Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
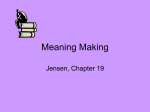
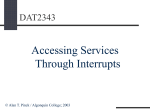
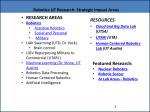
Embedded Systems Sensors and Odometry Laboratory for Perceptual Robotics – Department of Computer Science Sensing vs. Perception transducers - devices that convert some physical phenomenon into electrical signals A/D conversion - the conversion from analog signal (0-5V) into a fixed precision (typically 8-12 bits) digital representation perception - the interpretation of signals derived from transducers in order to estimate state information required for control. observability - if state x(t0) can be determined given measurements z(t) in the interval between t0 and t1, then x(t0) is observable. If x(t) is observable for all t, x is completely observable. controllability - a system is controllable at time t1>t0 if a suitable control u(t) can be found to drive the system from an arbitrary x(t0) to another arbitrary state x(t1). Laboratory for Perceptual Robotics – Department of Computer Science 2 Reconstruction Stimulus = f(World) World = f-1(S) • function, f(), is only partially known, • in general, the inverse of f() is not well-conditioned • time spent “perceiving” often renders world models obsolete Laboratory for Perceptual Robotics – Department of Computer Science 3 Embodied Perceptual Systems rich sensor feedback interaction time series feedback knowledge can fill in inaccessible detail Laboratory for Perceptual Robotics – Department of Computer Science 4 Sensor Drivers and Interface Circuitry photosensors, micro switches, microphones, pyroelectric, near IR reflectance, sonar, strain gauges, gyroscopes, accelerometers, force, compasses, vision,... sensitivity S - a property of the transducer and describes the x (physical quantity) that is required to produce a r (change in response)... r/r = S (x/x) range, R - the range in the observable quantity x that maps onto the 0-5 V transducer output resolution - the smallest x that can be observed, i.e., R/255 (linear transducer and 8-bit A/D). Laboratory for Perceptual Robotics – Department of Computer Science 5 Light Sensors - Photoresistor voltage divider Vsignal = (5V) RR/(R + RR) • choose R=RR when ambient light is midrange • Cadmium Sulfide (CdS) • cheap Laboratory for Perceptual Robotics – Department of Computer Science 6 Light Sensors - Phototransistor greater sensitivity Laboratory for Perceptual Robotics – Department of Computer Science 7 Light Sensors - Pyroelectric Sensors lithium tantalate crystal is heated by thermal radiation inducing charge tuned to 8-10 m radiation - respond to human IR signature motion detecting burglar alarm Eltec 442-3 sensor - two elements, Fresnel optics, output proportional to the difference between the charge on the left crystal and the charge on the right crystal. Laboratory for Perceptual Robotics – Department of Computer Science 8 Other Common Sensor Technologies Force • • • • • strain gauges - foil, conductive ink piezoelectric films conductive rubber capacitive force rheostatic fluids Sound • microphones • sonar Position • • • • microswitches shaft encoders gyros tilt/compasses Proprioceptive • battery-level • motor current - stall, external force • temperature Laboratory for Perceptual Robotics – Department of Computer Science 9 Odometry photoreflectors Laboratory for Perceptual Robotics – Department of Computer Science 10 Odometry - photoreflectors Laboratory for Perceptual Robotics – Department of Computer Science 11 Odometry Project - 3 lab meetings Breadboard P5587, measure output properties, monitor output with HandyBoard Interrupt-based pulse counter, build simple/quadrature encoder Estimate (x,y,t), servo--rotate, translate scheme sensor signal +5V supply ground Laboratory for Perceptual Robotics – Department of Computer Science 12 Quadrature Encoder Laboratory for Perceptual Robotics – Department of Computer Science 13 6811 System Interrupt Structure Timer-counter hardware is connected to 6811 port A - IC3 register associated with PA0 can generate interrupt every rising edge. System interrupts - 1000 Hz, used for OS time keeping and other periodic functions (LCD display) Binary programs can install themselves into the system interrupt structure 6811 interrupt vector points to run-time interrupt handlers User can hijack the pointer and use it to point to a user defined handler, and arrange it so that after the user handler completes, it goes to the run-time interrupt code. Laboratory for Perceptual Robotics – Department of Computer Science 14 6811 System Interrupt Structure At end of every fetch-decode-execute cycle: CPU checks enabled interrupts iff interrupt Save registers, flags, pgm counter Load interrupt vector into pgm counter Execute interrupt code RTI - restore and resume Masking - interrupts can interrupt interrupts Laboratory for Perceptual Robotics – Department of Computer Science 15 6811 System Interrupt Structure dedicated RAM location 6811 interrupt vector before user installation IC system Software interrupt driver RTI Laboratory for Perceptual Robotics – Department of Computer Science 16 6811 System Interrupt Structure dedicated RAM location 6811 interrupt vector user asm program JMP after user installation IC system Software interrupt driver RTI Laboratory for Perceptual Robotics – Department of Computer Science 17 Example: Photoreflector * 6811 registers TOC4INT equ $BFE2 * digital input register DIGIN equ $7000 org Port #include <6811regs.asm> Compile time strings equated to all 6811 registers and interrupt vectors MAIN_START * Variables accessible from C variable_dir fdb 1 variable_count 0 * Interrupt code called at 1000 Hz interrupt_code_start: ldab DIGIN ; accumulator B = (current value of DIGIN port) andb #1 ; accumulator B = (accumulator B) & 1 * Internal variables (not accessible from C) eorb state ; accumulator B = (state changed) ? 1 : 0 state beq interrupt_code_exit ; branch if there is no change in state * Install module into 1KHz IC system interrupt on TOC4 subroutine_initialize_module: ldd TOC4INT ; ptr to original vector std interrupt_code_exit+1 ; install for our exit ldd #interrupt_code_start ; ptr to our routine std TOC4INT ; install at TOC4 int eorb state ; accumulator B = (accumulator B) ^ state stab state ; save accumulator B to state ldd variable_dir ; load value to inc/dect from global variable * Reset variables addd variable_count ; accumulator D = (accumulator D) + variable_dir Laboratory fdb fdb 0 ldd #0 std variable_count ldd #1 std for ldab variable_dir Perceptual DIGIN subroutine initialize std module variable_count begins init. portion of user pgm interrupt_code_exit: jmp ; update variable count $0000 Robotics – Department of Computer Science 18 Creating Binaries (.icb files) from Assembly Code (.asm files) The icb.sh script provided in the /as11 directory is used to create executable binaries from your assembly code. For example, to compile a binary version of the quadrature encoder: > sh icb.sh qencdr_10_12 reads qencdr_10_12.asm and produces the binary output file qencdr_10_12.icb. Creating a .lis file Multiple files can be loaded simultaneously by making a .lis file that you can load from the IC command prompt. In this file, list each filename you want loaded into the Handy Board. Load the .lis the same way that single files are loaded onto the HandyBoard. Laboratory for Perceptual Robotics – Department of Computer Science 19