Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Matrix Lie groups
and their Lie algebras
Mahmood Alaghmandan
A project in fulfillment of the requirement for the Lie algebra course
Department of Mathematics and Statistics
University of Saskatchewan
March 2012
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
1 / 36
Special orthogonal group
An example of Lie groups
A matrix A is orthogonal if its transpose is equal to its inverse:
Atr = A−1 .
Equivalently
AAtr = I
If for orthogonal matrix A, det(A) = 1, A is call special orthogonal
matrix.
Orthogonal and special orthogonal groups
O(n) = {A ∈ Mn (R) : Atr = A−1 }
and
SO(n) = {A ∈ Mn (R) : Atr = A−1 , det(A) = 1}.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
2 / 36
Special orthogonal group
An example of Lie groups
A matrix A is orthogonal if its transpose is equal to its inverse:
Atr = A−1 .
Equivalently
AAtr = I
If for orthogonal matrix A, det(A) = 1, A is call special orthogonal
matrix.
Orthogonal and special orthogonal groups
O(n) = {A ∈ Mn (R) : Atr = A−1 }
and
SO(n) = {A ∈ Mn (R) : Atr = A−1 , det(A) = 1}.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
2 / 36
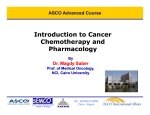
Example.
SO(2) is the set of all matrices
cos θ − sin θ
sin θ cos θ
for different angels θ.
The rotation with angle θ.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
3 / 36
Example.
SO(3) forms the set all of rotations in R3 which preserves the length
and orientation.
Every rotation in SO(3) fixes a unique 1-dimensional linear subspace
of R3 , due to Euler’s rotation theorem.
cos θ − sin θ 0
sin θ cos θ 0
(0.1)
0
0
1
is the rotation with angel θ with the axis of rotation z-axis.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
4 / 36
Example.
SO(3) forms the set all of rotations in R3 which preserves the length
and orientation.
Every rotation in SO(3) fixes a unique 1-dimensional linear subspace
of R3 , due to Euler’s rotation theorem.
cos θ − sin θ 0
sin θ cos θ 0
(0.1)
0
0
1
is the rotation with angel θ with the axis of rotation z-axis.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
4 / 36
Example.
SO(3) forms the set all of rotations in R3 which preserves the length
and orientation.
Every rotation in SO(3) fixes a unique 1-dimensional linear subspace
of R3 , due to Euler’s rotation theorem.
cos θ − sin θ 0
sin θ cos θ 0
(0.1)
0
0
1
is the rotation with angel θ with the axis of rotation z-axis.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
4 / 36
Applying complex matrices!
σ1 =
0 1
1 0
, σ2 =
0 −i
i 0
, σ3 =
1 0
0 −1
called Pauli matrices are linearly independent. So for each
x = (xi )3i=1 ∈ R3 ,
x1
x = x2 = x1 σ1 + x2 σ2 + x3 σ3 .
x3
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
5 / 36
A new interpretation
Note that
iθ/2
iθ/2
−1
e
0
e
0
(x1 σ1 + x2 σ2 + x3 σ3 )
=
0
e−iθ/2
0
e−iθ/2
(x1 cos θ + x2 sin θ)σ1 + (−x1 sin θ + x2 cos θ)σ2 + x3 σ3 .
As clearly we can see this is the rotation that appeared in a matrix in
SO(3), (0.1).
Special unitary group SU(2)
Let SU(2) be the set of all matrices
a + di −b − ci
A=
where det(A) = 1 and a, b, c, d ∈ R.
b − ci a − di
We can see that these matrices form a group, we call them special
unitary matrices. Although this is a complex counterpart of SO(2), it
has a strong relation with SO(3).
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
6 / 36
A new interpretation
Note that
iθ/2
iθ/2
−1
e
0
e
0
(x1 σ1 + x2 σ2 + x3 σ3 )
=
0
e−iθ/2
0
e−iθ/2
(x1 cos θ + x2 sin θ)σ1 + (−x1 sin θ + x2 cos θ)σ2 + x3 σ3 .
As clearly we can see this is the rotation that appeared in a matrix in
SO(3), (0.1).
Special unitary group SU(2)
Let SU(2) be the set of all matrices
a + di −b − ci
A=
where det(A) = 1 and a, b, c, d ∈ R.
b − ci a − di
We can see that these matrices form a group, we call them special
unitary matrices. Although this is a complex counterpart of SO(2), it
has a strong relation with SO(3).
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
6 / 36
Special unitary group
A complex n × n matrix A is called unitary if
its columns are orthogonal. (Linear algebra)
over Hilbert spaces H = Cn it forms a unitary operator i.e.
A∗ = A−1 when A∗ is the adjoint operator of A. (Functional
Analysis)
Special Unitary group
SU(n) = {A ∈ Mn (C) : A∗ A = AA∗ = I and det(A) = 1.}
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
7 / 36
Special unitary group
A complex n × n matrix A is called unitary if
its columns are orthogonal. (Linear algebra)
over Hilbert spaces H = Cn it forms a unitary operator i.e.
A∗ = A−1 when A∗ is the adjoint operator of A. (Functional
Analysis)
Special Unitary group
SU(n) = {A ∈ Mn (C) : A∗ A = AA∗ = I and det(A) = 1.}
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
7 / 36
Outline
1
2
Matrix Lie groups
Matrix exponential
3
Lie algebra of a matrix Lie group
4
Lie algebra of some famous matrix Lie groups
5
Geometric interpretation
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
8 / 36
General linear group
GL(n, F)
General linear group
Set of all invertible matrices on field F also form a group with the
regular multiplication of matrices denoted by GL(n, F).
Special linear group
All invertible matrices A ∈ GL(n, F) s.t. det(A) = 1 denoted by
SL(n, F).
All groups GL(n, R), SL(n, R), SL(n, C), SU(n), and SO(n) are all
subgroups of GL(n, C) for an appropriate n.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
9 / 36
General linear group
GL(n, F)
General linear group
Set of all invertible matrices on field F also form a group with the
regular multiplication of matrices denoted by GL(n, F).
Special linear group
All invertible matrices A ∈ GL(n, F) s.t. det(A) = 1 denoted by
SL(n, F).
All groups GL(n, R), SL(n, R), SL(n, C), SU(n), and SO(n) are all
subgroups of GL(n, C) for an appropriate n.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
9 / 36
General linear group
GL(n, F)
General linear group
Set of all invertible matrices on field F also form a group with the
regular multiplication of matrices denoted by GL(n, F).
Special linear group
All invertible matrices A ∈ GL(n, F) s.t. det(A) = 1 denoted by
SL(n, F).
All groups GL(n, R), SL(n, R), SL(n, C), SU(n), and SO(n) are all
subgroups of GL(n, C) for an appropriate n.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
9 / 36
Topology on Mn (C)
Hilbert-Schmidt norm for matrix A = [ai,j ]i,j∈1,··· ,n is
kAk2 :=
n
X
1/2
|ai,j |2
.
i,j=1
Convergence
Let (Am )m be a sequence in Mn (C). Am converges to A if
kAm − Ak2 → 0.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
10 / 36
Topology on Mn (C)
Hilbert-Schmidt norm for matrix A = [ai,j ]i,j∈1,··· ,n is
kAk2 :=
n
X
1/2
|ai,j |2
.
i,j=1
Convergence
Let (Am )m be a sequence in Mn (C). Am converges to A if
kAm − Ak2 → 0.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
10 / 36
Matrix Lie group
Matrix (linear) Lie group
A matrix Lie group G is a subgroup of GL(n, C) such that if (Am )m is
any convergent sequence in G, either A ∈ G or A is not invertible.
O(n), SO(n), SU(n), SL(n, R), SL(n, C), GL(n, R), and GL(n, C) are all
matrix Lie groups.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
11 / 36
Matrix Lie group
Matrix (linear) Lie group
A matrix Lie group G is a subgroup of GL(n, C) such that if (Am )m is
any convergent sequence in G, either A ∈ G or A is not invertible.
O(n), SO(n), SU(n), SL(n, R), SL(n, C), GL(n, R), and GL(n, C) are all
matrix Lie groups.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
11 / 36
Outline
1
2
Matrix Lie groups
Matrix exponential
3
Lie algebra of a matrix Lie group
4
Lie algebra of some famous matrix Lie groups
5
Geometric interpretation
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
12 / 36
Matrix exponential
For A ∈ Mn (C), we define
∞
X
1 k
A
e :=
k!
A
k =0
where A0 = I.
It is well defined:
∞
X
1
ke k2 ≤
kAkk2 = ekAk2 < ∞;
k!
A
k =0
Main properties of eA
e0 = I,
eA
∗
∗
= e(A ) ,
Mahmood Alaghmandan (U of S)
eA
tr
tr
= e(A ) , and e(α+β)A = eαA eβA .
Matrix Lie groups and their Lie algebras
March 2012
13 / 36
Matrix exponential
For A ∈ Mn (C), we define
∞
X
1 k
A
e :=
k!
A
k =0
where A0 = I.
It is well defined:
∞
X
1
ke k2 ≤
kAkk2 = ekAk2 < ∞;
k!
A
k =0
Main properties of eA
e0 = I,
eA
∗
∗
= e(A ) ,
Mahmood Alaghmandan (U of S)
eA
tr
tr
= e(A ) , and e(α+β)A = eαA eβA .
Matrix Lie groups and their Lie algebras
March 2012
13 / 36
Matrix exponential
For A ∈ Mn (C), we define
∞
X
1 k
A
e :=
k!
A
k =0
where A0 = I.
It is well defined:
∞
X
1
ke k2 ≤
kAkk2 = ekAk2 < ∞;
k!
A
k =0
Main properties of eA
e0 = I,
eA
∗
∗
= e(A ) ,
Mahmood Alaghmandan (U of S)
eA
tr
tr
= e(A ) , and e(α+β)A = eαA eβA .
Matrix Lie groups and their Lie algebras
March 2012
13 / 36
More properties
Matrix exponential essential properties
If AB = BA, then eA+B = eA eB = eB eA .
eA is invertible and (eA )−1 = e−A .
−1
If A is invertible, then eABA
= AeB A−1 .
Even if [A, B] 6= 0, we have
eA+B = lim
k →∞
1
1
e k Ae k B
k
(2.1)
called Lie product formula.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
14 / 36
More properties
Matrix exponential essential properties
If AB = BA, then eA+B = eA eB = eB eA .
eA is invertible and (eA )−1 = e−A .
−1
If A is invertible, then eABA
= AeB A−1 .
Even if [A, B] 6= 0, we have
eA+B = lim
k →∞
1
1
e k Ae k B
k
(2.1)
called Lie product formula.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
14 / 36
Calculation of the exponential of a matrix
Calculation of the exponential of nilpotent matrices is easy. For
diagonalizable matrices also we have a good trick to simplify the
calculations. For an arbitrary matrix we can write as summation of one
nilpotent matrix and one diagonalizable matrix which commute.
The relation of determinant and trace through matrix exponential
Let A ∈ Mn (C). Then det(eA ) = etrace(A) .
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
15 / 36
Calculation of the exponential of a matrix
Calculation of the exponential of nilpotent matrices is easy. For
diagonalizable matrices also we have a good trick to simplify the
calculations. For an arbitrary matrix we can write as summation of one
nilpotent matrix and one diagonalizable matrix which commute.
The relation of determinant and trace through matrix exponential
Let A ∈ Mn (C). Then det(eA ) = etrace(A) .
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
15 / 36
Derivative of matrix exponential function
Moreover A 7→ eA is a continuous map:
If Am → A, then eAm → eA .
So we can talk about the limit of the following matrices where ∆t → 0
e(t0 +∆t)A − et0 A
∆t
Therefore,
d tA
e(t0 +∆t)A − et0 A
(e )|t=t0 = lim
= Aet0 A
dt
∆t
∆t→0
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
16 / 36
Derivative of matrix exponential function
Moreover A 7→ eA is a continuous map:
If Am → A, then eAm → eA .
So we can talk about the limit of the following matrices where ∆t → 0
e(t0 +∆t)A − et0 A
∆t
Therefore,
d tA
e(t0 +∆t)A − et0 A
(e )|t=t0 = lim
= Aet0 A
dt
∆t
∆t→0
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
16 / 36
Outline
1
2
Matrix Lie groups
Matrix exponential
3
Lie algebra of a matrix Lie group
4
Lie algebra of some famous matrix Lie groups
5
Geometric interpretation
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
17 / 36
Lie algebra of a matrix Lie group
Definition of Lie algebra of G
For G be a matrix Lie group.
g := {A ∈ Mn (C) : etA ∈ G for all t ∈ R}.
Note that:
t should be real.
For A ∈ g, etA ∈ G for all real t.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
18 / 36
Lie algebra of a matrix Lie group
Definition of Lie algebra of G
For G be a matrix Lie group.
g := {A ∈ Mn (C) : etA ∈ G for all t ∈ R}.
Note that:
t should be real.
For A ∈ g, etA ∈ G for all real t.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
18 / 36
Question. Is the Lie algebra of a matrix Lie group really a Lie algebra?
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
19 / 36
YES!
It is really a (REAL) Lie algebra Lie bracket over matrices!
For A ∈ g, tA ∈ g for all t ∈ R.
A + B ∈ g if A, B ∈ g.
Proof. If [A, B] = 0, then eA+B = eA eB .
In general we apply Lie product formula, (2.1).
1 1 k
(1) For each k , e k A e k B ∈ G.
(2) Its limit (eA+B ) must belong to G.
[A, B] ∈ g if A, B ∈ g.
Proof.
G 3 etA eB e−tA = ee
Mahmood Alaghmandan (U of S)
tA Be−tA
=⇒ etA Be−tA ∈ g
Matrix Lie groups and their Lie algebras
March 2012
20 / 36
YES!
It is really a (REAL) Lie algebra Lie bracket over matrices!
For A ∈ g, tA ∈ g for all t ∈ R.
A + B ∈ g if A, B ∈ g.
Proof. If [A, B] = 0, then eA+B = eA eB .
In general we apply Lie product formula, (2.1).
1 1 k
(1) For each k , e k A e k B ∈ G.
(2) Its limit (eA+B ) must belong to G.
[A, B] ∈ g if A, B ∈ g.
Proof.
G 3 etA eB e−tA = ee
Mahmood Alaghmandan (U of S)
tA Be−tA
=⇒ etA Be−tA ∈ g
Matrix Lie groups and their Lie algebras
March 2012
20 / 36
YES!
It is really a (REAL) Lie algebra Lie bracket over matrices!
For A ∈ g, tA ∈ g for all t ∈ R.
A + B ∈ g if A, B ∈ g.
Proof. If [A, B] = 0, then eA+B = eA eB .
In general we apply Lie product formula, (2.1).
1 1 k
(1) For each k , e k A e k B ∈ G.
(2) Its limit (eA+B ) must belong to G.
[A, B] ∈ g if A, B ∈ g.
Proof.
G 3 etA eB e−tA = ee
Mahmood Alaghmandan (U of S)
tA Be−tA
=⇒ etA Be−tA ∈ g
Matrix Lie groups and their Lie algebras
March 2012
20 / 36
[A, B] ∈ g if A, B ∈ g.
Rest of the proof.
But
d tA −tA
d
d
(e Be )|t=0 = (etA )|t=0 Be−0A + e0A (Be−tA )|t=0 = AB − BA.
dt
dt
dt
Why does it show that AB − BA ∈ g?
Because:
d tA −tA
e∆tA Be−∆tA − B
(e Be )|t=0 = lim
dt
∆t
∆t→0
AND g is a complete vector space!
( g 3 Ak → A then limk →∞ eAk = eA . So eA ∈ G. Hence g is complete!)
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
21 / 36
[A, B] ∈ g if A, B ∈ g.
Rest of the proof.
But
d tA −tA
d
d
(e Be )|t=0 = (etA )|t=0 Be−0A + e0A (Be−tA )|t=0 = AB − BA.
dt
dt
dt
Why does it show that AB − BA ∈ g?
Because:
d tA −tA
e∆tA Be−∆tA − B
(e Be )|t=0 = lim
dt
∆t
∆t→0
AND g is a complete vector space!
( g 3 Ak → A then limk →∞ eAk = eA . So eA ∈ G. Hence g is complete!)
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
21 / 36
[A, B] ∈ g if A, B ∈ g.
Rest of the proof.
But
d tA −tA
d
d
(e Be )|t=0 = (etA )|t=0 Be−0A + e0A (Be−tA )|t=0 = AB − BA.
dt
dt
dt
Why does it show that AB − BA ∈ g?
Because:
d tA −tA
e∆tA Be−∆tA − B
(e Be )|t=0 = lim
dt
∆t
∆t→0
AND g is a complete vector space!
( g 3 Ak → A then limk →∞ eAk = eA . So eA ∈ G. Hence g is complete!)
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
21 / 36
Lie algebra of a matrix Lie group
Anticommutativity and Jacobi identity are achievable because of
the definition of the Lie bracket over matrices.
Summary
Let G be a matrix Lie group. Then g is a vector space over R.
As a subspace of Mn (C), g is a complete topological space.
Moreover, g is a Lie algebra with Lie bracket over matrices over field R.
In the following we will see that for a variety of matrix Lie groups, Lie
algebra will actually form a complex Lie algebra. We call these groups,
complex matrix Lie groups.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
22 / 36
Lie algebra of a matrix Lie group
Anticommutativity and Jacobi identity are achievable because of
the definition of the Lie bracket over matrices.
Summary
Let G be a matrix Lie group. Then g is a vector space over R.
As a subspace of Mn (C), g is a complete topological space.
Moreover, g is a Lie algebra with Lie bracket over matrices over field R.
In the following we will see that for a variety of matrix Lie groups, Lie
algebra will actually form a complex Lie algebra. We call these groups,
complex matrix Lie groups.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
22 / 36
Why should we care about the Lie algebra of a matrix
Lie group?
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
23 / 36
They are somehow related to their matrix Lie groups!
Proposition
Let G and H be two matrix Lie groups with Lie algebras g and h
respectively. Suppose that Φ : G → H is a group homomorphism. The
there exists an (Lie) algebra homomorphism φ : g → h such that
Φ(eA ) = eφ(A) for every A ∈ g.
The converse of This proposition is not correct in general. There are
some conditions if we impose we will see the converse. For example, if
both groups are simply connected, every homomorphism between Lie
algebras ends to a homomorphism between matrix Lie groups
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
24 / 36
They are somehow related to their matrix Lie groups!
Proposition
Let G and H be two matrix Lie groups with Lie algebras g and h
respectively. Suppose that Φ : G → H is a group homomorphism. The
there exists an (Lie) algebra homomorphism φ : g → h such that
Φ(eA ) = eφ(A) for every A ∈ g.
The converse of This proposition is not correct in general. There are
some conditions if we impose we will see the converse. For example, if
both groups are simply connected, every homomorphism between Lie
algebras ends to a homomorphism between matrix Lie groups
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
24 / 36
Outline
1
2
Matrix Lie groups
Matrix exponential
3
Lie algebra of a matrix Lie group
4
Lie algebra of some famous matrix Lie groups
5
Geometric interpretation
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
25 / 36
The Lie algebra of general linear group GL(n, F)
A is an arbitrary matrix in Mn (C), etA is invertible for all t ∈ R. So
etA ∈ GL(n, C). Hence, gl(n, C) = Mn (C).
If A is a real matrix, etA is real for all t ∈ R. On the other hand, if etA is
a real matrix for every t ∈ R, we have that
A=
e∆tA − I
d tA
(e )|t=0 = lim
dt
∆t
∆t→0
∆tA
should be also real, because e ∆t−I ∈ Mn (R) and Mn (R) is a closed
topological space. Therefore, gl(n, R) = Mn (R).
This argument will work for all real valued matrix Lie groups. It shows
that:
matrix Lie group is REAL =⇒ its Lie algebra is REAL.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
26 / 36
The Lie algebra of general linear group GL(n, F)
A is an arbitrary matrix in Mn (C), etA is invertible for all t ∈ R. So
etA ∈ GL(n, C). Hence, gl(n, C) = Mn (C).
If A is a real matrix, etA is real for all t ∈ R. On the other hand, if etA is
a real matrix for every t ∈ R, we have that
A=
d tA
e∆tA − I
(e )|t=0 = lim
dt
∆t
∆t→0
∆tA
should be also real, because e ∆t−I ∈ Mn (R) and Mn (R) is a closed
topological space. Therefore, gl(n, R) = Mn (R).
This argument will work for all real valued matrix Lie groups. It shows
that:
matrix Lie group is REAL =⇒ its Lie algebra is REAL.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
26 / 36
The Lie algebra of general linear group GL(n, F)
A is an arbitrary matrix in Mn (C), etA is invertible for all t ∈ R. So
etA ∈ GL(n, C). Hence, gl(n, C) = Mn (C).
If A is a real matrix, etA is real for all t ∈ R. On the other hand, if etA is
a real matrix for every t ∈ R, we have that
A=
d tA
e∆tA − I
(e )|t=0 = lim
dt
∆t
∆t→0
∆tA
should be also real, because e ∆t−I ∈ Mn (R) and Mn (R) is a closed
topological space. Therefore, gl(n, R) = Mn (R).
This argument will work for all real valued matrix Lie groups. It shows
that:
matrix Lie group is REAL =⇒ its Lie algebra is REAL.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
26 / 36
The Lie algebra of special linear group SL(n, F)
det(etA ) = et trace(A) . So trace(A) = 0, if etA ∈ SL(n, C).
On the other hand, if trace(A) = 0, det(etA ) = et trace(A) = 1 and so
etA ∈ SL(n, C).
sl(n, C) = {A ∈ Mn (C) : trace(A) = 0}.
Similarly for SL(n, R),
sl(n, R) = {A ∈ Mn (R) : trace(A) = 0}.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
27 / 36
The Lie algebra of special linear group SL(n, F)
det(etA ) = et trace(A) . So trace(A) = 0, if etA ∈ SL(n, C).
On the other hand, if trace(A) = 0, det(etA ) = et trace(A) = 1 and so
etA ∈ SL(n, C).
sl(n, C) = {A ∈ Mn (C) : trace(A) = 0}.
Similarly for SL(n, R),
sl(n, R) = {A ∈ Mn (R) : trace(A) = 0}.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
27 / 36
Special Unitary groups.
etA ∈ SU(n) if for each t ∈ R,
(etA )∗ = (etA )−1 = e−tA .
∗
∗
Also (etA )∗ = etA . Since etA = e−tA , we have
A∗ =
d tA∗
d
(e )|t=0 = (e−tA )|t=0 = −A.
dt
dt
On the other hand, if A∗ = −A
∗
(etA )∗ = (etA ) = e−tA = (etA )−1
which implies that A belong to the Lie algebra of SU(n). So
su(n) = {A ∈ Mn (C) : A∗ = −A and trace(A) = 0}.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
28 / 36
Orthogonal and Special orthogonal group
We can definitely predict that o(n) and so(n), the Lie algebras of O(n)
and SO(n) respectively, are real matrices.
If Atr = −A,
tr
(etA )tr = etA = e−tA = (etA )−1
for all t ∈ R. So A ∈ o(n).
Conversely, if A ∈ o(n), for each t we have
tr
e−tA = (etA )−1 = (etA )tr = etA . If we get derivative from this equation
for t = 0 we have
−A =
d
d −tA
tr
(e )|t=0 = (etA )|t=0 = Atr .
dt
dt
Also note that Atr = −A forces the entries of the main diagonal to be
zero, so automatically trace(A) = 0. Therefore,
o(n) = so(n) = {A ∈ Mn (R) : Atr = −A}.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
29 / 36
Orthogonal and Special orthogonal group
We can definitely predict that o(n) and so(n), the Lie algebras of O(n)
and SO(n) respectively, are real matrices.
If Atr = −A,
tr
(etA )tr = etA = e−tA = (etA )−1
for all t ∈ R. So A ∈ o(n).
Conversely, if A ∈ o(n), for each t we have
tr
e−tA = (etA )−1 = (etA )tr = etA . If we get derivative from this equation
for t = 0 we have
−A =
d −tA
d
tr
(e )|t=0 = (etA )|t=0 = Atr .
dt
dt
Also note that Atr = −A forces the entries of the main diagonal to be
zero, so automatically trace(A) = 0. Therefore,
o(n) = so(n) = {A ∈ Mn (R) : Atr = −A}.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
29 / 36
Outline
1
2
Matrix Lie groups
Matrix exponential
3
Lie algebra of a matrix Lie group
4
Lie algebra of some famous matrix Lie groups
5
Geometric interpretation
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
30 / 36
Lie groups
Manifold
A manifold is a second countable Hausdorff topological space M that is
locally homemorphic to an open subset of Rn .
What does it mean?
It means that for each point x ∈ M there exists a neighborhood U of x
and a homeomorphism φ from U onto some open set in Rn .
Definition of Lie group
A Lie group G is a group as well as a manifold so that the group
operation i.e. (x, y ) 7→ xy and the mapping inverse of the group i.e.
x 7→ x −1 both are smooth functions.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
31 / 36
Matrix Lie groups are Lie groups
GL(n, C) is a Lie group
We know that det : Mn (C) → C is a continuous map; therefore,
GL(n, C) = det −1 (C \ {0}) is an open subset of Cn (u R2n ).
Moreover, if we look at matrix product as a combination of coordinate
wise multiplication, we can judge that this product is smooth.
Consequently, the process of generating the inverse of a matrix is a
smooth function. Hence, GL(n, C) is a Lie group.
Every closed subgroup of Lie group G is a Lie group. But the definition
of linear Lie group implies that every matrix Lie group indeed is a Lie
group, since it forms a closed subgroup of GL(n, C) for some n.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
32 / 36
Matrix Lie groups are Lie groups
GL(n, C) is a Lie group
We know that det : Mn (C) → C is a continuous map; therefore,
GL(n, C) = det −1 (C \ {0}) is an open subset of Cn (u R2n ).
Moreover, if we look at matrix product as a combination of coordinate
wise multiplication, we can judge that this product is smooth.
Consequently, the process of generating the inverse of a matrix is a
smooth function. Hence, GL(n, C) is a Lie group.
Every closed subgroup of Lie group G is a Lie group. But the definition
of linear Lie group implies that every matrix Lie group indeed is a Lie
group, since it forms a closed subgroup of GL(n, C) for some n.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
32 / 36
The tangent space of Lie groups
SO(2) is nothing but the simplest manifold, a circle! For each matrix
A ∈ so(2), we have that
0 a
A=
for some a ∈ R.
−a 0
So so(2) is bijective with R
The tangent line at the identity of the group SO(2) is bijective with so(2).
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
33 / 36
Indeed, general theory of Lie groups shows that for each Lie group G,
the tangent space of G at the identity of the group is bijective with a Lie
algebra.
Specially for matrix Lie group G, the tangent space of G at the identity
of the group is bijective with g.
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
34 / 36
References.
H ALL , B RIAN C., Lie groups, Lie algebras, and representations. An
elementary introduction. Graduate Texts in Mathematics, 222.
Springer-Verlag, New York, 2003.
S EPANSKI , M ARK R., Compact Lie groups. Graduate Texts in
Mathematics, 235. Springer, New York, 2007.
S TILLWELL , J OHN, Naive Lie theory. Undergraduate Texts in
Mathematics. Springer, New York, 2008.
W ESTRA , D. B., SU(2) and SO(3),
http://www.mat.univie.ac.at/ westra/so3su2.pdf.
Cartoons from http://thenoisychannel.com
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
35 / 36
Thank You!
Mahmood Alaghmandan (U of S)
Matrix Lie groups and their Lie algebras
March 2012
36 / 36