Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
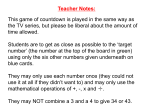
Chapter 1 Introduction This chapter is intended as a gentle and casual introduction to the themes developed in these lecture notes. It cites only one reference book for each theme and omits voluntarily all further citations to let it remain an overview of usually independent but here connected topics: Morse theory, topography and mathematical morphology. The three have in common the fundamental role of the (iso)level sets of functions, whose structure is one of the main themes of the present book. The present introduction serves to locate each Chapter into this general context. 1.1 Morse Theory and Topography In his classical treaty on Morse theory, J. Milnor motivates the subject by discussing the variation of topology of a part of a torus below a plane, as a function of the height of the plane [75]. This reveals the global topology of the torus. Now this analysis can be done also for the graph of a function. The subgraph of a real function defined on the Euclidean plane, called here level set, reveals interest points of the surface, where a slight variation of level changes the structure of the level set. A customary way to represent the topography on a map is to draw the level lines, that is the lines of constant elevation, as in Fig. 1.1. These level lines, if dense enough, reveal almost all about the terrain they represent. Apart from peaks (local maxima) and pits (local minima), a third category of interesting points emerges as passes (saddle points), which are points where two distinct level lines merge (see Fig. 1.2). From a mathematical point of view, this analysis can be done with basic differential calculus tools if the function is Morse. A Morse function is twice differentiable and wherever its Jacobian vanishes, its Hessian is invertible. For such well behaved functions, singular points, i.e., points of null Jacobian, are isolated, and the signs of the eigenvalues of the Hessian reveal the nature of the singularity: V. Caselles and P. Monasse, Geometric Description of Images as Topographic Maps, Lecture Notes in Mathematics 1984, c Springer-Verlag Berlin Heidelberg 2010 DOI 10.1007/978-3-642-04611-7 1, 1 2 1 Introduction Fig. 1.1 Aerial photograph and topographic map of terrain. Images courtesy the U.S. Geological Survey. 20 10 0 −10 −20 −30 −40 −50 M 2 m 1 0 S −2 −1 −2 −1.5 −1 −0.5 0 0.5 1 −3 1.5 2 2.5 Fig. 1.2 Some level lines and critical points of a Morse function. M is a maximum, m a minimum and S a saddle point. – 2 positive eigenvalues: a minimum; – 2 negative eigenvalues: a maximum; – 2 eigenvalues of different sign: a saddle point. As our interest lies mostly in image processing, where a gray level image is considered as a function defined on a rectangle of the plane, with the value at a point indicating the amount of light received (see Fig. 1.3), the Morse model is ill suited for our purposes because of one overly optimistic assumption: the invertibility of the Hessian at critical points. Whereas the twice differentiability may be admissible, because a convolution with a Gaussian kernel of small variance would smooth and reduce the effect of noise, the Hessian condition forbids the presence of a plateau in the image. Although an approximation by a Morse function is possible, as Morse functions are dense among continuous functions on a closed rectangle, there is no canonical way 1.2 Mathematical Morphology 3 250 200 150 100 50 0 0 10 20 30 10 40 50 60 70 Fig. 1.3 60 50 40 30 0 20 A gray-level image and its representation as a bivariate function graph. to do this approximation, and the analysis of a Morse approximation does not necessarily reveal much about the topology of the original function. 1.2 Mathematical Morphology Mathematical morphology, founded by G. Matheron in the 1960s and 1970s, is an image processing theory based on manipulation of sets [69]. The basic operators of mathematical morphology are erosions and dilations. A dilation δB by a set B (called structuring element) is an operator that maps a set X to the set X + B. Its dual operator is the erosion by the symmetric of B, ε−B , defined by ε(X) = δ(X c )c . Both commute with translations. families of dilations and If (δi ) and (εi ) are erosions, the operators δ and ε defined by δ(X) = i δi (X) and ε(X) = i εi (X) are also a dilation and an erosion. In this way, non trivial new operators may be defined. Another way is to combine a dual erosion/dilation. The opening δ ◦ ε and the closing ε ◦ δ are idempotent. Although originally defined for binary images, mathematical morphology was naturally extended to gray level images by the threshold decomposition and the superposition principle as illustrated by Fig. 1.4. In other words, mathematical morphology operates on level sets of the image, whence the interest of an efficient decomposition of an image into its level sets. 4 1 Introduction Threshold δε decomposition Superposition ε δ ε δ Fig. 1.4 Opening operator by a disk on a gray-level image through threshold decomposition and superposition. 1.3 Inclusion Tree of Level Sets For a continuously differentiable function, at almost all levels the level lines are Jordan curves. These have a notion of interior and exterior, and as they do not cross, they can be organized in a tree driven by the inclusion order relation: a level line is descendant of another if it is contained in the inner domain of the latter, as in Fig. 1.5. The regular levels do not include in particular levels of extrema, and therefore cannot be directly accounted for in the tree. In a pioneering work intended to extend the total variation of univariate real functions to functions of two variables, A. Kronrod pointed out that the differentiability has no relevance to such an analysis, and that continuity is sufficient to organize the level sets, defined here as sets of constant level [50]. By defining a kind of quotient topology for the equivalence relation of two points being equivalent if there is a continuum inside a level set joining them, the family of level sets is endowed with a topology making it a dendrite, the topological equivalent of an unrooted tree. Even though the (iso-)level sets are not Jordan curves, they can still be organized in a tree. But there is no root for this tree, in other words there is no direction for the dendrite. Actually it can be directed by the choice of a point at infinity. In Chap. 2, we show that even the continuity condition can be relaxed to semicontinuity, and that the appropriate sets to consider are the upper and lower level sets. These can be organized in a tree because the choice of a point at infinity distinguishes between internal holes and exterior of a level set. Whereas it is straightforward to define a tree of upper, or a tree of lower, level sets, their merging is only enabled by the definition of a point at infinity. The semicontinuity requirement, instead of continuity, is nice to have, because it is compatible with the Mumford-Shah approximation of an image by a piecewise constant image. For example, a piecewise constant model for the image in Fig. 1.3 is obviously better adapted than a global continuous one. Moreover, it fits perfectly the order 0 interpolation of a digital image, that is, the nearest neighbor approximation. This provides the mathematical foundation for the Fast Level Set Transform (FLST), an algorithm that we detail in Chap. 6. 1.4 Topological Description and Computation of Topographic Maps 5 260 240 220 200 180 160 140 120 100 80 60 40 A 180 160 140 120 100 80 60 40 20 A D 0 20 40 D C E F B F 0 Fig. 1.5 E B C 60 80 100 120 140 160 180 200 Tree of level lines of a Morse function. 1.4 Topological Description and Computation of Topographic Maps Going back to the continuity assumption in order to describe in the manner of Morse theory a topographic map, we cannot guarantee that critical points are isolated, and no discrete description of events among level sets is possible. Again, there are many possibilities to approximate the function by another one not suffering from this drawback, but one category stands out as the most natural one: the grain filters. They simply remove small scale oscillations of the function, yielding what will be called a weakly oscillating approximation of the image. Chapter 3 discusses these filters from the point of view of mathematical morphology. One of them treats upper and lower level sets in a symmetric manner and is preferable as it is self-dual in the vocabulary of mathematical morphology (see Fig. 1.6). Weakly oscillating functions may be analyzed in a discrete description. Chapter 4 discusses several notions that can be defined for such functions: on the one hand the maximal monotone sections (branches of the inclusion tree) and their limit levels (called critical levels), on the other hand the signature of level sets (the family of extrema it contains) and the levels at which the signature changes (called singular levels). These notions are shown to coincide, and when N = 2 they generalize to a weakly oscillating function the critical levels of a Morse function. When N = 3, the notion of critical value reflects the changes in the number of connected components of isolevel 6 1 Introduction Fig. 1.6 An image before (left) and after (right) application of a grain filter, which removes many small oscillations. sets [u = λ] as λ ∈ R varies. Let us mention that, in its present form, this theory has not been published elsewhere. In Chap. 5 we describe an algorithm to construct the tree of shapes by fusion of the trees of connected components of upper and lower level sets. Though the algorithm is less efficient than the algorithm described in Chap. 6, valid when N = 2, it is adapted to any dimension. The considerations of Chap. 4 justify the construction of the tree for an order 1 interpolation of a digital image, i.e., bilinear interpolation. The algorithm to extract it is a variant of the FLST and is presented in Chap. 7. Some applications may use rather the pixelized version for the complete description of the discrete data and its flexibility (invariance to contrast change, among others), while others prefer to use the continuous interpolation for its more regular level lines. Several applications relying on the inclusion tree have been developed in recent years. We present a few examples of some of them in Chap. 8, ranging from low-level image processing (edge detection, corner extraction) to image alignment and local scale definition. 1.5 Organization of These Notes The mathematically inclined reader may be most interested in Chaps. 2 to 6, which generalizes the topological Morse description to continuous or semicontinuous functions. Mathematical morphologists may consider more closely Chap. 3 about grain filters, although it is presented in the continuous setting, not in the discrete topology setting most frequent in mathematical morphology. 1.5 Organization of These Notes 7 The computer scientist may focus on Chaps. 6 and 7 for algorithmic considerations, keeping in mind that their full justification are respectively in Chaps. 2 and 4. All may find motivation for this work in the image processing applications presented in Chap. 8, knowing that their full description must be found among articles referenced in the bibliography.