Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Genetic algorithm wikipedia , lookup
Fuzzy concept wikipedia , lookup
Kevin Warwick wikipedia , lookup
Fuzzy logic wikipedia , lookup
The City and the Stars wikipedia , lookup
Visual servoing wikipedia , lookup
Self-reconfiguring modular robot wikipedia , lookup
List of Doctor Who robots wikipedia , lookup
Ethics of artificial intelligence wikipedia , lookup
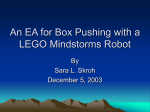
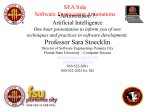
Vol. 4 • No. 1 • 2012 • ISSN: 0975-3176 • pp. 1-18 IJAAIES © International Science Press: India REVIEW AND ANALYSIS OF DIFFERENT METHODOLOGIES USED IN MOBILE ROBOT NAVIGATION D. R. Parhi* and Alok Kumar Jha* Abstract: Robot navigation is a fundamental problem in robotics. Navigation associated to mobile robot is the problem of finding a feasible path form one configuration to another by avoiding the obstacles along its path. Various approaches have been developed to cope with this problem and still researchers are keen to develop the new techniques which would make the process smoother and faster. Selection of the suitable method depends on the application and the working environment as not even a single approach guarantees for the optimal result in any kind of workspace. Therefore the choice of approach has become a demanding task. Combination of different approaches also used in order to make the local as well as global navigation system more effective. This paper provides an overview on different methodologies used for the successful navigation of mobile robot in last few decades. The paper focuses on the reactive navigation techniques based on as Neural Network, Fuzzy Logic, Neuro-Fuzzy, Fuzzy-Neuro, Genetic Algorithm, and biologically inspired techniques like Ant Colony Optimization (ACO) algorithm, Particle Swarm Optimization (PSO) Algorithm, and Bacteria Foraging Optimization Algorithm (BFOA) and Bees Algorithm (BA). Keywords: mobile robot, navigation, mobile robot navigation, biologically inspired algorithms. 1. INTRODUCTION Robot navigation is a fundamental problem in robotics. Navigation related to mobile robot is the ability of finding a collision free path from its starting position to the goal position by avoiding the obstacles. Moreover the selected path should be optimized (i.e. having smallest possible distance and minimum number of turns) to make sure that least amount of energy and time are used by the robot in roaming from starting point to its target. A lot of research work has been carried out in order to solve this problem. Mobile robots find a wide range of application in industries, hospitals, museums, and in the military, due to their greater mobility. In order to navigate successfully in an unknown or partially known environment without any human assistance, the mobile robots should be able to extract the necessary information from the environment, use their built-in knowledge for perception and to take the action required to plan a feasible path for collision free motion and to reach the goal. The navigation approaches of mobile robots can be classified as global path planning and local path planning. In case of global path planning the robot has complete prior information about the shape, location, orientation, and even the arrangements of the obstacles in the environment. It uses some optimization algorithms to minimize the cost of search and can work in static environment only. On the other hand, in local path planning, robot uses some reactive approaches such as artificial neural network, fuzzy logic controller, neuro-fuzzy and fuzzy-neuro strategies etc. to recognise the environment based on the data collected from the different sensors and have the ability to plan a path online. The roadmap approach such as visibility graphs and voronoi diagrams to robot path planning is the one of the earliest methods but its uses is always being limited to the stationary and totally known environment (Piaggio and Zaccaria, 1998). (Milos Seda, 2007) have presented a comparison on cell decomposition and roadmap methods with respect to their time complexity and proposed applications of the Voronoi diagrams to general and 8-directional motion planning. Artificial potential field has been used for * Research Scholar, Dept. of Mechanical Engineering, NIT Rourkela, Odisha India, E-mail: [email protected], [email protected] 2 D. R. Parhi and Alok Kumar Jha obstacle avoidance during the last few decades. The concept of artificial potential field for avoiding the obstacles was first developed by Khatib (1985). The approach has got quick attention of the researchers to overcome the limitations associated with the approach such as trap situation local minima, oscillations near the closely spaced obstacles, and in the narrow passages. In past few years the paradigm is shifted towards the reactive approaches for motion control of mobile robot, so that the robot can cope with the real-time situations. Artificial neural network (Meng Min and Nak, 1993; Glasius, Komoda, and Stan 1994; Yang and Meng, 2000; Dongbing and Huosheng, 2002; Janglova, 2004; Harb, Abielmona, and Naji, 2004; Velagic, Osmic, and Lacevic, 2008] and fuzzy logic controllers [Khatib and Saade, 2003; Hseng and Li, 2003; Cuestaa et al., 2003] have been used in order to offer intelligence to the mobile robot. In recent years a lot of work has been reported in the literature using bio-inspired approaches such as genetic algorithms [Kang, Hashimoto, and Harashima, 1995; Han, Baek, and Huc, 1997] particle swarm optimization algorithms [Raja and Pugazhenthi, 2009], ant colony algorithms [Cong and Ponnambalam, 2009; Chen and Ting 2006; Tan, He, and Sloman, 2009], and bacteria foraging optimization algorithm [Abraham et al., 2008; 2009; ], to solve the path planning and navigation control problems related to mobile robot in recent years. In the current research different methodologies have been taken into consideration. They are as follows: (a) Potential field method (b) Neural network based navigation (c) Fuzzy logic based navigation (d) Fuzzy-neuro based navigation (e) Neuro-fuzzy based navigation (f) Biologically-inspired approaches 2. ANALYSIS OF DIFFERENT METHODOLOGIES FOR MOBILE ROBOT NAVIGATION 2.1. Potential Field Method Andrews and Hogan (1983) and Khatib (1985) have been suggested the idea of imaginary forces acting on a robot in such a way that the robot has been attracted by its target and obstacle exerts repulsive forces on it. Therefore resultant force governs the following direction and speed of travel. Most of researchers have been attracted towards this approach because of its mathematical elegance and simplicity but it can be used mostly in a stationary environment where the obstacles and the target are stationary. Borenstein and Koren (1991) have presented a systematic overview and discussed about the inherent drawbacks of potential field methods (PFMs). They have addressed the four significant problem related to PFM, which include 1. Trap situation due to local minima (it occurs when the robot reached into a U-shaped obstacle). 2. No passage between closely spaced obstacles (when two obstacles are presents very near to each other, then the robot may repelled away from the obstacles). 3. Oscillations in the presence of obstacles and 4.Oscillations in the narrow passages. Moreover they have developed a new method namely vector field histogram (VHF) method which gives smooth, non-oscillatory motion and can be used for fast obstacle avoidance. Cosio and Castaneda (2004) have presented a new scheme for autonomous navigation of mobile robot based on improved artificial potential field and genetic algorithm (GA). They have used the concept of multiple auxiliary attraction points so that the robot can overcome the trap situation and avoid the closely spaced obstacles. The intensity of attractive and repulsive forces along with the position parameter of the auxiliary attraction point has been optimized by the GA. Ten different paths in three Review and Analysis of Different Methodologies used in Mobile Robot Navigation 3 different unknown obstacle arrangements with a success rate of 93.30% have been reported. The total estimated processing time found to be within acceptable robot speed values for real applications. Huang (2009) Addressed a new technique, derived from the classical potential filed method, for the velocity planning of a mobile robot in a dynamic environment where the target and obstacles are moving. The method ensures that the robot successfully tracks the moving target by avoiding the obstacles along its path, by providing the direction and the speed of the robot. Olunloyo and Ayomoh (2009) have presented a path planning and obstacle avoidance approach for a mobile robot in a partially known 2-D environment. The proposed method named Hybrid Virtual Force Field (HVFF) integrates the virtual force field method (VFF), the virtual obstacle concept (VOC) and the virtual goal concept (VGC). The proposed algorithm guarantees the solution to the inherent limitations associated with the traditional VFF approach. 2.2. Neural Network Based Navigation A neural network is a massive system of parallel distributed processing elements (neurons) connected in a graph topology. Learning in the neural network can be supervised or unsupervised. Supervised learning uses classified pattern information, while unsupervised learning uses only minimum information without preclassification (Janglova, 2004). Meng and Nak (1993) have developed a new kind of reasoning and control architecture (see Fig. 1.) for vision-guided navigation that makes a robot more alike to human. They have developed a new system called NEURO-NAV, discard the more traditional geometrical representation of the environment, and instead use a semantically richer nonmetrical representation in which a hallway is modelled by the order of appearance of various landmarks and by adjacency relationships. The capability of the robot to Figure 1: Architecture of NEURO-NAV 4 D. R. Parhi and Alok Kumar Jha respond to human supplied commands such as “Follow the corridor and turn right at the second T junction” is achieved by an ensemble of neural networks whose activation and deactivation are controlled by a supervisory controller that is rule-based. Glasius, Komoda, and Stan (1994) have proposed a model for path planning and obstacle avoidance based on an analog neural network. The network was a large collection of locally and symmetrically connected elementary processors. The evolution of the network is given by parallel-discrete or continuous time –dynamics. The analytical results are supported by the computer simulation to illustrate the performance of the network. Thrun (1995) has described an approach to learning an indoor navigation task through trial and error. Explanation-based neural network learning algorithm has been applied in the context of reinforcement learning, which allows the robot to learn control using dynamic programming. Ortega and Camacho (1996) have presented a way of implementing a model-based predictive controller (MBPC) for mobile robot navigation when unexpected static obstacles are present in the robot environment. The method uses a nonlinear model of mobile robot dynamics, and thus allows an accurate prediction of the future trajectories. A sonar range system has been used for the obstacle detection. A LABMATE mobile robot has been used as a test bed for the experiments. The ANN has been trained in a supervised way using a back-propagation algorithm. The predictive control strategy used here allows the use of previously computed reference paths and avoids some of the problem found with reactive methods. This approach has also the great advantage of processing the sensor data in real time, feeding the sonar readings directly to the neural-network input by avoiding a high level data processing. Floreano and Mondada (1998) have described a methodology for evolving neuro-controllers of autonomous mobile robots without human intervention. Jaksa, Sincak, and Majernik (1999) have described the application of both, supervised and reinforcement learning approaches in task of mobile robot navigation. They have used same experimental environment for both the cases. They found that it’s possible to use classical layered feedforward neural networks with back-propagation learning algorithm as critic networks in reinforcement learning. Zamarreno and Vega (1999) have presented an approach for model-based constrained predictive control (NPC), in which a recurrent neural network is used as a non-linear prediction model. The proposed NPC can deal with non-linear systems and constraints in the system variables. Yeng and Meng (2000) have proposed a novel biologically inspired neural network approach to real-time collision-free motion planning of mobile robots or robot manipulators in a non-stationary environment. The optimal robot motion they have planned through the dynamic neural activity landscape of the biologically inspired neural network without any prior knowledge of the dynamic environment and without any learning procedures. The system stability is guaranteed by both qualitative analysis and the Lyapunov stability theory. Gu and Hu (2002) have presented a new path tracking scheme for a car-like mobile robot based on neural predictive control. A multi layer back propagation neural network is employed to model non linear kinematics of the robot. The neural predictive control for path tracking is a model based predictive control based on neural network modelling, which can generate its output in terms of the robot kinematics and a desired path. The multi layer back propagation neural network is constructed by a wavelet orthogonal decomposition to form a wavelet neural network that can overcome the problem caused by the local minima when training the neural network. They have provided simulation results for the modelling and control to justify their proposed scheme. Janglova (2004) has dealt with a path planning and intelligent control of an autonomous robot which moves, safely in partially structured environment. They have described their approach to solving the motion-planning problem in mobile robot control using neural networks-based technique. Their method for the construction of a collision-free path for moving robot among obstacles is based on two neural networks. The first neural network is used to determine the “free” space using ultrasound range finder data. The second neural network “finds” a safe direction for the next robot section of the path in the workspace while avoiding the nearest obstacles. He presented simulation examples of generated path with his proposed technique. Harb et al. (2008) have discussed the local navigation of a mobile robot performing Review and Analysis of Different Methodologies used in Mobile Robot Navigation 5 environmental recognition in industrial applications. For environmental recognition two neural networks, NN1 and NN2 were designed, trained, and tested. They only focused on the NN1 that can recognize seven standard subspaces such as corridor, crossroad, frontal T-shaped crossroad, left junction T-shaped crossroad, right junction T-shaped crossroad, left corner, and right corner. For local navigation, they designed and trained three neural controllers, viz. ‘Keep Right’, ‘Keep Left’ and ‘Pass a Cross-Road’ to perform real-time direction control and obstacle avoidance. Jasmin, Nedim, and Bakir (2008) have designed a neural network based controller for motion control of a mobile robot. They treated the problem of trajectory following and posture stabilization of the mobile robot with non holonomic constraints. They have used recurrent neural network with one hidden layer for the purpose. It learns relationship between linear velocities and error positions of the mobile robot. This neural network is trained on-line using the back-propagation optimization algorithm with an adaptive learning rate. The optimization algorithm is performed at each sample time to compute the optimal control inputs. The performance of the proposed system is investigated using a kinematic model of the mobile robot. Engedy and Horvath (2009) have described a dynamic artificial neural network based mobile robot motion and path planning system. They presented a mobile robot navigation solution based on the extended back-propagation through time algorithm, which uses potential fields for obstacle avoidance. Moreover the proposed method could avoid moving obstacles, and needs no precise model of the robot. Markoski et al. (2009) have described the concept of the navigation system using navigation algorithm based on self-learning neural network to form the movement path of the mobile robot towards the target. The robot was equipped with the sonar, light sensors, mechanical touch sensors mounted around robot, PIR passive infrared motion detectors and digital compass. Ouarda (2010) has presented a neural network based approach for positioning and autonomous navigation of mobile robot wherein the robot can autonomously head for destination cells in a grid from its starting position and orientation. The general structure of the proposed neural network approach is shown in Fig.2. This structure consists of three levels viz. Knowledge mapping, Action, and Reinforcement learning. Figure 2: General Structure of Neural Network Navigation 6 D. R. Parhi and Alok Kumar Jha Wahab (2009) has dealt with the motion planning problem in mobile robot control using artificial neural network technique. Based on two neural networks, the algorithm constructs a collision free path for mobile robot in the presence of obstacles. The first neural network has been used for the determination of the free space to avoid the obstacles, while the second one to navigate the robot into target. 2.3. Fuzzy Logic Based Navigation Barret, Benreguieg, and Maaref (1997) have proposed a sensor-based navigation algorithm, combines two types of obstacle avoidance behaviours, each for the convex obstacles and the concave ones. To avoid the convex obstacles the navigator uses either fuzzy tuned artificial potential field (FTAPF) method or a behavioural agent, however an automatically online wall-following system using a neuro-fuzzy structure has been designed for the concave one. Xu (2000) has proposed a virtual target approach for resolving the limit cycle problem in navigation of a behaviour-based mobile robot. The real target has been switched to a virtual location so that robot can navigate according to the virtual target until it detects the opening. The efficiency and effectiveness of the refined fuzzy behaviour-based navigation are demonstrated by means of both simulation and physical experiments. Aguirre Eugenio and Gonzalez Antonio (2000) dealt with a hybrid deliberative-reactive architecture for mobile robot navigation for integrating planning and reactive control, and attention is focused on the design, coordination and fusion of the elementary behaviours. Saade and Khatib (2003) have developed a data-driven fuzzy approach to provide a general framework for solving the Dynamic motion problem (DMP) problem of a mobile robot under some constraints. The main advantage of the current approach over recent fuzzy-genetic one is that the robot can navigate successfully in the presence of moving obstacles and independently of the number of these obstacles. The proposed approach has also reveals the reduction in the travel time. The proposed algorithm has shown good results as compared to ANFIS on robot trajectory in terms of their length and the time required by the robot to reach the goal. The superiority of the new algorithm can be helpful in building fuzzy models without any compulsion of planting effort in gaining accurate and enormous number of data points. Li and Hseng (2003) have designed and implemented a new fuzzy controller for a car-like mobile robot (CLMR) that holds autonomous garage-parking and parallel-parking capacity by using real time image processing. The system consists of a host computer, a communication module, a CLMR, and a vision system. Fuzzy garage parking control (FGPC) and fuzzy parallel parking control (FPPC) have been used in order to control the steering angle of the CLMR. Cuesta et al. (2003) have presented a new method for the intelligent control of the nonholonomic vehicles. Fuzzy perception has been directly used, both in design of each reactive behaviour and solving the problem of behaviour combination in order to implement a fuzzy behaviour based control architecture. The capabilities of the control system have been improved by considering teleoperation and planned behaviour, together with their combination with reactive ones. Experimental results have shown the robustness of the suggested technique. Abdessemed Foudil, Benmahammed Khier, and Monacelli Eric (2004) have used the fuzzy logic controller in the development of complete navigation procedure of a mobile robot in a messy environment. An evolutionary algorithm has been implemented in order to solve the problem of extracting the IF-THEN rule base. The validity of the proposed method has been demonstrated through simulation results. Demirli and Molhim (2004) have presented a new fuzzy logic based approach for dynamic localization of mobile robots. The proposed approach uses sonar data obtained from a ring of sonar sensors mounted around the robot. The angular uncertainty and radial imprecision of sonar data are modelled by possibility distributions. The information received from the adjacent sonar sensors are united, which helps in the reduction in the uncertainty in sonar impressions. In the beginning a local fuzzy map has been constructed with help of reduced models of uncertainty, and then fitted to the given global map of the environment to identify robot’s location. This fit offers either a unique fuzzy location or multiple candidate fuzzy locations. Since the coordinates (x, y) and Review and Analysis of Different Methodologies used in Mobile Robot Navigation 7 orientation of the identified locations are represented by possibility distribution, these locations are referred to as fuzzy locations. To reduce the number of candidate locations, a new set of candidate fuzzy location is obtained by moved the robot to a new position. By considering the robot’s movement, a set of hypothesized locations is identified from the old set of candidate locations. The hypothesized locations are matched with the new candidate locations and the candidates with low degree of match are eliminated. This process is continued until a unique location is obtained. The matching process is performed by using the fuzzy pattern matching technique. The proposed method is implemented on a Nomad 200 robot and the results are reported. Parhi (2005) has described a fuzzy logic based control system for the navigation of multiple mobile robots in a cluttered environment, such that the robots do not collide to each other. For this he has used fuzzy logic controller to combine the fuzzy rules in order to direct the steering of the robot to avoid the obstacles present in its path. Moreover Petri Net model has been used by implementing crisp rules to avoid the collision between the different mobile robots. Simulation and test results validate the system functions by enabling the robots to reach their goal without hitting the static obstacles or colliding with other robots. Fatmi et al. (2006) have demonstrated a successful way of constructing the navigation task in order to deal with problem of autonomous navigation of mobile robot. Issues of individual behaviour design and action coordination of the behaviours were addressed using fuzzy logic. They have designed the individual behaviours like goal reaching; emergency situation, obstacle avoidance, and wall following are presented using fuzzy if-then rule base. Moreover they have introduced a coordination technique to overcome the problem of activation of several behaviours independently or/and simultaneously. Mendez and Madrigal (2007) have proposed a user adaptive fuzzy based navigation system for the autonomous navigation of mobile robot in unknown environments. They have tested their system in a pioneer mobile robot and on a robotic wheel chair, equipped with PLS laser sensor for the detection of obstacles and odometry sensors for the localization of the robot and the goal positions. The proposed system has a learning algorithm that can quickly adapt to different users. They have found that the proposed system takes 90% less computation time for the task as compared to others reactive control tested in the same platform for the previous system. Hassanzadeh, Ghadiri, and Dalayimilan (2008) have used a simple fuzzy controller for obstacle avoidance of mobile robot navigation. The block diagram of the controlled system is shown in Fig. 3. Figure 3: Block Diagram of Controlled system Sensory data plus the direction of the robot wheel have been supplied to the fuzzy controller as the input variables and the right velocity (VR) and left wheel velocity (VL) are the output variables of the fuzzy controller as shown in Fig. 4. Rules of fuzzy controller become characterized as follows: If (Sensor Value is A) and If (Direction is B) Then (VL is C) and (VR Is D) The main features of this algorithm are as follows: • In the proposed fuzzy method, the inputs are the robots direction towards the target and the sensor values, and the outputs are the wheel speeds. If the target is dynamic and changes its position the robot will still be able to follow it. 8 D. R. Parhi and Alok Kumar Jha • The number of rules in the proposed fuzzy method is a dramatically little. This shows that the required number of calculations will be reduced. Figure 4: Block Diagram of the Fuzzy Controller The method provides smooth navigation due to selected type of membership function, and capability to following the dynamic target. The results obtained from the proposed method along with that of the fuzzy approach were compared with the results of potential field method for robot navigation and the proposed method found better than potential field. They have implemented the proposed method on a khepera II mobile robot. Results show the effectiveness of the new algorithm. Moreover the robot can reach to its target in a shorter time by using the new fuzzy method as compared to potential field method. 3.4. Fuzzy-Neuro Based Navigation Song and Sheen (2000) have presented a heuristic fuzzy-neuro network based novel approach for the reactive navigation of the mobile robot. A pattern recognition approach based on real time sensory information has been developed and successfully implemented on an autonomous mobile robot. The proposed fuzzy neural network include small number of rules, amount of computation is therefore reduced which results in faster response to unexpected events. Moreover the proposed system allows the continuous fast motion of the mobile robot without any need to stop for obstacles. They have demonstrated the effectiveness of the proposed method by conducting a set of experiments on the mobile robot. Ma, Li, and Hong (2001) have presented a hybrid method for the motion control of mobile robot in an unknown environment. Fuzzy interface with neural network has been used for the learning real time self-reaction of mobile robot. Efficient control of the mobile robot can be achieved by the proposed technique based on different sensing information. They have demonstrated the validity of their proposed method through simulation results. Er, Tan, and Loh (2004) have developed a fuzzy neural controller based on Generalized Dynamic Fuzzy Neural Networks (GDFNN) and successfully implemented on Khepera II mobile robot. The parameters of the fuzzy system can be adjusted, also the structure of the fuzzy system can be self-adaptive i.e. robot can adjusted itself to the desired behaviour. The experiment result shows that the performance of the proposed controller is superior to the conventional fuzzy logic approach. (He, Sun, and Cheng, 2008) have used fuzzy neural network based on Takagi-Sugeno model for avoiding obstacles. It not only has the advantage of fuzzy logic and neural network, but also has good self-study ability. The navigation algorithm based on T-S had been implemented using computer simulation and obtain satisfactory results. They Review and Analysis of Different Methodologies used in Mobile Robot Navigation 9 have compared their test results between back-propagation and T-S model used in avoiding obstacles. Simulation results shows that the T-S method can make the mobile robot arrive to the destination with a lower consumption and more effectively. Nurmaini, Hashim, and Jawawi (2009) have dealt with type-2 fuzzy-neural controller using RAM based network for navigation of mobile robot.Type-2 fuzzy-neural base RAM networks offered small, high-speed solutions. The proposed architecture uses low cost range sensor and low cost microprocessor. The experiment results show that the source code is efficient, works well, and the robot was able to successfully avoid the obstacles. Ganpathy (2009) have used fuzzy Logic (FL) and Artificial Neural Network (ANN) for the motion planning of autonomous mobile robot such that it can reach the desired goal by avoiding the obstacles. Path remembering algorithm and the virtual wall building method has been proposed to help the mobile robot to come out from the acute obstacles, and to prevent the mobile robot turn back into the same acute obstacle once it has been turned away from the wall respectively. The performance of the algorithms is compared and it is found that the best combination of the algorithms is obtained when obstacle avoidance behaviour is controlled by ANN and wall following behaviour is controlled by FL to avoid acute obstacles. The results obtained from both simulation and real time application validated the feasibility and the robustness of the controllers. 3.5. Neuro-Fuzzy Based Navigation Marichal et al. (2001) have proposed a neuro-fuzzy strategy to drive a mobile robot. The proposed system consists of a three layer neural network which is able to extract automatically a set of fuzzy rules in order to control the motion of the mobile robot. The information needed to obtain the fuzzy rules is provided by a set of trajectories with human assistance. They have employed their system into simulation and achieved satisfactory results. Hui, Mahendar, and Pratihar (2006) have developed a number of neuro-fuzzy approaches in order to determine timeoptimal, collision-free path of a car-like mobile robot navigating in a dynamic environment. They have developed three different neuro-fuzzy approaches and compared their performance among themselves and with those of three other approaches such as default behaviour, manually-constructed FLC and potential field method, through computer simulations. The developed neuro-fuzzy approaches are found to perform better than the other approaches in comparatively low time. Tahboub and Munaf (2009) have presented a reasoning scheme based on neuro-fuzzy for mobile robot navigation. They have decomposed a multidimensional fuzzy system into a set of simple parallel neural networks. The proposed method has an advantage of reducing no. of if-then rules by introducing weighing factors for sensor inputs. They have used four neural networks for the determination of weighing factors, such that each NN is responsible of determining weighing factor for one sensor input. The proposed approach has been tested through a number of simulated case problems and found to be achieving the reaching target by avoiding the obstacles and showed the capability to escape from simple traps. Demirli and Khoshnejad (2009) have developed a neuro-fuzzy model for autonomous parallel parking of a CLMR with assistance of sensory information. 2.6. Biologically-inspired Approaches In this section of the paper, approaches inspired from the nature have been discussed. Several biologically inspired approaches such as Genetic algorithm, particle swarm optimization, bacteria foraging optimization, ant colony etc. are being developed in past decades to provide superior end result to navigation problem. Moreover these algorithms gain attention of the researchers due to their social and cooperative behaviour which results in faster computation. 2.6.1. Genetic Algorithm Kang, Hashimoto, and Harashima (1995) have proposed a novel genetic algorithm to optimized or generate a path for a mobile robot in a known environment. It has been shown that the proposed method found optimal path very quickly as compared to conventional method like Distance transform method and Global path generation 10 D. R. Parhi and Alok Kumar Jha by dynamic programming through simulation results. Han, Back, and Kuc (1997) have proposed a simple path planning scheme using genetic search approach for navigation of mobile robot in dynamic environment. Yang and Tu (2003) have presented a novel genetic algorithm based approach with a variable length chromosome for path planning of a mobile robot. Sedighi et al. (2004) have developed a GA based path planning algorithm for autonomous path planning of a mobile robot in a given search space. The proposed method is capable of avoiding local obstacles and provides the optimal path by decrease the path length and number of turns. They have developed a new genotype which was able to plan both row-wise and column-wise within a single search space. Therefore the path has more flexibility to switch between to modes and can work in complex environment. The coding applied by them consists of four variables: Path-Flag, Path-Locution, Path-Direction, and PathSwitch. The performance of the algorithm has been tested on an actual robot. 2.6.2. Ant Colony Optimization Algorithm Over the last few years bio-mimetic approaches such as Ant Colony Optimization (ACO) algorithms, Bacteria Foraging Optimization Algorithms (BFOA), Artificial Immune System (AIS) based algorithm, Particle Swarm Optimization (PSO) algorithms etc. have been succeeded to gain the attention of many researchers. ACO is a search algorithm, inspired by the way real ants forage for their food in random directions and find an optimum distance between the food source and their nest through indirect communication with one another by making adjustments to the concentration of highly volatile chemicals called pheromones in their proximate environment. Dorigo, Maniezzo, and Colorni (1996) have suggested a new computational method named Ant System (AS) and applied to classical travelling salesman problem (TSP). Moreover they have shown the robustness of the system by applied it to some other optimization problem such as asymmetric TSP, the quadratic assignment, and the job-shop scheduling. ACO (Cong and Ponnambalam, 2009) and improved ACO (Chen and Ting, 2006) have been successfully applied to solve the mobile robot path planning problem. Zheng, Huan, and Aaron (2007) have presented a novel approach for the global path planning of mobile robot in real time. The method consists of three steps: in first step, the free space model of the mobile robot has been prepared with the help of MAKLINK graph theory, then Dijkstra algorithm is used to find a sub-optimal collision free path, finally the established ant colony system algorithm is utilized to optimize the location of the sub-optimal path so as to generate the globally optimal path. 2.6.3. Particle Swarm Optimization Algorithm Particle swarm optimization (PSO) developed by Eberhart and Kennedy in 1995 is a bio mimetic approach inspired from the social behaviour of the flocks of birds or schools of fish. In PSO, each particle is having its own local best position and changes their velocity and direction after each time step towards the global best position subject to the location of the best fitted particle in the swarm. This balance between the global and local search all together during the complete process, makes the PSO a popular optimization algorithm. PSO has been successfully applied in numerous areas including localization (Kwok, Liu, and Dissanayake, 2006), and path planning of mobile robots in static as well as in dynamic environment. Raja and Pugazhenthi (2009) have presented a PSO based path planer for mobile robots in dynamic environments. They have considered the obstacles of different shapes with varying velocities for the simulation studies. In their proposed method, only realistic paths have been generated and then subjected to PSO to obtain collision free optimal path. This leads to solution convergence in fewer generations and avoids the penalty function evaluation design. 2.6.4. Bacteria Foraging Optimization Algorithm As other swarm intelligence algorithms, bacteria foraging optimization algorithm (BFOA) is inspired form the social and cooperative actions found in nature. Indeed, the way bacteria rummage around for the highly nutrient 11 Review and Analysis of Different Methodologies used in Mobile Robot Navigation regions can be seen as an optimization process. BFOA has been applied in various optimization problems associated with the real-world and therefore already gained the attention of the researchers in the domain. The swarm of bacteria S behaves as follows (Passino, 2002) • Bacteria are arbitrarily spread in the map of nutrients. • Bacteria travel towards high-nutrient regions in the map. Those get their food in sufficient, increased in length and will split into two equal parts at suitable temperature (i.e.Reproduce). Moreover those located in low nutrient region will disperse and those who situated in noxious region will die. • Bacteria situated in the promising regions of the map of nutrient will try to attract others bacteria by generating chemical attractants. • Bacteria are now located in the highest-nutrient region. • Bacteria now disperse as to look for new nutrient regions in the map. Bacteria foraging behaviour includes four main steps (1) Chemotaxis (tumble and swimming), (2) swarming (3) reproduction and (4) elimination-dispersal. 2.6.4.1. Chemotaxis In chemotaxis step the movement of E.coli cell through swimming and tumbling via flagella is simulated. Biologically the movement of E.coli bacterium is restricted into two different ways, either it can swim for a period of time in the same direction or it may tumble for the entire lifetime. In the classical BFO, a unit step in random direction represents a “tumble” and a unit step with the same direction in the last step indicates a “run”. Suppose θi(j, k, l) represents the bacterium at jth chemotactic, kth reproductive, and lth elimination-dispersal step. C(i) is the chemotaxis step size during each tumble or run. Then the movement of the ith bacterium can be modelled as θi (j+1, k, l) = θi(j, k, l) + C(i) Φ(j) (1) where C(i), (i = 1, 2,…., S) is the size of the step taken in random direction specified by the tumble. J (i, j, k, l) is the fitness, which also represents the cost at the location of the ith bacterium θi(j, k, l) õ κP. If at θi (j + 1, k, l) the cost J (i, j + 1, k, l) is better (lower) than at θi(j, k, l) , then another step of size C(i) in this same direction will be taken. Otherwise, bacteria will tumble via taking another step of size C(i) in random direction in order to seek better nutrient environment. This process leads to gathering of bacteria into the nutrient-rich areas spontaneously. 2.6.4.2. Swarming: An Interesting group behaviour has been perceived in several motile species of bacteria including E.coli and S. typhimurium. A cell-to-cell communication mechanism is established to simulate the biological behaviour of bacteria swarming. As each bacterium moves, it releases attractant to signal other bacteria to swarm towards it. Meanwhile, each bacterium releases repellent to warn other bacteria to keep a safe distance from it. BFOA simulates this social behaviour by representing the combined cell-to-cell attraction and repelling effect. Now Combined cell-to-cell attraction and repelling effects can be modelled as S J cc (θ, P ( j , k , l )) = ∑ J cci (θ, θi ( j , k , l )) i =1 S p S p i =1 m =1 i =1 m =1 = ∑ [ − d attract exp( − wattract ∑ (θm − θim ) 2 )] + ∑ [ hrepellant exp( − wrepellant exp ∑ (θm − θim ) 2 )] (2) 12 D. R. Parhi and Alok Kumar Jha where dattract and wattract are the depth and width of the of the attractant released by the cell respectively. Likewise hrepellant and wrepellant are the height and measure of the width of the repellent effect. 2.6.4.3. Reproduction For bacterial, a reproduction step takes place after all chemotactic steps. Now health of i th bacterium: i J health = N c +1 ∑ J (i, j, k , l ) j =1 (3) In reproduction step the 50 % of total bacteria (least healthy) finally die and while the others having good health will reproduce (split) to keep the bacteria strength constant. 2.6.4.4. Elimination- Dispersal Elimination event may occur due to sudden increase in the heat which results in the death of a population of bacteria that are currently in the region of high concentration of the nutrients. A sudden flow of water can disperse the bacteria from one place to another. In BFO, the dispersion event happens after a certain number of reproduction processes and some bacteria are chosen depending upon the probability to be killed and moved to another position within the environment (Abraham et al., 2008; 2009). The pseudo code for the bacteria foraging optimization algorithm (BFOA) suggested by (Passino, 2002) is presented below: Initialize the parameters viz. p, S, Nc , Ns , Nre , Ned , ped, and the C(i), i = 1, 2,…., S. (1) Elimination-dispersal loop: l = l + 1 (2) Reproduction loop: k = k + 1 (3) Chemotaxis loop: j = j + 1 (a) For i = 1, 2,…., S, take a chemotactic step for bacterium i as follows. (b) Compute J (i, j, k, l). Let J(i, j, k, l) = J(i, j, k, l) + Jcc(θi(j, k, l), P(j, k, l)) (c) Let Jlast = J(i, j, k, l) to save this value since we may find a better cost via a run. (d) Tumble: Generate a random vector ∆(i õ κp) with each element ∆m(i), m = 1, 2, ..., p, random number on [-1, 1]. i i (e) Move: let θ ( j + 1, k , l ) = θ ( j , k , l ) + C (i ) ∆(i ) ∆ (i )∆(i ) T This results in a step size C(i) in the direction of the tumble for bacterium i. (f) Compute J(i, j + l, k, l), and then let J (i, j + 1, k , l ) = J (i, j, k , l ) + J cc (θi ( j + 1, k , l ), P( j + 1, k , l )) (g) Swim (i) Let m = 0 (counter for swim length). (ii) While m < Ns (if have not climbed down too long) Let m = m+1. If J (i, j + 1, k , l ) < Jlast (if doing better), let Jlast = J (i, j + 1, k , l ) and let Review and Analysis of Different Methodologies used in Mobile Robot Navigation θi ( j + 1, k , l ) = θi ( j + 1, k , l ) + C (i) 13 ∆(i) ∆ (i)∆(i) T And use this θi ( j + 1, k , l ) to compute the new J (i, j + 1, k , l ) as we did in f). Else, let m = Ns . This is the end of the while statement. (h) Go to next bacterium (i+1) if i S (i.e. go to b) to process the next bacterium). (4) If j < Nc , go to step 3. In this case, continue chemotaxis, since the life of the bacteria is not over. (5) Reproduction: (a) For the given k and l and for each i = 1, 2,…,.S, let i J health = N c +1 ∑ J (i, j, k , l ) j =1 Be the health of bacterium i (a measure of how many nutrients it got over its lifetime and how successful it was at avoiding noxious substances). Sort bacteria and chemotaxis parameters C(i) in order of ascending cost J health (higher cost means lower health). (b) The Sr Bacteria with the highest J health values die and the others Sr bacteria with the best values split (and the copies that are made placed at the same location as their parent). (6) If k < Nre , go to step 2. In this case, we have not reached the number of specified reproduction steps, so we start the next generation in the chemotactic loop. (7) Elimination-dispersal: For i = 1, 2,….,. S, with probability ped , eliminate and disperse each bacterium(this keeps number of bacteria in the population constant). To do this, if you eliminate a bacterium, simply disperse one to a random location on the optimization domain. (8) If l < Ned, then go to step 1; otherwise end. 2.6.5. Bees Algorithm Bees Algorithm (BA) has been inspired form the food foraging behaviour of swarms of honey bees. The algorithm first developed by the Pham D.T. in 2005, performs a kind of neighbourhood search associated with random search hence can be used for both combinatorial and functional optimization. 2.6.5.1. Bees in Nature 1. A colony of honey bees can extend itself over long distances (more than 10 km) and in various directions simultaneously to exploit a large number of food sources. 2. In principle, flower patches with numerous amount of nectar or pollen that can be collected with less effort should be visited by more bees, whereas, patches with less nectar or pollen should receive fewer bees. 3. The foraging process begins in a colony by scout bees being sent out to search for promising flower patches. Scout bees travel arbitrarily from one patch to another. During the harvest season, a colony continuous its exploration, keeping a percentage of population as scout bees. 4. When the scout bees return to the hive, those that found a patch which is rated above a certain quality threshold (measured as a combination of some constituents, such as sugar content) deposit their nectar or pollen and go to the “dance floor” to perform a dance known as “waggle dance”. 14 D. R. Parhi and Alok Kumar Jha 5. The waggle dance is essential for colony communication, and contains three pieces of information regarding a flower patch: (i) The direction in which it will be found, (ii) Its distance from the hive, (iii) Its quality rating (or fitness). This information helps the colony to send its bees to flower patches precisely. 6. After the waggle dance on the dancing floor, the dancers (i.e. scout bee) go back to the flower patch with follower bees that are waiting inside the hive. More follower bees are sent to more promising patches. (Pham et al., 2006) have suggested the pseudo codes for the algorithm in a simple form is given below: (1) Initialise population with random solutions. (2) Evaluate fitness of the population. (3) While (stopping criterion not met)// Forming new population. (4) Select sites for neighbourhood search (5) Recruit bees for selected sites (more bees for best e sites) and evaluate fitnesses. (6) Select the fittest bee form each patch. (7) Allocate remaining bees to search arbitrarily and evaluate their fitnesses. (8) End while. (Karaboga and Basturk, 2008) have proposed another algorithm namely Artificial bee colony (ABC) based on a particular intelligent behaviour of honeybee swarms. In addition, performance of the ABC algorithm has been compared with that of differential evolution (DE), particle swarm optimization (PSO) and evolutionary algorithm (EA). Simulation results show that ABC algorithm performs better than the mentioned algorithms and can be efficiently employed to solve the multimodal engineering problems with high dimensionality. 3. CONCLUSIONS This paper provides an overview on different methodologies used in mobile robot navigation. Different approaches including Potential field method, Artificial Neural Network, Fuzzy Logic, Neuro- Fuzzy, Fuzzy-Neuro, Genetic Algorithm, Ant Colony, Particle Swarm and Bacteria Foraging are being reviewed, associated to mobile robot navigation. Potential field method is one of the earliest approaches used in order to avoid the obstacles present in the path of the mobile robot. It has certain limitation and hence its application is limited to the static environment. By using PFM the robot approaches to its goal position by following the maximum gradient of a particular quantity in the field. Neural Network can be used for cognition tasks such as learning, generalization, adaptation and optimization. Neural networks and fuzzy logic improve the learning and adaptation skills in varying environment where information is inaccurate, uncertain or incomplete. Neuro-Fuzzy and Fuzzy-Neuro techniques are used for path planning in static as well as dynamic environment. Indeed they offer time optimal path through inputs as distance of the obstacles presents in front, right or left side of the mobile robot. Evolutionary algorithms like GA, PSO, and Ant Systems search algorithms are used to minimize the length of the path length and number of turns. By using ACO the multiple mobile robots can find an optimal path in the same way the ant forage for their food form the nest position to the food source. PSO uses the swarm intelligence of moving particles in order to find the best positions in the search space by updating the better positions constantly in each generation. Inspired from the behaviour of the E-coli bacterium BFOA utilizes the chemotaxis, swarming, reproduction and Elimination dispersal events as optimization tool in order to optimize the desired variables in the particular course. Bees Algorithm is a population based search method inspired form the food foraging behaviour of the honey bees, performs a kind of neighbourhood search combined with random search and can be used for solving optimization problems. A generous amount of intelligence and algorithms are present in the nature, and we just need to understand them, and then practice them to provide solution to our problems. There Review and Analysis of Different Methodologies used in Mobile Robot Navigation 15 are certain steps involved in the development of a new algorithm. 1. Complete observation of the behaviour present in the nature, 2. Development of the raw model to represent the adopted behaviour and formulation a mathematical model followed by development of pseudo codes to simulate the behaviour, 3. At last we need to test the algorithm both theoretically and practically and then enhance the parameters associated with the algorithm to accomplish better performance. Moreover different behaviour should be compatible with each other therefore nature inspired algorithm may possibly hybridized together to boost itself to do faster and efficiently, indeed hybrid algorithms are robust enough to perform better in challenging situations. References [1] Piaggio Maurizio, Zaccaria Renato (1998), ‘Using Roadmaps to Classify Regions of Space for Autonomous Robot Navigation’, Robotics and Autonomous Systems, 25, 209-217. [2] Seda Milos (2007), ‘Roadmap Methods vs. Cell Decomposition in Robot Motion Planning’, In the Proceedings of the 6th WSEAS International Conference on Signal Processing, Robotics and Automation. February 16-19, 2007. Corfu Island, Greece. pp. 127-132. [3] Khatib O. (1985), ‘Real-Time Obstacle Avoidance for Manipulators and Mobile Robots’, Paper Presented at the IEEE International Conference on Robotics and Automation. March 25-28, 1985. St. Louis, Missouri. pp. 500-505. [4] Koren, Y. Borenstein, J. (1991), ‘Potential Field Methods and their Inherent Limitations for Mobile Robot Navigation’, In the Proceedings of the IEEE Conference on Robotics and Automation, April 7-12, 1991. Sacramento, California. pp. 1398-1404. [5] Cosio, F. Arambula Castaineda, M. A. Padilla (2004), ‘Autonomous Robot Navigation using Adaptive Potential Fields, Mathematical and Computer Modelling’, 40, 1141-1156. [6] Huang, L. (2009), ‘Velocity Planning for a Mobile Robot to Track a Moving Target - A Potential Field Approach’, Robotics and Autonomous Systems, 57, 55-63. [7] Olunloyo, V. O. S. and Ayomoh, M. K. O. (2009), ‘Autonomous Mobile Robot Navigation Using Hybrid Virtual Force Field Concept’, European Journal of Scientific Research, 31(2), 204-228. [8] Meng, Min and Nak, A. C. (1993), ‘Mobile Robot Navigation Using Neural Networks and Nonmetrical Environment Models’, IEEE transaction on Control System, 13(5), 30-39. [9] Roy, Glasius, Andrzej, Komoda and Stan, C. A. M. Gielen (1994), ‘Neural Network Dynamics for Path Planning and Obstacle Avoidance’, Neural Networks, 8(1), 125-133. [10] Sebastian Thrun (1995), ‘An Approach to Learning Mobile Robot Navigation’, Robotics and Autonomous Systems, 15, 301-319. [11] Ortega, J. Gomej, Camacho, E. F. (1996), ‘Mobile Robot Navigation in a Partially Structured Static Environment using Neural Predictive Control’, Control Engineering Practice, 4(12), 1669-1679. [12] Floreano, D. and Mondada, F. (1998), ‘Evolutionary Neurocontrollers for Autonomous Mobile Robots’, Neural Networks, 11, 1461–1478. [13] Jaksa Rudolf, Sincak Peter, and Majernik Pavol (1999), ‘Backpropagation in Supervised and Reinforcement Learning for Mobile Robot Control’, Paper Presented at the International Conference CIMCA’99, on Computational Intelligence for Modelling, Control and Automation. February 17-19, 1999, Vienna, Australia. [14] Zamarreno, J. M. and Vega P. (1999), ‘Neural Predictive Control. Application to a Highly non-linear system’, Engineering Applications of Artificial Intelligence, 12, 149-158. [15] Yang, Simon X. and Meng, Max (2000), ‘An Efficient Neural Network approach to Dynamic Robot Motion Planning’, Neural Networks, 13, 143–148. [16] Gu, Dongbing and Hu, Huosheng (2002), ‘Neural Predictive Control for a Car-like Mobile Robot’, Robotics and Autonomous Systems, 39, 73–86. 16 D. R. Parhi and Alok Kumar Jha [17] Janglova, Danica (2004), ‘Neural Networks in Mobile Robot Motion’, International Journal of Advanced Robotic Systems, 1(1), 15-22. [18] Harb Moufid, Abielmona Rami, Naji Kamal, and Petriul Emil (2008), ‘Neural Networks for Environmental Recognition and Navigation of a Mobile Robot’, Paper Presented at the IEEE Conference on International Instrumentation and Measurement Technology. May 12-15, 2008. Victoria, Vancouver Island, Canada, pp. 1123-1128. [19] Velagic Jasmin, Osmic Nedim, and Lacevic Bakir (2008), ‘Neural Network Controller for Mobile Robot Motion Control’, World Academy of Science, Engineering and Technology, 47, 193-198. [20] Ouarda Hachour (2010), ‘A Neural Network Based Navigation for Intelligent Autonomous Mobile Robots’, International Journal of Mathematical Models and Methods in Applied Sciences, 4(3), 177-186. [21] Engedy Istvan, Horvath Gabor (2009), ‘Artificial Neural Network based Mobile Robot Navigation’, Paper Presented at the 6th IEEE International Symposium on Intelligent Signal Processing. August 26–28, 2009. Budapest, Hungary. [22] Markoski, B. Vukosavljev, S. Kukolj, D. Pletl, S. (2009), ‘Mobile Robot Control Using Self-Learning Neural Network’, Paper Presented at the 7th International Symposium on Intelligent Systems and Informatics. September 25-26, 2009. Subotica, Serbia, pp. 45-48. [23] Wahidin Wahab (2009), ‘Autonomous Mobile Robot Navigation Using a Dual Artificial Neural Network’, Paper Presented at the IEEE Conference TENCON, 2009, November 23-26, 2009. Singapore, pp. 1-9. [24] Barret, C. Benreguieg, M. and Maaref, H. ‘Fuzzy Agents for Reactive Navigation of a Mobile Robot’, Paper Presented at the First International Conference on Knowledge-Based Intelligent Electronic Systems, May 21-23 1997. Adelaide, Australia pp. 649-658. [25] Xu, W. L. (2000), ‘A Virtual Target Approach for Resolving the Limit Cycle Problem in Navigation of a Fuzzy Behaviourbased Mobile Robot’, Robotics and Autonomous Systems, 30, 315–324. [26] Aguirre Eugenio and Gonzalez Antonio (2000), ‘Fuzzy Behaviors for Mobile Robot Navigation: Design, Coordination and Fusion’, International Journal of Approximate Reasoning, 25, 255-289. [27] Mohannad Al-Khatib and Jean J. Saade (2003), ‘An Efficient Data-driven Fuzzy Approach to the Motion Planning Problem of a Mobile Robot’, Fuzzy Sets and Systems, 134, 65–82. [28] Hseng, Tzuu and Li, S. (2003), ‘Autonomous Fuzzy Parking Control of a Car-like Mobile Robot’, IEEE Transactions on Systems, Man, and Cybernetics—PART A: SYSTEMS AND HUMANS, 33(4), 451-465. [29] Cuestaa, F. Ollero, A. Arrue, B.C. and Braunstingl, R. (2003), ‘Intelligent Control of Nonholonomic Mobile Robots with Fuzzy Perception’, Fuzzy Sets and Systems, 134, 47–64. [30] Abdessemed, F. Benmahammed, K. and Monacelli E. (2004), ‘A Fuzzy-based Reactive Controller for a Non-holonomic Mobile Robot’, Robotics and Autonomous Systems, 47, 31–46. [31] Demirli, K. and Molhim, M. (2004), ‘Fuzzy Dynamic Localization for Mobile Robots’, Fuzzy Sets and Systems, 144, 251–283. [32] Parhi, D. R. (2005), ‘Navigation of Mobile Robots using a Fuzzy Logic Controller’, Journal of Intelligent and Robotic Systems, 42, 253–273. [33] Fatmi, A., Yahmadi, A. A., Khriji, L. and Masmoudi, N. (2006), ‘A Fuzzy Logic Based Navigation of a Mobile Robot’, World Academy of Science, Engineering and Technology, 22, 169-174. [34] Mendez, M. A. O. and Madrigal, J. A. F. (2007), ‘Fuzzy Logic user Adaptive Navigation Control System for Mobile Robots in Unknown Environments’, Paper Presented at the IEEE International Symposium on Intelligent Signal Processing. Oct. 3-5, 2007. Polytechnic University of Madrid, Madrid, pp. 1-6. [35] Hassanzadeh, I., Ghadiri, H. and Dalayimilan R. (2008), ‘Design and Implemention of A Simple Fuzzy Algorithm for Obstacle Avoidance Navigation of A Mobile Robot in Dynamic Environment’, In the Proceeding of the 5th International Symposium on Mechatronics and its Applications ISMA08. May 27-29, 2008. Amman, Jordan. [36] Song, K. T. and Sheen, L. H. (2000), ‘Heuristic Fuzzy-neuro Network and its Application to Reactive Navigation of a Mobile Robot’, Fuzzy Sets and Systems, 110, 331-340. Review and Analysis of Different Methodologies used in Mobile Robot Navigation 17 [37] Ma, X., Li, X. and Qiao, H. (2011), ‘Fuzzy Neural Network based Real-time Self-reaction of Mobile Robot in Unknown Environment’, Mechatronics, 11, 1039-1052. [38] Er, M. J., Tan, T. P. and Loh, S. Y. (2004), ‘Control of a Mobile Robot using Generalized Dynamic Fuzzy Neural Networks’, Microprocessors and Microsystems, 28, 491–498. [39] Kunpeng He, Hua Sun, Wanjuan Cheng, ‘Application of Fuzzy Neural Network based on T-S model for Mobile Robot to Avoid Obstacles’, In the Proceedings of the 7th World Congress on Intelligent Control and Automation. June 25 - 27, 2008. Chongqing, China. [40] Nurmaini, S., Hashim, S. and Jawawi, D. (2009), ‘Environmental Recognition using Ram-network based type-2 fuzzy neural for Navigation of Mobile Robot’, Paper Presented at International Conference on Computer and Automation Engineering. March 8-10, 2009. Bangkok, Thailand. [41] Velappa G. (2009), ‘Fuzzy and Neural Controllers for Acute Obstacle Avoidance in Mobile Robot Navigation’, Paper Presented at IEEE/ASME International Conference on Advanced Intelligent Mechatronics. July 14-17, 2009. Suntec Convention and Exhibition Center Singapore. [42] Marichal G. N., Acosta L., Moreno L., Mendez J. A., Rodrigo J. J., and Sigut M. (2001), ‘Obstacle Avoidance for a Mobile Robot: A Neuro-fuzzy Approach’, Fuzzy Sets and Systems, 124, 171–179. [43] Hui, N. B., Mahendar, V. and Pratihar D. K. (2006), ‘Time-optimal Collision-free Navigation of a Car-like Mobile Robot using Neuro-fuzzy Approaches’, Fuzzy Sets and Systems, 157, 2171–2204. [44] Khaldoun, K.T., and Munaf S. N. (2009), ‘A Neuro-Fuzzy Reasoning System for Mobile Robot Navigation’, Jordan Journal of Mechanical and Industrial Engineering, 3(1), 77–88. [45] Demirli K., and Khoshnejad M. (2009), ‘Autonomous Parallel Parking of a Car-like mobile Robot by a Neuro-fuzzy Sensor-based Controller’, Fuzzy Sets and Systems, 160, 2876–2891. [46] Kang, D., Hashimoto, H. and Harashima, F. (1995), ‘Path Generation for Mobile Robot Navigation using Genetic Algorithm’, In the Proceedings of the IEEE IECON 21st International Conference on Industrial Electronics, Control, and Instrumentation.,November 6-10, 1995. Orlando, FL , USA pp. pp. 167-172. [47] Woong-Gie Han, Seung-Min Baek, and Tae-Yong Kuc (1997), ‘Genetic Algorithm based Path Planning and Dynamic Obstacle Avoidance of Mobile Robots’, Paper Presented at IEEE International Conference on Systems, Man, and Cybernetics, 1997 Computational Cybernetics and Simulation. October 12-15, 1997. Hyatt Orlendo, Orlendo, Florida, USA., 3, 2747-2751. [48] Jianping Tu and Simon X. Yang (2003), ‘Genetic Algorithm based Path Planning for a Mobile Robot’, In the Proceedings of the 2003 IEEE international Conference on Robotics & Automation. September 14-19, 2003. Taipei, Taiwan. [49] Sedighi K.H., Ashenayi K, Manikas T. W., Wainwright R. L. and Tai H. M.(2004), ‘Autonomous Local Path Planning for a Mobile Robot using a Genetic Algorithm’, Congress on Evolutionary Computation, 2004, IEEE explore, 2, 1338 – 1345. [50] Dorigo, M., Maniezzo, V. and Colorni A. (1996), ‘The Ant System: Optimization by a Colony of Cooperating Agents’, IEEE Transactions on Systems, Man, and Cybernetics–Part B, 26(1), 1-13. [51] Cong Yee Zi, Ponnambalam S. G. (2009), ‘Mobile Robot Path Planning using Ant Colony Optimization’, 2009 IEEE/ ASME International Conference on Advanced Intelligent Mechatronics. July 14-17, 2009. Suntec Convention and Exhibition Center Singapore. [52] Chen Chia-Ho, Ting Ching-Jung (2006), ‘An Improved ant Colony System Algorithm for the Vehicle Routing Problem’, Journal of the Chinese Institute of Industrial Engineers, 23(2), 115-126. [53] Tan Guan-Zheng, He Huan, and Sloman Aaron (2007), ‘Ant Colony System Algorithm for Real-time Globally Optimal Path Planning of Mobile Robots’, Acta Automatica Sinica, 33(3), 279-285. [54] Raja P., S. Pugazhenthi, ‘Path Planning for Mobile Robots in Dynamic Environments using Particle Swarm Optimization’, 2009 International Conference on Advances in Recent Technologies in Communication and Computing. October 27- 28, 2007. Kottayam, Kerala, India, pp. 401-405. 18 D. R. Parhi and Alok Kumar Jha [55] Kwok N. M., Liu D. K., Dissanayake G. (2006), ‘Evolutionary Computing based Mobile Robot Localization’, Engineering Applications of Artificial Intelligence, 19, 857–868. [56] K. M. Passino (2002), ‘Biomimicry of Bacterial Foraging’, IEEE Control Systems Magazine, June, 2002, 52–67. [57] Abraham Ajith, Biswas Arijit, Dasgupta Sambarta, and Das Swagatam (2008), ‘Analysis of Reproduction Operator in Bacterial Foraging Optimization Algorithm’, In the Proceedings of the IEEE Conference on Evolutionary Computation, CEC 2008. June 1-6, 2008. Hong Kong, China.pp. 1476-1483. [58] Das Swagatam, Biswas Arijit, Dasgupta Sambarta, Abraham Ajith (2009), ‘Bacterial Foraging Optimization Algorithm: Theoretical Foundations, Analysis, and Applications’, Studies in Computational Intelligence, 203, 23-55. [59] Pham D. T., Ghanbarzadeh A., Koc E., Otri S., Rahim S., Zaidi M. (2005), ‘The Bees Algorithm, Technical Note’, Manufacturing Engineering Centre, Cardiff University, UK. [60] Pham D. T., Ghanbarzadeh A., Koç E., Otri S., Rahim S., Zaidi M. (2006), ‘The Bees Algorithm – a Novel Tool for Complex Optimisation Problems’. In the Proceedings of 2nd International Virtual Conference on Innovative Production Machines and Systems, July 3-14, 2006, 454–461. [61] D. Karaboga, B. Basturk (2008), “On the Performance of Artificial Bee Colony (ABC) Algorithm,” Applied Soft Computing 8, 687-697.