Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
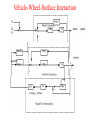
Vehicle Dynamics under Longitudinal Forces ME5670 Lecture 5 http://scholar.lib.vt.edu/theses/available/etd-5440202339731121/unrestricted/CHAP3_DOC.pdf http://scholar.lib.vt.edu/theses/available/etd-5440202339731121/ Class timing Monday: 2:30 PM – 4:00 PM Thursday: 4:00PM – 5:30 PM Date: 22/01/2015 Force and Moment Balance Equations Vehicle There are two state variables: 1. Translation velocity: V 2. Wheel rotational velocity: 𝜔𝑤 Two dynamic equations are a) Vehicle motion: b) Wheel motion: Wheel Tire Tractive (Braking) Force Tractive (braking ) force is given by Some interesting phenomena related with tire-ground dynamics under acceleration and deceleration effects: 1. Applying a driving torque or a braking torque to a pneumatic tire produces tractive (braking) force at the tire-ground contact patch. 2. The driving torque produces compression at the tire tread in front of and within the contact patch. Consequently, the tire travels a shorter distance than it would if it were free rolling. 3. When a braking torque is applied, it produces tension at the tire tread within the contact patch and at the front. Because of this tension, the tire travels a larger distance than it would if it were free rolling. This phenomenon is referred as the wheel slip or deformation slip. 4. The adhesion coefficient, 𝜇(𝜆), which is the ratio between the tractive (braking) force and the normal load, depends on the road-tire conditions and the value of the wheel slip, 𝜆. Concept of Wheel Slip A typical 𝜇 𝜆 vs 𝜆 graph is given by 𝜇 𝜆 vs 𝜆 curve for different road conditions Wheel slip is defined as or State Equations of Combined System , 1. Define convenient state variables: and 2. State equations: where, , , , 3. For deceleration: , , , Wheel slip evolution: This equation is nonlinear and involves uncertainties in its parameters due to the following reason: a) Nonlinear relationship of wheel slip and velocity b) Nonlinear 𝜇 𝜆 vs 𝜆 relationship and depends on road surface . c) Nonlinear 𝑓1 and 𝑓2 are nonlinear d) 𝑁𝑣 (Normal tire force) changes based on steering and suspension e) Moment of inertia and wind drag force change with time and wind condition Vehicle-Wheel-Surface Interaction Local Stability Concept 1. Local stability: The local stability of a nonlinear system can be studied by linearizing the system around its equilibrium point. 2. For a given differential equation of the form 3. Equilibrium point is given by 4. Linearized equation is given by where, 4. For the unforced state, i.e., u(t)=0 , the equation is given by The equilibrium equation 𝑥0 is stable if the eigenvalues of 𝐷𝑓 𝑥0 have strictly negative real parts. It is unstable if the eigenvalue of 𝐷𝑓 𝑥0 has positive real part. Stability of Vehicle Dynamic Equation 1. Two state equations are 2. Jacobian matrix at the equilibrium (𝑥10 , 𝑥20 ) is given by 𝐴= 𝜕 𝑥10 , 𝑥20 𝜕 𝑥10 , 𝑥20 3. Real part of the eigenvalues of the A matrix are All the values of a) When b) When is positive, the eigen values of A have negative real parts. is negative, the eigen values of A have positive real parts for under which the system is unstable. Practice Problem Problems based on the chapter 2 and 3 of the reference book titled “Motor Vehicle Dynamics by Giancarlo Genta” (You may use the below mentioned link for Chapter 2, however, full version of chapter 3 can be found from the library) http://books.google.co.in/books?id=yAo-6yQbg9IC&printsec=frontcover&source=gbs_ge_summary_r&cad=0#v=onepage&q&f=false 1. Based on the tire-surface interaction, classify different types of forces and moments acting on the tire. 2. Draw the distribution of normal and tangential forces over the contact regions of tire-surface. Discuss the variation of normal forces vs vertical deflection of tire for radial and bias-ply tire. Finally, also draw the variation of longitudinal force vs deflection, and aligning torque vs rotation. 3. Define the loaded, unloaded and effecting wheel radius with reference to the translational and angular velocity of rolling wheel. 4. Define the concept of rolling resistance and write its form in terms of rolling resistance coefficients and normal force. 5. After mentioning the effect of at least four different factors on rolling coefficients, describe the influence of speed on the rolling coefficients and mention its linear as well as nonlinear form. Practice Problem 6. Define the critical speed of tire and mention its influencing factors. 7. Discuss the tractive and braking forces under rolling condition. Also draw the appropriate curve to describe its variation with slip ratio. 8. Using the magic formula, write the expression of longitudinal forces in terms of slip ratio and also draw its variation for a vertical load of 2, 5, 7, 8 kN. 9. a) Define the cornering force and clearly show the rolling velocity along with the side slip effects. b) After drawing the variation of side force and aligning torque with the slip angle for radial and bias-ply tires, mention the expression of side force and aligning torque interms of slip angle. c) Also, write the expression of side force and aligning torque based on magic formula. 10. Explain the interaction of longitudinal and lateral forces and write the elliptic approximation of the relationship between these two forces for constant slip angle. 11. Describe and write the expression of the aerodynamic drag forces and moments due to vehicle motion.