Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
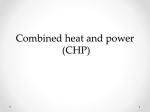
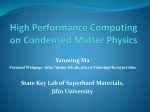
BODY TEMPERATURE REGULATION FOR QUADRIPLEGIC WEARER Team #1 Albert Alexander – Project Manager Steven Shane –Web Master Melissa Stroud –Document/Presentation Prep Stephen Zajac –Lab Monitor/Parts Acquisition Faculty Coordinator: Dr. R. J. McGough Sponsored by: Michigan State University Resource Center for Persons with Disabilities Chrysler Foundation Wochholz Endowment Executive Summary Spinal injuries can cause a disorder in which the body cannot properly regulate its own temperature. Hot or cold weather causes large swings in core temperature, severely impairing basic body functions. This disorder typically accompanies paralysis of the legs or arms, leaving a person wheelchair-bound. In an effort to provide greater independence and increased safety for people with this disability, we have designed a wheelchair accessory which regulates body temperature. A network of tubes circulates temperaturecontrolled liquid through an all-weather garment, keeping the wearer’s core temperature within a comfortable range. The garment is sewn into a starter jacket, maintaining the appearance and comfort of an all-weather windbreaker, and sensor feedback provides active diagnostics as well as a platform for future automation development. Most importantly, every component of the system is built to last, and mechanical elements are easily serviceable to ensure years of use. These features keep the wearer safe and allow them a greater degree of mobility and freedom in a variety of environments. Introduction/Background Thousands of Americans live with the effects of spinal injuries. A subset of this group contains people whose spinal injury has resulted in severely reduced circulation and sensation in their limbs. Decreased sensation causes the body to become less able to manage its own core temperature, which in turn increases the sensitivity of the body to changes in the environment, a condition known as quadriplegic poikilothermia. For such people, hypothermia and heat stroke are constant concerns when they are outside People with poikilothermia often struggle to coexist with the outside weather, particularly in places like Michigan, where extreme temperatures—hot and cold—are not uncommon. While there are products available to help moderate body temperature, few fit the unique needs of a poikilotherm. Resistive heating fabrics are imprecise and can be dangerous, while medical silicone pads are maintenance-intensive and restrict mobility. This unfilled need inspired the construction of a wheelchair accessory that is capable of heating or cooling the wearer without compromising independence or mobility. Much like electric blankets, conventional temperature-regulated clothing available on the market uses resistive heating, in which a DC power source (usually a battery) runs current through resistive wire distributed about the garment. However, resistive heating in wires, unless carefully regulated, can result in thermal runaway, causing discomfort, burns, or even fires. In addition, metals used in such resistive heating generally have high specific heat, which results in uneven distribution of heat on the body. Such limitations are particularly dangerous for poikilotherms, who may be unable to detect thermal runaway until significant damage has already been done. It is not uncommon for such devices to bear warning labels which say specifically, “not for use by quadriplegics.” More sophisticated garments exist in which silicone pads in the garment are heated resistively, but these are generally designed for bedside hospital care and include large, stand-alone circulation systems that are very expensive and require periodic adjustment by trained professionals. Our design is unique in that it provides a simple and mobile means of controlling temperature in both hot and cold environments. The device uses solid-state thermoelectric technology to eliminate the need for a bulky compressor, providing a complete temperature-control solution in a compact package that hangs on the back of the wheelchair. With the completion of the project, wheelchair-bound people with poikilothermia will be free to enjoy the outdoors regardless of the restrictions of their disability. Approach Our solution to the problem is to use a Peltier Effect thermoelectric as the mode of heating or cooling water, which will circulate throughout tubes incorporated into a jacket that can be worn by the user. Several advantages follow from using this approach: First and foremost, the Peltier Effect Thermoelectric (PETE) allows the water to be heated or cooled using a single solid-state device instead of the large, noisy compressor system typical in most other refrigeration applications. By comparison, the PETE is silent, compact, and contains no moving parts, presenting limited opportunity for failure. The water circulation system bypasses the problems associated with resistive wiring. Most notably, water experiences no thermal runaway, and its higher specific heat ensures that the exchange of heat will take place across the whole length of the tubes instead of within the first few feet only. Technical Work The development of the final product is best considered when divided up into discrete systems. Thermal System The thermal system is composed of three separate parts: Thermoelectric, and heat exchange. The thermoelectric device used in this project is a Peltier Effect Thermoelectric Junction (PETE) as mentioned above. PETE are usually used in cooling applications where a compressor would be too large, noisy, or otherwise impractical. The unique aspect of the PETE is that it can be made to pump heat to or away from a surface depending only on the polarity of the voltage. Thus, heating and cooling are both made possible with a single device without any need for moving parts beyond a simple dualthrow relay to manage the polarity of the voltage. Furthermore, the PETE is compact, solid-state, and silent. Since the PETE is a heat pump, a significant heat sink had to be installed on the thermoelectric to prevent a high temperature differential buildup between the two sides, as a high differential saps the efficiency of heat transport. The PETE also dissipates a significant amount of heat in the course of regular operation, a byproduct of its relatively low efficiency. The sinking scheme for the thermoelectric uses two 12V electric fans to pass air through a commercial nickel-plated copper heat sink. The heat sink is bonded directly to one side of the thermoelectric. Even at full operation in cooling mode, the heat sink does not noticeably increase in temperature over time, ensuring a low differential, and thus greater efficiency. Heat is transferred through a commercial water block between the thermoelectric and the water circulated through the tubing. A combination of thermal grease and the heavy-duty ceramic coating on the PETE guards against stray charge or current finding its way into the water while maximizing heat exchange. Power System In any electrical engineering project, power is a vital concern. Managing the flow of power through the circuitry linked to the actuators is what drives the functionality of the product as a whole. The system is designed to run on 24V, the standard voltage for electric wheelchair batteries. Three pin XLR connections run the power from the battery to the case, with female connections on the powered side to avoid shorting a hot pin. Within the case, switched power supplies and PWM control deliver voltage and wattage appropriate for each of the four main electrical components in the system: the cooling fans, the thermoelectric device (PETE), the pump, and the microchip control system. The PETE consumes up to 136W in regular operation. While the PETE is compatible with a wide range of voltages, this particular junction pumps heat most efficiently at 17V. At 17V, the PETE will draw up to 8A of continuous current for many minutes at a time. Drawing this much current brings up special concerns for mounting and isolation. The power from the battery is run directly to the switched power supply for the PETE using 12ga wire. The switched power supply is wired point-to-point and is grounded directly to the star ground for the case. When considering the efficiency of a DC-DC switcher there are four main sources of loss in the system: on resistance of the transistor, voltage drop across the diode, winding resistance of the inductor, and equivalent series resistance (ESR) of the capacitor. On resistance of the transistor was minimized by using an Insulated Gate Bi-Polar transistor (IGBT) which has an on resistance of 2 milliohms. Assuming the maxium amount of current flowing through the transistor is 10A, resistive heating due to I2R losses will be at most 2 tenths of a watt. This is small enough to eliminate the need to heatsink the device. It causes isolation issues though that will be discussed ion the controls section. Diode voltage drop was reduced by using a Schottky rectifier diode with a much smaller voltage drop than traditional silicon diodes. The inductor value used was minimized to the amount required for the circuit to operate properly since high inductance ratings translate directly to more winding resistance. The capacitor value was also kept as low as possible, since large electrolytic capacitors usually have very high ESR values. A 15A fuse protects the entire system in case of a short, but after the 15A fuse there is a separate 24V power run with a 6A fuse. This 6A fused circuit provides power for the rest of the system, which runs at a much lower wattage than the thermoelectric. Within this low amperage system block, A dedicated 5V switched-mode power supply provides Vcc for the microcontroller at very high efficiency, keeping the idle current for the system low to prolong battery life. The microcontroller is always on in order to run active diagnostics, but the power consumption is only 100mA, basically insignificant compared to the power drawn by the wheel motors. Mechanical Elements The case is constructed from 16ga aluminum, chosen for its light weight and corrosion resistance. All edges and corners are folded over to increase rigidity. The vertical air intake is located as far as possible from the circuitry to protect the electronics from moisture. However, the air drawn downward by the two fans causes a negative pressure differential, pulling air from holes in the far end of the case across the circuitry, carrying heat away from the MOSFET switches. The circuit boards are mounted on plexiglass above the pump and tube assembly, preventing shorts in case of a leak or a spurting connection, and all external electrical connections are oriented straight downward against the side of the case to prevent water damage and to keep the wires from snagging or tangling. All internal board-to-board connections are run with amp connectors and are color-coded by control element to facilitate easy troubleshooting and connection/disconnection. High-amperage connections are run with heavy-gauge wire and are either directly twisted and soldered or attached with heavy duty insulated spades to prevent resistive heating at contacts, PCB damage, and accidental shorts. MOSFET switches provide logic-level PWM control for two fans, a reciprocating pump, and a DPDT relay which swaps the voltage polarity across the PETE, switching between heating and cooling. All of these devices are run off of the 6A fused 24V power rail. Special factors were taken into consideration for each of the devices. For example, the fans are designed for 12V and are wired in series; if one of the fans becomes obstructed due to an air restriction, its impedance will increase, causing it to draw more power than the other fan and equalizing airflow. A reciprocating pump was chosen due to its high capacity for back pressure and its compatibility with air bubbles. The pump, which was originally designed for 12V control, has been modified to overcome the extreme flow restriction caused by 30 feet of 1/8” tubing. Its internal spring was replaced by a much stronger one, and the voltage was increased to 24V, causing a larger amount of circulation for each thrust of the diaphragm. In its final form, the pump is capable of moving up to 15 gallons per minute, providing a very comfortable margin for the 5 gallons per minute minimum flow needed to maintain a 10° differential between the jacket intake and outtake. The relay is rated at 15A, making it more than capable of supporting 9A of continuous draw at the absolute maximum drawn by the thermoelectric. Since the coil draws a full 1.2W when engaged, the relay defaults to setting the PETE to cooling mode. The PETE is much more efficient at heating than cooling since the resistivity of the PETE creates heat in addition to the Peltier effect, so defaulting to cooling narrows the efficiency gap between the two modes. In addition, defaulting to cooling mode is safer than heating mode in the case of extreme malfunction. If somehow an electrical short causes the thermoelectric to engage and the PSoC diagnostic system fails to turn it off, cooling the user is merely inconvenient, while heating can cause heatstroke. Circuit and Control Integration The pump, fans, relay coil, and PETE are all controlled by logic-level output from the PSoC. The pump, fans, and relay coil are all high-side drive, while the PETE is lowside drive to take advantage of the low on resistance of the n-channel driving circuit for the switched mode power supply. All devices default to off when the PSoC is turned off. This is achieved by using internal pull-up logic on the pump, fans, and relay coil, and internal pull-down with an external pull-up resistor on the PETE. The pump, fans, and relay coil are all driven by n-channel MOSFETs, providing complete isolation between the output power and the PSoC logic. This isolation protects the PSoC from stray currents on the inductive power output stages of each subcircuit. In order to electrically isolate the PSoC digital control line from the thermoelectric DC-DC switcher, and opto-isolater is used. This device contains an LED and a phototransistor in a single package, with a light bridge in between the two elements. The control signal from the PSoC functions to turn the led on and off, which will in turn cause the phototransistor to switch on and off. It is this phototransistor that controls the n-channel mosfet switcher. The benefit here is that there is complete electrical isolation between the PSoC and the DC-DC switcher. Sensors Thermistors are thermally-sensitive resistors with the ability to conduct electricity controlled by temperature. Thermistors are divided into two different categories based upon whether their resistance increases or decreases with a rise in temperature. Negative Thermal Coefficient (NTC) thermistors are used as temperature measuring devices and decrease proportionally with increases in temperature. Thermistors are used in this project to monitor the temperature of three separate areas, and the information is linked to the control system to provide valuable diagnostic information. Temperature sensors monitor the output of the heat exchanger, the temperature of critical heat sinks within the case, and the air inside the jacket worn by the customer. Omega 44006 precision thermistors (10kΩ @25C) were 5V DC used in this project, because thermistors can be used with long 44006 Thermistor extension leads with a small loss of accuracy with ±.2deg C or To Control System ±.1deg C interchangeability tolerance. Furthermore, thermistors 10kOhm (.1% tol) are usually more accurate than thermocouples and although have a limited temperature range because of their non-linearity, since the temperature range in our application is low by comparison, thermistors are particularly suited to the application. Thermistors also have a fast response time and are better suited for precision temperature measurements. Thermistors tend to be smaller and more rugged than RTD’s or thermocouples. The resistance of the thermistor is monitored by the control system through simple voltage division, as shown on the right. Garment and Circulation System The team developed a scheme for body heat distribution based on communication with medical professionals in the field; first priority was given to areas of the body in which heat exchange is most effective. Based upon a thermal map of the human body, especial emphasis was placed on tubing at the shoulders, neck, and back of the garment. Using an artist’s mannequin as a guide, the team carefully designed a tube path that would maximize heat exchange while avoiding pinch and strain points on the user’s body. The original garment selected was a white synthetic longsleeved pullover athletic shirt. However, the garment fell short in several ways. In tests, the pullover experienced severed strain and stretching as it was donned, precluding the notion of a stable, strainfree network of tubing. A looser fit was deemed necessary, and to address insulation issues, an interior lining was added. The new design had the added benefits of increasing robustness and make the tubes easier to attach without being visually obtrusive. We settled on a zippered Spartan microfleece with a loose fit. The insulation compensates for the loose fit: the tubes are no longer close to the skin on the entire tube length, so the system must regulate the temperature of the air next to the skin instead. However, the most effective points of heat transfer remain close to the skin, particularly those on the shoulders and the back of the neck. The microfleece is thin enough to be worn under a heavy coat in the winter, but light enough to be worn in the summer as well. A tailor’s pattern below shows the initial visualization of the tube path through the garment. Control System The control system is what ties many of the key systems together. Its purpose is to receive information about the current operation of the system from the sensors and in response control the operation of the circulatory and thermoelectric systems. At the heart of the control scheme is the microcontroller, a Cypress Programmable System on Chip (PSoC). The PSoC is a customizable composite of analog and digital processing capability with a customizable pin arrangement. The PSoC is programmed through a comprehensive IDE and development board described in the Software and Tools section of this report. In designing the logical structure of the control system, the first aspect to consider is the enumeration of inputs and outputs. According to the initial design assembled by the team, the control system was meant to regulate the flow of power to the PETE by adjusting a PWM output at the gate of a power MOS-FET. The PWM output should be calculated from the sensory readings, raising or lowering the specific value of the PWM duty cycle to raise or lower the effective voltage controlling the power MOS-FET. By controlling the power to the thermoelectric, the temperature of the water is regulated. The temperature sensor on the output of the heat exchange provides a feedback to the system to adjust the level of power supplied. As the design of the product developed, so did the control scheme for managing it. After consultation with the customer, a manual override of the system was added, shifting the focus from a purely automated system to one in which the user specified a setpoint to the system which would be adjusted by the control system in response to sensor input from inside the garment itself. In the final design, a five-position rotary switch is used to allow the user to select one of five settings: Off, high cooling, low cooling, low heat, and high heat. The switch position constitutes a digital input to the PSoC, setting the system into particular modes of operation. The control flowchart is shown in Appendix A. The outputs of the PSoC must be monitored such that vital measurements (body temperature, water temperature) all lie within hard limits. The hard limits are defined in the table below. Value Limits Water Temp. (°F) 50-120 Body Temp (°F) 70-99 Within this framework, the voltage to the PETE is varied to produce water temperatures corresponding to particular setpoints, which in turn can be adjusted from feedback from the body temperature thermistor. The initial setpoints for the PETE PWM duty cycle are summarized in the table below. Switch Position Duty Cycle % High Cold Low Cold Off Low Heat High Heat 100 90 0 75 90 The disparity between the cold and heat initial setpoints is related to the efficiency of the PETE. Since the PETE heats far more efficiently than it cools, the cooling setpoints are uniformly larger. Testing Tests were performed to track the performance of the PETE in both heating and cooling modes over time. A graph of temperature change with respect to time for the cooling mode is shown in the figure below. For the first trial, 1 liter of 120 °F water was cooled in an 80 °F air temperature environment, meaning that there is actually a negative temperature difference. The negative differential causes the system to operate at peak efficiency until a water temperature of 80 °F is reached. At this point, a temperature difference started to build up, reducing the cooling potential of the system. The temperature difference and heat flow balance out at around 50 °F. At this point the amount of heat entering the system through the air is equal to the amount that is being removed by the thermoelectric system. If a larger temperature difference was required, than one could simply reduce the amount of water in the system, meaning less heat would be absorbed by the atmosphere, translating into less heat that needs to be removed to lower the water temperature. The general trend can be seen from the figure by the rapid temperature change in the first ten minutes, after which the temperature change converges to a limit in which the heat pump cannot overcome the differential. Cooling performance of a thermoelectric system. Time (x-axis) vs. Temperature change (y-axis). The heating performance of the system was tested in a second trial, as shown in the figure below. This again shows temperature change with respect to time, except that the initial temperature of the water was 50 °F. Initial heating performance is double that of the cooling performance, since heating due to both the resistance of the device and the thermoelectric effect is present. An interesting note is that in this mode, the heatsink is actually pulling heat from the environment. The air outtake was measured to be 2 °F colder than the air intake. The point at which the transition from both resistive and thermoelectric heating to just resistive heating can clearly be seen in the figure below. Heating performance of a thermoelectric system. Summary The goal of this project was to design and construct a temperature control system as a wheelchair accessory to increase the comfort and independence of wheelchair-bound poikilotherms. This goal has been accomplished. Our system is capable of cooling 1 liter of water by 40°F in ten minutes or heating it by 40°F in half the time. It is stylish and discreet, and it in no way impairs the mobility of the user. This prototype is built to last and has been designed with considerable margin to ensure a long lifecycle. With that in mind, we have intentionally designed this system for future development, creating a simple and flexible platform for adding temperature readouts, refining diagnostics, and customizing system variables to minimize noise and power consumption. The project has been completed for a final prototype cost beneath the $500 allocated for the project as tabulated below. Final Budget Part Thermoelectric Module Heatsink Water Block 120mm Fans (2) Water Pump Thermal Greese 1/8 inch Tygon Tubing (30 ft) Thermistors (3) Relay Quick Disconnects (2) IGBT Transistors (4) Inductor Starter Jacket + Vest Material Microcontroller Model Number HP-199-1.40.8PR TRUE 120 Black XWB-1 DFS1238123000 WAL FRD-2-1 AS5-35G R-3603 TH-10-44006 782-2C-24D 5012K38/44 STP300NH02L PCV-2-104-10L CY8C29466 Total Cost $45.20 $65.95 $34.99 $16.58 $67.65 $5.99 $11.70 $45 $5.50 $25.46 $25.20 $5.28 $75 $8 $437.50 Appendix 1: Individual Technical Contributions Albert Alexander Albert designed and built the control circuitry and was responsible for system integration. The job of system integration led him to be closely involved with every system in the entire product, and his contributions ranged throughout them. He was in charge of electrical safety, designing a grounding scheme, breaker placement, and circuit drivers to ensure safe operation even in the case of malfunction. He built all electrical interconnects and designed board routing for maximum reliability, and worked with Steven Shane to design active diagnostics and choose automatic shutoff conditions. Another primary focus was on power circuitry, and in conjunction with Stephen Zajac he designed, tested and built the low-amperage control circuit. Albert gathered the requirements for each individual power setting, choosing MOS-FETS, managing sinking. He also chose a relay as the best method of creating a doublethrow switch. He designed, tested and built the 24V/5V DC switcher and designed and built the case. Steven Shane Steven Shane was in charge of selecting the microcrontroller technology to build the control system. At first he selected the Microchip line of PIC48f5255 microcontrollers to manage the analog inputs and generate PWM output. However, as the project developed he had to choose a new architecture due to increased demands upon the control system, and selected the a Cypress PSoC for greater controlling power.Additionally, he worked closely with Albert and Melissa to determine the number and nature of inputs and outputs to the control system. The control aspect of the project was contributed by Steven, as he designed, programmed, implemented simulated and tested the control system, running through a series of logical architectures. The design changed throughout the lifetime of the project based upon shifting requirements placed on the system by other portions of the project. According to these needs and the limitations of the sensory inputs, Steven designed the control system for use on the PSoC to be a set-point based feedback system with variable setpoints based upon temperature sensor data. He designed and implemented a series of diagnostics and procedural safeguards which preclude the system operating in an unsafe mode. The algorithm is designed such that if unreasonable or unsafe temperatures are detected at the water flow the entire system shuts down rather than continue circulating water of unknown provenance. The final flowchart for the design system can be seen in Appendix 3 of this report. Melissa Stroud Melissa Stroud focused her efforts on concerns related to the temperature sensors as well as the mechanics of the garment and the tubes inside. After gathering information on the requirements for the sensors (temperature range, sensitivity, hardiness, power requirements) she selected a specific class of thermistors and built the circuit linking them to the control system. She performed additional coarse testing to verify the operation of the thermistors at different temperature extremes. Melissa also spearheaded the garment section of the project. She built the first prototype shirt and experimented with the optimal way to attach the water-carrying tubes to the garment securely and without strain. Melissa devoted significant effort towards choosing the specific path on the garment that the tubes would follow to maximize effective heat transfer. The path was also designed to avoid portions of the body that would pinch the tubes or put stress on them. Similarly, the tube path was chosen such that the tubing formed zero closed loops, eliminating the possibility of constriction. She oversaw the final placement of tubes in the interior vest lining of the jacket, as well as securing the tubes inside the garment via cloth sleeves. Stephen Zajac Stephen Zajac’s main responsibility was creating the heat exchanger system to be used in the final product. This involved selecting the thermoelectric device to be used, and choosing a compatible a heatsink, water block, fans, and water pumping system. In order for the thermoelectric device to work as it is advertised to, the supporting components must have the correct specifications. Another responsibility was to make a working design for the DC-DC converter used to power the thermoelectric module. This device requires a specific voltage and current to operate at peak efficiency, making control and accuracy of the converter a significant issue. The TE module also can draw up to 9 amps when in operation, making high current design issue important. Appendix 2: Technical Resources Omega Engineering Inc. Cypress Semiconductor Microchip Microcontrollers Cypress Design forums Analog - DAC With Analog Modulator AN2199 Heat Sink/ Water Block Information Dr. G. Wierzba: ECE301/302 Notes www.omega.com www.cypress.com www.microchip.com http://www.cypress.com/forums http://www.cypress.com/?rID=2783 http://www.crazypc.com/products/trueblack-50984.html www.egr.msu.edu/~Wierzba Appendix 3: Control Flowchart IN START TYPICAL FALSE FALSE SWITCHVAL != 4 || SINKTEMP > MAXSINKTEMP TRUE FANPWM=0; PMPPWM=0; TEMPWM=0; VHEAT=0; GOTO START FANPWM = 100; PMPPWM = 100; WAIT 2 SECONDS; VHEAT = 1; SWITCHVAL < 4 VHEAT = 0; WATERTEMP < H2OSETPOINT+H2OTOL WATERTEMP > H2OSETPOINT-H2OTOL (WATERTEMP > H2OSETPOINT-H2OTOL) WATERTEMP < H2OSETPOINT+H2OTOL TEMPWM = 0; TEMPWM >= 5 TEMPWM <= 95 TEMPWM -= 5; TEMPWM += 5; WAIT 2 SECONDS TEMPWM = 100; BODYTEMP > LOWER_REASONABLE && BODYTEMP < UPPER_REASONABLE BODYTEMP BODY_SETPOINT SWITCHVAL < 4 BODYTEMP < BODYSETPOINT+BODYTOL BODYTEMP > BODYSETPOINT-BODYTOL BODYTEMP > BODYSETPOINT-BODYTOL BODYTEMP < BODYSETPOINT+BODYTOL H2OSETPOINT = MINH2O; H2OSETPOINT >= MINH2O+5 H2OSETPOINT <= MAXH2O-5 H2OSETPOINT -= 5; H2OSETPOINT += 5; WAIT GOTO START H2OSETPOINT = MAXH2O; 5-pin Rotary Switch 5V DC, Low Current Analog Thermistor Input PSoC PWM Variable Duty Cycle Digital 5V PWM Variable Duty Cycle 24/5V buck converter Dual-Pin Dual-Throw Relay Power MOS-FET Thermoelectric 24 V battery Power MOS-FET Electric Fan Pump Figure 1: Data Flow Thermoelectric Module Product Price Imax (amps) HP$43.90 11.3 1991.4-0.8 Qmax (watts) 172 Vmax (volts) DTmax A (Th=300K) (mm) 67 40 B (mm) 40 H (mm) 3.2 24.6 Source: http://www.tetech.com/Peltier-Thermoelectric-Cooler-Modules/High-Performance.html Water Pump Part# 159729 Fans Brand Scythe Mfr# FRD-2-1 Model Shut-Off Pres. 2.5 Psi Fan Size DFS123812- 120mm 3000 Current (amps) 1.5 RPM Air Flow 3000 ±10% RPM 133.60 CFM Noise Level 45.90 dBA Voltage 12v Dimensions 120 x 120 x 38mm Heatsink Brand Thermalright Model True 120 Dimensions L63.44 x W132 x H160.5 mm Water Block Part# Dimensions Weight XWB-1 L64 x W48 x H17mm 250g Weight 790g Heat Pipes Six heat pipes with black nickel plated Material Copper Source: http://www.clunk.org.uk/martins-liquid-lab-articles/thermalright-xwb-01-water-block-flow-rate-testing.html