Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
CALIBRATION OF A JUMP-DIFFUSION PROCESS USING
OPTIMAL CONTROL
JONAS KIESSLING
Abstract. We present a method for calibrating a jump-diffusion model to observed
option prices. We formulate the problem as an optimal control problem with the
model parameters as control variable. It is well known that such inverse problems
are ill-posed and need to be regularized. By studying the characteristics of the corresponding Hamilton-Jacobi-Bellman equation we obtain an Hamiltonian system with
a non-differentiable Hamiltonian. We suggest an explicit regularization of the Hamiltonian and solve the regularized Hamiltonian system with a symplectic Euler method.
By a change of variables the option prices solve a forward problem in the strike and
maturity. This is used for higher computational efficiency. We conclude the paper
with some numerical examples using both real and artificial data.
1. Introduction
Consider a stock S = St priced in a market with risk-free interest rate r. Let C =
C(t, S; T, K) denote an ordinary European call option on S with strike price K and
maturity T . Under centain assumptions (see any book on financial mathematics, for
instance [5] chapter 9) on the market one can assume that there is a probability measure
Q on the set of all stock price trajectories such that the price of a call option can be
calculated as the discounted expected future pay-off:
(1)
C(t, St ; T, K) = e−r(T −t) E Q [max(ST − K)|St ]
A priori not much is given about this pricing measure Q except that e−rt St is a martingale under Q:
e−rt St = e−rT E[ST |St ]
(2)
Model calibration is the process of calibrating (that is, determine) Q from market
data. The purpose of this paper is to explain how the calibration problem can be solved
by optimal control and the theory of Hamilton-Jacobi-Bellman equations. The idea is
as follows: by equation 1 there is a price function of call options corresponding to each
choice of measure Q, C = C(T, K; Q). Regarding Q as the control we try to minimize
Z T̂ Z
(C(T, K; Q) − Cm (T, K))2 dT dK
0
R+
where Cm denotes the market price of call options.
As stated the problem of calibrating Q is too hard. There are simply too many possible
choices of pricing measures that would fit data accurately. The usual approach is to
Date: January 14, 2010.
1
2
JONAS KIESSLING
prescribe the dynamics of St under Q, its risk-neutral evolution. Concretely one assumes
that the price process St belongs to some family of stochastic differential equations. The
calibration consists of within that family picking the one with the best fit to market
data. One could for instance assume that there is a number σ such that
dSt
= rdt + σdBt .
St
Here and for the rest of the paper we let Bt denote Brownian motion. This was the
approach taken by Black and Scholes ([3]) and many others. The calibration problem
is now reduced to determining one number σ. This simple model is still by far the
most widely used, especially in the day-to-day pricing and hedging of vanilla options.
The problem with this approach is its poor ability to reproduce market prices. So poor
in fact, that different numbers σ is needed to price options with different strikes and
volatilities on the same underlying, a clear violation of the original model.
There are many ways people have refined the model suggested by Black and Scholes.
One popular approach, for instance the Heston model ([8]) or the Bates model ([2]), is
to assume stochastic volatility, i.e. σ is no longer a number, but a stochastic process.
Following Dupire ([7]), a second approach is to assume σ not constant but a deterministic function of time and price σ = σ(t, St ), the so-called ”local volatility” function.
One nice feature of this model is that there is a closed formula for σ(t, S), see [7] p. 5.
Finally a popular approach is to introduce discontinuities (i.e. jumps) in the price
process. This was initiated with the work of Merton in 1976 ([10]). A good reference for
jump processes in finance is the book [5].
The model we choose to calibrate in this paper is a jump-diffusion model with state
and time dependent volatility and time dependent jump intensity. It should be noted
however that the techniques used in this paper are more widely applicable.
Even after making restrictions on the pricing measure, model calibration faces one
major problem. It is typically ill-posed in the sense that the result is highly sensitive
to changes in the data. In fact, one reason that the standard Black and Scholes pricing
model is still so widely used is probably that a constant volatility is so easy to determine.
One benefit of the optimal control approach is that the ill-posedness is made explicit in
terms of the non-smoothness of the Hamiltonian (see equation 20). Well-posededness is
obtained after a regularization.
The focus of this paper is to develop a technique for calibrating the pricing measure
from quoted option prices. As can be seen in the final section of the paper, the method
works in the sense that we are able to determine a measure Q such that pricing under
Q results in prices in accordance with observed market prices. Of course, to apply the
method in a real life situation would require more work. One challenge is to obtain a
pricing measure that is exact enough to price exotic options. Ongoing work ([9]) indicates
that the sensitivity of certain exotic contracts to even small changes in the pricing
measure makes the procedure of calibrating on vanilla to price exotics rather dangerous.
See also [13] for an interesting illustration of this problem. An other important challenge
is to obtain a pricing measure that not only gives reasonable prices, but also good values
for the greeks. One can argue that it is more important to obtain good values for the
greeks then for the price as the greeks determine the hedging strategy whereas the market
determines the price.
CALIBRATION OF A JUMP-DIFFUSION PROCESS USING OPTIMAL CONTROL
3
The outline for the rest of this paper is as follows: In the next section we introduce
in more detail the SDE we wish to calibrate. Following Dupire, we also deduce a forward integro-partial differential equation satisfied by the call option in the strike and
maturity variables T and K. This makes the implementation of the numerical solution
scheme much more efficient. In section 3 we give a quick introduction to the theory of
optimal control used later in the paper. In the following section we develop a scheme
for calibrating the local volatility and jump intensity. This is done by first phrasing the
problem as an optimal control problem and then solving the corresponding regularized
Hamiltonian system. We conclude the paper with some numerical experiments. We first
try the method on artificial data obtained by solving the forward problem 1 with prescribed local volatility and jump intensity, thus obtaining a price function C = C(T, K).
The local volatility and jump intensity are then reconstructed from C(T, K) using the
scheme described in the earlier sections. Finally we calibrate using data from the S&
P 500-market. To start the procedure we need information on the jump distribution.
In [1] this problem is solved by calibrating a Lévy-proces then refining the calibration
by allowing the volatility (and in our case, the jump intensity) to vary. We use their
calibration of the jump distribution. The calibration scheme results in a ”reasonable”
volatility surface that is roughly constant in time, but varying in price with lower price
implying higher volatility. The result is positive in the sense that we had no problem of
convergence once the jump distribution and initial guesses had been specified.
2. The Forward Equation
We begin this section by introducing a model for the risk-neutral stock price dynamics.
Consider a stock S paying no dividend which is, under the pricing measure, affected by
two sources of randomness: ordinary Brownian motion B(t) and a compound Poisson
process with deterministic time dependent jump intensity. These assumptions leads to
the following evolution of S:
(3)
dS(t)/S(t−) = r − µ(t)m(t) dt + σ(t, S(t−))dB(t) + J(t) − 1 dπ(t)
where the relative jump-sizes {J(t)}t>0 consists of a family of independent stochastic
variables with at most time-dependent densities {χ(t)}t>0 . The jump times are governed
by a Poisson counting process π(t) with time dependent intensity µ(t). As usual σ
denotes the (state and time dependent) volatility function and r denotes the risk-free
interest rate. The drift term is determined by the fact that e−rt S(t) is a martingale,
forcing m(t) to be m(t) = E[J(t) − 1]. In 3, t−is the usual notation for the limit t − ||,
→ 0.
The price C = C t, S(t) of any European style contingent claim written on S with
pay-off function g(S) is given by the discounted future expected pay-off
C t, S(t) = e−r(t−T ) E Q [g S(T ) |S(t)].
4
JONAS KIESSLING
Standard arguments (see for instance [5] chapter 12) show that C satisfies the backward integro partial-differential equation
1
(4)
rC = Ct − µ C + mSCS + E[C t, J(t)S ] + σ 2 (t, S)S 2 CSS
2
+ rSCS
C(T, S) = g(S).
where
Z
C(t, Sx)χ(x; t)dx
E[C(t, J(t)S)] =
R+
We use the notation Ct , CS etc. to indicate the derivative of C = C(t, S) with respect
to its first and second variable respectively.
As it stands, in order to calculate call option prices for different strikes and maturities T andK, we need to solve the above equation once for each different pair (K, T ).
However, following Dupire ([7]) one can show that due to the specific structure of the
payoff function of a call option, C satisfies a similar forward equation in the variables T
and K:
Proposition 2.1. Assuming stock price dynamics given by 3. A European call C(T, K) =
C(0, S; K, T ), at fixed t and S, satisfies the equation:
1 2 2
(5)
CT = µ mKCK − (m + 1)C + E J(T )C T, J(T )−1 K
+ σ K CKK
2
− rKCK
Z
−1
E J(T )C T, J(T ) K =
zC(T, K/z)χ(z; T )dz
R+
C(0, K) = max(S − K, 0)
Proof. Let f = f (t, x) denote some function defined on R+ × R+ . We begin by introducing the adjoint operators L∗ and L:
Z
(6)
L∗ f (t, x) = ft (t, x) − µ f (t, x) + mxfx (t, x) +
f (t, zx)χ(z)dz
R+
(7)
1
+ σ 2 x2 fxx (t, x) + r xfx (t, x) − f (t, x)
2
Z
Lf (t, x) = −ft (t, x) + µ f (t, x) − m∂x (xf ) +
z −1 f (t, z −1 x)χ(z)dz
R+
1
+ σ 2 x2 fxx (t, x) − r ∂x xf (t, x) + f .
2
From 4 we see that in its first two variables C(t, S) = C(t, S; T, K) satisfies
L∗ C(t, x) = 0.
We let P = P (t, x; s, y) denote the solution to
(8)
L(t,x) P (t, x; s, y) = 0 t > s
P (s, x; s, y) = δ(x − y).
CALIBRATION OF A JUMP-DIFFUSION PROCESS USING OPTIMAL CONTROL
5
Where the subscript in L(t,x) indicates that the operator is acting in the variables t and
x.
Integration by parts yields:
Z TZ 0=
L∗ C(t, x) P (t, x; s, y)dxdt
s
=
R
hZ
C(t, x)P (t, x; s, y)dx
it=T
t=s
R
Z
Z
C(t, x)(L(t,x) P (t, x; s, y)dxdt
+
s
R
Z
Z
C(T, x)P (T, x; s, y)dx −
=
T
C(s, x)P (s, x; s, y)dx
R
R
Z
C(T, x)P (T, x; s, y)dx − C(s, y).
=
R
This gives us the equality:
Z
C(T, x)P (T, x; s, y)dx.
C(s, y) =
R
The pay-off of a call option is C(T, x) = max(x − K, 0) so:
Z x=∞
C(s, y) =
(x − K)P (T, x; s, y)dx.
x=K
Fixing s and y and differentiating twice with respect to K yields:
CKK (s, y; T, K) = P (T, K; s, y).
and consequently, using that P satisfies equation 8:
L(T,K) CKK (t, S; T, K) = 0.
We observe that KCKK (T, K) = ∂K KCK (T, K)−C and CKK (T, z −1 K) = z 2 ∂KK C(T, z −1 K).
Recall our choice of notation: CKK (T, z −1 K) denotes the derivative of C(T, K) with respect to its second variable evaluated at (T, z −1 K).
These observations and the above equation yield:
∂KK − CT + µ(T ) m(T )KCK − (m(T ) + 1)C + E J(T )C(T, J(T )−1 K)
1
+ σ 2 (T, K)K 2 CKK − rKCK = 0.
2
We integrate twice and observe that the left hand-side and its derivate with respect to
K goes to zero as K tends to infinity. This forces the integrating constants to be zero
and finishes the proof.
For easy of notation we shall assume from now on that, unless otherwise is explicitly
stated, the risk-free interest rate is zero: r = 0. Moreover we assume that the density of
the jump-size χ(t) is constant over time. For this reason we use only symbols χ and J
to denote χt and J(t) respectively.
6
JONAS KIESSLING
We conclude this section with introducing the two operators ψ1 , ψ2 and their adjoints:
ψ1 (C) = (m + 1)C − mKCK + E[JC(T, J −1 K)]
1
ψ2 (C) = K 2 CKK
2
ψ1∗ (C) = (m + 1)C + m∂K (KC) + E[J 2 C(T, JK)]
1
ψ2∗ (C) = ∂KK (K 2 C).
2
The forward equation satisfied by the call options can now be written as
(9)
(10)
CT = ψ1 (C) + ψ2 (C)
C(0, K) = max(S − K, 0).
3. The Optimal Control Problem
Consider an open set Ω ⊂ Rn and let V be some Hilbert space of functions on Ω
considered as a subspace of L2 (Ω) with its usual inner product. For a given cost functional
h : V × V → R, the optimal control problem consists of finding
Z T̂
h(ϕ, σ)dt
(11)
infσ:Ω×[0,T̂]→R
0
where ϕ : Ω × [0, T̂] → R is the solution to the differential equation
(12)
ϕt = f (ϕ, t; σ)
with a given initial function ϕ(·, 0) = ϕ0 . We call f the flux. For each choice of σ it is
a function f : V × [0, T̂] → R. Recall that ϕt denotes the partial derivative with respect
to t.
We refer to σ as the control and the minimizer of 11, if it exists, is called the optimal
control. We assume that σ takes values in some compact set B ⊂ R.
There are different methods for solving optimal control type problems. In this paper
we shall study the characteristics associated to the non-linear Hamilton-Jacobi-Bellman
equation. The first step is to introduce the value function U :
Z T
U (φ, τ ) = infσ:Ω×[τ,T ]→B
h(ϕ, σ)dt
ϕt = f (ϕ, t; σ) for all τ < t < T ,
τ
ϕ(·, τ ) = φ ∈ V .
The value function U solves the non-linear Hamilton–Jacobi–Bellman equation
(13)
Ut + H(Uφ , φ) = 0,
U (φ, T ) = 0
where H : V × V → R is the Hamiltonian associated to the above optimal control
problem
(14)
H(λ, ϕ) = infa:Ω→B < λ, f (ϕ, a) > +h(ϕ, a)
Crandall’s, Evans and Lions were able to show that the Hamilton-Jacobi-Bellman
equation has a well-posed viscosity solution [6]. Constructing a viscosity solution to
CALIBRATION OF A JUMP-DIFFUSION PROCESS USING OPTIMAL CONTROL
7
13 directly is however computationally very costly. We shall instead construct a regularization of the characteristics of 13 and solve the corresponding coupled system of
differential equations.
The well known method of characteristics associated to 13 yields the Hamiltonians
system
(15)
ϕt = Hλ (ϕ, λ)
λt = −Hϕ (ϕ, λ)
ϕ(·, 0) = ϕ0
λ(·, T ) = 0,
where Hλ and Hϕ denote the Gateaux-derivatives of H w.r.t. λ and ϕ respectively.
Recall that the Gateaux-derivative of a functional J : V → R at a vector f ∈ V is
defined as the vector representing
d g 7→ J(f + tg)
dt t=0
that is, in our case
Z
d H(ϕ + tg, λ) =:
gHϕ (ϕ, λ)dx
dt t=0
Ω
Typically H is not differentiable, forcing us to regularize it in order for 15 to make
sense. We are fortunate that in the case of interest to us, we can construct an explicit
regularization of the Hamiltonian.
4. Reconstructing volatility surface and jump intensity
4.1. The Hamiltonian System. Recall our model of the stock price and the corresponding integro-partial differential equation for call options that we presented in section
2 and summarized in equation 10. For now we assume that the density of the jump-size
is known, i.e. χ = χ(x) is some given function. In section 5 we return to this question
and indicate how this function can be determined in concrete examples.
The remaining unknown quantities in 10 are the local volatility function σ = σ(t, S)
and the jump intensity µ = µ(t). The problem of calibrating these from option prices
can be formulated as an optimal control problem. Recall the operators ψ1 , ψ2 and their
adjoint introduced in equation 9.
Suppose that Cm = Cm (T, K) are call options priced in the market, for different
strikes K ≥ 0 and maturities 0 ≤ T ≤ T̂. We wish to the determine the control (σ 2 , µ)
minimizing
Z T̂ Z
(16)
(C − Cm )2 dT dK
0
R+
given that C = C(T, K) satisfies
(17)
CT = µψ1 (C) + σ 2 ψ2 (C)
8
JONAS KIESSLING
with boundary conditions
C(K, 0) = max(S − K, 0)
C(0, T ) = S.
2 , σ 2 ] and µ ∈ [µ , µ ] for constants
We further assume that for all T and K, σ 2 ∈ [σ−
− +
+
σ− , σ+ , µ− and µ+ .
The problem as stated here is typically ill-posed as the solution often is very sensitive
small changes in Cm .
A common way to impose well-posedness is to add a Tikhonov regularization term to
34, e.g. for some α > 0 one determines
Z TZ
arg min(σ,µ)
(C − Cm )2 dT dK + α(kσk2 + kµk2 )
0
R+
with C subject to 17. See for instance [] for a discussion on Tikhonov regularizations.
We take a different approach. Using the material presented in the previous section, we
construct an explicit regularization of the Hamiltonian associated with 34 and 17 thus
imposing well-posedness on the value function. One can in fact view this as a special
kind of Tikhonov regularization, for more details see [4].
The Hamiltonian associated with the optimal control problem 34 and 17 becomes
Z
Z
Z
2
2
(18) H(λ, C) = inf(σ,µ) µ
λψ1 (C)dK +
σ λψ2 (C)dK +
(C − Cm ) dK .
R+
R+
Notice that only the sign of the terms
Z
λψ1 (C)dK
R+
and λψ2 (C)
R+
are important in solving the above optimization problem. This leads us to define the
following function
ax if x < 0
(19)
s[a,b] (x) =
bx if x > 0.
With the help of this function the Hamiltonian becomes
Z
(20)
H(C, λ) = s[µ− ,µ+ ]
λψ1 (C)dK
R+
Z
+
R+
s[σ−
2 ,σ 2 ]
+
Z
λψ2 (C) dK +
(C − Cm )2 dK.
R+
Recall that we assumed µ = µ(T ) to be independent of K whereas σ = σ(K, T ) is a
function of both T and K. This explains the different positions of s and the integral in
the expression for H above.
It is clear from 20 and 19 that the Hamiltonian is not smooth and that as a consequence
the control (σ, µ) will depend discontinuously on the solutions (C, λ) to the Hamiltonian
system. To avoid this problem we construct a regularization of the Hamiltonian.
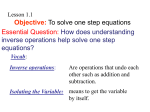
A straightforward regularization of the Hamiltonian is to approximate s(x) by
Z
b−a b+a x
−
tanh(y/δ)dy,
(21)
sδ,[a,b] (x) = x
2
2
0
CALIBRATION OF A JUMP-DIFFUSION PROCESS USING OPTIMAL CONTROL
δ > 0. The derivative of sδ
b−a b+a
−
tanh(x/δ)
2
2
s0δ,[a,b] (x) =
(22)
approaches a step function as δ tends to zero, see figure below.
3
3.5
2
3
1
0
2.5
−1
−2
2
−3
1.5
−4
−5
1
−6
−7
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
0.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Figure 1. Here a = 1 and b = 3. To the left: sδ for δ = 1(dashed), 0.1
(dot-dashed) and 0.0001 (solid) respectively. To the right: s0δ for the
same δ
This lets us define the regularized Hamiltonian H δ (C, λ) by
H δ (C, λ)
(23)
= sδ,[µ− ,µ+ ]
R
λψ1 (C)dK
R
R
2
+ R+ sδ,[σ−
λψ
(C)
dK
+
2 ,σ 2 ]
2
R+ (C − Cm ) dK.
+
R+
9
10
JONAS KIESSLING
We finally obtain the Hamiltonian system (see 15) associated to the regularized optimal control problem
R
0
0
CT
= sδ,[µ− ,µ+ ] R+ λψ1 (C)dK ψ1 (C) + sδ,[σ2 ,σ2 ] λψ2 (C) ψ2 (C)
− +
R
−λT
= s0δ,[µ− ,µ+ ] R+ λψ1 (C)dK ψ1∗ (λ)
∗
0
+ 2(C − Cm )
+ψ2 λsδ,[σ2 ,σ2 ] ψ2 (C)λ
−
(24)
C(K, 0)
C(0, T )
λ(K, T̂)
λ(0, T )
µδ
σδ
+
max(S − K, 0)
S
0
0
R
= s0δ,[µ− ,µ+ ] R+ λψ1 (C)dK
0
= sδ,[σ2 ,σ2 ] λψ2 (C) .
=
=
=
=
−
+
4.2. Discretization. We proceed by solving the Hamiltonian system 24. We suggest a
discretization in the time dimension based on an implicit symplectic Pontryagin scheme
described in [11]. The details are as follows.
We introduce a uniform partition of the time interval [0, T̂] with ∆t = T̂/N for some
integer N . We write C (j) (K) = C(K, j∆T ) and λ(j) (K) = λ(K, j∆T ) and demand that
they satisfy a symplectic implicit Euler scheme:
C (j+1) − C (j) = ∆T Hλδ (C, λ)(j)
(25)
λ(j) − λ(j+1) = ∆T HCδ (C, λ)(j)
where H δ (C, λ)(j) = H δ (C (j) , λ(j+1) ). Notice that we evaluate the Hamiltonian at different times for C and λ.
Remark 4.1. Symplecticity here means that the gradient of the discreet value function
coincides with the discreet dual:
U C (C (i) , t) = λ(i) .
Symplectic Euler is an example of a symplectic scheme. See chapter 6 in [12] for more
examples and a more thorough discussion of symplectic methods and their use. An
important property of the symplectic Euler method is that the numerical solution is an
exact solution of a perturbed Hamiltonian system. See or [11] for a detailed description
of the perturbed Hamiltonian.
The main result of [12] (see Theorem 4.1) states that if the Hamiltonian is Lipschitz
and if λ(j+1) has uniformly bounded variation with respect to C (j) for all j and ∆T then
the optimal solution to the Pontryagin problem 25 (C (j) , λ(j) ) satisfies the error estimate
(for δ ∼ ∆T )
Z T̂ Z
XZ
2
(j) 2
|inf
(C − Cm ) dKdT − ∆T
(C (j) − Cm
) dK| = O(∆T )
0
R+
j
R+
CALIBRATION OF A JUMP-DIFFUSION PROCESS USING OPTIMAL CONTROL
11
In the strike variable K we begin by truncating for large values: C(T, K) = 0 for
K > K̂, for some large K̂. Again we introduce a uniform grid on [0, K̂], ∆K = K̂/M , for
some integer M . We use the notation
(j)
= C(i∆K, j∆T )
(j)
= λ(i∆K, j∆T ).
Ci
λi
The next step is to discretize the operators 9. We use the standard central difference
quotients to approximate the derivatives
Ci+1 − 2Ci + Ci−1
Ci+1 − Ci−1
.
Di2 C =
2∆K
∆K 2
R
The integral E[JC(T, J −1 K)] = R+ zχ(z)C(T, z −1 K)dx is calculated by first truncating
for large values of z, say z > ẑ and then using the trapezoidal rule:
(27)
P
X
f (zk )C(T, i∆K/zk ) + f (zk+1 )C(T, i∆K/zk+1 )
E JC(T, J −1 K) ≈ E(C)i := ∆z
2
(26)
Di C =
k=0
where ∆z = ẑ/P , zk = k∆z and f (z) = zχ(z). The value of C(T, i∆K/zk+1 ) is
approximated using linear interpolation. Define the integers γ(i, k) by the rule γ(i, k) ≤
i/zk < γ(i, k) + 1. It is then possible to estimate
(28)
C(T, i∆K/zk ) ≈ (Cγ(i,k)+1 − Cγ(i,k) )(i/zk − γ(i, k)) + Cγ(i,k) .
We treat
E ∗ (C)i ≈ E[J 2 C(T, Ji∆K)]
in the same way.
This yields the discretization
(29)
ψ1 (C)i = m(i∆K)Di C − (m + 1)Ci + E(C)i
1
ψ2 (C)i = (i∆K)2 Di2 C
2
ψ ∗ (C)i = (m + 1)Ci + mDi (KC) + E∗i (C)
1
ψ ∗ (C)i = Di2 (K 2 C)
2
We can now approximate Hλδ and HCδ by
X (j+1)
(j)
δ
0
(j)
(30)
λk
ψ1 (C )k ψ1 (C (j) )i
Hλ (C, λ)i = sδ,[µ− ,µ+ ] ∆K
k
(j+1)
0
(j)
+ sδ,[σ2 ,σ2 ] λi
ψ2 (C )i ψ2 (C (j) )i
− +
Z
(j)
HCδ (C, λ)i = s0δ,[µ− ,µ+ ]
λψ1 (C)dK ψ1∗ (λ)i
R+
+ 2(C − Cm )i .
+ ψ2∗ λs0δ,[σ2 ,σ2 ] ψ2 (C)λ
−
+
i
12
JONAS KIESSLING
Finally we summarize the above and obtain the completely discretized Hamiltonian
system
(31)
(j+1)
Ci
(j)
(j)
− Ci
(j+1)
λi − λi
(j)
= ∆T Hλδ (C, λ)i
= ∆T HCδ (C, λ)i (j)
Ci (0) = max(S − i∆K, 0)
(j)
C0 = S
(j)
CM = 0
(N )
λi
=0
(j)
λ0 = 0
(j)
λM = 0
µ
s0δ,[µ− ,µ+ ]
X (j+1)
(j)
∆K
λk
ψ1 (C )k
(j)
=
(j)
(j+1)
0
(j)
= sδ,[σ2 ,σ2 ] λi
ψ2 (C )i .
k
σi
−
+
Recall that µ and σ actually depends on the parameter δ.
4.3. The Newton Method. In order to solve the Hamiltonian system 31, one could
use some fixed-point scheme that in each iteration removed the coupling by solving
the equations for C and λ separately. This method as the advantage of being easy to
implement but the major drawback of very slow (if any) convergence to the optimal
solution.
We shall instead use our information about the Hessian and solve 31 with the Newton
method. The details are as follows.
We introduce the two functions F δ , Gδ : RM N → RM N :
(32)
(j+1)
F δ (C, λ)i+j∗N = Ci
(j)
Gδ (C, λ)i+j∗N = Ci
(j)
− Ci
(j+1)
− Ci
δ
− ∆T Hλ,ij
δ
− ∆T HC,ij
.
We seek (C, λ) such that F δ (C, λ) = Gδ (C, λ) = 0.
Starting with some initial guess (C[0], λ[0]), the Newton method gives
C[k + 1]
C[k]
X[k]
(33)
=
−
λ[k + 1]
λ[k]
Y [k]
where (X[k], Y [k]) is the solution to the following system of linear equations
X[k]
F (C[k], λ[k])
Jk
=
Y [k]
G(C[k], λ[k])
We let Jk denote the Jacobian of (F, G) : R2M N → R2M N evaluated at (C[k], λ[k]).
Unsurprisingly the smaller the regularizing parameter δ, the harder for 33 to converge,
in particular smaller δ requires better initial guess. Since ultimately we wish to solve
CALIBRATION OF A JUMP-DIFFUSION PROCESS USING OPTIMAL CONTROL
13
the Hamiltonian system for very small δ, we are led to the following iterative Newton
scheme, bringing δ down successively:
(1) Let δ be not to small (usually δ ≈ 1 will do).
(j)
(j)
(2) Set Ci [0] = max(S − i∆K, 0) and λi [0] = 0.
(3) Do until δ < δ0
(a) Iterate equation 33 until k(F (C[k], λ[k]), G(C[k], λ[k]))k < TOL
(b) Set new initial value (C[0], λ[0]) as the solution obtained in the step above
above.
(c) Bring δ down by some factor 0 < β < 1 (typically β ≈ 0.7 will do).
5. Numerical Examples
5.1. Artificial Data no Jumps. As a first example we applied the method presented
above to solve the calibration problem 34 without jumps. That is, from a set of solutions
{Cm (K, T )} we are trying to deduce σ(K, T ) by minimizing
Z T̂ Z
(34)
(C − Cm )2 dT dK,
0
R+
where C(T, K) solves
(35)
1
CT = K 2 CKK
2
C(K, 0) = max(S − K, 0).
To test that the method does indeed converge we picked a function σ(S, t), then by solving 35 we obtained a solution Cm (K, T ). Using this solution we reconstructed σ(K, T ).
The result is presented in the figure below. It appears that one can reconstruct σ(T, K)
to a very high degree of accuracy. It should also be noted that the regularizing parameter
δ virtually could be eliminated, thus obtaining a nearly perfect fit of calibrated prices
C(T, K) to market prices Cm (T, K).
5.2. Artificial Data with Jumps. A more interesting example is obtained by generating option prices using the full jump-diffusion model 3. We assume that the relative
jump sizes J are log-normally distributed with mean 0 and variance 1, i.e.
logJ ∼ N (0, 1).
Option prices Cm are generated by solving 10 with some prescribed functions σ and
µ. We then reconstruct σ and µ using the above described method. The result is
presented in figure 3 below. Again the quality of the reconstructed data is very good.
The calibrated volatility σ and jump intensity µ can be brought arbitrarily close to its
”true” prescribed values.
5.3. Real Data. We conclude this section and the paper with an example from the
S&P - 500 market.
In order to compare the described calibration method with existing methods we decided to re-calibrate the model calibrated in [1]. Andersen and Andreasen collected a
set of bid and ask prices for call options on the S&P-500 index in April 1999. At page
14
JONAS KIESSLING
−3
10
−4
10
0.35
0.35
0.3
0.3
10
0.25
0.25
10
0.2
0.2
0.15
0.15
10
0.1
0.1
10
−5
10
−6
error
−7
−8
10
−9
−10
−11
2.5
1
2
0.8
1.5
0.6
1
1
2
0.8
1.5
0.6
1
0.4
0.5
K
10
2.5
0.5
0.2
T
−12
10
0.4
T
−13
0.2
10
K
−15
10
−10
−5
10
10
0
10
delta
2 (K, T ) = 0.1+0.2T K/3 with
Figure 2. Reconstruction of volatility σtrue
−9
2
2
δ = 10 , σ− = 0.1 and σ+ = 0.35 with no jump present. In this
experiment S = 1, K̂ = 3 and T̂ = 1. We used a grid size of M = N = 50.
2
The three plots shows, from left to right: 1. The true volatility σtrue
used
to generate ”quoted” option prices Cm . 2. The reconstructed volatility
σ 2 for δ = 10−10 and 3. The L2 -error in option prices as a function of the
regularizing parameter δ: kC − Cm k2L (δ).
11 in [1] a table of bid and ask volatilities is presented. We will focus only on data for
options with maturities no more than 12 months.
The first step in the calibration is to determine the distribution of the jump sizes.
In [1] the authors assumes that the jumps are log-normally distributed with unknown
mean α and variance β 2 . They determine α and β by assuming that also σ and µ are
constant. That is, they calibrate the Levy-process (q denotes the dividend yield)
(36)
dSt /St− = (r − q − µm)dt + σdB(t) + (J − 1)dπt .
They then do a best fit (in least-square sense) of the above process to mid-implied
volatilities. The resulting parameters are
(37)
σ = 17.65%
(38)
µ = 8.90%
(39)
α = −88.98%
(40)
β = 45.05%
We assume that the above parameters determine the jump size distribution and proceed by calibrating the state and time dependent volatility and time dependent intensity
using the optimal control scheme. Note that the interest rate is non-zero and that there
is a dividend yield. It is straightforward to obtain the forward equation with a yield
term present, corresponding to 5 (see for instance equation 4 in [1]).
CALIBRATION OF A JUMP-DIFFUSION PROCESS USING OPTIMAL CONTROL
15
0.3
0.2
0.1
3
0.25
2.5
2
1.5
1
0.5
0.2
0
K
0.4
0.6
0.8
1
0.2
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.6
0.7
0.8
0.9
1
T
T
0.3
0.2
0.25
0.1
2.5
2
1.5
1
0.5
0.2
T
0.4
0.6
0.8
1
0.2
0.1
0.2
0.3
0.4
0.5
T
K
0
10
L2−error
1
0.5
0
1
0.5
0
3
2
2.5
1.5
1
0.5
−5
10
−5
10
−4
10
−3
−2
10
10
−1
10
0
10
delta
K
T
Figure 3. Reconstruction of volatility and jump intensity when
2
σtrue
(K, T ) = 0.1 + 0.2T K/3
and
µ = 0.2 − 0.4((t − 0.5)2 − 0.25).
2 = 0.1, σ 2 = 0.35, µ = 0.2 and
Here we show results for δ = 10−4 , σ−
−
+
µ+ = 0.3. In this experiment S = 1, K̂ = 3 and T̂ = 1. We used a grid
size of M = 80 and N = 20. The six plots from top left to bottom right
2 . 2. True jump intenrepresents respectively: 1. The true volatility σtrue
2
−10
sity. 3. Reconstructed volatility σ for δ = 10 . 4. Reconstructed jump
intensity. 5. The price surface obtained using reconstructed prices. 6.
The L2 -error in option prices as a function of the regularizing parameter
δ: kC − Cm k2L (δ).
As before we let Cm = Cm (T, K) denote the market price of options. The optimal
control problem consists of minimizing
Z T̂ Z
w(T, K)(C − Cm )2 dT dK
(41)
0
R+
where we have introduced a weight function w to accommodate for the fact the Cm is
not known everywhere. The specific weight function used in the calibration is
X
w(T, K) =
δ(T − Ti )δ(K − Ki )
(Ti ,Ki )∈I
with the sum taken over all values (Ti , Ki ) for which we have a market price.
We are now in a position to apply the technique explained in the previous section.
The jump intensity was found to be roughly constant over time and equal to
µ(T ) = 16.5%
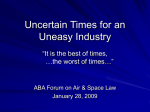
The resulting local volatility σ is plotted in figure 4. We used the constant values in
37 as starting values of σ andµ. The method worked well in the sense that we had
16
JONAS KIESSLING
problem with convergence and the resulting volatility surface and intensity function
were not reasonable. Using the calibrated measure we could reproduce the option prices
to within the bid-ask spread.
One drawback with this technique is that one needs an explicit Hamiltonian and
preferably an explicit expression of the Hessian. If this is not present then it becomes
much more computationally costly, but still possible, to carry out the optimization. This
will for instance be the case if we try to determine also the jump distribution in this
example using optimal control.
0.26
0.24
0.22
0.2
0.18
0.16
0.14
0.12
130
1
125
120
115
110
105
0.5
100
PRICE
95
90
85
80
0
TIME
Figure 4. Local diffusion volatilities for the S&P500 index, April 1999.
Local volatilities for jump-diffusion model when fitted to S&P500 option
prices. First axis is future spot relative current and second axis is time
in years. Jump parameters are α = −88.89% and β = 45.05%. The jump
intensity was calibrated to µ(t) = 16.5%.
References
[1] Leif Andersen and Jesper Andreasen. Jump-diffusion processes: Volatility smile fitting and numerical methods for option pricing. Review of Derivatives Research, 4(4):231–262, 2000.
[2] Davis Bates. Jumps and stochastic volatility: Exchange rate processes implicit in deutsche mark
options. The Review of Financial Studies, 9:69–107, 1996.
[3] F. Black and M. Scholes. The pricing of options and corporate liabilities. Journal of Political Economy, 81:637–654, 1973.
[4] Jesper Carlsson. Symplectic reconstruction of data for heat and wave equations. arXiv:0809.3621v1.
[5] Rama Cont and Peter Tankov. Financial modelling with jump processes. Chapman & Hall/CRC
Financial Mathematics Series. Chapman & Hall/CRC, Boca Raton, FL, 2004.
[6] M. G. Crandall, L. C. Evans, and P.-L. Lions. Some properties of viscosity solutions of HamiltonJacobi equations. Trans. Amer. Math. Soc., 282(2):487–502, 1984.
[7] Bruno Dupire. Pricing and hedging with smiles. In Mathematics of derivative securities (Cambridge,
1995), volume 15 of Publ. Newton Inst., pages 103–111. Cambridge Univ. Press, Cambridge, 1997.
[8] Steven L. Heston. A closed-form solution for options with stochastic volatility with applications to
bond and currency options. The Review of Financial Studies, 6(2):327–342, 1993.
[9] Jonas Kiessling and Raul Tempone. Diffusion approximation of lévy processes with applications in
finance. Unpublished.
CALIBRATION OF A JUMP-DIFFUSION PROCESS USING OPTIMAL CONTROL
17
[10] Robert Merton. Option pricing when underlying stock returns are discontinuous. Journal of Financial Economics, 3:125–144, 1976.
[11] Mattias Sandberg. Extended applicability of the symplectic pontryagin method. arXiv:0901.4805v1.
[12] Mattias Sandberg and Anders Szepessy. Convergence rates of symplectic Pontryagin approximations
in optimal control theory. M2AN Math. Model. Numer. Anal., 40(1):149–173, 2006.
[13] W Schoutens, E Simons, and J Tistaert. A perfect calibration! now what? Wilmott, 2004(2):66–78,
2004.