Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Chemistry 431
Lecture 13
Group Theory
Symmetry Operations
Properties of a Group
Point Groups
Reducible Representations
NC State University
Definition of a Symmetry Operation
Symmetry operation: an operation that moves a molecule
into a new orientation that appears equivalent to the
original one.
Example: rotation by 2π/3
A
C
C
C3
B
B
(In general, Cn is a rotation by 2π/n)
A
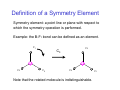
Definition of a Symmetry Element
Symmetry element: a point line or plane with respect to
which the symmetry operation is performed.
Example: the B-F1 bond can be defined as an element.
F1
F3
F3
C3
F2
F2
Note that the rotated molecule is indistinguishable.
F1
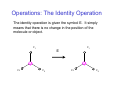
Operations: The Identity Operation
The identity operation is given the symbol E. It simply
means that there is no change in the position of the
molecule or object.
F1
F3
F1
E
F2
F3
F2
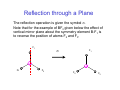
Reflection through a Plane
The reflection operation is given the symbol σ.
Note that for the example of BF3 given below the effect of
vertical mirror plane about the symmetry element B-F1 is
to reverse the position of atoms F2 and F3.
F1
F3
σ
F2
F1
F2
F3
Two Types of Reflection Plane
In this case the reflection is perpendicular to another
possible reflection plane shown in this diagram.
We can define two symmetry planes shown as:
1. The horizontal reflection plane, which has symbol σh.
2. The vertical reflection plane, which has symbol σv.
F1
σv
F3
F2
σh
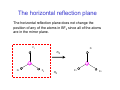
The horizontal reflection plane
The horizontal reflection plane does not change the
position of any of the atoms in BF3 since all of the atoms
are in the mirror plane.
F1
F3
F1
σh
F2
σh
F3
F2
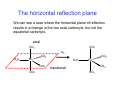
The horizontal reflection plane
We can see a case where the horizontal plane of reflection
results in a change in the two axial carbonyls, but not the
equatorial carbonyls.
axial
CO5
CO1
σh
CO2
O 4C
CO2
Fe
O4C
CO3
CO5
Fe
CO3
equatorial
CO1
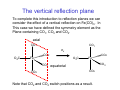
The vertical reflection plane
To complete this introduction to reflection planes we can
consider the effect of a vertical reflection on Fe(CO)5. In
This case we have defined the symmetry element as the
Plane containing CO1, CO3 and CO5.
axial
CO1
CO1
σv
CO2
O4 C
Fe
CO4
O2C
Fe
CO3
CO3 equatorial
CO5
CO5
Note that CO2 and CO4 switch positions as a result.
Rotations in Fe(CO)5
Just as there are two types of reflection plane in Fe(CO)5
We can also define two types of rotation shown below.
C3
axial
CO1
C2
CO2
O4 C
Fe
CO3
CO5
equatorial
Definition of Inversion
Inversion, i involves passing each atom through the center
of the molecule. If an atom has coordinate (x,y,x) then it
has coordinates (-x,-y,-z) after inversion. This only works
if the molecule has a center of symmetry. Fe(CO)5 does
not have a center of symmetry.
CO1
CO2
O4 C
Fe
CO3
No inversion possible!
CO5
Example of Inversion
A molecule such as Mo(CO)6 does have a center of
symmetry and can be inverted as shown below.
CO1
O5C
CO2
i
CO6
O3C
Mo
O4C
Mo
CO3
CO6
CO4
O2C
CO5
CO1
Improper rotation
An improper rotation is a combined rotation followed by
A reflection about a plane perpendicular to the axis of
rotation. It is given the symbol Sn, where n is order of the
rotation.
S4
H3
H1
C
H2
C
C
H4
H1
H4
C
H3
C
C
H2
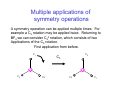
Multiple applications of
symmetry operations
A symmetry operation can be applied multiple times. For
example a C3 rotation may be applied twice. Returning to
BF3 we can consider C32 rotation, which consists of two
Applications of the C3 rotation.
First application from before.
F1
F3
F3
C3
F2
F2
F1
Multiple applications of
symmetry operations
A symmetry operation can be applied multiple times. For
example a C3 rotation may be applied twice. Returning to
BF3 we can consider C32 rotation, which consists of two
Applications of the C3 rotation.
C32 = C3C3
F1
F3
F2
C32
F2
F1
F3
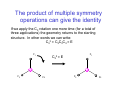
The product of multiple symmetry
operations can give the identity
If we apply the C3 rotation one more time (for a total of
three applications) the geometry returns to the starting
structure. In other words we can write:
C33 = C3C3C3 = E
F1
F3
F1
C33 = E
F2
F3
F2
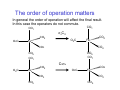
The order of operation matters
In general the order of operation will affect the final result.
In this case the operators do not commute.
CO1
CO1
σvC3
CO2
CO2
O 4C
O 3C
Fe
Fe
CO3
CO4
CO5
CO5
CO1
CO1
CO2
O 4C
Fe
C3σv
CO4
O3C
Fe
CO2
CO3
CO5
CO5
Groups
Properties of a group
1. There must exist an identity operator which commutes
with all other operators.
2. The product of any two operators must also be a
member of the group.
3. Multiplication is associative, but not necessarily
commutative.
4. There must exist an inverse (or reciprocal) for each
element in the group.
Corollaries:
1. The identity operator is its own inverse.
2. A similarity transform is an operation:
Z-1XZ = Y
Point groups
We can assemble the operations of the group into a
multiplication table. This group of operations satisifes
all of the requirements of a mathematical group and is
called a point group. Point groups get their name from the
fact that at least one point in space remains unchanged
for all operations in the group.
C1 is a point group whose only symmetry operation is E,
the identity. In other words there is no symmetry.
Cs is a point group whose symmetry operations are E and
σ. The symmetry is restricted to a mirror plane.
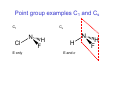
Point group examples C1 and Cs
We can assemble the operations of the group into a
multiplication table. This group of operations satisifes
all of the requirements of a mathematical group and is
called a point group. Point groups get their name from the
fact that at least one point in space remains unchanged
for all operations in the group.
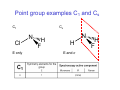
C1 is a point group whose only symmetry operation is E,
the identity. In other words there is no symmetry.
Cs is a point group whose symmetry operations are E and
σ. The symmetry is restricted to a mirror plane.
Point group examples C1 and Cs
C1
Cs
N
Cl
E only
H
F
N
H
E and σ
H
F
Point group examples C1 and Cs
C1
Cs
N
Cl
E only
H
F
N
H
E and σ
H
F
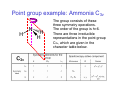
Point group example: Ammonia C3v
N
H
H
H
The symmetry operation E
exists for all groups.
Point group example: Ammonia C3v
N
H
H
H
A vertical reflection plane
σv is shown. There are three
such planes in molecules
in the C3v point group.
Point group example: Ammonia C3v
N
H
H
H
There are two possible
Rotations about a 3-fold
axis. The first is a 120o
rotation and the second is
a 240o rotation.
Point group example: Ammonia C3v
N
H
H
H
The group consists of these
three symmetry operations.
The order of the group is h=6.
There are three irreducible
representations in the point group
C3v, which are given in the
character table below.
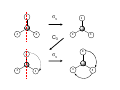
Similarity Transform
The operations X and Y are said to be conjugate if they
are related by a similarity transform Z-1XZ = Y where Z
is at least one member of the group.
A class is a complete set of operations that are conjugate
to each other.
For example, in the point group C3v one can show that
The operations C3 and C32 are in the same class.
We note that (σv)-1 = σv
(σv)-1 C3 σv = σv C3 σv = σv σv”= C32
σv
1
3
2
2
1
3
2
σv
2
3
C3
1
1
3
Point Groups
C1 : no symmetry
Cs : only a plane of symmetry
Ck : only a k rotational axis
Ci : only an inversion center
Ckh : a k rotational axis and σh
Ckv : a k rotational axis and k σv
Dk : only Ck and k C2 rotational axes
Dkh : operations of Dk and σh which implies k σv
Dkd : operations of Dk and k σd which bisect the angles of C2
Sk : only the improper rotation Sk
Td : tetrahedral
Oh : octahedral
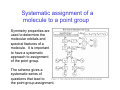
Systematic assignment of a
molecule to a point group
Symmetry properties are
used to determine the
molecular orbitals and
spectral features of a
molecule. It is important
to have a systematic
approach to assignment
of the point group.
The scheme gives a
systematic series of
questions that lead to
the point group assignment.
Examples of point group assignment
Determining the point group to which a molecule
belongs will be the first step in a treatment of the
molecular orbitals or spectra of a compound.
It is important that this be done somewhat
systematically. The flow chart in the figure is offered
as an aid, and a few examples should clarify the
process.
What are the point groups for the following Pt(II) ions?
Cl
Pt
Cl
Cl 2-
Cl
Cl
Pt
Cl
A
Pt
Cl
Br
Cl 2-
Cl
Cl
Pt
Cl
B
Pt
Br
Br
Br 2-
Cl
Pt
Cl
C
Cl
What are the point groups for the following Pt(II) ions?
Cl
Cl Cl 2Cl
Cl Cl 2Cl
Cl Br 2Pt
Cl
Pt
Cl
Pt
Cl
Br
Pt
Cl
Pt
Br
Br
Pt
Cl
Cl
C
B
A
A contains three C2 axes, i.e., [Ck?] is yes with k=2. It contains
a plane of symmetry so [σ?] is yes. The three C2 axes are
perpendicular, i.e, there is a C2 axis and two perpendicular C2's
which means that [⊥C2?] is yes. There is a plane of symmetry
perpendicular to the C2 so [σh?] is yes and we arrive at the D2h
point group.
What are the point groups for the following Pt(II) ions?
Cl
Cl Cl 2Cl
Cl Cl 2Cl
Cl Br 2Pt
Cl
Pt
Cl
Pt
Cl
Br
Pt
Cl
Pt
Br
Br
Pt
Cl
Cl
C
B
A
B contains only one C2 axis, no ⊥C2's, no σh, but it does have
two σv's and is therefore a C2v ion.
What are the point groups for the following Pt(II) ions?
Cl
Cl Cl 2Cl
Cl Cl 2Cl
Cl Br 2Pt
Cl
Pt
Cl
Pt
Cl
Br
Pt
Cl
Pt
Br
Br
Pt
Cl
Cl
C
B
A
C contains a single C2 axis and a horizontal plane (the plane of
the ion) and therefore has C2h symmetry.
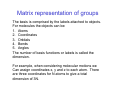
Matrix representation of groups
The basis is comprised by the labels attached to objects.
For molecules the objects can be:
1. Atoms
2. Coordinates
3. Orbitals
4. Bonds
5. Angles
The number of basis functions or labels is called the
dimension.
For example, when considering molecular motions we
Can assign coordinates x, y and z to each atom. There
are three coordinates for N atoms to give a total
dimension of 3N.
z1
O
z2
H y2
x2
y1
x1
z3
H y3
x3
C2(z)
z1
x1
y1 O
x3 z3
y3 H
z2
x2
y2 H
C2(z) gives (xi→ -xj), (yi→ -yj), and (zi→ +zj) where i = j
for O coordinates since the O lies along C2 but i ≠ j for
the H since they do not lie along C2 and are therefore
rotated into one another, e.g., x2 → -x3.
We can represent this transformation in matrix notation
where each atom will have a 3x3 matrix,
⎛ xi ⎞ ⎛ −1 0 0 ⎞ ⎛ x j ⎞ ⎛ −x j ⎞
⎟
⎜ ⎟ ⎜
⎟⎜ ⎟ ⎜
⎜ yi ⎟ = ⎜ 0 −1 0 ⎟ ⎜ y j ⎟ = ⎜ −y j ⎟
⎟⎟
⎜ ⎟ ⎜
⎟ ⎜⎜ ⎟⎟ ⎜⎜
⎝ zi ⎠ ⎝ 0 0 +1⎠ ⎝ zj ⎠ ⎝ + zj ⎠
(3r x 3c)(3r x 1c)
gives a (3r x 1c)
The trace of the matrix is the sum of the diagonal
elements. In this case it is -1.
Motions of H2O
Since there are atoms the full matrix for H2O is a 9x9:
The hydrogen atoms are not on the diagonal since the
atoms themselves are moved as a result of the C2
rotation.
The trace of this matrix is –1. This is also called the
character.
Motions of H2O
We can consider also the result of the σv mirror plane,
which is also a 9x9:
None of the atoms are moved by the symmetry operation
so all of the submatrices representing the vectors lie
along the diagonal. For this operation the trace (also
known as the character) is +3.
Conclusions for symmetry operations
We can conclude with 2 general rules:
1. Only those atoms, which remain in the place following
an operation can contribute to the trace.
2. Each atom contributes the same amount to the trace
since all of the atoms have the same 3x3 matrix.
Using these principles we can see that σv’ has a
character of +1.
The identity always has a character equal to the number
of basis functions. Here E = 9.
Using the character of the 4 symmetry operations of the
C2v point group we can construct a representation Γ.
z1
O
z2
H y2
x2
y1
x1
z3
H y3
x3
9x9 matrix for C2 rotation in H2O
⎛ x1 ⎞ ⎛ −1 0 0 0 0 0 0 0 0 ⎞ ⎛ x1 ⎞
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜ y1 ⎟ ⎜ 0 −1 0 0 0 0 0 0 0 ⎟ ⎜ y1 ⎟
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜ z1 ⎟ ⎜ 0 0 +1 0 0 0 0 0 0 ⎟ ⎜ z1 ⎟
⎜ x ⎟ ⎜ 0 0 0 0 0 0 −1 0 0 ⎟ ⎜ x ⎟
⎜ 2⎟ ⎜
⎟⎜ 2⎟
C2 ⎜ y2 ⎟ = ⎜ 0 0 0 0 0 0 0 −1 0 ⎟ ⎜ y2 ⎟
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜ z2 ⎟ ⎜ 0 0 0 0 0 0 0 0 +1⎟ ⎜ z2 ⎟
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜ x 3 ⎟ ⎜ 0 0 0 −1 0 0 0 0 0 ⎟ ⎜ x3 ⎟
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜ y3 ⎟ ⎜ 0 0 0 0 −1 0 0 0 0 ⎟ ⎜ y3 ⎟
⎜ ⎟ ⎜
⎟⎜ ⎟
⎝ z3 ⎠ ⎝ 0 0 0 0 0 +1 0 0 0 ⎠ ⎝ z3 ⎠
z1
O
z2
H y2
x2
y1
x1
z3
H y3
x3
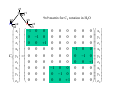
For σv(yz), no atoms are moved so the matrix
representation is
⎛ x1 ⎞ ⎛ −1 0 0 0 0 0 0 0 0 ⎞ ⎛ x1 ⎞
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜ y1 ⎟ ⎜ 0 +1 0 0 0 0 0 0 0 ⎟ ⎜ y1 ⎟
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜ z1 ⎟ ⎜ 0 0 +1 0 0 0 0 0 0 ⎟ ⎜ z1 ⎟
⎜ x ⎟ ⎜ 0 0 0 −1 0 0 0 0 0 ⎟ ⎜ x ⎟
⎜ 2⎟ ⎜
⎟ ⎜ 2⎟
σ v ⎜⎜ y2 ⎟⎟ = ⎜⎜ 0 0 0 0 +1 0 0 0 0 ⎟⎟ ⎜⎜ y2 ⎟⎟
⎜ z2 ⎟ ⎜ 0 0 0 0 0 +1 0 0 0 ⎟ ⎜ z2 ⎟
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜ x3 ⎟ ⎜ 0 0 0 0 0 0 −1 0 0 ⎟ ⎜ x 3 ⎟
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜ y3 ⎟ ⎜ 0 0 0 0 0 0 0 +1 0 ⎟ ⎜ y 3 ⎟
⎜ z ⎟ ⎜ 0 0 0 0 0 0 0 0 +1⎟ ⎜ z ⎟
⎝ 3⎠ ⎝
⎠⎝ 3⎠
9x9 matrices (!) like those above could serve as the representations
of the operations for the water molecule in this basis!
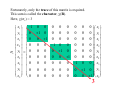
Fortunately, only the trace of this matrix is required.
This sum is called the character, χ(R).
Here, χ(σv) = 3
⎛ x1 ⎞ ⎛ −1 0 0 0 0 0 0 0 0 ⎞ ⎛ x1 ⎞
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜ y1 ⎟ ⎜ 0 +1 0 0 0 0 0 0 0 ⎟ ⎜ y1 ⎟
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜ z1 ⎟ ⎜ 0 0 +1 0 0 0 0 0 0 ⎟ ⎜ z1 ⎟
⎜ x ⎟ ⎜ 0 0 0 −1 0 0 0 0 0 ⎟ ⎜ x ⎟
⎜ 2⎟ ⎜
⎟ ⎜ 2⎟
σ v ⎜⎜ y2 ⎟⎟ = ⎜⎜ 0 0 0 0 +1 0 0 0 0 ⎟⎟ ⎜⎜ y2 ⎟⎟
⎜ z2 ⎟ ⎜ 0 0 0 0 0 +1 0 0 0 ⎟ ⎜ z2 ⎟
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜ x3 ⎟ ⎜ 0 0 0 0 0 0 −1 0 0 ⎟ ⎜ x 3 ⎟
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜ y3 ⎟ ⎜ 0 0 0 0 0 0 0 +1 0 ⎟ ⎜ y 3 ⎟
⎜ z ⎟ ⎜ 0 0 0 0 0 0 0 0 +1⎟ ⎜ z ⎟
⎝ 3⎠ ⎝
⎠⎝ 3⎠
3
For χ(C2) = -1
⎛ x1 ⎞ ⎛ −1 0 0 0 0 0 0 0 0 ⎞ ⎛ x1 ⎞
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜ y1 ⎟ ⎜ 0 −1 0 0 0 0 0 0 0 ⎟ ⎜ y1 ⎟
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜ z1 ⎟ ⎜ 0 0 +1 0 0 0 0 0 0 ⎟ ⎜ z1 ⎟
⎜ x ⎟ ⎜ 0 0 0 0 0 0 −1 0 0 ⎟ ⎜ x ⎟
⎜ 2⎟ ⎜
⎟⎜ 2⎟
C2 ⎜ y2 ⎟ = ⎜ 0 0 0 0 0 0 0 −1 0 ⎟ ⎜ y2 ⎟
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜ z2 ⎟ ⎜ 0 0 0 0 0 0 0 0 +1⎟ ⎜ z2 ⎟
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜ x 3 ⎟ ⎜ 0 0 0 −1 0 0 0 0 0 ⎟ ⎜ x3 ⎟
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜ y3 ⎟ ⎜ 0 0 0 0 −1 0 0 0 0 ⎟ ⎜ y3 ⎟
⎜ ⎟ ⎜
⎟⎜ ⎟
⎝ z3 ⎠ ⎝ 0 0 0 0 0 +1 0 0 0 ⎠ ⎝ z3 ⎠
-1
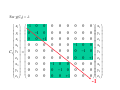
For a reflection through the plane bisecting the H-O-H bond
angle, χ(σv') = +1 since only the O is unshifted and a plane
contributes +1 for each unshifted atom.
The character for the identity element will always be the
dimension of the basis since all labels are unchanged. For
water then, χ(E) = 9.
The representation (Γ) for water in this Cartesian basis is:
E C2 σv(yz)
Γ
9 -1
3
σv'(xz)
1
Reducible and irreducible representations
We call the representation Γ a reducible representation.
Here we write the reducible representation as:
E C2 σv(yz)
Γ
9 -1
3
σv'(xz)
1
The irreducible representations form the basis of the
point group in the same way that the vectors along x, y
and z form the basis for three dimensional space.
H2O belongs the point group C2v. In this point group
There are 4 irreducible representations, A1, B1, A2, B2.
The decomposition of the reducible representation is a
Unique determination of the irreducible reps (or irreps)z
spanned by Γ.
s-Orbitals as a basis
I
II
III
E each atom has 1 and not 3 labels so each operation is a
3x3 matrix as opposed to the 9x9 matrices of the previous
basis. In addition, there can be no sign change for an sorbital. The resulting representation is,
⎛1 0
⎜
E = ⎜0 1
⎜
⎝0 0
0⎞
⎟
0⎟ ;
⎟
1⎠
⎛1 0
⎜
C2 = ⎜ 0 0
⎜
⎝0 1
0⎞
⎟
1⎟ ;
⎟
0⎠
⎛1 0
⎜
σv = ⎜ 0 1
⎜
⎝0 0
0⎞
⎟
0⎟ ;
⎟
1⎠
⎛1 0
⎜
'
σv = ⎜ 0 0
⎜
⎝0 1
0⎞
⎟
1⎟
⎟
0⎠
s-Orbitals as a basis
I
II
III
E each atom has 1 and not 3 labels so each operation is a
3x3 matrix as opposed to the 9x9 matrices of the previous
basis. In addition, there can be no sign change for an sorbital. The resulting representation is,
⎛1 0
⎜
E = ⎜0 1
⎜
⎝0 0
Γ
0⎞
⎟
0⎟ ;
⎟
1⎠
3
⎛1 0
⎜
C2 = ⎜ 0 0
⎜
⎝0 1
0⎞
⎟
1⎟ ;
⎟
0⎠
1
⎛1 0
⎜
σv = ⎜ 0 1
⎜
⎝0 0
0⎞
⎟
0⎟ ;
⎟
1⎠
3
⎛1 0
⎜
'
σv = ⎜ 0 0
⎜
⎝0 1
0⎞
⎟
1⎟
⎟
0⎠
1
Transformation of a basis
If one basis (f ') is a linear combination of another basis (f)
or f ' = Cf, then the representation in one basis should be
similar to that in the other.
It can be shown that the matrix representations of operator
R in these two basis sets (D(R) and D'(R)) are related by a
similarity transformations:
D'(R) = C-1D(R)C
and
D(R) = CD'(R)C-1
i.e., the matrices D(R) and D'(R) are conjugate.
I
II
III
For example, the linear combination of s-orbitals:
X = I + II
Y = I + III
Z = II + III
which can be expressed in matrix form as:
f' =
C
f
⎛ X ⎞ ⎛ 1 1 0⎞ ⎛ I ⎞
⎛ +0.5 +0.5 −0.5⎞
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜
⎟
−1
⎜ Y ⎟ = ⎜ 1 0 1⎟ ⎜ II ⎟ and inverse of C is C = ⎜ +0.5 −0.5 +0.5⎟
⎜ ⎟ ⎜
⎟⎜ ⎟
⎜
⎟
⎝ Z ⎠ ⎝ 0 1 1⎠ ⎝ III⎠
⎝ −0.5 +0.5 +0.5⎠
The matrix representation of C2 (D'(C2)) in the new basis
then is given by D'(C2) = C-1D(C2)C
C-1
⎛ +0.5 +0.5
⎜
or D'(C2) = ⎜ +0.5 −0.5
⎜
⎝ −0.5 +0.5
−0.5⎞ ⎛ 1
⎟⎜
+0.5⎟ ⎜ 0
⎟⎜
+0.5⎠ ⎝ 0
C2
C
0 0⎞ ⎛ 1 1
⎟⎜
0 1⎟ ⎜ 1 0
⎟⎜
1 0⎠ ⎝ 0 1
0⎞ ⎛ 0 1
⎟ ⎜
1⎟ = ⎜ 1 0
⎟ ⎜
1⎠ ⎝ 0 0
0⎞
⎟
0⎟
⎟
1⎠
Γ =1
NEW
D'(C2) = D'(σv') =
⎛0 1
⎜
⎜1 0
⎜
⎝0 0
0⎞
⎟
0⎟
⎟
1⎠
χ=1
OLD
⎛1 0
⎜
D(C2) = D (σv') = ⎜ 0 0
⎜
⎝0 1
0⎞
⎟
1⎟
⎟
0⎠
χ=1
⎛1 0
⎜
D'(E) = D'(σv) = ⎜ 0 1
⎜
⎝0 0
0⎞
⎟
0⎟
⎟
1⎠
χ=3
⎛1 0
⎜
D(E) = D(σv) = ⎜ 0 1
⎜
⎝0 0
0⎞
⎟
0⎟
⎟
1⎠
χ=3
Note that the representation for C2 and σv' have changed, but
in all cases the character is invariant with the similarity
transformation.
Thus, all the members of a class of operations can be treated
together since they are related by a similarity transformation
and must have the same characters.
The two 3x3 bases used to this point can be viewed as
consisting of a 1x1 matrix (one basis vector not rotated into
any of the others by any R: I & Z) and a 2x2 submatrix (two
basis vectors rotated into one another by at least one R).
Thus, the 3x3 representation has been reduced to a 1x1 and a
2x2.
Indeed, the 2x2 matrix can be reduced into two 1x1 matrices.
In this process, a large reducible representation is
decomposed into smaller (usually 1x1 but sometimes 2x2 and
3x3) irreducible representations.
Consider the symmetry adapted linear combinations
(SALC's)
A—C for water s-orbitals
I
II
A=I
III
B = II + III
II
III
C = II - III
⎛ A⎞ ⎛ 1 0 0 ⎞ ⎛ I ⎞ ⎛ I ⎞
⎜ ⎟ ⎜
⎟⎜ ⎟ ⎜
⎟
⎜ B⎟ = ⎜ 0 1 1 ⎟ ⎜ II ⎟ = ⎜ II + III⎟
⎜ ⎟ ⎜
⎟⎜ ⎟ ⎜
⎟
⎝ C⎠ ⎝ 0 1 −1⎠ ⎝ III⎠ ⎝ II − III⎠
In this basis, no basis vector is changed into another by a
symmetry operation, i.e., this basis is symmetry adapted.
Old 3x3 is now three 1x1 matrices and reducible
representation ΓS is now three irreducible representations,
ΓA, ΓB and ΓC.
i.e., ΓS = ΓA + ΓB + ΓC
I
A
E C2 σ σ'
I
II
III
ΓS = 3 1 3 1
ΓA 1 1 1 1
ΓB 1 1 1 1
ΓC 1 -1 1 -1
ΓS 3 1 3
1
ΓA = 1 1 1 1
II
III
B
ΓB = 1 1 1 1
II
III
ΓC = 1 -1 1 -1
C
The term irreducible representation is used so frequently
that it is often abbreviated as "irrep". We will also use this
abbreviation throughout this lecture,
irrep ≡ irreducible representation
Decomposing a reducible representation into irreps is a very
important process, and a procedure to accomplish the
decomposition will be described shortly.
Point Group Representations
A point group representation is a basis set in which the
irreducible representations are the basis vectors.
The irreps form the a complete orthonormal basis for an mdimensional space, where m is the number of irreducible
representations and is equal to the number of classes in
the group.
These considerations are summarized by the following
rules.
1. The number of basis vectors or irreps (m) equals the
number of classes.
2. The sum of the squares of the dimensions of the m
irreps equals the order,
m
∑d
i =1
2
i
=h
expect at least one χ(E) > 1 for Cn (n > 2)
The character of the identity operation equals the dimension
of the representation, χ(E) = di which is referred to as the
degeneracy of the irrep.
The degeneracy of most irreducible representations is 1 (nondegenerate representations are 1x1 matrices) but can
sometimes be 2 or 3.
No character in an irreducible representation can exceed the
dimension of the representation. Thus, in non-degenenerate
representations, all characters must be ±1.
3. The member irreps are orthonormal, i.e., the sum of
the squares of the characters in any irrep is equal to the
order (row normalization), while the sum of the product
of the characters over all operations in two different
irreps is zero (orthogonality).
∑ g(R) χ (R)χ
i
j
(R) = hδij
R
• δij is the Kroniker delta (0 when i≠j and 1 when i=j),
• where the sum is over all of the classes of
operations,
• g(R) is the number of operations, R, in the class,
• χi(R) and χj(R) are the characters of the operation
R in the ith and jth irreps,
• h is the order of the group.
4. The sum of the squares of the characters of any
operation over all of the irreps times the number of
operations in the class is equal to h, i.e., columns of the
representation are also normalized.
m
∑ g(R) χ
i=1
2
i
(R) = h
where m is the number of irreducible representations
5. The sum of the products of the characters of any two
different operations over all of the irreps is zero, i.e.,
columns of the representation are also orthogonal.
m
∑ χ (R' )χ
i=1
i
i
(R) = 0
6. The first representation is always the totally symmetric
representation in which all characters are +1.
7. Any reducible representation in the point group can
be expressed as a linear combination of the
irreducible representations.
Let’s generate the C2v point group, {C2v⏐E, C2, σ, σ'}
C2v E C
σv
σv'
?
b
e
h
?
c
f
i
2
Γ1
Γ2
Γ3
Γ4
Rule 2
d1
d2
d3
d4
?
a
d
g
d12 + d22 + d32 + d42 = h = 4
d1 = 1
2
d22 + d32 + d 42 = 3
d2 = d3 = d4 = 1
Rule 6 (χ(Γ1)=+1)
Use orthogonality to construct the irreducible representations
C2v E
Γ1 1
C2
1
σv
1
σv'
1
Γ2
1
a
b
c
Γ3
1
d
e
f
Γ4
1
g
h
i
•Rule 3 (row 1 x row 2)
• 1+a+b+c=0
• a + b + c = -1
• a = 1; b = c = -1 (others possible)
Use orthogonality to construct the irreducible representations
C2v
E
C 2 σv
σv'
Γ1
Γ2
1
1
1
1
1
-1
1
-1
Γ3
Γ4
1
1
d
g
e
h
f
i
•Rule 3 (row 2 x row 3)
• 1+d-e-f=0
• d - e - f = -1
• d = f = -1; e = +1 (others possible)
Use orthogonality to construct the irreducible representations
Γ1
E
1
C2
1
σv
1
σv'
1
Γ2
1
1
-1
-1
Γ3
Γ4
1
1
-1
g
1
h
-1
i
C2v
•Rule 3 (row 3 x row 4)
• 1-g+h-i=0
• - g + h - i = -1
• g = h = -1; i = +1
C2v
Γ1
Γ2
Γ3
Γ4
E
1
1
1
1
C2
1
1
-1
-1
σv
1
-1
1
-1
σv'
1
-1
-1
1
Mulliken symbols for irreps:
• "A"—symmetric wrt rotation about principle axis
(χ[Cn(z)] =+1)
• "B"— irrep is antisymmetric wrt rotation about
the principle axis (χ[Cn(z)] = -1)
• "E" —doubly degenerate irrep (d = 2 ⇒ χ(E) = 2)
• "T"—triply degenerate irrep (d = 3 ⇒ χ(E) = 3)
• "G" and "H”—degeneracies of 4 and 5, respectively.
In many instances there are more than one A, B, E , etc.
irreps present in the point group so subscripts and
superscripts are used
g or u subscripts are used in point groups with centers of
symmetry (i) to denote gerade (symmetric) and ungerade
(antisymmetric) with respect to inversion
' and " are used to designate symmetric and antisymmetric
with respect to inversion through a σh plane
numerical subscripts are used otherwise
For C2v:
C2v
Α1
Α2
Β1
Β2
E
1
1
1
1
C2
1
1
-1
-1
σv
1
-1
1
-1
σv'
1
-1
-1
1
Determination of Reducible
Representations
Oxygen s-orbitals in water,
I
C2v E C2 σv σv'
ΓO(s) +1 +1 +1 +1
ΓO(s) = a1
s-orbitals on central elements will always transform as the
totally symmetric representation but are not included in
character tables
Oxygen p-orbitals in water,
px
C2v
pz
px
py
Γp
E
+1
+1
+1
3
C2
+1
-1
-1
-1
pz
py
σv(xz)
+1
+1
-1
1
σv'(yz)
+1
a1
-1
b1
+1
b2
1
Thus, Γp = a1 + b1 + b2. The px orbital is said to
• form the basis for the b1 representation,
• have b1 symmetry, or
• transform as b1
Translations along the x, y and z directions (x, y, z)
transform in the same way as px, py and pz.
z
O y
x
H
O
H H
ΓT(y) = 1 -1 1 -1
H
C2v E C2 σv(xz) σv'(yz)
Tz +1 +1
+1
+1
a1
Tx +1 -1
Ty +1 -1
Γtrans 3 -1
-1
+1
1
+1
-1
1
b2
b1
Thus, Γtrans = a1 + b1 + b2
Rotation of the water molecule,
z
O y
x
H
O
H
H
ΓR(z) = 1 1 -1 -1
H
C2v
E
C2 σv(xz) σv'(yz)
Rz
Rx
+1
+1
+1
-1
-1
-1
-1
+1
a2
b2
Ry
+1
-1
+1
-1
b1
Γrot
3
-1
1
1
Thus, Γrot = a2 + b1 + b2
In most character tables, C2v has the following form:
C2v
Α1
Α2
E
1
1
C2 σv(xz) σv'(yz)
1
1
1
1
-1
-1
Β1
1
-1
1
Β2
1
-1
-1
z
Rz
x2, y2, z2
xy
-1
x, Ry
xz
1
y, Rx
yz
The final column gives squares and binary products and
represent the transformation properties of the d-orbitals.
Let’s generate the C3v point group.
The operations of C3v are E, 2C3, 3σv (h=6, m=3)
d12 + d22 + d32 = 6
d1 = d2 = 1 and d3 = 2.
Since the dimensions of the irreps are the χ(E) and every
group contains the totally symmetric irrep,
C3v
1E
2C3
3σv
Γ1
1
1
1
Γ2
1
j
k
Γ3
2
m
n
Orthogonality of Γ1 with Γ2:
(1)(1)(1) + (2)(1)(j) + (3)(1)(k) = 0
1 + 2j + 3k = 0
j = +1 and k = -1
Normalization of Γ3 means (1)(2)2 + 2(m2) + 3(n2) = 6
so, m = -1 and n =0.
C3v
1E
2C3
3σv
Γ1
Γ2
Γ3
1
1
2
1
1
-1
1
-1
0
For C3v,
C3v
1E
2C3
3σv
Α1
Α2
Ε
1
1
2
1
1
-1
1
-1
0
The ammonia molecule (C3v point group) and the
coordinate system used in the following discussion is
given below (one N-H bond in the XZ plane).
z
H
H
N
H
x
y
H
H
H
H
H
H
H
H
H
px
py
pz
The N-pz orbital is not changed by any of the operations of
the group, i.e., it is totally symmetric and transforms as a1
However, px and py are neither symmetric nor antisymmetric
with respect to the C3 or σv operations, but rather go into
linear combinations of one another and must therefore be
considered together as components of a 2 dimensional
representation.
The matrices in this irreducible representation will be 2x2
and not 1x1. The character of the identity operation will then
be 2 (the trace of a 2x2 matrix with 1's on the diagonal), i.e.,
χ(E)=2.
A rotation through an angle 2π/n can be represented by
the following transformation:
⎛ x' ⎞ ⎛ cos(2π / n) sin(2π / n)⎞ ⎛ x⎞
⎜ ⎟=⎜
⎟⎜ ⎟
⎝ y' ⎠ ⎝ -sin(2π / n) cos(2π / n)⎠ ⎝ y⎠
the trace of the Cn rotation matrix is 2cos(2π/n)
which for n=3 is 2cos(2π/3) = 2(-0.5) = -1, i.e.,
χ(C3) = -1
The character for sv can be determined by the
effect of reflection through any one of the three sv
since they are all in the same class.
Use sv(xz) which results in px → px and py → -py or,
⎛ x' ⎞ ⎛ 1 0 ⎞ ⎛ x ⎞
⎜ ⎟=⎜
⎟⎜ ⎟
⎝ y' ⎠ ⎝ 0 −1⎠ ⎝ y ⎠
χ(sv) = 0
H
H
H
px
H
H
H
py
H
H
H
pz
The transformation properties of the px and py
orbitals are represented as,
C3v
Γpx,py
E 2C3
2
-1
3σv
0
Γpx,py = e
The px and py orbitals are degenerate in C3v symmetry and are
taken together to form a basis for the two-dimensional
irreducible representation, e.
Treating rotations and binary products as before, we
can represent the C3v point group as
C3v
E
2C3 3σv
Α1
Α2
1
1
1
1
1
-1
Ε
2
-1
0
z
Rz
x2+y2; z2
(x,y);(Rx,Ry) (x2-y2,xy);(xz,yz)
The x2-y2 and xy orbitals are also degenerate as are the
xz and yz orbitals
Decomposing Reducible Representations
In the determination of molecular orbital or vibrational symmetries, a
reducible representation is generated from an appropriate basis set
and then decomposed into its constituent irreducible representations.
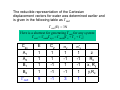
1
ai = ∑ g(R)χ i (R)χ (R )
h R
ai: the # of times that ith irrep appears in the reducible representation
h: the order of the group
R: an operation of the group
g(R): the number of operations in the class
χi(R): the character of the Rth operation in the ith irrep
χ(R): the character of the Rth operation in the reducible representation
Γred = 7 1 1 of the C3v point group. The order of the point group is 6.
C3v 1E 2C 3σv
C3v
1E 2C3
3σv
3
Α1
1
1
1
Α2
1
1
-1
Γred
7
1
1
Γred
7
1
1
a(a1) = 1/6{(1)(1)(7)+(2)(1)(1)+(3)(1)(1)} = 1/6{12} = 2
a(a2) = 1/6{(1)(1)(7)+(2)(1)(1)+(3)(-1)(1)} = 1/6{6} = 1
C3v
E
1E
2
Γred
7
2C3 3σv
-1
0
1
1
a(e) = 1/6{(1)(2)(7) + (2)(-1)(1) + (3)(0)(+1)} = 1/6{12} = 2
The reducible representation is decomposed as:
Γred = 2a1 + a2 + 2e
The results can be verified by adding the characters of
the irreps,
C3v
1E
2C3
3σv
2a1
a2
2e
Γred
2
1
4
7
2
1
-2
1
2
-1
0
1
Problem I.7 Decompose the following reducible representations of the C4v point group.
C4v
Γ1
Γ2
Γ3
Γ4
E
11
6
5
4
2C4
1
0
1
-4
C2
-1
2
-3
4
2σv
5
0
-1
0
2σd
1
0
-1
0
The reducible representation of the Cartesian
displacement vectors for water was determined earlier and
is given in the following table as Γcart
Γcart(E) = 3N
Here is a shortcut for generating Γcart for any system:
Γcart = ΓunshΓxyz = Γunsh[Γx + Γy + Γz]
C2v
A1
A2
B1
B2
E
1
1
1
1
C2
1
1
-1
-1
σv
1
-1
1
-1
σ'v
1
-1
-1
1
Γcart
9
-1
3
1
z
Rz
x, Ry
y,Rx
C2v
A1
A2
B1
B2
E
1
1
1
1
C2
1
1
-1
-1
σv
1
-1
1
-1
σ'v
1
-1
-1
1
Γcart
9
-1
3
1
z
Rz
x, Ry
y,Rx
Decomposition of Γcart yields,
a(a1) = 1/4 {(1)(1)(9) + (1)( 1)(-1) + (1)( 1)(3) + (1)( 1)(1)} = 1/4 {12} = 3
a(a2) = 1/4 {(1)(1)(9) + (1)( 1)(-1) + (1)(-1)(3) + (1)(-1)(1)} = 1/4 { 4} = 1
a(b1) = 1/4 {(1)(1)(9) + (1)(-1)(-1) + (1)( 1)(3) + (1)(-1)(1)} = 1/4 {12} = 3
a(a2) = 1/4 {(1)(1)(9) + (1)(-1)(-1) + (1)(-1)(3) + (1)( 1)(1)} = 1/4 { 8} = 2
Γcart = 3a1 + a2 + 3b1 + 2b2
Of these 3N degrees of freedom, three are translational,
three are rotational and the remaining 3N-6 are the
vibrational degrees of freedom.
Thus, to get the symmetries of the vibrations, the
irreducible representations of translation and rotation need
only be subtracted from Γcart, but the irreps of rotation and
translation are available from the character table.
For the water molecule,
Γvib = Γcart - Γtrans - Γrot
= {3a1 + a2 + 3b1 + 2b2} - {a1 + b1 + b2} - {a2 + b1 + b2}
= 2a1 + b1
Problem I.8 Determine the symmetries of the vibrations of NH3, PtCl42- and SbF5.
Direct Products.
Direct Products: The representation of the product of two
representations is given by the product of the characters of
the two representations.
Verify that under C2v symmetry A2 ⊗ B1 = B2
C2v
A2
B1
A2 ⊗ B1
E
1
1
1
C2
1
-1
-1
σv
-1
1
-1
σ'v
-1
-1
1
As can be seen above, the characters of A2 ⊗ B1 are
those of the B2 irrep.
Verify that A2 ⊗ B2 = B1, B2 ⊗ B1= A2
Also verify that
• the product of any non degenerate
representation with itself is totally symmetric
and
• the product of any representation with the
totally symmetric representation yields the
original representation
Note that,
•A x B = B; while A x A = B x B = A
•"1" x "2" = "2”; while "1" x "1" = "2" x "2" = "1”
•g x u = u; while g x g = u x u =g.