Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
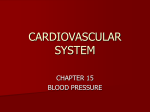
CHAPTER 6 ___________________________________________________________ GSM BASED NIBP MEASUREMENT SYSTEM ___________________________________________________________ 6.1 Introduction Blood pressure measurement is one of the basic clinical examinations. The origin of blood pressure is the pumping action of the heart and its value depends on the relationship between cardiac output and peripheral resistance. Therefore, blood pressure is considered as one of the most important physiological variables with which to assess cardiovascular hemo-dynamics. Blood pressure (BP) is the pressure exerted by circulating blood upon the walls of blood vessels and is one of the principal vital signs. Blood pressure is also defined, as it is the force created by the heart as it pushes blood into the arteries through the circulatory system. Each time the heart contracts or “beats” the blood is pumped out and creates a surge of pressure in the arteries. Blood pressure is the force exerted by circulating blood on the walls of blood vessels. The pressure of the circulating blood decreases as blood moves through arteries, arterioles, capillaries, and veins; the term blood pressure generally refers to arterial pressure [1], i.e., the pressure in the larger arteries, arteries being the blood vessels which take blood away from the heart. Fig 6.1 shows the force applied to artery walls for measureement of Blood Pressure. Blood pressure usually refers to the arterial pressure of the systemic circulation, usually measured at a person's upper arm. Fig 6.1: Blood pressure is the measurement 238 A person’s blood pressure is usually expressed in terms of the systolic pressure over diastolic pressure and is measured in millimeters of mercury. The systolic arterial pressure is defined as the peak pressure in the arteries, which occurs near the beginning of the cardiac cycle. The diastolic arterial pressure is the lowest pressure (at the resting phase of the cardiac cycle). The average pressure throughout the cardiac cycle is reported as mean arterial pressure. The pulse pressure reflects the difference between the maximum and minimum pressures measured. The blood pressure values are reported in millimeters of mercury (mmHg). Systolic Pressure (SP) The maximum pressure reached during peak ventricular ejection. Systolic pressure [2] is the pressure generated when the heart contracts. Diastolic Pressure (DP) The minimum pressure just before beginning of ventricular ejection. Diastolic pressure is the blood pressure when the heart is relaxed. Table 1: Classification of blood pressure for adults Category Systolic (mmHg) Diastolic (mmHg) Hypotension < 90 or < 60 Normal 90 – 119 and 60 – 79 Prehypertension 120 – 139 or 80 – 89 Stage 1 Hypertension 140 – 159 or 90 – 99 Stage 2 Hypertension ≥ 160 or ≥ 100 Typical values for a resting healthy adult human are approximately 120 mmHg (16 kPa) systolic and 80 mmHg (11 kPa) diastolic written as 120/80 mmHg. These measures of arterial pressure are not static, but undergo natural variations from one heartbeat to another and throughout the day, they also change in response to stress, nutritional factors, drugs, or disease. Hypertension refers to arterial pressure being abnormally high, as opposed to hypotension, when it is abnormally low along with body temperature. The table 1 shows the classification of blood pressure for adults aged 18 and older. Pulse pressure (PP) is the difference between SP and DP, i.e., PP = SP - DP. The period from the end of one heart contraction to the end of the next is called the cardiac cycle. Mean pressure (MP) is the average pressure during a cardiac cycle. 239 Mathematically, MP can be decided by integrating the blood pressure over time. When only SP and DP are available, MP is often estimated by an empirical formula: MP = DP + (PP/ 3) ----------------------------------- (1) The values of blood pressure vary significantly during the course of 24 h according to an individual’s activity [3]. Basically, three factors, namely, the diameter of the arteries, the cardiac output, and the state or quantity of blood, are mainly responsible for the blood pressure level. When the tone increases in the muscular arterial walls so that they narrow or become less compliant, the pressure becomes higher than normal. Unfortunately, increased blood pressure does not ensure proper tissue perfusion and in some instances, such as certain types of shock, blood pressure may seem appropriate when peripheral tissue perfusion has all but stopped. The observation of blood pressures affords dynamic tracking of pathology and physiology affecting the cardiovascular system. This system in turn has pro- found effects on the other organs of the body. The measurement of blood pressure requires the anatomy and physiology of heart. 6.2 Anatomy & Physiology of the Heart The human heart is located under the ribcage in the center of the chest between the right and left lung. It’s shaped like an upside-down pear. Its muscular walls beat, or contract, pumping blood continuously to all parts of the body. The size of the heart can vary depending on the age, size, or the condition of the heart. A normal, healthy, adult heart most often is the size of an average clenched adult fist. Some diseases of the heart can cause it to become larger. The exterior human heart of a normal and healthy person is as shown in fig 6.2. The heart has four chambers. The right and left atria (AY-tree-uh) are shown in purple. The right and left ventricles (VEN-trih-kuls) are shown in red. Connected to the heart are some of the main blood vessels—arteries and veins—that make up the blood circulatory system. 240 Fig 6.2: External Heart Anatomy The ventricle on the right side of the heart pumps blood from the heart to the lungs. When a person breathes air in, oxygen passes from the lungs through blood vessels where it’s added to the blood. Carbon dioxide, a waste product is passed from the blood through blood vessels to the lungs and is removed from the body when the person breathes air out. The atrium on the left side of the heart receives oxygen-rich blood from the lungs. The pumping action of the left ventricle sends this oxygen-rich blood through the aorta (a main artery) to the rest of the body. 6.3. Blood Pressure Measurement Principle & Techniques BP measurement is a physiological variable, which indicates the status of cardiovascular system. Determination of only its maximum and minimum levels during each cardiac cycle, supplemented by information about other physiological parameters is an invaluable diagnostic and to assess the vascular condition and certain aspects of cardiac performance. In the heart, blood is pumped by the left heart into the aorta, which supplies it to arterial circuit, due to load resistance of arterioles and precapillaries. It loses most of its pressure and returns to heart at low pressure via highly distensible veins. Right heart pumps it to the pulmonary circuit. This operates at lower pressure. Blood 241 pressure measurements are made with reference to atmospheric pressure, which saves persons. If BP is high, i.,e hypertension [4], it gives warning to provide treatment. Arterial pressure is most commonly measured via a sphygmomanometer [5] which uses the height of a column of mercury to reflect the circulating pressure. The blood pressure is measured by means of indirect method using sphygmomanometer (i.e. sphygmo means pulse). This method is easy to use and can be automated. It can measure systolic and diastolic arterial pressure readings. Modern vascular pressure devices no longer use mercury, vascular pressure values are reported in millimeters of mercury (mmHg). The basis of any physiological measurement is the biological signal, which is first sensed and transduced or converted from one form of energy to another. The signal is then Conditioned, Processed and Amplified. Subsequently, it is displayed and recorded. Blood pressure sensors often detect mechanical signals, such as blood pressure waves, to convert them into electric signals for further processing or transmission. They work on a variety of principles, for example, resistance, inductance, and capacitance. For accurate and reliable measurements a sensor should have good sensitivity, linearity and stability [6]. In general the Blood Pressure measurement techniques are made using two types. They are Direct Blood Pressure Measurement In- Direct Blood Pressure Measurement 6.3.1. Direct Blood Pressure Measurement Direct measurement is also called Invasive measurement because bodily entry is made. Arterial blood pressure (BP) is most accurately measured invasively through an arterial line. For direct arterial blood pressure measurement an artery is cannulated or catheter. The equipment and procedure require proper setup, calibration, operation, and maintenance [7]. Such a system yields blood pressures dependent upon the location of the catheter tip in the vascular system. The cannula must be connected to a sterile, fluid-filled system, which is connected to an electronic pressure transducer. The advantage of this system is that pressure is constantly monitored beat-by-beat and a waveform (a graph of pressure against time) can be displayed. When massive blood loss is anticipated, powerful cardiovascular medications are suddenly administered or 242 a patient is induced to general anesthesia, continuous monitoring of blood pressures becomes vital. This is usually done by an anesthesiologist or surgeon in a hospital. Most commonly used sites to make continuous observations are the brachial and radial arteries. The femoral or other sites may be used as points of entry to sample pressures at different locations inside the arterial tree or even the left ventricle of the heart. Entry through the venous side of the circulation allows checks of pressures in the central veins close to the heart, the right atrium, the right ventricle and the pulmonary artery. A catheter with a balloon tip carried by blood flow into smaller branches of the pulmonary artery can occlude flow in the artery from the right ventricle so that the tip of the catheter reads the pressure of the left atrium, just downstream. These procedures are very complex and there is always concern of risk of hazard as opposed to benefit [8]. Invasive access to a systemic artery involves considerable handling of a patient. The longer a catheter stays in a vessel, the more likely an associated thrombus will form [9]. In the newborn, when the arterial catheter is inserted through an umbilical artery, there is a particular hazard of infection and thrombosis, since thrombosis from the catheter tip in the aorta can occlude the arterial supply to vital abdominal organs. Some of the recognized contraindications and complications include poor collateral flow, severe hemorrhage diathesis, occlusive arterial disease, arterial spasm, and hematoma formation [10]. Direct blood pressure measurement is generally accepted as the gold standard of arterial pressure recording and also confers the benefit of continuous access to the artery for monitoring gas tension and blood sampling for biochemical tests. It also has the advantage of assessing cyclic variations and beat-to-beat changes of pressure continuously and permits assessment of short-term variations [11], [12]. Disadvantages with invasive blood pressure measurement The cannulation for invasive vascular pressure monitoring is infrequently associated with complications such as thrombosis, infection, and bleeding. Patients with invasive arterial monitoring require very close supervision, as there is a danger of severe bleeding if the line becomes disconnected. It is generally reserved for patients where rapid variations in arterial pressure are anticipated. 243 6.3.2 Indirect Blood Pressure Measurement Indirect measurement is often called Non-Invasive measurement because the body is not entered in the process. The upper arm, containing the brachial artery, is the most common site for indirect measurement because of its closeness to the heart and convenience of measurement, although many other sites may have been used, such as forearm or radial artery, finger, etc. Distal sites such as the wrist, although convenient to use, may give much higher systolic pressure than brachial or central sites as a result of the phenomena of impedance mismatch and reflective waves [13]. An occlusive cuff is normally placed over the upper arm and is inflated to a pressure greater than the systolic blood pressure. The cuff is then gradually deflated, while a detector system simultaneously employed determines the point at which the blood flow is restored to the limb. The detector system does not need to be a sophisticated electronic device. It may be as simple as manual palpation of the radial pulse. The most commonly used indirect methods are Auscultation and Oscillometry each is described below. 6.3.2.1. Auscultator Method The Auscultator method most commonly employs a mercury column, an occlusive cuff and a stethoscope [14]. The stethoscope is placed over the blood vessel for auscultation of the Korotkoff sounds, which defines both SP and DP. First raised cuff pressure until it stopped blood circulation on the distal side of the hand, indicated by palpating the radial artery. During the following slow pressure drop, audible sounds could be heard through the stethoscope, which was placed on the skin beyond the sleeve. These sounds were affected by the blood wave in the artery under the cuff and were audible at 10-12 mmHg, slightly before the pulse could be palpated on the radial artery [15]. At this point, cuff pressure is taken to indicate maximum blood pressure, while minimum blood pressure is achieved when the murmur sounds disappear. The appearance and disappearance of sound can be used to determine systolic and diastolic blood pressure, respectively. The Korotkoff sounds are mainly generated by the pulse wave propagating through the brachial artery [16]. The Korotkoff sounds consist of five distinct phases. The onset of Phase I Korotkoff sounds (first appearance of clear, repetitive, tapping sounds) signifies SP and the onset of Phase V Korotkoff sounds (sounds disappear 244 completely) often defines DP [17]. Fig 6.3 shows the summary of the five Korotkoff sounds a patient. The pressure is then reduced slowly (about 2−3 mmHg a second) and 4 (or 5) different ‘phases’ of Korotkoff sounds are by the clinician over sequential pressure ranges: i. Initial "tapping" sounds. ii. The tapping sounds increases in intensity are less precise in time. iii. The loudest phase, more akin to a thump than a tap. iv. A much more muffled sound. v. Silence − no Korotkoff sounds Fig 6.3: A summary of the five Korotkoff sounds for a healthy human Observers may differ greatly in their interpretation of the Korotkoff sounds. Simple mechanical error can occur in the form of air leaks or obstruction in the cuff, coupling tube or Bourdon gage. Mercury can leak from a column gage system. In spite of the errors inherent in such simple systems, more mechanically complex systems have come into use. The impetus for the development of more elaborate detectors has come from the advantage of reproducibility from observer to observer and the convenience of automated operation. Examples of this improved instrumentation include sensors using plethysmo-graphic principles, pulse-wave velocity sensors and audible as well as ultrasonic microphones [18]. The readings by auscultation do not always correspond to those of intra-arterial pressure. The differences are more pronounced in certain special occasions such as obesity, pregnancy, arteriosclerosis, shock, etc. Experience with the auscultation method has also shown that determination of DP is often more difficult and less reliable than SP. However, the situation is different for the oscillometric method 245 where oscillations caused by the pressure pulse amplitude are interpreted for SP and DP according to empirical rules [19]. Measurements based on the auscultator method are difficult to automate, because the frequency spectrum of the different phases of Korotkoff sounds is closely related to blood pressure. When a patient’s blood pressure is high, also the recorded frequency spectrum is higher than normal and decreases as a function of blood pressure. With hypotensive patients and infants, on the other hand, the highest spectrum components can be as low as 8 Hz (Whitcher et al. 1966 and 1967), which is below the human hearing bandwidth. Normotensive subjects, in turn, require a bandwidth of 20 Hz to 300 Hz for a sufficient reproduction of Korotkoff sounds (Geddes 1991), although most of the energy of the signal spectrum is below 100 Hz. Fig 6.4: Indirect blood pressure measurements: Oscillometric & Auscultator measurement. 6.3.2.2. Oscillometric Method In recent years, electronic pressure and pulse monitors based on oscillometry have become popular for their simplicity of use and reliability. The principle of blood pressure measurement using the oscillometric technique is dependent on the transmission of intra-arterial pulsation to the occluding cuff surrounding the limb. An approach using this technique could start with a cuff placed around the upper arm and rapidly inflated to about 30 mmHg above the systolic blood pressure, occluding blood flow in the brachial artery. The pressure in the cuff is measured by a sensor. The 246 pressure is then gradually decreased, often in steps, such as 5 to 8 mmHg. The oscillometric signal is detected and processed at each step of pressure. The cuff pressure can also be deflated linearly in a similar fashion as the conventional auscultator method. Fig 6.4 illustrates the principle of oscillometric measurement along with auscultator measurement. Arterial pressure oscillations are superimposed on the cuff pressure when the blood vessel is no longer fully occluded. Separation of the superimposed oscillations from the cuff pressure is accomplished by filters that extract the corresponding signals. Signal sampling is carried out at a rate determined by the pulse or heart rate. The oscillation amplitudes are most often used with an empirical algorithm to estimate SP and DP. Unlike the Korotkoff sounds, the pressure oscillations are detectable throughout the whole measurement, even at cuff pressures higher than SP or lower than DP. Since many oscillometric devices use empirically fixed algorithms, variance of measurement can be large across a wide range of blood pressures [20]. MP is determined by the lowest cuff pressure of maximum oscillations [21] and has been strongly supported by many clinical validations [22], [23]. 6.4. Review of Earlier literature of Blood pressure measurement The ancient Greek physician Galen first proposed the existence of blood in the human body. Building on ideas conceived by Hippocrates, the body was comprised of three systems. The brain and nerves were responsible for sensation and thought. The blood and arteries filled the body with life-giving energy. He also believed that the liver and veins provided the body with nourishment and growth. The first recorded instance of the measurement of blood pressure was in 1733 by the Reverend Stephen Hales [24]. A British veterinarian, Hales spent many years recording the blood pressures of animals. In 1847 human blood pressure was recorded. The method used Carl Ludwig's kymograph with catheters inserted directly into the artery. 247 Etienne Jules Mary, a French physician/cinematographer, developed this idea further in 1860. His sphygmograph could accurately measure the pulse rate, but was very unreliable in determining the blood pressure. Yet this design was the first that could be used clinically was a small degree of success. Fig 6.5: sphygmomanometer In 1881, Samuel Siegfried Karl Ritter von Basch invented the sphygmomanometer shown in fig 6.5, consisted of a water-filled bag connected to a manometer. The manometer was used to determine the pressure required to obliterate the arterial pulse. Direct measurement of blood pressure by catheterisation confirmed that von Basch's design would allow a non-invasive method to measure blood pressure. Feeling for the pulse on the skin above the artery, was used to determine when the arterial pulse disappeared. Scipione Riva-Rocci developed the mercury sphygmomanometer in 1896. This design was the prototype of the modern mercury sphygmomanometer. An inflatable cuff was placed over the upper arm to constrict the brachial artery. This cuff was connected to a glass manometer filled with mercury to measure the pressure exerted onto the arm. Riva-Rocci's sphygmomanometer was spotted by the American neurosurgeon Harvey Cushing while he was travelling through Italy. Seeing the potential benefit he returned to the US with the design in 1901. After the design was modified for more clinical use, the sphygmomanometer became commonplace. Cushing and George Crile were major advocates of the benefits. Nikolai Korotkoff was the first to observe the sounds made by the constriction of the artery in 1905. Korotkoff found that there were characteristic sounds at certain points in the inflation and deflation of the cuff. These Korotkoff sounds [25] were caused by the abnormal passage of blood through the artery, 248 corresponding to the systolic and diastolic blood pressures. A crucial difference in Korotkoff's technique was the use of a stethoscope to listen for the sounds of blood flowing through the artery. This auscultatory method proved to be more reliable than the previous palpitation techniques and thus became the standard practice. Modern developments have led to more accurate auscultatory sphygmomanometers, and newer oscilliometric models. These sphygmomanometers measure the pressure imparted onto the cuff by the turbulent blood squirting through the constricted artery over a range of cuff pressures. This data is used to estimate the systolic and diastolic blood pressures. Most noninvasive blood pressure monitors are based either on the auscultation (AUS) [26] or the oscillometric (OSC) method [27]. The former relies on detecting so-called Korotkoff sounds (automated recording or manual auscultation with a stethoscope) using decreasing cuff pressure and is mainly used in the clinical environment. The electronic palpation (EP) method was firstly introduced in 1998 by Nissila, Sorvoja and Vieri-Gashi. It uses a standard occlusion cuff around the upper arm and a wristwatch type of multi-element pressure transducer array to sense pulsations in the radial artery. Measurements can be made both during increasing and decreasing cuff pressure, also referred to as inflating and deflating pressure mode in this presentation. In these measurements, diastolic blood pressure was defined as the point where the pulse amplitude of the blood pressure signal starts to decrease, while systolic blood pressure was defined as the last pulse detected. Diastolic blood pressure can be defined using two fitted lines that cross at the diastolic pressure. 6.5. Hardware Development In general Blood pressure is typically measured using a sphygmomanometer and stethoscope of oscillometric methods by Doctors, which are analog devices. A similar method is used in the present study to measure blood pressure [28], which is called the oscillometric method [29]. There is an electronic pressure sensor connected to the cuff instead of a sphygmomanometer. The cuff is inflated to a pressure high enough to stop circulation to the wrist and then slowly decreased. At 249 systolic pressure, oscillations will begin in the pressure sensor output. Continuing to decrease the pressure, the diastolic pressure is read when the oscillation stops. Automated electronic devices have been developed to take blood pressure readings at the press of a button can reduce error and require no training and stores the data with real time for further processing and analysis of BP. In the present work we design the BP meter using Raspberry Pi and Pressure Sensor. 6.6 Hardware The present design is a non-invasive Blood Pressure meter. The implementation of Blood Pressure meter device is by cascading several stages as shown in fig 6.6 which depicts the system block diagram and fig 6.7 describes the circuit diagram of GSM based Blood pressure measurement system. The device hardware consists of different units and explanation for each unit is given individually. They are Block diagram Fig 6.6: Block diagram of the GSM based Blood Pressure System 250 Circuit diagram Fig 6.7: circuit diagram of Blood Pressure Measurement system 1. Sensor unit with Cuff 2. Signal conditioning unit a. Filter b. Analog to Digital converter PCF8591 3. Central processing unit ARM11J6JZF 4. Motor control unit 5. Graphical LCD Display. 6. Universal Serial Bus 7. GSM-SIM500 6.6.1. Sensor Unit with Cuff In this unit the pressure sensor senses the signals from the patient and transmits the signals to next stage of signal condition unit. The pressure transducer used is a 251 piezoresistive pressure sensor, which generates a changing output voltage proportional to the applied pressure, with a measurement range from 0 to 50 kPa (0–7.3 PSI) with high accuracy. This sensor has temperature compensation and offset calibration. It is a monolithic silicon pressure sensor in which the “strain gauge”, the diaphragm and the resistive network are integral parts of the same chip. Applying pressure to the diaphragm results in a resistance change in the “strain gauge”, which in turn causes a change in the output voltage in direct proportion to the applied pressure [30]. The diagram of fully integrated pressure sensor MPXV5050GP of pressure sensor is shown in fig 6.8. The output of the pressure sensor connecting with amplifier LM224, ADC is shown in fig 6.9 and fig 6.10 respectively. . Fig 6.8: The Schematic Diagram of Fully Integrated Pressure Sensor The MPXV5050GP is piezoresistive transducer is a state-of-the art monolithic silicon pressure sensor designed in present applications, which particularly employing a micro controller with A/D inputs. This is a single element transducer combines advanced micro machining techniques, thin-film metallization and bipolar processing to provide an accurate, high level analog output signal that is proportional to the applied pressure. Specification of the CUFF SIZE AND PLACEMENT Both the length and width of an occluding cuff are important for accurate and reliable measurement of blood pressure by indirect methods. A too-short or toonarrow cuff results in false high blood pressure readings. Several studies have shown that a cuff of inappropriate size in relation to the patient's arm circumference can cause considerable error in blood pressure measurement [31]. The cuff should also fit around the arm firmly and comfortably. Some manufacturers have designed cuffs with a fastener spaced so that a cuff of appropriate width only fits an arm of appropriate 252 diameter. With this design, the Cuff will not stay on the arm during inflation unless it fits accordingly. According to American Heart Association (AHA) [32] recommendations the width of the cuff should be 40% of the mid circumference of the limb and the length should be twice the recommended width. The proper cuff and bladder size used in the assessment of blood pressure is important for accurate measurement. We sought to determine the most commonly used cuff size [33] needed for accurate blood pressure measurement for patients. The cuff size chosen for measure of blood pressure with a mercury sphygmomanometer was determined based on the following cuff size parameters:<9.5 inches (Child's cuff); 9.5-12inches (Regular adult cuff); 13-16.5 inches (Large adult cuff); >16.5 inches(Thigh cuff) Based on mean arm circumferences, the most frequently used cuff size required for accurate blood pressure measurement in this hypertensive, overweight population is the large adult cuff. Recommended cuff sizes are listed in Table 2. Table :2 Recommended Cuff Sizes for Accurate Measurement of Blood Pressure PATIENT RECOMMENDED CUFF SIZE Adults (by arm circumference) 22 to 26 cm 12 × 22 cm (small adult) 27 to 34 cm 16 × 30 cm (adult) 35 to 44 cm 16 × 36 cm (large adult) 45 to 52 cm 16 × 42 cm (adult thigh) Children (by age)* Newborns and premature infants 4 × 8 cm Infants 6 × 12 cm Older children 9 × 18 cm *—A standard adult cuff, large adult cuff, and thigh cuff should be available for use in measuring a child’s leg blood pressure and for children with larger arms 253 6.6.2 Signal conditioning unit Any Instrumentation measurement systems consist of various units staring from sensors to data representation units. Among that signal conditioning is a vital process. This system consists of Amplifiers, Filters, ADC etc. the Bio-Medical instrumentation consists of signal conditioning and processing for very low frequencies. During study of these signals, noise interference is a major problem and complex. The signals from pressure sensors are processed by using RASPBERRY Pi ARM11J6JZF micro controller. The processing unit consists of Amplifier with LM224, ADC and a comparator circuit for processing the signals from the sensor. The signal-conditioning unit consists of the following parts explained below. 6.6.2.1. Filter The amplifier receives the signal obtained from the previous stage and it is used to provide high gain, in order to adapt the signal to the later stage (A/D converter) to full scale. It also includes a zero adjustment. The signal is handled as a D.C. signal [34]. In the present design we are using LM224 used as an amplifier for amplifying the pressure sensor signal and the output of the amplifier is given to the Analog to Digital converter. The LM224 is a Single Supply, low–cost, quad operational amplifiers with true differential inputs. They have several distinct advantages over standard operational amplifier types in single supply applications. The quad amplifier can operate at supply voltages as low as 3.0 V or as high as 32 V. A simple interface diagram of LM224 is as shown in fig6.9. 150k 3.3V 5v 11 R23 1M Vo 0.33uf 4 Input from BP sensor 1 + 3 LM224 - 2 C27 R22 1k C28 33uf Fig 6.9: Lm224 signal amplifier 254 The LM224 is made using four internally compensated, two–stage operational amplifiers. The first stage of each consists of differential input transistors with input buffer transistors and the differential to single ended converter. The first stage performs not only the first stage gain function but also performs the level shifting and transconductance reduction functions. By reducing the transconductance, a smaller compensation capacitor (only 5.0 pF) can be employed. The Tranconductance reduction is accomplished by splitting the collectors of transistors. Another feature of this input stage is that the input common mode range can include the negative supply or ground, in single supply operation, without saturating either the input devices or the differential to single–ended converter. The second stage consists of a standard current source load amplifier stage. The pressure sensor unit interface with operational amplifier LM224 is as show in fig 6.10. The output of the opamp is applied to the analog to digital converter for further processing. ADC1 ADC2 3.3V C24 3.3V U8 33.3.V_PRESS U7 2 Vout N/C8 R7 N/C5 N/C7 GND N/C1 N/C6 2 R10 8 3 OUT4 R8 6 4 R9 5 6 C22 7 R11 14 OUT1 IN1- IN4- IN1+ 7 3 5 1 Vs MPXV5050GP 1 4 IN4+ LM224 VCC GND IN2+ IN2- IN3+ IN3- OUT2 C20 OUT3 13 12 11 10 9 8 C19 C23 Fig 6.10: operational amplifier interfacing circuit The pressure sensor is connected directly to the cuff, which is inflated or deflated via a motor and valve. The output of the pressure sensor is split into two signals. The PCF8591 is a single-chip analog to digital converter with four analog inputs and a serial I2C-bus interface. Both signals are input to the serial PCF8591 ADC. The first signal is input directly into the microcontroller without any amplification because the MPX5050GP pressure sensor outputs between .2V and 4.7V, which is acceptable for the micro controller’s through ADC. This signal contains both the cuff pressure signal and the oscillation signal. The second signal is 255 input through a two-pole high-pass filter to block the cuff pressure signal and amplify the oscillation signal. It is assumed that the oscillation signal is around 1Hz (corresponding to 60 heartbeats per minute) and the cuff pressure signal is less than. 04Hz. These frequencies are important when designing the high-pass filter. 6.6.2.2. Analog to Digital Converter PCF8591 The PCF8591 [35] is a single-chip with four analog inputs, one analog output and a serial I2C-bus interface. Three address pins A0, A1 and A2 are used for programming the hardware address, allowing the use of up to eight devices connected to the I2C-bus without additional hardware. Address, control and data to and from the device are transferred serially via the two-line bidirectional I2C-bus. The functions of the device include analog input multiplexing, on-chip track and hold function, 8-bit analog-to-digital conversion and an 8-bit digital-to-analog conversion. The functional block diagram of analog to digital converter is as shown in figure 6.11. Figure 6.11. : Block diagram of ADC PCF8591 The A/D converter uses the successive approximation conversion technique. The on-chip D/A converter and a high-gain comparator are used temporarily during an A/D conversion cycle. The I2C-bus is for bidirectional, two-line communication between different ICs or modules. The two lines are a Serial Data line (SDA) and a Serial Clock line (SCL). Both lines must be connected to a positive supply via a pullup resistor. An I2C-bus is activated by sending a address to the PCF8591 device. The address consists of address pins A0, A1 and A2. The address is always sent as the first byte after the start condition in the I2C-bus protocol. The last bit of the address byte is the read/write-bit which sets the direction of the data transfer. A/D conversion cycle 256 is started after sending read mode address to a PCF8591 device. The A/D conversion cycle is triggered at the trailing edge of the acknowledge clock pulse. Once a conversion cycle is triggered, an input voltage sample of the selected channel is stored on the chip and is converted to the corresponding 8-bit binary code. The conversion result is stored in the ADC data register and awaits transmission. The first byte transmitted in a read cycle contains the conversion result code of the previous read cycle. An on-chip oscillator generates the clock signal required for the A/D conversion cycle. The sensor used can measure up to 377 mmHg; the gain of the amplifier was adjusted so that 1 mmHg coincides with each one of the possible values of the converter. The value obtained from A/D converter in binary code is applied to the micro controller. 6.6.3. Central Processing Unit ARM11J6JZF The signals from analog digital converter are processed by using RASPBERRY Pi ARM11J6JZF micro controller. ARM stands for Advanced RISC Machine. The ARM11 is based on the ARMv6 instruction set architecture. The block diagram of the internal architecture of the micro controller ARM11J6JZF is shown in fig 6.12. The Raspberry Pi uses the Broadcom BCM2835 system on a chip (SoC). The Raspberry Pi model B has 512MB of primary memory (RAM). Clock speed is 700MHz. The Broadcom BCM2835 is the specific implementation of an ARM11 processor. The CPU core is the ARM11J6JZF-S which is a member of the ARM11 family (ARMv6 architecture with floating point). The GPU is a Videocore IV GPU. This is mainly consists of the following units embedded inside the chip the important features of the ARM11J6JZF-S core is of the following Eight stage pipeline Internal coprocessors CP14 and CP15 Three instructions sets 32-bit ARM instruction set (ARM state) 16-bit Thumb instruction set (Thumb state) 8-bit Java bytecodes (Jazelle state) Data path consist of three pipelines: ALU, Shift, Sat pipeline (Sat implements saturation logic) 257 MAC pipeline (MAC executes multiply and multiply-accumulate operations) Load or store pipeline The ARM Memory Management Unit (MMU) translates virtual addresses to physical addresses using page information. The MMU supports four page sizes: 4KB small pages, 64KB large pages, 1MB sections and 16MB super sections. Address mapping is performed using two levels of translation look aside buffers: the Main TLB and two micro TLBs. The Main TLB backs separate micro TLBs for each of the instruction and data caches. Address translation is first attempted in a MicroTLB. If the address cannot be translated in the MicroTLB, then the Main TLB is tried. If the address cannot be translated through the Main TLB, then hardware page walking is invoked. The functional block diagram of the ARM11J6JZf is as shown in fig 6.12. Figure 6.12: Blocks Diagram of the ARM11J6JZF The circuit diagram of interfacing motor, filter, memory...Etc to a micro controller is as shown in fig 6.8. In the present design ARM11J6JZF is the central processing unit do the total processing. The micro controller is connected to all external devices like motor’s , filter, amplifier, ADC, USB, Graphical LCD. Every external device has their own input/ output lines. The motors, sensor output are connected to the GPIO pins of the micro controller. LCD communicates serially with the micro controller. 5 lines are used to interface with the micro controller. Universal Serial Bus uses Differential lines to communicate between micro controller and RASPBERRY Pi. 258 6.6.4. Motor control unit The motor control design is very crucial in this design, where we needed to on and off the motor at a correct time using micro controller ARM11J6JZF. The motor unit work with a Complementary power Darlington transistor MJD122T4, it is integrated anti parallel Collector-emitter diode and it is a form of complementary NPN - PNP pair. In this design MJD122T4 used as a switch to control a motor. The system first turns on the motor and pump the air in to wrist cuff to maximum range. This can be determined by the pressure sensor, and the motor is turned off at some point. Once the cuff is inflated, the motor is stopped and the pressure is slowly decreased by switching on the motor 2 to open the valve.. At this time, the micro controller processes the oscillation signal and records the pressure from the cuff pressure signal. The cuff is inflated and deflated using motors. The motor control unit with micro controller is as shown in fig 6.13. Fig 6.13: Interfacing of Motor Control unit With Micro controller 6.6.5. GRAPHICAL LCD DISPLAY (TOUCH SCREEN - AT070TN92 The output of the device is sent to a liquid crystal display to display the data of systolic and diastolic blood pressure. In present design we are using GRAPHICAL LCD DISPLAY TOUCH SCREEN - AT070TN92 [36]. The pin description and the specification of AT070TN92 are as shown in table 2 and 3. The Graphical LCD interfacing circuit is as shown in fig 6.17. AT070TN92 is 800x480 dots 7" color TFT LCD module display with OTA7001A controller, optional 5 points capacitive multi-touch panel with connector and 4-wire resistive touch panel screen with connector. A thin-film-transistor liquid-crystal 259 display (TFT LCD) is a variant of a liquid-crystal display (LCD) that uses thin-film transistor (TFT) technology to improve image qualities such as addressability and contrast. A TFT LCD is an active-matrix LCD, in contrast to passive-matrix LCDs or simple, direct-driven LCDs with a few segments. It has superior display quality, super wide view angle and easily controlled by MCU ARM. It can be used in any embedded systems, car, mp4, gps, industrial device, security and hand-held equipment which require display in high quality and colorful image. It supports RGB interface. FPC with zif connector is easily to assemble or remove. The detailed explanation for the touch screen given in the earlier chapters. The photograph of Graphical LCD display is as shown ing fig 6.17. Figure 6.17: AT070TN92 - 7" color TFT LCD display with OTA7001A 6.6.6. Universal Serial Bus- USB The LDO Regulator generates the 3.3V reference voltage for driving the USB transceiver cell output buffers. The main function of this block is to power the USB Transceiver and the Reset Generator Cells rather than to power external logic. The USB Transceiver Cell provides the USB 1.1 / USB 2.0 full-speed physical interface to the USB cable. The output drivers provide 3.3V level slew rate control signaling, whilst a differential receiver and two single ended receivers provide USB data in, SEO and USB reset condition detection. The USB DPLL cell locks on to the incoming NRZI USB data and provides separate recovered clock and data signals to the SIE block. The Serial Interface Engine (SIE) block performs the Parallel to Serial 260 and Serial to Parallel conversion of the USB data. In accordance to the USB 2.0 specification, it performs bit stuffing / un-stuffing and CRC5 / CRC16 generation / checking on the USB data stream. The USB Protocol Engine manages the data stream from the device USB control endpoint. It handles the low level USB protocol requests generated by the USB host controller and the commands for controlling the functional parameters of the UART. Data from the USB data out endpoint is stored in the FIFO TX buffer and removed from the buffer to the UART transmit register under control of the UART FIFO controller. Data from the UART receive register is stored in the FIFO RX buffer prior to being removed by the SIE on a USB request for data from the device data in endpoint. The UART FIFO controller handles the transfer of data between the FIFO RX and TX buffers and the UART transmit and receive registers. Together with the UART FIFO Controller the UART Controller handles the transfer of data between the FIFO RX and FIFO TX buffers and the UART transmit and receive registers. It performs a synchronous 7 / 8 bit Parallel to Serial and Serial to Parallel conversion of the data on the RS232 (RS422 and RS485) interface. Control signals supported by UART mode include RTS, CTS, DSR, DTR, DCD and RI. The UART Controller also provides a transmitter enable control signal pin option (TXDEN) to assist with interfacing to RS485 transceivers. RTS / CTS, DSR / DTR and X-On / X-Off handshaking options are also supported. Handshaking, where required, is handled in hardware to ensure fast response times. The UART also supports the RS232 BREAK setting and detection conditions. A new feature, programmable in the internal EEPROM allows the UART signals to each are individually inverted. Another new EEPROM programmable feature allows high signal drive strength to be enabled on the UART interface and CBUS pins. 6.6.7. GSM MODEM - SIM500 The Global System [37] for Mobile communications (GSM: originally from Groupe Spécial Mobile) is the most popular standard for mobile phones in the world. A GSM modem is a specialized type of modem which accepts a SIM card, and operates over a subscription to a mobile operator, just like a mobile phone. From the mobile operator perspective, a GSM modem looks just like a mobile phone. A GSM modem can be a dedicated modem device with a serial, USB or Bluetooth connection, or it may be a mobile phone that provides GSM modem capabilities. The term GSM 261 modem is used as a generic term to refer to any modem that supports one or more of the protocols in the GSM evolutionary family, including the 2.5G technologies GPRS and EDGE, as well as the 3G technologies WCDMA, UMTS, HSDPA and HSUPA. GSM module is the kernel part to realize wireless data transmission. Wireless communication module SIM500 based on standard of GSM produced by SIMCOM company is used in the developed application. SIM500 module consists of main frame, antenna, serial communication line, power line. It provides services of wireless modem, wireless fax, short message and speech communication. The short message service is suitable to apply in the situation of frequent transmittance of small data flow. SIM500 is a Tri-band GSM/GPRS engine that works on frequencies EGSM 900 MHz, DCS 1800 MHz and PCS1900 MHz. With a tiny configuration of 40mm x 33mm x 2.85 mm, SIM500 can fit almost all the space requirement in your application, such as Smart phone, PDA phone and other mobile device. The physical interface to the mobile application is made through a 60 pins board-to-board connector, which provides all hardware interfaces between the module and customers’ boards except the RF antenna interface. The keypad and SPI LCD interface will give you the flexibility to develop customized applications. Two serial ports can help you easily develop your applications. Two audio channels include two microphones inputs and two speaker outputs. This can be easily configured by AT command. SIM500 provide RF antenna interface with two alternatives: antenna connector and antenna pad. The antenna connector is MURATA MM9329-2700. And customer’s antenna can be soldered to the antenna pad. The circuit of SIM500 is shown in Figure 6.18. 262 Figure 6.18 SIM500 Circuit The SIM500 is designed with power saving technique, the current consumption to as low as 2.5mA in SLEEP mode. The SIM500 is integrated with the TCP/IP protocol, Extended TCP/IP AT commands are developed for customers to use the TCP/IP protocol easily, which is very useful for those data transfer applications. The leading features of SIM 300 make it ideal for virtually unlimited applications, handheld devices and much more. It is compatible with AT cellular command interface. The features of SIM500 are Tri-Band GSM/GPRS 900/1800/1900 MHZ Complaint to GSM phase 2/2+ Dimensions: 40mm x 33mm x 2.85mm Weight : 8g Control via AT commands SIM application tool kit Supply voltage range 3.4 …. 4.5v Low power consumption All hardware interfaces except RF interface that connects SIM500 to the customers’ cellular application platform is through a 60-pin 0.5mm pitch board-toboard connector. Sub-interfaces included in this board-to-board connector are Dua,l serial interface ,Two analog audio interfaces, SIM interface SIM500 provides two unbalanced asynchronous serial ports. The GSM module [38] is designed as a DCE (Data Communication Equipment), following the traditional DCE-DTE (Data Terminal Equipment) connection, the module and the client (DTE) are connected through the following signal as shown in figure 6.19. Auto bauding supports baud rate from 1200 bps to 115200bps. Serial port 1 Port/TXD @ Client sends data to the RXD signal line of module Port/RXD @ Client receives data from the TXD signal line of module Serial port 2 Port/TXD @ Client sends data to the DGBRXD signal line of module 263 Port/RXD @ Client receives data from the DGBTXD signal line of module Figure 6.19 : Interface of serial ports The TXD, RXD, DBG_TXD, DBG_RXD, GND must be connected to the IO connector when user need to upgrade software and debug software, the TXD, RXD should be used for software upgrade and the DBG_TXD, DBG_RXD for software debug. The PWRKEY pin is recommended to connect to the IO connector. The user also can add a switch between the PWRKEY and the GND. The PWRKEY should be connected to the GND when SIM500 is upgrading software. The SIM interface supports the functionality of the GSM Phase 1 specification and also supports the functionality of the new GSM Phase 2+ specification for FAST 64 kbps SIM. Both 1.8V and 3.0V SIM Cards are supported. The SIM interface is powered from an internal regulator in the module having nominal voltage 2.8V. All pins reset as outputs driving low. The Figure 6.20 is the reference circuit about SIM interface. The 22Ω resistors showed in the figure should be added in series on the IO line between the module and the SIM card for matching the impedance. The pull up resistor (about 10KΩ) must be added on the SIM_I/O line. The SIM_PRESENCE pin is used for detecting the SIM card removal. We can use the AT command “AT+CSDT” to set the SIMCARD configure. We can select the 8 pins SIM card. 264 Figure 6.20:SIM interface reference circuit with 8 pins SIM card The GSM 07.05 AT commands are for performing SMS and CBS related operations. The Overview of AT Commands According to GSM07 [39] is listed in Table 3. Table: 3 . Overview of AT Commands According to GSM07 6.6.8. Power supply In present design the BP meter operates on 3.3V, 5V and 12V power supply where, the motor control unit and Display uses 12V. RS-232 uses 5V power supply and the remaining parts of the design used 3.3 V. The circuit diagram of the power supply is given below. All these voltages are derived from 9v Battery package. 5V ,12v and 3.3 V are as shown in fig 6.21, 6.22, 6.23 respectively. 7805 5v Vin 3 Vout 2 1 Gnd 9v C26 10uf C18 10uf C27 47uf Fig 6.21: 5 v Power supply circuit D3 MBR120LSFT1 9v LM2621MM L1 7 VDD R6 510 ohms 6 EN FREQ C14 68uf 200k R3 C15 0.1uf 3 PGND 5 1 FB 2 ENABLE +12v BOOT SGND C10 22uf SW 4 8 6.o uH R4 150k R5 18k C13 33pf Fig 6.22: 12-v Power supply circuit 265 Fig 6.23: 3.3-v Power supply circuit 6.7 Software development of Blood pressure meter The software part in the present design is used to determine the blood pressure values. The micro controller program controls the external devices and measures the input signals from the patient and displays the output. 6.7.1. Algorithm 1. Initialize central processing unit 2. Initialize Ports, LCD, Operational Amplifiers 3. Initialize LCD, memory 4. Initialize ADC sampling rate using timer 5. Enable interrupts 6. Start the motor 7. Read the signals from the sensor and transmit signals to the amplifier 8. Convert analog signal to digital signal using inbuilt ADC 9.Calculate systolic and diastolic pressure 10. Display the signals on GLCD 11. Store systolic and Diastolic pressure values in memory 266 6.7.2. Flowchart Main Start Initialization Initialize memory & GLCD Start measurement of Blood Pressure Inflating Cuff Memory Motor Memory ( ) Motor ( ) Set ADC sampling rate with Timer Write/ read data in memory Control motor speeds Release Air Read input signal & Calculate systolic and diastolic pressure Display Blood pressure Return Return GLCD Set_LCD ( ) Store BP values in Memory Display BP values, and transmit to personal computer End Set common and segment lines Return Figure 6.24 : Flowchart of GSM BP Measurement System 267 In present study the c language used for the development of Blood pressure meter. The ‘C’ programming language is growing in importance and has become the standard high-level language for real-time embedded applications. The PC is the standard computing device for the ‘C’ compiler. [40]. To development of C programs for an ARM11J6JZF executing on a PC is embedded linux and its GUI design developed is QT. This largely due to the inherent language flexibility, the extent of support and its potential for portability across a wide range of hardware [37]. The developed software program for the BP meter is given in Annexure I. 6.7.3. EMBEDDED LINUX - QT Programming In the present work the software development for the development of Blood pressure meter was developed using the software of embedded linux and its GUI design developed is QT. Linux itself is a kernel, but ‘Linux’ in day to day terms rarely means so. Embedded Linux generally refers to a complete Linux distribution targeted at embedded devices. There is no Linux kernel specifically targeted at embedded devices, the same Linux kernel source code can be built for a wide range of devices, workstations, embedded systems, and desktops though it allows the configuration of a variety of optional features in the kernel itself. In the embedded development context, there can be an embedded Linux system which uses the Linux kernel and other software or an embedded Linux distribution which is a pre-packaged set of applications meant for embedded systems and is accompanied by development tools to build the system. The Qt framework first became publicly available in May 1995. It was initially developed by Harvard Nord (Troll tech's CEO) and Eirik Chambe-Eng (Trolltech's Chief Troll). Qt has long been available to non-C++ programmers through the availability of unofficial language bindings, in particular Py.Qt for Python programmers. In 2007, the Qyoto unofficial bindings were released for C# programmers. In 2007, Troll tech launched Qt Jambi, an officially supported Java version of the Qt API. Since Troll tech's birth, Qt's popularity has grown unabated and continues to grow to this day. This success is a reflection both of the quality of Qt and of how enjoyable it is to use. In the past decade, Qt has gone from being a product used by a select few "inthe know" to one that is 268 used daily by thousands of customers and tens of thousands of open source developers all around the World. The signals and slots mechanism is fundamental to Qt programming. It enables the application programmer to bind objects together without the objects knowing anything about each other. We have already connected some signals and slots together, declared our own signals and slots, implemented our own slots, and emitted our own signals. Let's take a moment to look at the mechanism more closely. Slots are almost identical to ordinary C++ member functions. They can be virtual; they can be overloaded; they can be public, protected, or private; they can be directly invoked like any other C++ member functions; and their parameters can be of any types. The difference is that a slot can also be connected to a signal, in which case it is automatically called each time the signal is emitted. Qt provides a complete set of built-in widgets and common dialogs that cater to most situations. we present screenshots of almost all of them. A few specialized widgets are deferred. Main window widgets such as Q MenuBar, Q ToolBar and Q StatusBar and layout-related widgets such asQ Splitter and Q ScrollArea. In thescreenshots shown in figure, all the widgets are shown using the Plastique style. A widget is a user interface component such as a button or a scroll-bar are Reusable,Well defined interface ,Uses C++ inheritance, All widgets derive from a common base, Widgets may contain other widgets, Custom widgets can be created from existing widgets or they can be created from scratch QT DESIGNER Written using Qt so it is available on all platforms where Qt is available Used to speed design of Qt applications Supports all Qt widgets and can be used to incorporate custom widgets FEATURES Fully object-oriented Consistent interfaces 269 Rich set of widgets (controls) – Have native look and feel – Drag and drop Customizable appearance Fig 6.25 : QT designer Utility classes OpenGL support Network support Database support Plugin support Unicode/Internationalization support GUI builder Based on the above advantages, we used the Qt software for the present work. The algorithm and flow chart of the touch screen based electronic voting machine as shown below. After creation of project and the program, we executed the program. Then executed program is downloaded in to the micro controller. The download program is executed in micro controller with external hardware interface then we can get the results. If we get wrong results then modify the program and do the same process as above till to 270 get the correct results. Software program for Blood pressure measurement is present in Annexure –I 6.8. Operation of Blood Pressure Measurement system The circuit diagram of interfacing motor, filter, memory..Etc to a micro controller is as shown in fig 6.9. The micro controller must first turn on the motor and pump the air into arm cuff to approximately 160mmHg. Then the pressure sensor can determine the pressure, and the motor is turned off at this point. A threshold level must be set in the software to differentiate between true pulses in the pressure and premature pulses. This is set to 1.75V. Once the cuff is inflated to 160mmHg, the motor is stopped and the pressure is slowly decreased. At this time, the micro controller Raspberry Pi processes the oscillation signal and records the systolic pressure taken from the cuff pressure signal when the oscillation signal first exceeds the threshold voltage. Further decreasing the pressure, the last pulse above the threshold before there are no more pulses for 450ms is considered the diastolic pressure. This requires the use of memory and processing previous measurements. Once the systolic and diastolic pressures are determined, the cuff is fully deflated. The pressure signals are measured by using analog to digital converter and display the results in the Graphical LCD display. The measured values are stored in the memory and transmit to the RASPBERRY Pi for further analysis to download the measurement on to Neonatal monitoring system. 6.9. Calibration and Analysis Instrumentation system employed for the measurement of physicochemical or biological parameters needs systematic calibration. The calibration is utmost important for the measuring instruments. The calibration process involves study of influence of various kinds of parameters on the final measurement systems. Especially in bio-medical instrumentation it is very important, because most of the instruments may be used as life saving instruments. Malfunctioning and bad calibration of the system leads to wrong diagnosis leading to catastrophic results. Hence the calibration regarding to life saving instruments need vast studies and precautions. The present 271 work on blood pressure meter is based on noninvasive instrumentation principle. The measurement of systolic and diastolic pressure is obtained by oscillometric method. The blood pressure measurement by noninvasive methods encounters problems from cuff leakage, movement of measurement, cuff size etc. hence the calibration processor is more complex involving number of volunteers for the measurements of blood pressure. As large number of data being collected before arriving conclusion on the response of blood pressure measurement. The steps for the measurement of the system are as follows in the following photos. The neonatal monitoring system for NIBP is as shown in potograph1. Photograph 1: Neonatal Monitoring system for NIBP When we start the monitoring, the main window of the GSM based Neonatal Intensive Care Monitoring system consists of the following menu for selection. The main window is as shown in photographs. They are 1. Temperature 2. Phototherapy 3. Pulse oxygen(SPO2) and pulse rate 4. NIBP 5. Total system and 6. Exit 272 Photograph 2: Main Window of Neonatal Monitoring system for NIBP When NIBP button touched on the main window display screen , the Blood pressure measurement of neonates process will start and display the window related to the BP parameter . The GSM based blood pressure measurement system photograph is as shown in photograph 3 with the values of systolic, Diastolic in mm/Hg and pulse rate in number of beats per minute of the heart. The close button will close the process of BP measurement. Photograph 3: NIBP measurement window 273 The NIBP measurement window shows the current record of the neonate stored in the memory of the Sony SD memory card. The record consists of the systolic, Diastolic and pulse rate of the patient as a real time measurement with date and time for further analysis. The measurement records are shown in photograph 4. Photograph 4: NIBP measurement records window The measurements for different Neonates are with accuracy by +1%. The measurements are carried out with the present designed instrument and with standard blood pressure meter of OMRON make. The measurements were carried out on the system is good agreement with values measured with standard meter. The empirical calibration process, the measurements exhibited slight deviation, but all these measurements are within the tolerance range. The response time of the instrument was also equal with standard meter. As the system is compact it can be used at ambulance services also. The measured values are present in table 4. 274 Table 4: Measurement of BP values Actual Blood Pressure with OMRON pressure Present designed S. No Sphygmomanometer mmHg meter (mmHg) Blood pressure meter mmHg) 1 137/92 136/91 137/92 2 147/95 148/96 146/95 3 136/89 134/88 136/89 4 126/83 127/83 126/82 5 122/81 121/80 122/81 6.10 Results & discussion The main aim and objective of this work is to develop a GSM based Neonatal Intensive Care Monitoring system with Temperature, Phototherapy, Blood Pressure and Pulse Oximetry measurement. Hence an attempt has been made by the author to develop a Blood Pressure meter using the advanced micro controller ARM11J6JZF. The instrument is a handheld, rugged, low cost, wearable device and also it is cost effective compared to other meters operated with minimum power consumption by the device. 275