segment. enables time varying can be expressed by the following Eq. (2) : the eq. S region, C]{ }a changes {F }linearly [has Cby A , (7) such varying can expressed bydensity following (2)analysis : [change , (6) and (1of )micro-time )the within AWhen 1fieldfield time-varying field isthe formed temporal in A the a current J isbygiven in an be the solution is dependent method regarding the selection of tNtthe t the analysis jequation tassumption on the time, accuracy of solution is that dependent on the aaNnonlinear When a current density sJs is(2)given in ane analysis region, N N 1 including transient solutions. However, this differential under the phenomenon j 2 A current, J t t . i i where, s is formed and the induced current areSdue tochange the effect of time-varying field byflows the temporal △t. method regarding the selection ofsuch △t. where β generally has values within the of calculation 0 method ≤ β ≤ 1.enables If time-varying field is formed by theoftemporal change themethod ininxthe dxdy t magnetic 1 A has several disadvantages, asrange a long changes linearly within each time segment. This b) current and distribution the ijmagnetic this Eddy effect field, as shown in theflows following Eq.to(1): current, and the induced current are due of Nxβ = 0,y y analysis theflux N hasisof equation called thetransient forward-difference current, and the induced current flows are due to1the effect oftime, where βthis generally values theisrange of 0 ≤However, βmethod; ≤ 1. Ifthis N N and the accuracy the within solution dependent a nonlinear solutions. e j j 2 A this J . (2) (2) i i where β generally has including values within the range of 0 ≤onβ the ≤ 1. If s as shown in the following magnetic field, Eq.(1): S dxdy it selection t is is t such ast however, if βhas = the 1, called the△t. backward-difference method. field, as shown in theinfollowing (1): β = method 0, this equation called the forward-difference method; ij Eq.fields. t long t 1. flux and and eddy current time varying tseveral tFig. magnetic method of this current b)Magnetic Eddy β = regarding isdisadvantages, called the method; Ay=equation Asolution Ais adependent method. Acalculation y this 0,Eq. β(5) the backward-difference forward-difference Adistribution of the magnetic flux x xWhen is itreorganized the however, 1, is called time, ofthe the , on(6)the (6) ifand 1 the ) using backward-difference however, if β = 1, accuracy itis(called backward-difference method. . (1) J e A When a flux current density Js in is time given in anfields. analysis region, a method and ist isexpressed as ausing (7) is When Eq. reorganized the equation, backward-difference matrix t △t. t Eq. method the selection t(5) t(5) tof regarding t t Fig. 1. Magnetic eddy tAcurrent Eddy current and distribution of the magnetic flux (1) When Eq. is reorganized using thet backward-difference . varying JJe b) and A A A A time-varying field is formed by the temporal change in the This ismethod asasaa solution field tgenerated by .the induced current density(1) obtained. can find the time Eq. domain method expressed matrix in equation, (7) by is e The magnetic method and is expressed a matrix equation, Eq. (7) is , (6) and (1 can )find increasing tJseddy current, and the flux induced current flows are due tofields. the effect of performing repeated while the time. generally find asolution obtained. method thet time by If current is given inin an analysis region, t calculations t can t inrange (a) When t of time t0domain Fig. Magnetic and current time varying where has values the ≤domain β ≤t 1. combines with thedensity original field tobyform ainduced combined field.density If athe βt This tawithin Thea1.magnetic field generated the current obtained. This method solution inthe by β where generally has values within the range of 0 ≤ β ≤ 1. If β= 0, this The magnetic field generated by the induced current density A A A A this magnetic field, as shown in the following Eq. (1): performing calculations while increasing the time.method; time-varying field formed by the temporal change in of the β = 0, thisrepeated equation is(1called the forward-difference displacement current is ignored, governing equation combines with theisoriginal field tothe form a combined field. If the performing repeated calculations while increasing the time. , (6) ) combines with the original field to form a combined field. If the equation is called the forward-difference method; however, if β= 1, t t t ifβtC 1, backward-difference ]{A} , t method. current, and theafield induced current flows are the effect of When current density Js the isby given in to anequation analysis region, a however, = it is called the time varying can is be expressed thedue following Eq. (2) : the where t displacement current ignored, governing of [ S ]{ A } { F } [ C (7) β generally has values ≤ β ≤ 1. If displacement current ignored, the the governing of the t t within the range of t0 method. thistime magnetic field, shown in the following Eq. (1):equation time-varying field formed by temporal change isisAexpressed it is called the backward-difference When Eq. (5) is reorganized using the backward-difference t t t varying fieldas can be by the following Eq. (2) : in the [ S C ]{ A } { F } [ C ]{ A } , (7) 0, this equation is A called forward-difference time varying be expressed the are following : (1)βof=where, Jand the can current .by [S isCexpressed ]{ } the {F }matrix [C]{equation, A} , method; (7) e field current, induced flows due toEq. the(2) effect method as awithin When (5) is reorganized using however, if ββand = generally 1, iteq. is called backward-difference method. where has the values the range of 0Eq. ≤the β(7) ≤ backward-difference 1.is If where, A in the following 1 2field, ast shown where, N N this magnetic Eq. (1): N N 1 obtained. This method can find a solution in the time domain by e A j j A J . (2) i is called i forward-difference WhenS (5) reorganized using the backward-difference βEq. = 0, thisisand equation the method; s The magnetic field generated by the induced current density A 1 method is expressed as a matrix equation, eq. (7) is obtained. dxdy 2 (1) J e1 A as N tA. toform ij e Eq. field Js . 11ifrepeated 1, N performing while the time. and is expressed (7)method. is i is however, β = itcalculations called the N combines themethod N Ni i equation, xNjajmatrix ybackward-difference yNj j dxdy Nxcan increasing e with the2A acombined J s . field. If(2) (2) toriginal SThis t i find method a solution in the time domain by performing ij A S dxdy obtained. can find a solution in domain by When is reorganized thetime backward-difference (5) ijThisEq. displacement current the equation of the(1) tthe method yusing ythe by current The magnetic density . governing Jefield generated is ignored, induced iscalculations equation, x }t xxt while ymatrix calculations xA ]{expressed performing repeated the method as Eq.time. (7) repeated time varying can be the following [Sand C {while Fa}increasing [increasing Cy]{A }t ,time.the (7) is texpressed combines with thefield original field to formby a combined field.Eq. If (2) the : obtained. This method can find a solution in the time domain by displacement is field ignored, the governing equation of thedensity where, The current magnetic generated by the induced current t performing repeated while increasing the time. (7) time varying field be expressed by the following Eq. (2) : combines with original field to form a combined field. If the [S C]{A}t calculations {F} [C ]{A}t , (7) A 1 canthe 2 1 Ni N j Ni N j e current A is ignored, J s . equation of(2)the displacement the governing where, S dxdy t t t ij field can beexpressed t time varying bythe following Eq. (2) : C]{xA}x {F (7) y ]{ A} , y} [C A 1 where, [S 2. MATHEMATICAL MODELING (b) 2 A J s . 1 t A 2 A J s . t (2) 1 N N j Ni N j e Sij where, dxdy i e 1 x Nx Ny Ny N j j (2) i i Sij dxdy x x y y Cije Ni N j dxdy Cij t Ni N j dxdy t e Fie Ni J s dxdy . Fe i Ni J s dxdy . Cij Ni N j dxdy t force 2.4 Electromotive e Electromotive Fig. 2, the linkage flux inside the core that is induced by force 2.4In F Fig. dxdy . expressed i J slinkage 2,Ncurrent theiInprimary can be using vector the flux inside the corethe thatmagnetic is induced by e Fig. 1. Magnetic flux and eddy current in time varying fields. (a) Analysis model (x-z plane) and (b) eddy current and distribution of the magnetic flux. 2.2 Constraints on the induced current in the secondary coil In the two-dimensional finite element analysis, the induced current region consists of two windings in opposite directions, N t t Ea l N j Aat Aat S Ea l a j Aa Aa Sa . . 2.5 Fourier series expansion for the N t t Fourierseries series for a randomfor 2.5The the . period j Aexpansion EFourier a l a Aa S a equation The Fourier series for that a random periodth develop an describes follows: an equation that describes th develop follows: 2.5 Fourier series expansion for the su 2.4 Electromotive force the primary potential, as current follows:can be expressed using the magnetic vector f ( x) a (an cosperiodic nx bf The Fourier series0 for a random potential, as follows: f ( x) a0 nthat 1 ( an cos nx bn develop an equation describes the 2.4 Electromotive force n 1 In Fig. 2, the flux linkage the flux inside the core thatwhere is induced a0 denotes by the magnitude of the dc c In Fig.2,the Nlinkage B( x, y)inside ds core N that A(isx,induced y) dl ,by (8) follows: where the magnitude the cosin dc c bn are athe coefficients of the sineofand 0 denotes scurrent coil primary can be expressed using the magnetic vector thethe primary current can be expressed using the magnetic vector N B( x, y) ds N A( x, y) dl , (8) bFigure coefficients of the and cosin 3)shows the 8/20 μcos ssine standard surg n are the s where as B is the magnetic flux density of coil the core, A denotes the potential, follows: f ( x a ( a nx b potential, as follows: n si Figure 3 shows 8/20 nμThis s standard were used in 0thethe testing. means surg that where B isvector the magnetic density of the core, A the magnetic potentialflux of the winding region, anddenotes ± denotes n 1 were used current in the testing. means thati magnetic vector of thecurrent windinginregion, and ± denotes where the direction ofpotential the induced the two-dimensional the asurge reachesThis its maximum 0 denotes the magnitude of the dc com direction N ofB(the x, yinduced ) ds current N inAthe ( x, two-dimensional y) dl , (8) b are the analysis. the surge current reaches its maximum (8) point when it becomes halfsine of the the coefficients of the andmaximum cosine is t n s coil analysis. point3when it becomes of the maximum Figure shows the 8/20 half μs standard surge where B is the magnetic flux density of the core, A denotes the wereAused in the testing. magnetic of the winding and ±of denotes wherevector B ispotential the magnetic fluxregion, density the core, denotes the This means that th the direction of the induced current in the two-dimensional the surge current reaches its maximum is 8 magnetic vector potential of the winding region, and ± denotes the analysis. point when it becomes half of the maximum is direction of the induced current in the two-dimensional analysis. Cij e E l N t Ni NNj dxdy B( x, y) ds N A( x, y)a dl S,a t t (11) of the dc component, and an and j Aa where Aa . a0 denotes the magnitude (8) bn are the coefficients of the sine and cosine terms, respectively. e N t t e F Ni isJ N dxdy . Figure i B s the . 3 shows the 8/20 (11) μs standard surge current waves that j A Aafor E l where magnetic flux density of the core, A denotes the C N dxdy a a ij the surge inflow 2.5 Fourier series t i j S a expansion were used function in the istesting. magnetic vector potential of the winding region,The and ± denotes Fourier series for a random periodic used to This means that the time point when e develop an equation that the describes surge current, as its maximum is 8 μs, and the time Electromotive 2.4F J s force dxdy . the of the induced current in the two-dimensional surgethe current reaches i direction theNilinkage follows: 2.5 Fourier series expansion for the surge inflow In Fig. 2,Trans. flux Electron. inside the core that is18(2) induced Electr. Mater. 97by(2017): Y. S. Kim analysis. 99 point when it becomes half The Fourier series for a random periodic function is used to of the maximum is 20 μs. the primary current can be expressed using the magnetic vector develop describes surge current,(12) as potential, as follows: force f ( xan ) equation a0 (that an cos nx bthe 2.4 Electromotive n sin nx) , s coil In Fig. 2, the linkage flux inside the core that is induced by the primary current can be expressed using the magnetic vector as N B( x, y) ds N A( x, y) dl , (8) potential, follows: s coil where B is the magnetic flux density of the core, A denotes the magnetic vector potential of the winding region, and ± denotes N B( x, y) ds N A( x, y) dl , (8) the direction of sthe induced current incoil the two-dimensional analysis. where B is the magnetic flux density of the core, A denotes the magnetic vector potential of the winding region, and ± denotes the direction of the induced current in the two-dimensional analysis. follows: n 1 Table the harmonics for a lighting surge with the where a0 denotes the magnitude of the 1. dc Coefficients component, and aof n and f (coefficients x) a0 of the (ansine cosand nxcosine A bmaximum nxrespectively. ) , current (12) (type: 8/20 μs). bn are the terms, 50,000 n sin n 1 μs standard surge current waves that Figure 3 shows the 8/20 Sine Cosine whereused a0 denotes magnitude of the that dc component, and awhen were in the the testing. This means the time point n and bn are the current coefficients of the and Order cosine respectively. Coefficients Order Coefficients μs, and the time the surge reaches itssine maximum is 8terms, Figure 3 shows the 8/20 standard surge that point when it becomes half μofs the maximum 20 μs. waves20,870 a1 iscurrent b1 -6,330 were used in the testing. This means that the time point when 3,280 b2 -6,530 a the surge current reaches its maximum 2is 8 μs, and the time a3 is 20 μs. 340 b3 -3,700 point when it becomes half of the maximum a4 -265 b4 -1,300 a5 -140 b5 -800 a6 -60 b6 -605 a7 -145 b7 -445 a8 -120 b8 -245 a9 80 wave used in the b9 numerical analysis -180 (8/20 Fig. 3. Standard surge current a 0 b -155 10 10 μs). Fig. 2. Schematic diagram of the magnetic flux linkage to the Fig. 2. Schematic diagram of the magnetic flux linkage to the secondary secondary winding to calculate the induced voltage. Fig. 3. Standard surge current wave used in the numerical analysis (8/20 winding to calculate the induced voltage. For the harmonic analysis of the surge waveform, the Fourier Figure shows thefor 8/20 standard current waves series was3developed theμscase where surge the maximum currentthat is the harmonic ofwere the the Fourier used in the testing. meansfor that the time point when the Standard surge analysis current wave usedsurge in thewaveform, numerical analysis (8/20This The induced emotive force is calculated Fig. byFor3.the temporal 1 A. The use of the input current the electromagnetic field The induced emotive force is calculated by theseries temporal change was developed for the case where the maximum current is μs). surge current its maximum 8 μs, and the time when change theofforce magnetic flux intothethe the iron core. The analysis its reaches multiplication by theismaximum value ofpoint the actual The inducedof emotive is calculated by temporal 1 A.induced The use voltage of in thethe input current for theiselectromagnetic field Fig. 2. Schematic diagram the magnetic flux linkage secondary of the magnetic flux in the iron core. The voltage it becomes half of the maximum is 20 μs. change of calculate the in magnetic fluxvoltage. in the iron core. The voltage winding to the induced analysis is its multiplication the maximum value of the actual For the the harmonic analysisby of the surge waveform, the Fourier induced the secondary winding is expressed by temporal surge current. Table 1 lists the magnitudes of the harmonics secondary winding is expressed temporal change of the induced in the secondary winding is expressed byby thethe temporal current. Table 1forlists the For magnitudes of the harmonics series was developed the case wherethe the harmonic maximum current is analysis the surge Fourier change of emotive the magnetic flux inasaby closed loop, assurge follows: when the maximum surge ofcurrent is waveform, 50,000 A.theThe dc change of the magnetic flux in a closed loop,as follows: The induced is calculated the temporal when the use maximum surge current is 50,000 A. The field dc magnetic flux in aforce closed loop, follows: 1 A. The of the input current for the electromagnetic series was developed for the case change of the magnetic flux in the iron core. The voltage component component this is 22,305 A. where the maximum current in this case is 22,305 A. maximumin analysis is its multiplication by the value of case the actual Fig. 2. Schematic diagram of the magnetic flux linkage to the secondary winding to calculate the induced voltage. μs). induced in the secondary winding is A. The use of harmonics the input current for the electromagnetic field the1magnitudes of the d d expressed by the temporal surge current. Table 1 lists is , (9) A dl N dsina N (9) changeEofa the magneticBflux closed loop, as follows: when maximum current for isisa50,000 A.surge Thewith dc Table of surge the harmonics lighting analysis its multiplication by the maximum value of the actual , 1.theCoefficients (9) dt c adt s Table the harmonics for a lighting surge with component this case is 22,305 A. 1. s c the 50,000 Ainmaximum current (Type: 8/20Coefficients μs). Table 1 of where N is the number of turns, B is the linkage flux density, surge current. lists the magnitudes of the harmonics when d d Sine Cosine the 50,000 A maximum current (Type: 8/20 μs). and where s isEtheN area ofthe the Stokes’ theorem, number turns, B ,isB theislinkage flux density, and s is (9)linkage Nisisthe B ds NofUsing A winding. dl where N number of turns, thethe flux density, theOrder maximum surge current is 50,000 A. The dc component in this a Table of the harmonics for a lighting surge with s c Order1. Coefficients Coefficients Coefficients dt EMF equation candt be rewritten as follows: Sine Cosine the area ofthe thearea winding. Using Stokes’Using theorem, the EMF equation the 50,000 A maximum current (Type: 8/20 μs). and s is of the winding. Stokes’ theorem, the case 22,305 A. -6,330 a1 20,870 bis where N is the number of turns, B is the linkage flux density, 1 Sine Cosine rewritten as follows: Order Coefficients Order Coefficients a2 3,280 b2 -6,530 andcan s is be theequation area winding. Using Stokes’ theorem, the EMF be rewritten as follows: N ofdthecan Order Coefficients Order Coefficients a3 340 b3 -3,700 EMF equation ds Az ds , (10) Ea l can be rewritten S Aasz follows: a 20,870 b -6,330 1 1 S aa41 -265 bb41 -1,300 a S a dt a 20,870 -6,330 a2bb52 3,280 b2 -6,530 aa52 -140 -800 3,280 -6,530 N d , (10) aa63 -60 bb63 -605 340 -3,700 a 340 b -3,700 length Az dswinding A ds l 3 3 (10) where lE isathe of the secondary region, S + is the z , (10) -145 bb74 -445 aS dt Sa z a zaa74 Sa -265 -1,300 Sa Sa a area in the positive direction, area of the winding and Sa- is the a -265 b -1,300model A through-type CT was selected as the numerical analysis 4 4 a -120 b -245 8 8 a -140 b -800 5 5 area of the winding area in athe negative direction. The above aa96 80 -180 -140of the CT. First,b5the primary current -800for the -60 -605 5bb96 surge analysis forathe equation can be reorganized using the complex approximation where l is the length of the secondary winding region, S + is the the where l is the length of the secondarya winding region, Sa+ is-145 aa107 0 -155 -445 a6bb107 -60 was inputbas 6 a sinusoidal ac-605 experimental verification voltage. A method area of as thefollows: winding area in the positive direction, and Sa- is the a8 Sa- S b -245 where is the length of in thethe secondary winding region, is-120 the isa+ the area area of lthe winding area positive direction, and a7b89current was also -145applied to analyze b7 the characteristics -445 of the area of the winding area in the negative direction. The above 3. NUMERICAL a9 80 -180 surge ANALYSIS of the area using in the negative direction. area ofwinding thereorganized winding area the positive direction, and Sequation 3 TheAaabove equation can be thein complex approximation a- is the -155 a8b10as thefield -120 b8 -245 numerical analysis and the induced 10through-type CT0 was selected magnetic distribution electromotive force. method follows: can reorganized complex approximation method as areaasbe of the windingusing area the in the negative direction. The above d d E N B ds N A dl dt dt N d E l A ds S dt 3. NUMERICAL ANALYSIS A ds a9 3. NUMERICAL ANALYSIS follows: equation can be reorganized using the complex approximation a10 3 method as follows: N t t j Aa Aa Ea l is induced by magnetic vector is induced by magnetic vector , y) dl , (8) A denotes the , (8) ,and y) ±dldenotes wo-dimensional A denotes the and ± denotes wo-dimensional to the secondary temporal tothe the secondary . The voltage y the temporal the temporal ollows: . The voltage y the temporal (9) llows: e flux density, ’ theorem, (9) the A through-type CT was selected the numerical 3.1asAnalysis model . (11) (11) Sa N t t j Aa Aa . Ea l series 2.5 Fourier S a expansion for the surge inflow 80 0 analysis (11) The2.5 Fourier series forseries a randomexpansion periodic function Fourier foris used the tosurge inflow develop an equation that describes the surge current, as follows: Fourier series expansion for the surge inflow 2.5 Fourier forperiodic a random series The The Fourier series for a random functionperiodic is used to function is used to develop equation describes surgethe as f ( xan) an a0equation that (an cos bthe )current, , surge (12) develop thatnxdescribes current, as follows: n sin nx follows: n 1 where a0 denotes the magnitude of the dc component, and an and f ( xcoefficients ) a0 of (the ansine cosand nx cosine bn sin nx)respectively. , (12) bn are the terms, (12) n 1 μs standard surge current waves that Figure 3 shows the 8/20 where a0 denotes magnitude of the dc component, and awhen were used in thethe testing. This means that the time point n and bthe the coefficients of thethe and cosine respectively. where a0 denotes magnitude dc time component, and an and n are s, the and the surge current reaches itssine maximum is terms, 8 μof Figure 3 shows the 8/20 s standard point it becomes halfμof the 20 μcosine s.waves that bnwhen are the coefficients ofmaximum thesurge sineiscurrent and terms, respectively. were used in the testing. This means that the time point when the surge current reaches its maximum is 8 μs, and the time point when it becomes half of the maximum is 20 μs. b9 b10 -180 -155 3. NUMERICAL ANALYSIS A commonly used model was selected to investigate the A through-type CTsaturation was selected numerical analysis characteristics of the and as thethe induced electromotive force of the iron core when a surge is applied to the CT. A twodimensional time varying field finite element analysis was conducted using the time difference method. When considering the magnetic saturation characteristics of the soft iron of the core, the hysteresis curve shown in Fig. 4 was used. To apply the input current to the primary coil, the surge current waveform that was developed into the Fourier series was used. Figure 5 shows the distribution of the shape and the equipotential line distribution of the analyzed CT. The specific dimensions and simulation parameters are listed in Table 2. Fig. 3. Standard surge current wave used in the numerical analysis (8/20 μs). the harmonic analysis of the the Fourier Fig.For 3. Standard surge current wave usedsurge in the waveform, numerical analysis (8/20 series was developed for the case where the maximum current is μs). 1 A. The3.use of the input current for the electromagnetic Fig. Standard surge current wave used infield the numerical analysis For theisharmonic analysis by of the maximum surge waveform, analysis its multiplication value ofthe theFourier actual (8/20 μs). surge was current. Table for 1 lists the where magnitudes of the harmonics series developed the case the maximum current is 1when A. The of the input current for the theusemaximum surge current is electromagnetic 50,000 A. Thefield dc analysis is its by the component inmultiplication this case is 22,305 A.maximum value of the actual surge current. Table 1 lists the magnitudes of the harmonics when theCoefficients maximum ofsurge current is A.surge The with dc Table 1. the harmonics for 50,000 a lighting component in maximum this case iscurrent 22,305(Type: A. the 50,000 A 8/20 μs). Sine Cosine Fig. 4. Hysteresis curve used in the time difference finite element analysis. Trans. Electr. Electron. Mater. 18(2) 97 (2017): Y. S. Kim 100 (a) 3.3 Surge analysis (b) Fig. 5. (a) Analysis model and (b) distribution of the magnetic flux in the current transformer. The time difference finite element analysis was conducted using the coefficients of the surge current waveform that was developed using the Fourier series. Figure 7 shows the lines of the magnetic force at specific times based on the surge current in the results of the magnetic field analysis. Figure 8 shows the magnetic flux density distribution in the CT core when the surge current of 8/20 μs and the maximum value of 50,000 A were applied to the primary winding of the CT. Because the induced coil part (EMF part) generates a magnetic field in the opposite direction via the induced current, the magnetic field is smaller than the core part. The magnetic flux density appeared the largest near 8 μs, which is the maximum input value of the inrush current. Figure 9 shows the instantaneous induced EMF of the secondary winding when the maximum values of the surge input current are 1,000 A and 5,000 A. Figure 10 shows the waveforms of the input current and the induced EMF when the maximum value of the input current is 5,000 A. In this case, the induced EMF is large in the early stages when the surge was increasing rapidly, and a negative induced EMF appears in the part where the surge decreases. Table 2. Specifications of the analyzed current transformer. Spec. Outer diameter of core [mm] Inner diameter of core [mm] Diameter of primary conductor [mm] Diameter of EMF coil [mm] Relative permeability (linear region) Conductivity of EMF coil [S/m] Primary current (time harmonic) [A] Frequency of primary current [Hz] Surge current (max.) [A] Dimension & Values 63 44 6 1.5 1,000 5 × 107 500 60 5 × 104 (a) (c) (b) a) 2 μs a) 2 μs (d) b) 8 μs b) 8 μs 3.2 Time difference finite element analysis for the AC field The numerical analysis for the ac magnetic field was analyzed using the time difference finite element method. Then, the induced EMF characteristics were investigated when the maximum input sine-wave current is 500 A. Figure 6 shows the primary current and EMF wave of the secondary winding. Because the ac field was analyzing using the time difference finite element analysis, the size of the induced electromotive force is approximately 0.07 V, and the phase of the induced electromotive force is behind the input current by approximately 90°. c) 20 μs d) 34 μs Fig. 9. Insta Fig. 9. for Insta inflow al inflow for a la c) 20ofμsthe magnetic flux density d) 34 μsin the core with Fig. 7. Distribution respect to the time during the surge inflow: not Fig. 7. Distribution of the magnetic flux density in (a) the the core core with is respect Distribution of the magnetic flux density core with respect saturated in the stage in 2 μs, saturated state with 1.58 T toFig. the7.time duringinitial the surge inflow: a)(b) the coreinisthe not saturated in the to thethe time during the is surge a) theincore notthe saturated in the when surge inflow at itsinflow: maximum 8 μs,isthe (c) surge inflow initial stage, b) saturated state with 1.58 [T] when surge inflow is at initial stage, b) saturated state with 1.58 [T] when the surge inflow is at is of its maximum value andisthe is not saturated inand 20 μs, itshalf maximum, c) the surge inflow halfcore of its maximum value the its maximum, c) the surge inflow is half of its maximum value and the core (d) is not d) the endinflow stage of surge inflow (max.: and the saturated, end stageand of the surge in the 34 μs (max.: 50,000 A, core is not saturated, and d) the end stage of the surge inflow (max.: 50,0008/20 μs). A, wave: 8/20 μs). wave: 50,000 A, wave: 8/20 μs). Fig. 10. 10. InI Fig. electromotiv electromotive Fig. parts (core (core part part and and Fig. 8.8. Magnetic Magnetic flux flux density density in in the the specific specific two two parts EMF EMFpart) part)with withrespect respect to to time. time. Fig. 6. Primary current (max.: 500 A, freq.: 60 Hz) and electromotive force of the secondary windings. Fig.Figure 8. Magnetic flux density in the specific two parts (core EMFpart of and the Figure 99 shows shows the the instantaneous instantaneous induced EMF of the EMF part) with respect to time. secondary winding when the maximum values of the surge input secondary winding when the maximum values of the surge input current shows the the current are are 1,000 1,000 A A and and 5,000 5,000 A. Figure 10 shows waveforms when the the waveforms of of the the input input current current and the induced EMF when maximum this case, case, the the maximumvalue value of of the the input input current current is 5,000 A. In this induced surge was was induced EMF EMF isis large large in in the the early stages when the surge increasing appears in in the the increasing rapidly, rapidly, and and aa negative negative induced EMF appears 4. EXPERIM EXPERI 4. To verify To verify and the the algo alg and based on on t based electromoti electromotiv compared bb compared current teste test current measureme measuremen the conduct conduc the performed performed winding of of winding Specs Winding ratio Trans. Electr. Electron. Mater. 18(2) 97 (2017): Y. S. Kim (a) Model 1 Model 2 Model 3 75:5 80:5 100:5 Class 3.0 3.0 3.0 Frequency [Hz] 50/60 50/60 50/60 5101 1,150 2nd current [A] 5 5 Max. voltage [V] 1,150 1,150 Table Specifications of the load 17 current tester.17.5 Inner3.dia. of core [mm] Outer dia. of Specs core [mm] Power Width ofInput corevoltage [mm] Output current Radius of core [mm] Timer No. of turns (a) 24.5 23 0.5 14 (b) Values 27.5 1.2 kVA 1φ AC22 220 V, 60 Hz 1φ AC 0.50 ∼ 400 A Set. 99 h 59 min. 17.5 27.5 22 0.5 15 20 (c) (b) a) b) c) Fig.CTs 12.used CTs in used the experiment: a) 75:5, 80:5, and 100:5. Fig. 12. theinexperiment: (a) 75:5, (b) b) 80:5, and (c)c)100:5. First, for the experiment to measure the electromotive force induced electromotive force of the secondary winding was measured Specs Values with a digital multi-meter while current primary Modelthe 1 input Model 2 to the Model 3 winding was varied range of 0 A 100:5 to 400 A Winding ratio over the ac-maximum 75:5 80:5 for the three models. Class 3.0 3.0 3.0 The saturation induced electromotive Frequency [Hz] characteristics 50/60 of the 50/60 50/60 5 The force 2nd forcurrent the [A] three models5 are shown5 in Fig. 13. Max. voltageof [V]the induced 1,150 1,150force can1,150 characteristics electromotive be seen Inner dia. core [mm]current because 17 17.5 17.5 through theof induced the voltage is proportional Outer dia. of core [mm] 24.5 27.5 27.5 to the current. Width of core [mm] 23 22 The experiment results show that the22secondary induced and 4.saturation characteristics theexperiment. CT, the Table Specifications of the CTs usedof in the Fig. 9. Instantaneous induced electromotive force during the surge inflow for a large current of: (a) 1,000 A and (b) 5,000 A (type 8/20 μs). Radius of core [mm] No. of turns 0.5 14 0.5 15 0.5 20 Fig. 10. Input surge current (max.: 50,000 A, type: 8/20 μs) with electromotive force during the surge inflow. 4. EXPERIMENT To verify the saturation characteristics of the magnetic core and the algorithm of the time difference finite element method based on the CT capacity, the waveforms of the induced electromotive force of the secondary winding in each case were compared by way of an experiment. Figure 11 shows a load current tester, which is the input device that was used for the measurement of the induced electromotive force of the CT and the conducting saturation experiment. This experiment was performed while varying the Fig. 11. Experimental setup for measuring the electromotive force of the CTs. Fig. 13. Saturation characteristics of the iron core using the secondary current. input current of the primary winding of the CT from 0 A to 400 A. Table 3 lists the specifications of the load current tester. For the experiment, three typical through-type CTs were selected, as shown in Fig. 12. The specifications and shape dimensions of the experimental models are listed in Table 4. First, for the experiment to measure the electromotive force and saturation characteristics of the CT, the induced electromotive force of the secondary winding was measured with a digital multi-meter while the input current to the primary winding was varied over the ac-maximum range of 0 A to 400 A for the three models. The saturation characteristics of the induced electromotive force for the three models are shown in Fig. 13. The characteristics of the induced electromotive force can be seen through the induced current because the voltage is proportional to the current. The experiment results show that the secondary induced current was saturated when the primary current is around 140 A for model 1, 180 A for model 2, and 230 A for model 3. These saturation characteristics indicate that the induced Fig. In the sec finite eleme with the ma Because of 180 A in the applicat analysis res and the m induced elec The anal difference f of the induc and from t shapes of th Trans. Electr. Electron. Mater. 18(2) 97 (2017): Y. S. Kim 102 (a) (b) Fig. 14. (a) Simulated and (b) measured electromotive force of the secondary winding (Model 2, max. 100 A) current did not increase any further because the magnetic core became saturated, as the magnetic flux density increased and the permeability decreased. The current ratios of model 1, model 2, and model 3 are 75:5, 80:5, and 100:5, respectively. The current ratio of model 3 is large compared with those of models 1 and 2. Therefore, the saturation point of the secondary induced current of model 3 is late compared to those of the other experimental models. The results of this experiment show that the saturation point of the magnetic core varies according to the ratio between the primary and secondary windings. In the second experiment, the algorithm of the time difference finite element method was verified by inputting the ac current with the maximum of 100 A to model 2. Because the saturation occurred at the primary input current of 180 A in the case of model 2, the measurement result after the application of the 100 A was compared with the numerical analysis result. Figure 14 shows the numerical analysis results and the measurement results for the characteristics of the induced electromotive force of the CT. The analysis results validated the algorithm of the time difference finite element method, because the maximum values of the induced electromotive force from the use of this method and from the experiment are approximately 0.02 V, and the shapes of their waveforms (schematic shapes) are similar. 5. CONCLUSIONS A CT is a general measurement instrument for the measurement of the ac current in various industrial fields. The analysis of the characteristics of the induced electromotive force and the magnetic field in the induction coil when a large current, such as a surge current, flows into a CT is indispensable. In this study, the characteristics of the magnetic field and the induced electromotive force in the magnetic core were analyzed in consideration of the saturation characteristics, and the analysis results were compared with the experiment results. For the twodimensional analysis of the CT, constraints were applied to the induced current coil. Furthermore, the time difference finite element method was used to analyze the transient states, such as the inrush current. To express the surge current as a function, the sizes of the harmonics were extracted through the development of the surge current using the Fourier series, followed by its application to the surge analysis. The shape of the induced electromotive force that was measured through the experiment was compared with that of the simulation results. When a large current, such as an inrush current, flows into a CT, the magnetic core becomes saturated and the sensing capacity of the CT decreases. Therefore, for the optimum design of CTs, the size of the CT and the characteristics of the magnetic core must be considered. ACKNOWLEDGMENT This paper was supported by Joongbu University Research & Development Fund, in 2016. REFERENCES [1] B. F. Istfan, Ph.D. thesis(Rensselaer Polytechnic Institute, New York, USA, 1987). [2] S. Williamson and J. W. Ralph, IEE Proceedings A-Physical Science, Measurement and Instrumentation, Management and Education-Reviews, 6, 391 (1982). [3] Y. H. Eum, C. S. Koh, S. K. Hong, and P. S. Shin, Trans. KIEE., 56, 869 (2007). [4] Y. C. Kang, J. Y. Park, T. Zheng, S. I. Jang, and Y. G. Kim, Trans. KIEE., 57, 149 (2008). [5] A. A. Adly, IEEE Trans. Magn., 37, 2855 (2001). [DOI: https://doi. org/10.1109/20.951327] [6] L. A. Kojovic, 2002 IEEE Power Engineering Society Summer Meeting, 1078 (2002). [7] H. Yu, J. S. Yuan, and J. Zou, IEEE Trans. Magn., 42, 1431 (2006). [DOI: https://doi.org/10.1109/TMAG.2006.872478] [8] S. Bittanti, F. A. Cuzzola, F. Lorito, and G. Poncia, IEEE Trans. Control Syst. Technol., 9, 565 (2001). [DOI: https://doi. org/10.1109/87.930967]