Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Introduction to Statistical Thought
Michael Lavine
November 11, 2007
i
c 2005 by Michael Lavine
Copyright C ONTENTS
List of Figures
vi
List of Tables
x
Preface
xi
1 Probability
1.1 Basic Probability . . . . . . . . . . . . . . .
1.2 Probability Densities . . . . . . . . . . . . .
1.3 Parametric Families of Distributions . . . . .
1.3.1 The Binomial Distribution . . . . . .
1.3.2 The Poisson Distribution . . . . . . .
1.3.3 The Exponential Distribution . . . .
1.3.4 The Normal Distribution . . . . . . .
1.4 Centers, Spreads, Means, and Moments . .
1.5 Joint, Marginal and Conditional Probability
1.6 Association, Dependence, Independence . .
1.7 Simulation . . . . . . . . . . . . . . . . . .
1.7.1 Calculating Probabilities . . . . . . .
1.7.2 Evaluating Statistical Procedures . .
1.8 R . . . . . . . . . . . . . . . . . . . . . . . .
1.9 Some Results for Large Samples . . . . . . .
1.10 Exercises . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
1
1
6
14
14
17
20
22
29
40
51
57
57
61
72
77
81
2 Modes of Inference
2.1 Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Data Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Summary Statistics . . . . . . . . . . . . . . . . . . . . . . . .
93
93
94
95
ii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
CONTENTS
2.3
2.4
2.5
2.6
2.7
2.8
iii
2.2.2 Displaying Distributions . . . . . . . . . . .
2.2.3 Exploring Relationships . . . . . . . . . . .
Likelihood . . . . . . . . . . . . . . . . . . . . . . .
2.3.1 The Likelihood Function . . . . . . . . . . .
2.3.2 Likelihoods from the Central Limit Theorem
2.3.3 Likelihoods for several parameters . . . . .
Estimation . . . . . . . . . . . . . . . . . . . . . . .
2.4.1 The Maximum Likelihood Estimate . . . . .
2.4.2 Accuracy of Estimation . . . . . . . . . . . .
2.4.3 The sampling distribution of an estimator .
Bayesian Inference . . . . . . . . . . . . . . . . . .
Prediction . . . . . . . . . . . . . . . . . . . . . . .
Hypothesis Testing . . . . . . . . . . . . . . . . . .
Exercises . . . . . . . . . . . . . . . . . . . . . . . .
3 Regression
3.1 Introduction . . . . . . . . . . . . .
3.2 Normal Linear Models . . . . . . .
3.2.1 Introduction . . . . . . . .
3.2.2 Inference for Linear Models
3.3 Generalized Linear Models . . . . .
3.3.1 Logistic Regression . . . . .
3.3.2 Poisson Regression . . . . .
3.4 Predictions from Regression . . . .
3.5 Exercises . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
4 More Probability
4.1 More Probability Density . . . . . . .
4.2 Random Vectors . . . . . . . . . . . .
4.2.1 Densities of Random Vectors .
4.2.2 Moments of Random Vectors
4.2.3 Functions of Random Vectors
4.3 Representing Distributions . . . . . .
4.4 Exercises . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
100
113
132
132
139
144
154
154
155
158
164
174
178
192
.
.
.
.
.
.
.
.
.
202
. 202
. 210
. 210
. 221
. 236
. 236
. 245
. 250
. 253
.
.
.
.
.
.
.
263
. 263
. 264
. 265
. 266
. 266
. 271
. 276
5 Special Distributions
279
5.1 Binomial and Negative Binomial . . . . . . . . . . . . . . . . . . . . 279
5.2 Multinomial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 290
5.3 Poisson . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292
CONTENTS
iv
5.4
5.5
5.6
5.7
Uniform . . . . . . . . . . . . . . . . . . . .
Gamma, Exponential, Chi Square . . . . . .
Beta . . . . . . . . . . . . . . . . . . . . . .
Normal . . . . . . . . . . . . . . . . . . . .
5.7.1 The Univariate Normal Distribution .
5.7.2 The Multivariate Normal Distribution
5.8 t and F . . . . . . . . . . . . . . . . . . . .
5.8.1 The t distribution . . . . . . . . . . .
5.8.2 The F distribution . . . . . . . . . .
5.9 Exercises . . . . . . . . . . . . . . . . . . . .
6 More Models
6.1 Hierarchical Models . . . . . . .
6.2 Time Series and Markov Chains .
6.3 Contingency Tables . . . . . . . .
6.4 Survival analysis . . . . . . . . .
6.5 The Poisson process . . . . . . .
6.6 Change point models . . . . . . .
6.7 Spatial models . . . . . . . . . .
6.8 Point Process Models . . . . . . .
6.9 Evaluating and enhancing models
6.10 Exercises . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7 Mathematical Statistics
7.1 Properties of Statistics . . . . . . . . . . . . . . .
7.1.1 Sufficiency . . . . . . . . . . . . . . . . .
7.1.2 Consistency, Bias, and Mean-squared Error
7.1.3 Efficiency . . . . . . . . . . . . . . . . . .
7.1.4 Asymptotic Normality . . . . . . . . . . .
7.1.5 Robustness . . . . . . . . . . . . . . . . .
7.2 Transformations of Parameters . . . . . . . . . .
7.3 Information . . . . . . . . . . . . . . . . . . . . .
7.4 More Hypothesis Testing . . . . . . . . . . . . . .
7.4.1 p values . . . . . . . . . . . . . . . . . . .
7.4.2 The Likelihood Ratio Test . . . . . . . . .
7.4.3 The Chi Square Test . . . . . . . . . . . .
7.4.4 Power . . . . . . . . . . . . . . . . . . . .
7.5 Exponential families . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
303
305
313
315
315
320
328
328
334
334
.
.
.
.
.
.
.
.
.
.
342
. 342
. 343
. 357
. 357
. 357
. 357
. 358
. 358
. 358
. 358
.
.
.
.
.
.
.
.
.
.
.
.
.
.
360
. 360
. 360
. 363
. 365
. 365
. 365
. 365
. 365
. 365
. 366
. 366
. 366
. 366
. 366
CONTENTS
7.6
7.7
7.8
7.9
7.10
Location and Scale Families
Functionals . . . . . . . . .
Invariance . . . . . . . . . .
Asymptotics . . . . . . . . .
Exercises . . . . . . . . . . .
Bibliography
v
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
366
366
366
366
371
375
L IST
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
1.10
1.11
1.12
1.13
1.14
1.15
1.16
1.17
1.18
1.19
1.20
1.21
1.22
1.23
OF
F IGURES
pdf for time on hold at Help Line . . . . . . . . . . . . . .
pY for the outcome of a spinner . . . . . . . . . . . . . . .
(a): Ocean temperatures; (b): Important discoveries . . .
Change of variables . . . . . . . . . . . . . . . . . . . . . .
Binomial probabilities . . . . . . . . . . . . . . . . . . . .
P[X = 3 | λ] as a function of λ . . . . . . . . . . . . . . . .
Exponential densities . . . . . . . . . . . . . . . . . . . . .
Normal densities . . . . . . . . . . . . . . . . . . . . . . .
Ocean temperatures at 45◦ N, 30◦ W, 1000m depth . . . . .
Normal samples and Normal densities . . . . . . . . . . .
hydrographic stations off the coast of Europe and Africa .
Water temperatures . . . . . . . . . . . . . . . . . . . . . .
Two pdf’s with ±1 and ±2 SD’s. . . . . . . . . . . . . . . .
Water temperatures with standard deviations . . . . . . .
Permissible values of N and X . . . . . . . . . . . . . . . .
Features of the joint distribution of (X, Y ) . . . . . . . . .
Lengths and widths of sepals and petals of 150 iris plants .
correlations . . . . . . . . . . . . . . . . . . . . . . . . . .
1000 simulations of θ̂ for n.sim = 50, 200, 1000 . . . . .
1000 simulations of θ̂ under three procedures . . . . . . .
Monthly concentrations of CO2 at Mauna Loa . . . . . . .
1000 simulations of a FACE experiment . . . . . . . . . . .
Histograms of craps simulations . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
7
9
11
13
16
19
21
24
25
27
31
32
37
41
44
48
52
55
60
64
66
69
82
2.1 quantiles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
2.2 Histograms of tooth growth . . . . . . . . . . . . . . . . . . . . . . . 101
2.3 Histograms of tooth growth . . . . . . . . . . . . . . . . . . . . . . . 102
vi
LIST OF FIGURES
2.4
2.5
2.6
2.7
2.8
2.9
2.10
2.11
2.12
2.13
2.14
2.15
2.16
2.17
2.18
2.19
2.20
2.21
2.22
2.23
2.24
2.25
2.26
2.27
2.28
2.29
2.30
2.31
2.32
2.33
2.34
2.35
2.36
2.37
2.38
2.39
Histograms of tooth growth . . . . . . . . . . . . . . . . . . . . . .
calorie contents of beef hot dogs . . . . . . . . . . . . . . . . . . .
Strip chart of tooth growth . . . . . . . . . . . . . . . . . . . . . . .
Quiz scores from Statistics 103 . . . . . . . . . . . . . . . . . . . .
QQ plots of water temperatures (◦ C) at 1000m depth . . . . . . . .
Mosaic plot of UCBAdmissions . . . . . . . . . . . . . . . . . . . . .
Mosaic plot of UCBAdmissions . . . . . . . . . . . . . . . . . . . . .
Old Faithful data. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Waiting time versus duration in the Old Faithful dataset . . . . . .
Time series of duration and waiting time at Old Faithful . . . . . .
Time series of duration and waiting time at Old Faithful . . . . . .
Temperature versus latitude for different values of longitude . . . .
Temperature versus longitude for different values of latitude . . . .
Spike train from a neuron during a taste experiment. The dots show
the times at which the neuron fired. The solid lines show times at
which the rat received a drop of a .3 M solution of NaCl. . . . . . .
LikelihoodPfunction for the proportion of red cars . . . . . . . . . .
`(θ) after
yi = 40 in 60 quadrats. . . . . . . . . . . . . . . . . . .
Likelihood for Slater School . . . . . . . . . . . . . . . . . . . . . .
Marginal and exact likelihoods for Slater School . . . . . . . . . . .
Marginal likelihood for mean CEO salary . . . . . . . . . . . . . . .
FACE Experiment: data and likelihood . . . . . . . . . . . . . . . .
Likelihood function for Quiz Scores . . . . . . . . . . . . . . . . . .
Log of the likelihood function for (λ, θf ) in Example 2.13 . . . . . .
Likelihood function for the probability of winning craps . . . . . .
Sampling distribution of the sample mean and median . . . . . . .
Histograms of the sample mean for samples from Bin(n, .1) . . . . .
Prior, likelihood and posterior in the seedlings example . . . . . . .
Prior, likelihood and posterior densities for λ with n = 1, 4, 16 . . .
Prior, likelihood and posterior densities for λ with n = 60 . . . . . .
Prior, likelihood and posterior density for Slater School . . . . . . .
Plug-in predictive distribution for seedlings . . . . . . . . . . . . .
Predictive distributions for seedlings after n = 0, 1, 60 . . . . . . . .
pdf of the Bin(100, .5) distribution . . . . . . . . . . . . . . . . . . .
pdfs of the Bin(100, .5) (dots) and N(50, 5) (line) distributions . . .
Approximate density of summary statistic t . . . . . . . . . . . . . .
Number of times baboon father helps own child . . . . . . . . . . .
Histogram of simulated values of w.tot . . . . . . . . . . . . . . . .
vii
.
.
.
.
.
.
.
.
.
.
.
.
.
103
107
110
112
114
118
119
122
123
124
125
128
129
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
130
134
137
138
141
143
146
149
152
157
160
162
169
171
172
173
176
179
184
185
186
190
191
LIST OF FIGURES
3.1
3.2
3.3
3.4
3.5
3.6
3.7
3.8
3.9
3.10
3.11
3.12
3.13
3.14
3.15
3.16
3.17
3.18
3.19
Four regression examples . . . . . . . . . . . . . . . . . . . . .
1970 draft lottery. Draft number vs. day of year . . . . . . . . .
Draft number vs. day of year with smoothers . . . . . . . . . . .
Total number of New seedlings 1993 – 1997, by quadrat. . . . .
Calorie content of hot dogs . . . . . . . . . . . . . . . . . . . .
Density estimates of calorie contents of hot dogs . . . . . . . . .
The PlantGrowth data . . . . . . . . . . . . . . . . . . . . . . .
Ice cream consumption versus mean temperature . . . . . . . .
Likelihood functions for (µ, δM , δP ) in the Hot Dog example. . .
pairs plot of the mtcars data . . . . . . . . . . . . . . . . . . .
mtcars — various plots . . . . . . . . . . . . . . . . . . . . . . .
likelihood functions for β1 , γ1 , δ1 and δ2 in the mtcars example.
Pine cones and O-rings . . . . . . . . . . . . . . . . . . . . . . .
Pine cones and O-rings with regression curves . . . . . . . . . .
Likelihood function for the pine cone data . . . . . . . . . . . .
Actual vs. fitted and residuals vs. fitted for the seedling data . .
Diagnostic plots for the seedling data . . . . . . . . . . . . . . .
Actual mpg and fitted values from three models . . . . . . . . .
Happiness Quotient of bankers and poets . . . . . . . . . . . . .
viii
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
203
206
207
209
211
213
215
222
228
230
233
235
238
239
242
247
249
251
256
4.1 The (X1 , X2 ) plane and the (Y1 , Y2 ) plane . . . . . . . . . . . . . . . . 270
4.2 pmf’s, pdf’s, and cdf’s . . . . . . . . . . . . . . . . . . . . . . . . . . 272
5.1
5.2
5.3
5.4
5.5
5.6
5.7
5.8
5.9
5.10
The Binomial pmf . . . . . . . . . . . . . . . . . . . . . . . . . . . .
The Negative Binomial pmf . . . . . . . . . . . . . . . . . . . . . .
Poisson pmf for λ = 1, 4, 16, 64 . . . . . . . . . . . . . . . . . . . . .
Rutherford and Geiger’s Figure 1 . . . . . . . . . . . . . . . . . . .
Numbers of firings of a neuron in 150 msec after five different tastants. Tastants: 1=MSG .1M; 2=MSG .3M; 3=NaCl .1M; 4=NaCl
.3M; 5=water. Panels: A: A stripchart. Each circle represents one
delivery of a tastant. B: A mosaic plot. C: Each line represents one
tastant. D: Likelihood functions. Each line represents one tastant.
The line shows Poisson probabilities for λ = 0.2; the circles show the
fraction of times the neuron responded with 0, 1, . . . , 5 spikes for
each of the five tastants. . . . . . . . . . . . . . . . . . . . . . . . .
Gamma densities . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Exponential densities . . . . . . . . . . . . . . . . . . . . . . . . . .
Beta densities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Water temperatures (◦ C) at 1000m depth . . . . . . . . . . . . . .
.
.
.
.
285
289
295
300
. 302
.
.
.
.
.
304
307
310
314
316
LIST OF FIGURES
ix
5.11 Bivariate Normal density . . . . . . . . . . . . . . . . . . . . . . . . . 323
5.12 Bivariate Normal density . . . . . . . . . . . . . . . . . . . . . . . . . 325
5.13 t densities for four degrees of freedom and the N(0, 1) density . . . . 333
6.1
6.2
6.3
6.4
6.5
6.6
6.7
6.8
Graphical representation of hierarchical model for fMRI
Some time series . . . . . . . . . . . . . . . . . . . . . .
Yt+1 vs. Yt for the Beaver and Presidents data sets . . . .
Yt+k vs. Yt for the Beaver data set and lags 0–5 . . . . .
coplot of Yt+1 ∼ Yt−1 | Yt for the Beaver data set . . . . .
Fit of CO2 data . . . . . . . . . . . . . . . . . . . . . . .
DAX closing prices . . . . . . . . . . . . . . . . . . . . .
DAX returns . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
343
345
347
348
350
352
354
356
7.1 The Be(.39, .01) density . . . . . . . . . . . . . . . . . . . . . . . . . . 370
7.2 Densities of Ȳin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372
7.3 Densities of Zin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373
L IST
OF
TABLES
1.1 Party Affiliation and Referendum Support . . . . . . . . . . . . . . . 42
1.2 Steroid Use and Test Results . . . . . . . . . . . . . . . . . . . . . . 44
2.1 New and Old seedlings in quadrat 6 in 1992 and 1993 . . . . . . . . 150
3.1 Correspondence between Models 3.3 and 3.4 . . . . . . . . . . . . . 215
3.2 β’s for Figure 3.14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240
5.1 Rutherford and Geiger’s data . . . . . . . . . . . . . . . . . . . . . . 299
x
P REFACE
This book is intended as an upper level undergraduate or introductory graduate
textbook in statistical thinking with a likelihood emphasis for students with a good
knowledge of calculus and the ability to think abstractly. By “statistical thinking” is
meant a focus on ideas that statisticians care about as opposed to technical details
of how to put those ideas into practice. By “likelihood emphasis” is meant that the
likelihood function and likelihood principle are unifying ideas throughout the text.
Another unusual aspect is the use of statistical software as a pedagogical tool. That
is, instead of viewing the computer merely as a convenient and accurate calculating
device, we use computer calculation and simulation as another way of explaining
and helping readers understand the underlying concepts.
Our software of choice is R (R Development Core Team [2006]). R and accompanying manuals are available for free download from http://www.r-project.
org. You may wish to download An Introduction to R to keep as a reference. It
is highly recommended that you try all the examples in R. They will help you understand concepts, give you a little programming experience, and give you facility
with a very flexible statistical software package. And don’t just try the examples
as written. Vary them a little; play around with them; experiment. You won’t hurt
anything and you’ll learn a lot.
xi
C HAPTER 1
P ROBABILITY
1.1
Basic Probability
Let X be a set and F a collection of subsets of X . A probability measure, or just a
probability, on (X , F) is a function µ : F → [0, 1]. In other words, to every set in F,
µ assigns a probability between 0 and 1. We call µ a set function because its domain
is a collection of sets. But not just any set function will do. To be a probability µ
must satisfy
1. µ(∅) = 0 (∅ is the empty set.),
2. µ(X ) = 1, and
3. if A1 and A2 are disjoint then µ(A1 ∪ A2 ) = µ(A1 ) + µ(A2 ).
One can show that property 3 holds for any finite collection of disjoint sets, not just
two; see Exercise 1. It is common practice, which we adopt in this text, to assume
more — that property 3 also holds for any countable collection of disjoint sets.
When X is a finite or countably infinite set (usually integers) then µ is said to
be a discrete probability. When X is an interval, either finite or infinite, then µ
is said to be a continuous probability. In the discrete case, F usually contains all
possible subsets of X . But in the continuous case, technical complications prohibit
F from containing all possible subsets of X . See Casella and Berger [2002] or
Schervish [1995] for details. In this text we deemphasize the role of F and speak
of probability measures on X without mentioning F.
In practical examples X is the set of outcomes of an “experiment” and µ is determined by experience, logic or judgement. For example, consider rolling a six-sided
die. The set of outcomes is {1, 2, 3, 4, 5, 6} so we would assign X ≡ {1, 2, 3, 4, 5, 6}.
1
1.1. BASIC PROBABILITY
2
If we believe the die to be fair then we would also assign µ({1}) = µ({2}) = · · · =
µ({6}) = 1/6. The laws of probability then imply various other values such as
µ({1, 2}) = 1/3
µ({2, 4, 6}) = 1/2
etc.
Often we omit the braces and write µ(2), µ(5), etc. Setting µ(i) = 1/6 is not
automatic simply because a die has six faces. We set µ(i) = 1/6 because we believe
the die to be fair.
We usually use the word “probability” or the symbol P in place of µ. For example, we would use the following phrases interchangeably:
• The probability that the die lands 1
• P(1)
• P[the die lands 1]
• µ({1})
We also use the word distribution in place of probability measure.
The next example illustrates how probabilities of complicated events can be
calculated from probabilities of simple events.
Example 1.1 (The Game of Craps)
Craps is a gambling game played with two dice. Here are the rules, as explained on the
website www.online-craps-gambling.com/craps-rules.html.
For the dice thrower (shooter) the object of the game is to throw a 7 or
an 11 on the first roll (a win) and avoid throwing a 2, 3 or 12 (a loss). If
none of these numbers (2, 3, 7, 11 or 12) is thrown on the first throw (the
Come-out roll) then a Point is established (the point is the number rolled)
against which the shooter plays. The shooter continues to throw until one
of two numbers is thrown, the Point number or a Seven. If the shooter rolls
the Point before rolling a Seven he/she wins, however if the shooter throws
a Seven before rolling the Point he/she loses.
Ultimately we would like to calculate P(shooter wins). But for now, let’s just calculate
P(shooter wins on Come-out roll) = P(7 or 11) = P(7) + P(11).
1.1. BASIC PROBABILITY
3
Using the language of page 1, what is X in this case? Let d1 denote the number showing
on the first die and d2 denote the number showing on the second die. d1 and d2 are
integers from 1 to 6. So X is the set of ordered pairs (d1 , d2 ) or
(6, 6)
(5, 6)
(4, 6)
(3, 6)
(2, 6)
(1, 6)
(6, 5)
(5, 5)
(4, 5)
(3, 5)
(2, 5)
(1, 5)
(6, 4)
(5, 4)
(4, 4)
(3, 4)
(2, 4)
(1, 4)
(6, 3)
(5, 3)
(4, 3)
(3, 3)
(2, 3)
(1, 3)
(6, 2)
(5, 2)
(4, 2)
(3, 2)
(2, 2)
(1, 2)
(6, 1)
(5, 1)
(4, 1)
(3, 1)
(2, 1)
(1, 1)
If the dice are fair, then the pairs are all equally likely. Since there are 36 of them, we
assign P(d1 , d2 ) = 1/36 for any combination (d1 , d2 ). Finally, we can calculate
P(7 or 11) = P(6, 5) + P(5, 6) + P(6, 1) + P(5, 2)
+ P(4, 3) + P(3, 4) + P(2, 5) + P(1, 6) = 8/36 = 2/9.
The previous calculation uses desideratum 3 for probability measures. The different pairs
(6, 5), (5, 6), . . . , (1, 6) are disjoint, so the probability of their union is the sum of their
probabilities.
Example 1.1 illustrates a common situation. We know the probabilities of some
simple events like the rolls of individual dice, and want to calculate the probabilities of more complicated events like the success of a Come-out roll. Sometimes
those probabilities can be calculated mathematically as in the example. Other times
it is more convenient to calculate them by computer simulation. We frequently use
R to calculate probabilities. To illustrate, Example 1.2 uses R to calculate by simulation the same probability we found directly in Example 1.1.
Example 1.2 (Craps, continued)
To simulate the game of craps, we will have to simulate rolling dice. That’s like randomly
sampling an integer from 1 to 6. The sample() command in R can do that. For example,
the following snippet of code generates one roll from a fair, six-sided die and shows R’s
response:
> sample(1:6,1)
[1] 1
>
When you start R on your computer, you see >, R’s prompt. Then you can type a command
such as sample(1:6,1) which means “take a sample of size 1 from the numbers 1 through
1.1. BASIC PROBABILITY
4
6”. (It could have been abbreviated sample(6,1).) R responds with [1] 1. The [1]
says how many calculations R has done; you can ignore it. The 1 is R’s answer to the
sample command; it selected the number “1”. Then it gave another >, showing that it’s
ready for another command. Try this several times; you shouldn’t get “1” every time.
Here’s a longer snippet that does something more useful.
> x <- sample ( 6, 10, replace=T ) # take a sample of
# size 10 and call it x
> x # print the ten values
[1] 6 4 2 3 4 4 3 6 6 2
> sum ( x == 3 ) # how many are equal to 3?
[1] 2
>
Note
• # is the comment character. On each line, R ignores all text after #.
• We have to tell R to take its sample with replacement. Otherwise, when R selects
“6” the first time, “6” is no longer available to be sampled a second time. In
replace=T, the T stands for True.
• <- does assignment. I.e., the result of sample ( 6, 10, replace=T ) is assigned to a variable called x. The assignment symbol is two characters: < followed
by -.
• A variable such as x can hold many values simultaneously. When it does, it’s called
a vector. You can refer to individual elements of a vector. For example, x[1] is
the first element of x. x[1] turned out to be 6; x[2] turned out to be 4; and so
on.
• == does comparison. In the snippet above, (x==3) checks, for each element of x,
whether that element is equal to 3. If you just type x == 3 you will see a string
of T’s and F’s (True and False), one for each element of x. Try it.
• The sum command treats T as 1 and F as 0.
• R is almost always tolerant of spaces. You can often leave them out or add extras
where you like.
1.1. BASIC PROBABILITY
5
On average, we expect 1/6 of the draws to equal 1, another 1/6 to equal 2, and so on.
The following snippet is a quick demonstration. We simulate 6000 rolls of a die and
expect about 1000 1’s, 1000 2’s, etc. We count how many we actually get. This snippet
also introduces the for loop, which you should try to understand now because it will be
extremely useful in the future.
> x <- sample(6,6000,replace=T)
> for ( i in 1:6 ) print ( sum ( x==i ))
[1] 995
[1] 1047
[1] 986
[1] 1033
[1] 975
[1] 964
>
Each number from 1 through 6 was chosen about 1000 times, plus or minus a little bit
due to chance variation.
Now let’s get back to craps. We want to simulate a large number of games, say 1000.
For each game, we record either 1 or 0, according to whether the shooter wins on the
Come-out roll, or not. We should print out the number of wins at the end. So we start
with a code snippet like this:
# make a vector of length 1000, filled with 0’s
wins <- rep ( 0, 1000 )
for ( i in 1:1000 ) {
simulate a Come-out roll
if shooter wins on Come-out, wins[i] <- 1
}
sum ( wins ) # print the number of wins
Now we have to figure out how to simulate the Come-out roll and decide whether the
shooter wins. Clearly, we begin by simulating the roll of two dice. So our snippet expands
to
1.2. PROBABILITY DENSITIES
6
# make a vector of length 1000, filled with 0’s
wins <- rep ( 0, 1000 )
for ( i in 1:1000 ) {
d <- sample ( 1:6, 2, replace=T )
if ( sum(d) == 7 || sum(d) == 11 ) wins[i] <- 1
}
sum ( wins ) # print the number of wins
The “||” stands for “or”. So that line of code sets wins[i] <- 1 if the sum of the
rolls is either 7 or 11. When I ran this simulation R printed out 219. The calculation in
Example 1.1 says we should expect around (2/9) × 1000 ≈ 222 wins. Our calculation
and simulation agree about as well as can be expected from a simulation. Try it yourself
a few times. You shouldn’t always get 219. But you should get around 222 plus or minus
a little bit due to the randomness of the simulation.
Try out these R commands in the version of R installed on your computer. Make sure
you understand them. If you don’t, print out the results. Try variations. Try any tricks
you can think of to help you learn R.
1.2
Probability Densities
So far we have dealt with discrete probabilities, or the probabilities of at most a
countably infinite number of outcomes. For discrete probabilities, X is usually a
set of integers, either finite or infinite. Section 1.2 deals with the case where X is
an interval, either of finite or infinite length. Some examples are
Medical trials the time until a patient experiences a relapse
Sports the length of a javelin throw
Ecology the lifetime of a tree
Manufacturing the diameter of a ball bearing
Computing the amount of time a Help Line customer spends on hold
Physics the time until a uranium atom decays
Oceanography the temperature of ocean water at a specified latitude, longitude
and depth
1.2. PROBABILITY DENSITIES
7
p(y)
Probabilities for such outcomes are called continuous. For example, let Y be the
time a Help Line caller spends on hold. The random variable Y is often modelled
with a density similar to that in Figure 1.1.
y
Figure 1.1: pdf for time on hold at Help Line
The curve in the figure is a probability density function or pdf. The pdf is large
near y = 0 and monotonically decreasing, expressing the idea that smaller values
of y are more likely than larger values. (Reasonable people may disagree about
whether this pdf accurately represents callers’ experience.) We typically use the
symbols p, π or f for pdf’s. We would write p(50), π(50) or f (50) to denote the
height of the curve at y = 50. For a pdf, probability is the same as area under the
curve. For example, the probability that a caller waits less than 60 minutes is
Z
P[Y < 60] =
p(t) dt.
0
Every pdf must satisfy two properties.
1. p(y) ≥ 0 for all y.
2.
R∞
−∞
p(y) dy = 1.
60
1.2. PROBABILITY DENSITIES
8
The first property holds because, if p(y) < 0 on the interval (a, b) then P[Y ∈
Rb
(a, b)] = a p(y) dy < 0; and we can’t haveRprobabilities less than 0. The second
∞
property holds because P[Y ∈ (−∞, ∞)] = −∞ p(y) dy = 1.
One peculiar fact about any continuous random variable Y is that P[Y = a] = 0,
for every a ∈ R. That’s because
Z a+
P[Y = a] = lim P[Y ∈ [a, a + ]] = lim
pY (y) dy = 0.
→0
→0
a
Consequently, for any numbers a < b,
P[Y ∈ (a, b)] = P[Y ∈ [a, b)] = P[Y ∈ (a, b]] = P[Y ∈ [a, b]].
The use of “density” in statistics is entirely analagous to its use in physics. In
both fields
mass
density =
(1.1)
volume
In statistics, we interpret density as probability density, mass as probability mass
and volume as length of interval. In both fields, if the density varies from place to
place (In physics it would vary within an object; in statistics it would vary along
the real line.) then the density at a particular location is the limit of Equation 1.1
as volume → 0.
Probability density functions are derivatives of probabilities. For any fixed number a
Z
d b
d
P[X ∈ (a, b]] =
fX (x) dx = fX (b).
(1.2)
db
db a
Similarly, d/da P[X ∈ (a, b]] = −fX (a).
Sometimes we can specify pdf’s for continuous random variables based on the
logic of the situation, just as we could specify discrete probabilities based on the
logic of dice rolls. For example, let Y be the outcome of a spinner that is marked
from 0 to 1. Then Y will be somewhere in the unit interval, and all parts of the
interval are equally likely. So the pdf pY must look like Figure 1.2.
Figure 1.2 was produced by the following snippet.
plot ( c(0,1), c(1,1), xlab="y", ylab="p(y)",
ylim=c(0,1.1), type="l" )
Note:
9
0.0 0.4 0.8
p(y)
1.2. PROBABILITY DENSITIES
0.0
0.2
0.4
0.6
0.8
1.0
y
Figure 1.2: pY for the outcome of a spinner
• c(0,1) collects 0 and 1 and puts them into the vector (0,1). Likewise, c(1,1)
creates the vector (1,1).
• plot(x,y,...) produces a plot. The plot(c(0,1), c(1,1), ...) command above plots the points (x[1],y[1]) = (0,1) and (x[2],y[2]) = (1,1).
• type="l" says to plot a line instead of individual points.
• xlab and ylab say how the axes are labelled.
• ylim=c(0,1.1) sets the limits of the y-axis on the plot. If ylim is not specified
then R sets the limits automatically. Limits on the x-axis can be specified with
xlim.
At other times we use probability densities and distributions as models for data,
and estimate the densities and distributions directly from the data. Figure 1.3
shows how that works. The upper panel of the figure is a histogram of 112 measurements of ocean temperature at a depth of 1000 meters in the North Atlantic
near 45◦ North latitude and 20◦ degrees West longitude. Example 1.5 will say
more about the data. Superimposed on the histogram is a pdf f . We think of f as
1.2. PROBABILITY DENSITIES
10
underlying the data. The idea is that measuring a temperature at that location is
like randomly drawing a value from f . The 112 measurements, which are spread
out over about a century of time, are like 112 independent draws from f . Having
the 112 measurements allows us to make a good estimate of f . If oceanographers
return to that location to make additional measurements, it would be like making additional draws from f . Because we can estimate f reasonably well, we can
predict with some degree of assurance what the future draws will be like.
The bottom panel of Figure 1.3 is a histogram of the discoveries data set
that comes with R and which is, as R explains, “The numbers of ‘great’ inventions
and scientific discoveries in each year from 1860 to 1959.” It is overlaid with a
line showing the Poi(3.1) distribution. (Named distributions will be introduced in
Section 1.3.) It seems that the number of great discoveries each year follows the
Poi(3.1) distribution, at least approximately. If we think the future will be like the
past then we should expect future years to follow a similar pattern. Again, we
think of a distribution underlying the data. The number of discoveries in a single
year is like a draw from the underlying distribution. The figure shows 100 years,
which allow us to estimate the underlying distribution reasonably well.
Figure 1.3 was produced by the following snippet.
par ( mfrow=c(2,1) )
good <- abs ( med.1000$lon + 20 ) < 1 &
abs ( med.1000$lat - 45 ) < 1
hist ( med.1000$temp[good], xlab="temperature", ylab="",
main="", prob=T, xlim=c(5,11) )
m <- mean ( med.1000$temp[good] )
s <- sqrt ( var ( med.1000$temp[good] ) )
x <- seq ( 5, 11, length=40 )
lines ( density(med.1000$temp[good]) )
hist ( discoveries, xlab="discoveries", ylab="", main="",
prob=T, breaks=seq(-.5,12.5,by=1) )
lines ( 0:12, dpois(0:12, 3.1), type="b" )
Note:
• par sets R’s graphical parameters. mfrow=c(2,1) tells R to make an array of
multiple figures in a 2 by 1 layout.
11
0.0
0.2
0.4
1.2. PROBABILITY DENSITIES
5
6
7
8
9
10
11
0.00
0.10
0.20
temperature
0
2
4
6
8
10
12
discoveries
Figure 1.3: (a): Ocean temperatures at 1000m depth near 45◦ N latitude, -20◦
longitude; (b) Numbers of important discoveries each year 1860–1959
1.2. PROBABILITY DENSITIES
12
• med.1000 is a data set of North Atlantic ocean temperatures at a depth of
1000 meters. med.1000$lon and med.1000$lat are the longitude and latitude
of the measurements. med.1000$temp are the actual temperatures.
• abs stands for absolute value.
• good <- ... calls those points good whose longitude is between -19 and -21
and whose latitude is between 44 and 46.
• hist() makes a histogram. prob=T turns the y-axis into a probability scale
(area under the histogram is 1) instead of counts.
• mean() calculates the mean. var() calculates the variance. Section 1.4 defines the mean and variance of distributions. Section 2.2.1 defines the mean
and variance of data sets.
• lines() adds lines to an existing plot.
• density() estimates a density from a data set.
It is often necessary to transform one variable into another as, for example, Z =
g(X) for some specified function g. We might know pX (The subscript indicates
which random variable we’re talking about.) and want to calculate pZ . Here we
consider only monotonic functions g, so there is an inverse X = h(Z).
Theorem 1.1. Let X be a random variable with pdf pX . Let g be a differentiable,
monotonic, invertible function and define Z = g(X). Then the pdf of Z is
−1 d g (t) pZ (t) = pX (g −1 (t)) dt Proof. If g is an increasing function then
pZ (b) =
d
d
P[Z ∈ (a, b]] =
P[X ∈ (g −1 (a), g −1 (b)]]
db
db
Z −1
d g (b)
d g −1 (t) =
pX (x) dx =
× pX (g −1 (b))
db g−1 (a)
d t b
The proof when g is decreasing is left as an exercise.
1.2. PROBABILITY DENSITIES
13
To illustrate, suppose that X is a random variable with pdf pX (x) = 2x on the
unit interval. Let Z = 1/X. What is pZ (z)? The inverse transformation is X = 1/Z.
Its derivative is dx/dz = −z −2 . Therefore,
−1 d g (z) 2 1 −1
= − = 2
pZ (z) = pX (g (z)) d z z z2 z3
And the possible values of Z are from 1 to ∞. So pZ (z) = 2/z 3 on the interval
(1, ∞). As a partial check, we can verify that the integral is 1.
∞
Z ∞
2
1 dz = − 2 = 1.
z3
z 1
1
Theorem 1.1 can be explained by Figure 1.4. The figure shows an x, a z, and
the function z = g(x). A little interval is shown around x; call it Ix . It gets mapped
by g into a little interval around z; call it Iz . The density is
pZ (z) ≈
P[X ∈ Ix ] length(Ix )
P[Z ∈ Iz ]
=
≈ pX (x) |h0 (z)|
length(Iz )
length(Ix ) length(Iz )
(1.3)
The approximations in Equation 1.3 are exact as the lengths of Ix and Iz decrease
to 0.
If g is not one-to-one, then it is often possible to find subsets of R on which g is
one-to-one, and work separately on each subset.
Z=g(X)
z
x
Figure 1.4: Change of variables
1.3. PARAMETRIC FAMILIES OF DISTRIBUTIONS
1.3
14
Parametric Families of Distributions
Probabilities often depend on one or more unknown numerical constants. Suppose,
for example, that we have a biased coin. Let θ be the chance that it lands H. Then
P(H) = θ; but we might not know θ; it is an unknown numerical constant. In this
case we have a family of probability measures, one for each value of θ, and we don’t
know which one is right. When we need to be explicit that probabilities depend
on θ, we use the notation, for example, P(H | θ) or P(H | θ = 1/3). The vertical bar
is read “given” or “given that”. So P(H | θ = 1/3) is read “the probability of Heads
given that θ equals 1/3” and P(H | θ) is read “the probability of Heads given θ.”
This notation means
P(H | θ = 1/3) = 1/3,
P(T | θ = 1/3) = 2/3,
P(T | θ = 1/5) = 4/5
and so on. Instead of “given” we also use the word “conditional”. So we would say
“the probability of Heads conditional on θ”, etc.
The unknown constant θ is called a parameter. The set of possible values for θ
is denoted Θ (upper case θ). For each θ there is a probability measure µθ . The set
of all possible probability measures (for the problem at hand),
{µθ : θ ∈ Θ},
is called a parametric family of probability measures. The rest of this chapter introduces four of the most useful parametric families of probability measures.
1.3.1
The Binomial Distribution
Statisticians often have to consider observations of the following type.
• A repeatable event results in either a success or a failure.
• Many repetitions are observed.
• Successes and failures are counted.
• The number of successes helps us learn about the probability of success.
Such observations are called binomial. Some examples are
1.3. PARAMETRIC FAMILIES OF DISTRIBUTIONS
15
Medical trials A new treatment is given to many patients. Each is either cured or
not.
Toxicity tests Many laboratory animals are exposed to a potential carcinogen.
Each either develops cancer or not.
Ecology Many seeds are planted. Each either germinates or not.
Quality control Many supposedly identical items are subjected to a test. Each
either passes or not.
Because binomial experiments are so prevalent there is specialized language to
describe them. Each repetition is called a trial; the number of trials is usually
denoted N ; the unknown probability of success is usually denoted either p or θ;
the number of successes is usually denoted X. We write X ∼ Bin(N, p). The
symbol “∼” is read is distributed as; we would say “X is distributed as Binomial N
p” or “X has the Binomial N, p distribution”. Some important assumptions about
binomial experiments are that N is fixed in advance, θ is the same for every trial,
and the outcome of any trial does not influence the outcome of any other trial.
When N = 1 we say X has a Bernoulli(θ) distribution and write X ∼ Bern(θ); the
individual trials in a binomial experiment are called Bernoulli trials.
When a binomial experiment is performed, X will turn out to be one of the
integers from 0 to N . We need to know the associated probabilities; i.e. P[X = k | θ]
for each value of k from 0 to N . These probabilities are given by Equation 1.4
whose derivation is given in Section 5.1.
N k
P[X = k | θ] =
θ (1 − θ)N −k
(1.4)
k
!
The term Nk is called a binomial coefficient and is read “N choose k”. Nk = k!(NN−k)!
and is equal to the number of subsets of size k that can be formed from a group of
N distinct items. In case k = 0 or k = N , 0! is defined to be 1. Figure 1.5 shows
binomial probabilities for N ∈ {3, 30, 300} and p ∈ {.1, .5, .9}.
Example 1.3 (Craps, continued)
This example continues the game of craps. See Examples 1.1 and 1.2.
What is the probability that at least one of the next four players wins on his Come-out
roll?
This is a Binomial experiment because
1. We are looking at repeated trials. Each Come-out roll is a trial. It results in either
success, or not.
1.3. PARAMETRIC FAMILIES OF DISTRIBUTIONS
2
1
2
0.6
0.0
probability
0
3
0
1
2
x
N = 30
p = 0.1
N = 30
p = 0.5
N = 30
p = 0.9
30
0
10
0.00
probability
0.00
probability
10
30
0
10
30
N = 300
p = 0.1
N = 300
p = 0.5
N = 300
p = 0.9
200
0.00
probability
0.00
0.06
x
0
0.06
x
0.04
x
probability
x
200
3
0.20
x
0.15
x
0.00
0
0.35
3
0.20
0
N=3
p = 0.9
0.15
probability
0.6
1
0.00
probability
0
probability
N=3
p = 0.5
0.0
probability
N=3
p = 0.1
16
0
x
Figure 1.5: Binomial probabilities
200
x
1.3. PARAMETRIC FAMILIES OF DISTRIBUTIONS
17
2. The outcome of one trial does not affect the other trials.
3. We are counting the number of successes.
Let X be the number of successes. There are four trials, so N = 4. We calculated the
probability of success in Example 1.1; it’s p = 2/9. So X ∼ Bin(4, 2/9). The probability
of success in at least one Come-out roll is
P[success in at least one Come-out roll] = P[X ≥ 1]
4
4 X
X
4
=
P[X = i] =
(2/9)i (7/9)4−i ≈ 0.634 (1.5)
i
i=1
i=1
A convenient way to re-express Equation 1.5 is
P[X ≥ 1] = 1 − P[X = 0],
which can be quickly calculated in R. The dbinom() command computes Binomial
probabilities. To compute Equation 1.5 we would write
1 - dbinom(0,4,2/9)
The 0 says what value of X we want. The 4 and the 2/9 are the number of trials
and the probability of success. Try it. Learn it.
1.3.2
The Poisson Distribution
Another common type of observation occurs in the following situation.
• There is a domain of study, usually a block of space or time.
• Events arise seemingly at random in the domain.
• There is an underlying rate at which events arise.
Such observations are called Poisson after the 19th century French mathematician
Siméon-Denis Poisson. The number of events in the domain of study helps us learn
about the rate. Some examples are
Ecology Tree seedlings emerge from the forest floor.
Computer programming Bugs occur in computer code.
1.3. PARAMETRIC FAMILIES OF DISTRIBUTIONS
18
Quality control Defects occur along a strand of yarn.
Genetics Mutations occur in a genome.
Traffic flow Cars arrive at an intersection.
Customer service Customers arrive at a service counter.
Neurobiology Neurons fire.
The rate at which events occur is often called λ; the number of events that occur in
the domain of study is often called X; we write X ∼ Poi(λ). Important assumptions
about Poisson observations are that two events cannot occur at exactly the same
location in space or time, that the occurence of an event at location `1 does not
influence whether an event occurs at any other location `2 , and the rate at which
events arise does not vary over the domain of study.
When a Poisson experiment is observed, X will turn out to be a nonnegative
integer. The associated probabilities are given by Equation 1.6.
P[X = k | λ] =
λk e−λ
.
k!
(1.6)
One of the main themes of statistics is the quantitative way in which data help
us learn about the phenomenon we are studying. Example 1.4 shows how this
works when we want to learn about the rate λ of a Poisson distribution.
Example 1.4 (Seedlings in a Forest)
Tree populations move by dispersing their seeds. Seeds become seedlings, seedlings become saplings, and saplings become adults which eventually produce more seeds. Over
time, whole populations may migrate in response to climate change. One instance occurred at the end of the Ice Age when species that had been sequestered in the south
were free to move north. Another instance may be occurring today in response to global
warming. One critical feature of the migration is its speed. Some of the factors determining the speed are the typical distances of long range seed dispersal, the proportion
of seeds that germinate and emerge from the forest floor to become seedlings, and the
proportion of seedlings that survive each year.
To learn about emergence and survival, ecologists return annually to forest quadrats
(square meter sites) to count seedlings that have emerged since the previous year. One
such study was reported in Lavine et al. [2002]. A fundamental quantity of interest is
the rate λ at which seedlings emerge. Suppose that, in one quadrat, three new seedlings
are observed. What does that say about λ?
1.3. PARAMETRIC FAMILIES OF DISTRIBUTIONS
19
Different values of λ yield different values of P[X = 3 | λ]. To compare different values
of λ we see how well each one explains the data X = 3; i.e., we compare P[X = 3 | λ]
for different values of λ. For example,
P[X = 3 | λ = 1] =
P[X = 3 | λ = 2] =
P[X = 3 | λ = 3] =
P[X = 3 | λ = 4] =
13 e−1
3!
23 e−2
3!
33 e−3
3!
3 −4
4e
3!
≈ 0.06
≈ 0.18
≈ 0.22
≈ 0.14
0.00 0.10 0.20
P[x=3]
In other words, the value λ = 3 explains the data almost four times as well as the
value λ = 1 and just a little bit better than the values λ = 2 and λ = 4. Figure 1.6
shows P[X = 3 | λ] plotted as a function of λ. The figure suggests that P[X = 3 | λ] is
maximized by λ = 3. The suggestion can be verified by differentiating Equation 1.6 with
respect to lambda, equating to 0, and solving. The figure also shows that any value of
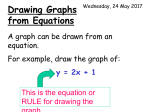
λ from about 0.5 to about 9 explains the data not too much worse than λ = 3.
0
2
4
6
8
lambda
Figure 1.6: P[X = 3 | λ] as a function of λ
10
1.3. PARAMETRIC FAMILIES OF DISTRIBUTIONS
20
Figure 1.6 was produced by the following snippet.
lam <- seq ( 0, 10, length=50 )
y <- dpois ( 3, lam )
plot ( lam, y, xlab="lambda", ylab="P[x=3]", type="l" )
Note:
• seq stands for “sequence”. seq(0,10,length=50) produces a sequence of 50
numbers evenly spaced from 0 to 10.
• dpois calculates probabilities for Poisson distributions the way dbinom does
for Binomial distributions.
• plot produces a plot. In the plot(...) command above, lam goes on the
x-axis, y goes on the y-axis, xlab and ylab say how the axes are labelled, and
type="l" says to plot a line instead of indvidual points.
Making and interpreting plots is a big part of statistics. Figure 1.6 is a good
example. Just by looking at the figure we were able to tell which values of λ are
plausible and which are not. Most of the figures in this book were produced in R.
1.3.3
The Exponential Distribution
It is often necessary to model a continuous random variable X whose density decreases away from 0. Some examples are
Customer service time on hold at a help line
Neurobiology time until the next neuron fires
Seismology time until the next earthquake
Medicine remaining years of life for a cancer patient
Ecology dispersal distance of a seed
In these examples it is expected that most calls, times or distances will be short
and a few will be long. So the density should be large near x = 0 and decreasing
1.3. PARAMETRIC FAMILIES OF DISTRIBUTIONS
21
as x increases. A useful pdf for such situations is the Exponential density
p(x) =
1 −x
e λ
λ
for x > 0.
(1.7)
10
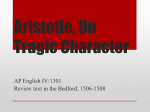
We say X has an exponential distribution with parameter λ and write X ∼ Exp(λ).
Figure 1.7 shows exponential densities for several different values of λ.
0
2
4
p(x)
6
8
lambda = 2
lambda = 1
lambda = 0.2
lambda = 0.1
0.0
0.5
1.0
1.5
2.0
x
Figure 1.7: Exponential densities
Figure 1.7 was produced by the following snippet.
x <- seq ( 0, 2, length=40 ) # 40 values from 0 to 2
lam <- c ( 2, 1, .2, .1 )
# 4 different values of lambda
y <- matrix ( NA, 40, 4 )
# y values for plotting
1.3. PARAMETRIC FAMILIES OF DISTRIBUTIONS
22
for ( i in 1:4 )
y[,i] <- dexp ( x, 1/lam[i] ) # exponential pdf
matplot ( x, y, type="l", xlab="x", ylab="p(x)", col=1 )
legend ( 1.2, 10, paste ( "lambda =", lam ),
lty=1:4, cex=.75 )
• We want to plot the exponential density for several different values of λ so
we choose 40 values of x between 0 and 2 at which to do the plotting.
• Next we choose 4 values of λ.
• Then we need to calculate and save p(x) for each combination of x and λ.
We’ll save them in a matrix called y. matrix(NA,40,4) creates the matrix.
The size of the matrix is 40 by 4. It is filled with NA, or Not Available.
• dexp calculates the exponential pdf. The argument x tells R the x values at
which to calculate the pdf. x can be a vector. The argument 1/lam[i] tells R
the value of the parameter. R uses a different notation than this book. Where
this book says Exp(2), R says Exp(.5). That’s the reason for the 1/lam[i].
• matplot plots one matrix versus another. The first matrix is x and the second
is y. matplot plots each column of y against each column of x. In our case x
is vector, so matplot plots each column of y, in turn, against x. type="l" says
to plot lines instead of points. col=1 says to use the first color in R’s library
of colors.
• legend (...) puts a legend on the plot. The 1.2 and 10 are the x and y
coordinates of the upper left corner of the legend box. lty=1:4 says to use
line types 1 through 4. cex=.75 sets the character expansion factor to .75. In
other words, it sets the font size.
• paste(..) creates the words that go into the legend. It pastes together
"lambda =" with the four values of lam.
1.3.4
The Normal Distribution
It is often necessary to model a continuous random variable Y whose density is
mound-shaped. Some examples are
1.3. PARAMETRIC FAMILIES OF DISTRIBUTIONS
23
Biological Anthropology Heights of people
Oceanography Ocean temperatures at a particular location
Quality Control Diameters of ball bearings
Education SAT scores
In each case the random variable is expected to have a central value around which
most of the observations cluster. Fewer and fewer observations are farther and
farther away from the center. So the pdf should be unimodal — large in the center
and decreasing in both directions away from the center. A useful pdf for such
situations is the Normal density
p(y) = √
1 y−µ 2
1
e− 2 ( σ ) .
2πσ
(1.8)
We say Y has a Normal distribution with mean µ and standard deviation σ and write
Y ∼ N(µ, σ). Figure 1.8 shows Normal densities for several different values of
(µ, σ). As illustrated by the figure, µ controls the center of the density; each pdf is
centered over its own value of µ. On the other hand, σ controls the spread. pdf’s
with larger values of σ are more spread out; pdf’s with smaller σ are tighter.
Figure 1.8 was produced by the following snippet.
x <- seq ( -6, 6, len=100 )
y <- cbind ( dnorm ( x, -2, 1 ),
dnorm ( x, 0, 2 ),
dnorm ( x, 0, .5 ),
dnorm ( x, 2, .3 ),
dnorm ( x, -.5, 3 )
)
matplot ( x, y, type="l", col=1 )
legend ( -6, 1.3, paste( "mu =", c(-2,0,0,2,-.5),
"; sigma =", c(1,2,.5,.3,3) ),
lty=1:5, col=1, cex=.75 )
• dnorm(...) computes the Normal pdf. The first argument is the set of x
values; the second argument is the mean; the third argument is the standard
deviation.
1.3. PARAMETRIC FAMILIES OF DISTRIBUTIONS
24
0.0
0.2
0.4
0.6
y
0.8
1.0
1.2
mu = !2 ; sigma = 1
mu = 0 ; sigma = 2
mu = 0 ; sigma = 0.5
mu = 2 ; sigma = 0.3
mu = !0.5 ; sigma = 3
!6
!4
!2
0
2
x
Figure 1.8: Normal densities
4
6
1.3. PARAMETRIC FAMILIES OF DISTRIBUTIONS
25
0.4
0.2
0.0
density
0.6
As a further illustration, Figure 1.9 shows a histogram of 105 ocean temperatures (◦ C) recorded in the Atlantic Ocean from about 1938 to 1997 at a depth of
1000 meters, near 45 degrees North latitude and 30 degrees West longitude. The
N(5.87, .72) density is superimposed on the histogram. The Normal density represents the data moderately well. We will study ocean temperatures in much more
detail in a series of examples beginning with Example 1.5.
4.0
4.5
5.0
5.5
6.0
6.5
7.0
7.5
temperature
Figure 1.9: Ocean temperatures at 45◦ N, 30◦ W, 1000m depth. The N(5.87, .72)
density.
Figure 1.9 was produced by
hist ( y, prob=T, xlab="temperature", ylab="density",
ylim=c(0,.6), main="" )
1.3. PARAMETRIC FAMILIES OF DISTRIBUTIONS
26
t <- seq ( 4, 7.5, length=40 )
lines ( t, dnorm ( t, mean(y), sd(y) ) )
• The 105 temperatures are in a vector y.
• hist produces a histogram. The argument prob=T causes the vertical scale to
be probability density instead of counts.
• The line t <- ... sets 40 values of t in the interval [4, 7.5] at which to
evaluate the Normal density for plotting purposes.
• lines displays the Normal density.
As usual, you should try to understand the R commands.
The function rnorm(n,mu,sig) generates a random sample from a Normal distribution. n is the sample size; mu is the mean; and sig is the standard deviation.
To demonstrate, we’ll generate a sample of size 100 from the N(5.87, .72) density,
the density in Figure 1.9, and compare the sample histogram to the theoretical
density. Figure 1.10(a) shows the comparison. It shows about how good a fit can
be expected between a histogram and the Normal density, for a sample of size
around 100 in the most ideal case when the sample was actually generated from
the Normal distribution. It is interesting to consider whether the fit in Figure 1.9 is
much worse.
Figure 1.10(a) was produced by
samp <- rnorm ( 100, 5.87, .72 )
y.vals <- seq ( 4, 7.5, length=40 )
hist ( samp, prob=T, main="(a)",
xlim=c(4,7.5), xlab="degrees C",
ylim=c(0,.6), ylab="density" )
lines ( y.vals, dnorm(y.vals,5.87,.72) )
When working with Normal distributions it is extremely useful to think in terms
of units of standard deviation, or simply standard units. One standard unit equals
one standard deviation. In Figure 1.10(a) the number 6.6 is about 1 standard
1.3. PARAMETRIC FAMILIES OF DISTRIBUTIONS
27
0.4
0.2
0.0
density
0.6
(a)
4.0
4.5
5.0
5.5
6.0
6.5
7.0
7.5
degrees C
0.15
0.00
density
0.30
(b)
39
40
41
42
43
44
45
degrees F
0.4
0.0
density
0.8
(c)
!2
!1
0
1
2
standard units
Figure 1.10: (a): A sample of size 100 from N(5.87, .72) and the N(5.87, .72) density.
(b): A sample of size 100 from N(42.566, 1.296) and the N(42.566, 1.296) density.
(c): A sample of size 100 from N(0, 1) and the N(0, 1) density.
1.3. PARAMETRIC FAMILIES OF DISTRIBUTIONS
28
unit above the mean, while the number 4.5 is about 2 standard units below the
mean. To see why that’s a useful way to think, Figure 1.10(b) takes the sample
from Figure 1.10(a), multiplies by 9/5 and adds 32, to simulate temperatures
measured in ◦ F instead of ◦ C. The histograms in panels (a) and (b) are slightly
different because R has chosen the bin boundaries differently; but the two Normal
curves have identical shapes. Now consider some temperatures, say 6.5◦ C = 43.7◦ F
and 4.5◦ C = 40.1◦ F. Corresponding temperatures occupy corresponding points on
the plots. A vertical line at 6.5 in panel (a) divides the density into two sections
exactly congruent to the two sections created by a vertical line at 43.7 in panel (b).
A similar statement holds for 4.5 and 40.1. The point is that the two density
curves have exactly the same shape. They are identical except for the scale on the
horizontal axis, and that scale is determined by the standard deviation. Standard
units are a scale-free way of thinking about the picture.
To continue, we converted the temperatures in panels (a) and (b) to standard
units, and plotted them in panel (c). Once again, R made a slightly different choice
for the bin boundaries, but the Normal curves all have the same shape.
Panels (b) and (c) of Figure 1.10 were produced by
y2samp <- samp * 9/5 + 32
y2.vals <- y.vals * 9/5 + 32
hist ( y2samp, prob=T, main="(b)",
xlim=c(39.2,45.5), xlab="degrees F",
ylim=c(0,1/3), ylab="density" )
lines ( y2.vals, dnorm(y2.vals,42.566,1.296) )
zsamp <- (samp-5.87) / .72
z.vals <- (y.vals-5.87) / .72
hist ( zsamp, prob=T, main="(c)",
xlim=c(-2.6,2.26), xlab="standard units",
ylim=c(0,.833), ylab="density" )
lines ( z.vals, dnorm(z.vals,0,1) )
Let Y ∼ N(µ, σ) and define a new random variable Z = (Y − µ)/σ. Z is in
standard units. It tells how many standard units Y is above or below its mean µ.
What is the distribution of Z? The easiest way to find out is to calculate pZ , the
1.4. CENTERS, SPREADS, MEANS, AND MOMENTS
29
density of Z, and see whether we recognize it. From Theorem 1.1,
1 2
1
pZ (z) = pY (σz + µ)σ = √ e− 2 z
2π
which we recognize as the N(0, 1) density. I.e., Z ∼ N(0, 1). The N(0, 1) distribution
is called the standard Normal distribution.
1.4
Centers, Spreads, Means, and Moments
Recall Figure 1.3 (pg. 11). In each panel there is a histogram of a data set along
with an estimate of the underlying pdf or pmf p. In each case we have found a
distribution that matches the data reasonably well, but the distributions we have
drawn are not the only ones that match well. We could make modest changes to
either distribution and still have a reasonably good match. But whatever pdf we
propose for the top panel should be roughly mound shaped with a center around
8◦ and a spread that ranges from about 6◦ to about 10◦ . And in the bottom panel
we would want a distribution with a peak around 2 or 3 and a longish right hand
tail.
In either case, the details of the distribution matter less than these central features. So statisticians often need to refer to the center, or location, of a sample
or a distribution and also to its spread. Section 1.4 gives some of the theoretical
underpinnings for talking about centers and spreads of distributions.
Example 1.5
Physical oceanographers study physical properties such as temperature, salinity, pressure,
oxygen concentration, and potential vorticity of the world’s oceans. Data about the
oceans’ surface can be collected by satellites’ bouncing signals off the surface. But
satellites cannot collect data about deep ocean water. Until as recently as the 1970s, the
main source of data about deep water came from ships that lower instruments to various
depths to record properties of ocean water such as temperature, pressure, salinity, etc.
(Since about the 1970s oceanographers have begun to employ neutrally buoyant floats. A
brief description and history of the floats can be found on the web at www.soc.soton.
ac.uk/JRD/HYDRO/shb/float.history.html.) Figure 1.11 shows locations, called
hydrographic stations, off the coast of Europe and Africa where ship-based measurements
were taken between about 1910 and 1990. The outline of the continents is apparent on
the right-hand side of the figure due to the lack of measurements over land.
Deep ocean currents cannot be seen but can be inferred from physical properties.
Figure 1.12 shows temperatures recorded over time at a depth of 1000 meters at nine
1.4. CENTERS, SPREADS, MEANS, AND MOMENTS
30
different locations. The upper right panel in Figure 1.12 is the same as the top panel of
Figure 1.3. Each histogram in Figure 1.12 has a black circle indicating the “center” or
“location” of the points that make up the histogram. These centers are good estimates
of the centers of the underlying pdf’s. The centers range from a low of about 5◦ at
latitude 45 and longitude -40 to a high of about 9◦ at latitude 35 and longitude -20. (By
convention, longitudes to the west of Greenwich, England are negative; longitudes to the
east of Greenwich are positive.) It’s apparent from the centers that for each latitude,
temperatures tend to get colder as we move from east to west. For each longitude,
temperatures are warmest at the middle latitude and colder to the north and south.
Data like these allow oceanographers to deduce the presence of a large outpouring of
relatively warm water called the Mediterranean tongue from the Mediterranean Sea into
the Atlantic ocean. The Mediterranean tongue is centered at about 1000 meters depth
and 35◦ N latitude, flows from east to west, and is warmer than the surrounding Atlantic
waters into which it flows.
There are many ways of describing the center of a data sample. But by far the
most common is the mean. The mean of a sample, or of any list of numbers, is just
the average.
Definition 1.1 (Mean of a sample). The mean of a sample, or any list of numbers,
x1 , . . . , xn is
1X
xi .
(1.9)
mean of x1 , . . . , xn =
n
The black circles in Figure 1.12 are means. The mean of x1 , . . . , xn is often
denoted x̄. Means are often a good first step in describing data that are unimodal
and roughly symmetric.
Similarly, means are often useful in describing distributions. For example, the
mean of the pdf in the upper panel of Figure 1.3 is about 8.1, the same as the mean
of the data in same panel. Similarly, in the bottom panel, the mean of the Poi(3.1)
distribution is 3.1, the same as the mean of the discoveries data. Of course we
chose the distributions to have means that matched the means of the data.
For some other examples, consider the Bin(n, p) distributions shown in Figure 1.5. The center of the Bin(30, .5) distribution appears to be around 15, the
center of the Bin(300, .9) distribution appears to be around 270, and so on. The
mean of a distribution, or of a random variable, is also called the expected value or
expectation and is written E(X).
31
40
20
30
latitude
50
60
1.4. CENTERS, SPREADS, MEANS, AND MOMENTS
!40
!30
!20
!10
0
longitude
Figure 1.11: hydrographic stations off the coast of Europe and Africa
1.4. CENTERS, SPREADS, MEANS, AND MOMENTS
60
0
0
5
5
10
10
40
20
0
latitude = 45
longitude = !20
20
latitude = 45
longitude = !30
20
latitude = 45
longitude = !40
32
4 6 8
4 6 8
temperature
n = 213
temperature
n = 105
temperature
n = 112
latitude = 35
longitude = !40
latitude = 35
longitude = !30
latitude = 35
longitude = !20
15
10
5
0
0
5
10
0 2 4 6 8
15
20
12
4 6 8
4 6 8
temperature
n = 37
temperature
n = 24
temperature
n = 44
latitude = 25
longitude = !40
latitude = 25
longitude = !30
latitude = 25
longitude = !20
10
5
0
0
0
5
5 10
10
20
15
4 6 8
15
4 6 8
4 6 8
4 6 8
4 6 8
temperature
n = 47
temperature
n = 35
temperature
n = 27
Figure 1.12: Water temperatures (◦ C) at 1000m depth, latitude 25, 35, 45 degrees
North longitude 20, 30, 40 degrees West
1.4. CENTERS, SPREADS, MEANS, AND MOMENTS
33
Definition 1.2 (Mean of a random variable). Let X be a random variable with cdf
FX and pdf pX . Then the mean of X (equivalently, the mean of FX ) is
(P
i P[X = i] if X is discrete
E(X) = R i
(1.10)
x pX (x) dx
if X is continuous
The logic of the definition is that E(X) is a weighted average of the possible
values of X. Each value is weighted by its importance, or probability. In addition
to E(X), another common notation for the mean of a random variable X is µX .
Let’s look at some of the families of probability distributions that we have already studied and calculate their expectations.
Binomial If X ∼ Bin(n, p) then
E(X) =
n
X
i P[x = i]
i=0
n
X
n i
=
i
p (1 − p)n−i
i
i=0
n
X n
=
i
pi (1 − p)n−i
i
i=1
= np
= np
n
X
i=1
n−1
X
j=0
(1.11)
(n − 1)!
pi−1 (1 − p)n−i
(i − 1)!(n − i)!
(n − 1)!
pj (1 − p)n−1−j
j!(n − 1 − j)!
= np
The first
five equalities are just algebra. The sixth is worth remembering. The
Pn−1
sum j=0 · · · is the sum of the probabilities of the Bin(n − 1, p) distribution.
Therefore the sum is equal to 1. You may wish to compare E(X) to Figure 1.5.
Poisson If X ∼ Poi(λ) then
E(X) = λ.
The derivation is left as Exercise 18.
Exponential If X ∼ Exp(λ) then
Z ∞
Z
−1
E(X) =
x p(x) dx = λ
0
0
∞
xe−x/λ dx = λ.
1.4. CENTERS, SPREADS, MEANS, AND MOMENTS
34
Use integration by parts.
Normal If X ∼ N(µ, σ) then E(X) = µ. The derivation is left as Exercise 18.
Statisticians also need to measure and describe the spread of distributions, random variables and samples. In Figure 1.12, the spread would measure how much
variation there is in ocean temperatures at a single location, which in turn would
tell us something about how heat moves from place to place in the ocean. Spread
could also describe the variation in the annual numbers of “great” discoveries, the
range of typical outcomes for a gambler playing a game repeatedly at a casino or
an investor in the stock market, or the uncertain effect of a change in the Federal
Reserve Bank’s monetary policy, or even why different patches of the same forest
have different plants on them.
By far the most common measures of spread are the variance and its square
root, the standard deviation.
Definition 1.3 (Variance). The variance of a sample y1 , . . . , yn is
X
Var(y1 , . . . , yn ) = n−1
(yi − ȳ)2 .
The variance of a random variable Y is
Var(Y ) = E((Y − µY )2 )
Definition 1.4 (Standard deviation). The standard deviation of a sample y1 , . . . , yn
is
q
X
(yi − ȳ))2 .
SD(y1 , . . . , yn ) = n−1
The standard deviation of a random variable Y is
p
SD(Y ) = E((Y − µY )2 ).
The variance (standard deviation) of Y is often denoted σY2 (σY ). The variances
of common distributions will be derived later in the book.
Caution: for reasons which we don’t go intoP
here, many books define the vari−1
ance of a sample as Var(y1 , . . . , yn ) = (n − 1)
(yi − ȳ)2 . For large n there is no
practical difference between the two definitions. And the definition of variance of
a random variable remains unchanged.
While the definition of the variance of a random variable highlights its interpretation as deviations away from the mean, there is an equivalent formula that is
sometimes easier to compute.
1.4. CENTERS, SPREADS, MEANS, AND MOMENTS
35
Theorem 1.2. If Y is a random variable, then Var(Y ) = E(Y 2 ) − (EY )2 .
Proof.
Var(Y ) = E((Y − EY )2 )
= E(Y 2 − 2Y EY + (EY )2 )
= E(Y 2 ) − 2(EY )2 + (EY )2
= E(Y 2 ) − (EY )2
To develop a feel for what the standard deviation measures, Figure 1.14 repeats
Figure 1.12 and adds arrows showing ± 1 standard deviation away from the mean.
Standard deviations have the same units as the original random variable; variances
have squared units. E.g., if Y is measured in degrees, then SD(Y ) is in degrees but
Var(Y ) is in degrees2 . Because of this, SD is easier to interpret graphically. That’s
why we were able to depict SD’s in Figure 1.14.
Most “mound-shaped” samples, that is, samples that are unimodal and roughly
symmetric, follow this rule of thumb:
• about 2/3 of the sample falls within about 1 standard deviation of the mean;
• about 95% of the sample falls within about 2 standard deviations of the mean.
The rule of thumb has implications for predictive accuracy. If x1 , . . . , xn are a sample from a mound-shaped distribution, then one would predict that future observations will be around x̄ with, again, about 2/3 of them within about one SD and
about 95% of them within about two SD’s.
To illustrate further, we’ll calculate the SD of a few mound-shaped random
variables and compare the SD’s to the pdf’s.
1.4. CENTERS, SPREADS, MEANS, AND MOMENTS
36
Binomial Let Y ∼ Bin(30, .5).
Var(Y ) = E(Y 2 ) − (EY )2
30
X
2 30
.530 − 152
=
y
y
y=0
=
30
X
y=1
= 15
y
30!
.530 − 152
(y − 1)!(30 − y)!
29
X
(v + 1)
v=0
29
X
29!
.529 − 152
v!(29 − v)!
(1.12)
!
29
X
29!
29!
v
= 15
.529 +
.529 − 152
v!(29 − v)!
v!(29 − v)!
v=0
v=0
29
+ 1 − 15
= 15
2
15
=
2
p
and therefore SD(Y ) = 15/2 ≈ 2.7. (See Exercises 19 and 20.)
Normal Let Y ∼ N(0, 1).
Var(Y ) = E(Y 2 )
Z ∞ 2
y2
y
√ e− 2 dy
=
2π
−∞
Z ∞ 2
y2
y
√ e− 2 dy
=2
Z0 ∞ 2π
y2
1
√ e− 2 dy
=2
2π
0
=1
(1.13)
and therefore SD(Y ) = 1. (See Exercises 19 and 20.)
Figure 1.13 shows the comparison. The top panel shows the pdf of the Bin(30, .5)
distribution; the bottom panel shows the N(0, 1) distribution.
37
0.10
0.05
+/− 1 SD
0.00
p(y)
0.15
1.4. CENTERS, SPREADS, MEANS, AND MOMENTS
+/− 2 SD’s
0
5
10
15
20
25
30
1
2
3
0.0 0.1 0.2 0.3 0.4
p(y)
y
+/− 1 SD
+/− 2 SD’s
−3
−2
−1
0
y
Figure 1.13: Two pdf’s with ±1 and ±2 SD’s. top panel: Bin(30, .5); bottom panel:
N(0, 1).
1.4. CENTERS, SPREADS, MEANS, AND MOMENTS
38
Figure 1.13 was produced by the following R code.
par ( mfrow=c(2,1) )
y <- 0:30
sd <- sqrt ( 15 / 2 )
plot ( y, dbinom(y,30,.5), ylab="p(y)" )
arrows ( 15-2*sd, 0, 15+2*sd, 0, angle=60, length=.1,
code=3, lwd=2 )
text ( 15, .008, "+/- 2 SD’s" )
arrows ( 15-sd, .03, 15+sd, .03, angle=60, length=.1,
code=3, lwd=2 )
text ( 15, .04, "+/- 1 SD" )
y <- seq(-3,3,length=60)
plot ( y, dnorm(y,0,1), ylab="p(y)", type="l" )
arrows ( -2, .02, 2, .02, angle=60, length=.1, code=3, lwd=2 )
text ( 0, .04, "+/- 2 SD’s" )
arrows ( -1, .15, 1, .15, angle=60, length=.1, code=3, lwd=2 )
text ( 0, .17, "+/- 1 SD" )
• arrows(x0, y0, x1, y1, length, angle, code, ...) adds arrows to a
plot. See the documentation for the meaning of the arguments.
• text adds text to a plot. See the documentation for the meaning of the
arguments.
Definition 1.5 (Moment). The r’th moment of a sample y1 , . . . , yn or random variable Y is defined as
X
n−1
(yi − ȳ)r
(for samples)
E((Y − µY )r )
(for random variables)
Variances are second moments. Moments above the second have little applicability.
R has built-in functions to compute means and variances and can compute other
moments easily. Note that R uses the divisor n − 1 in its definition of variance.
1.4. CENTERS, SPREADS, MEANS, AND MOMENTS
39
# Use R to calculate moments of the Bin(100,.5) distribution
x <- rbinom ( 5000, 100, .5 )
m <- mean ( x ) # the mean
v <- var ( x ) # the variance
s <- sqrt ( v ) # the SD
mean ( (x-m)^3 ) # the third moment
our.v <- mean ( (x-m)^2 ) # our variance
our.s <- sqrt ( our.v )
# our standard deviation
print ( c ( v, our.v ) ) # not quite equal
print ( c ( s, our.s ) ) # not quite equal
• rbinom(...) generates random draws from the binomial distribution. The
5000 says how many draws to generate. The 100 and .5 say that the draws
are to be from the Bin(100, .5) distribution.
R
P
Let h be a function. Then E[h(Y )] = h(y)p(y) dy ( h(y)p(y) in the discrete
case) is the expected value of h(Y ) and is called a generalized moment. There are
sometimes two ways to evaluate E[h(Y )]. One is to evaluate
R the integral. The other
is to let X = h(Y ), find pX , and then evaluate E[X] = xpX (x) dx. For example,
let Y have pdf fY (y) = 1 for y ∈ (0, 1), and let X = h(Y ) = exp(Y ).
Method 1
Z 1
E[h(Y )] =
exp(y) dy = exp(y)|10 = e − 1.
0
Method 2
pX (x) = pY (log(x)) dy/dx = 1/x
Z e
Z e
E[X] =
xpx (x) dx =
1 dx = e − 1
1
1
If h is a linear function then E[h(Y )] has a particularly appealing form.
Theorem 1.3. If X = a + bY then E[X] = a + bE[Y ].
Proof. We prove the continuous case; the discrete case is left as an exercise.
Z
EX = (a + by)fY (y) dy
Z
Z
= a fY (y) dy + b yfy (y) dy
= a + bEY
1.5. JOINT, MARGINAL AND CONDITIONAL PROBABILITY
40
There is a corresponding theorem for variance.
Theorem 1.4. If X = a + bY then Var(X) = b2 Var(Y ).
Proof. We prove the continuous case; the discrete case is left as an exercise. Let
µ = E[Y ].
Var(X) = E[(a + bY − (a + bµ))2 ]
= E[b2 (Y − µ)2 ]
= b2 Var(Y )
1.5
Joint, Marginal and Conditional Probability
Statisticians often have to deal simultaneously with the probabilities of several
events, quantities, or random variables. For example, we may classify voters in a
city according to political party affiliation and support for a school bond referendum. Let A and S be a voter’s affiliation and support, respectively.
(
(
D if Democrat
Y if in favor
A=
and
S=
R if Republican.
N if opposed
Suppose a polling organization finds that 80% of Democrats and 35% of Republicans favor the bond referendum. The 80% and 35% are called conditional probabilities because they are conditional on party affiliation. The notation for conditional
probabilities is pS | A . As usual, the subscript indicates which random variables
we’re talking about. Specifically,
pS | A (Y | D) = 0.80;
pS | A (Y | R) = 0.35;
pS | A (N | D) = 0.20;
pS | A (N | R) = 0.65.
We say “the conditional probability that S = N given A = D is 0.20”, etc.
Suppose further that 60% of voters in the city are Democrats. Then 80% of
60% = 48% of the voters are Democrats who favor the referendum. The 48% is
called a joint probability because it is the probability of (A = D, S = Y ) jointly.
The notation is pA,S (D, Y ) = .48. Likewise, pA,S (D, N ) = .12; pA,S (R, Y ) = .14;
and pA,S (R, N ) = 0.26. Table 1.1 summarizes the calculations. The quantities
1.5. JOINT, MARGINAL AND CONDITIONAL PROBABILITY
60
0
0
5
5
10
10
40
20
0
latitude = 45
longitude = !20
20
latitude = 45
longitude = !30
20
latitude = 45
longitude = !40
4 6 8
4 6 8
temperature
n = 213
temperature
n = 105
temperature
n = 112
latitude = 35
longitude = !40
latitude = 35
longitude = !30
latitude = 35
longitude = !20
15
10
5
0
5
10
0 2 4 6 8
15
20
12
4 6 8
0
41
4 6 8
temperature
n = 37
temperature
n = 24
temperature
n = 44
latitude = 25
longitude = !40
latitude = 25
longitude = !30
latitude = 25
longitude = !20
10
5
0
0
0
5
5 10
10
20
15
4 6 8
15
4 6 8
4 6 8
4 6 8
4 6 8
temperature
n = 47
temperature
n = 35
temperature
n = 27
Figure 1.14: Water temperatures (◦ C) at 1000m depth, latitude 25, 35, 45 degrees
North, longitude 20, 30, 40 degrees West, with standard deviations
1.5. JOINT, MARGINAL AND CONDITIONAL PROBABILITY
Democrat
Republican
For Against
48%
12%
14%
26%
62%
38%
42
60%
40%
Table 1.1: Party Affiliation and Referendum Support
.60, .40, .62, and .38 are called marginal probabilities. The name derives from
historical reasons, because they were written in the margins of the table. Marginal
probabilities are probabilities for one variable alone, the ordinary probabilities that
we’ve been talking about all along.
The event A = D can be partitioned into the two smaller events (A = D, S = Y )
and (A = D, S = N ). So
pA (D) = .60 = .48 + .12 = pA,S (D, Y ) + pA,S (D, N ).
The event A = R can be partitioned similarly. Too, the event S = Y can be
partitioned into (A = D, S = Y ) and (A = R, S = Y ). So
pS (Y ) = .62 = .48 + .14 = pA,S (D, Y ) + pA,S (R, Y ).
These calculations illustrate a general principle: To get a marginal probability
for one variable, add the joint probabilities for all values of the other variable. The
general formulae for working simultaneously with two discrete random variables
X and Y are
fX,Y (x, y) = fX (x) · fY | X (y | x) = fY (y) · fX | Y (x | y)
X
X
fX,Y (x, y)
fX,Y (x, y)
fY (y) =
fX (x) =
y
(1.14)
x
Sometimes we know joint probabilities and need to find marginals and conditionals; sometimes it’s the other way around. And sometimes we know fX and fY | X
and need to find fY or fX | Y . The following story is an example of the latter. It is a
common problem in drug testing, disease screening, polygraph testing, and many
other fields.
The participants in an athletic competition are to be randomly tested for steroid
use. The test is 90% accurate in the following sense: for athletes who use steroids,
the test has a 90% chance of returning a positive result; for non-users, the test has
a 10% chance of returning a positive result. Suppose that only 30% of athletes use
1.5. JOINT, MARGINAL AND CONDITIONAL PROBABILITY
43
steroids. An athlete is randomly selected. Her test returns a positive result. What
is the probability that she is a steroid user?
This is a problem of two random variables, U , the steroid use of the athlete and
T , the test result of the athlete. Let U = 1 if the athlete uses steroids; U = 0 if not.
Let T = 1 if the test result is positive; T = 0 if not. We want fU | T (1 | 1). We can
calculate fU | T if we know fU,T ; and we can calculate fU,T because we know fU and
fT | U . Pictorially,
fU , fT | U −→ fU,T −→ fU | T
The calculations are
fU,T (0, 0) = (.7)(.9) = .63
fU,T (1, 0) = (.3)(.1) = .03
fU,T (0, 1) = (.7)(.1) = .07
fU,T (1, 1) = (.3)(.9) = .27
so
fT (0) = .63 + .03 = .66
fT (1) = .07 + .27 = .34
and finally
fU | T (1 | 1) = fU,T (1, 1)/fT (1) = .27/.34 ≈ .80.
In other words, even though the test is 90% accurate, the athlete has only an 80%
chance of using steroids. If that doesn’t seem intuitively reasonable, think of a
large number of athletes, say 100. About 30 will be steroid users of whom about
27 will test positive. About 70 will be non-users of whom about 7 will test positive.
So there will be about 34 athletes who test positive, of whom about 27, or 80%
will be users.
Table 1.2 is another representation of the same problem. It is important to
become familiar with the concepts and notation in terms of marginal, conditional
and joint distributions, and not to rely too heavily on the tabular representation
because in more complicated problems there is no convenient tabular representation.
Example 1.6 is a further illustration of joint, conditional, and marginal distributions.
Example 1.6 (Seedlings)
Example 1.4 introduced an observational experiment to learn about the rate of seedling
production and survival at the Coweeta Long Term Ecological Research station in western
North Carolina. For a particular quadrat in a particular year, let N be the number of
1.5. JOINT, MARGINAL AND CONDITIONAL PROBABILITY
U =0
U =1
T =0 T =1
.63
.07
.03
.27
.66
.34
44
.70
.30
Table 1.2: Steroid Use and Test Results
4
...
0
2
X
6
...
new seedlings that emerge. Suppose that N ∼ Poi(λ) for some λ > 0. Each seedling
either dies over the winter or survives to become an old seedling the next year. Let θ
be the probability of survival and X be the number of seedlings that survive. Suppose
that the survival of any one seedling is not affected by the survival of any other seedling.
Then X ∼ Bin(N, θ). Figure 1.15 shows the possible values of the pair (N, X). The
probabilities associated with each of the points in Figure 1.15 are denoted fN,X where, as
usual, the subscript indicates which variables we’re talking about. For example, fN,X (3, 2)
is the probability that N = 3 and X = 2.
0
1
2
3
4
5
6
7
N
Figure 1.15: Permissible values of N and X, the number of new seedlings and the
number that survive.
The next step is to figure out what the joint probabilities are. Consider, for example,
the event N = 3. That event can be partitioned into the four smaller events (N =
1.5. JOINT, MARGINAL AND CONDITIONAL PROBABILITY
45
3, X = 0), (N = 3, X = 1), (N = 3, X = 2), and (N = 3, X = 3). So
fN (3) = fN,X (3, 0) + fN,X (3, 1) + fN,X (3, 2) + fN,X (3, 3)
The Poisson model for N says fN (3) = P[N = 3] = e−λ λ3 /6. But how is the total
e−λ λ3 /6 divided into the four parts? That’s where the Binomial model for X comes in.
The division is made according to the Binomial probabilities
3 2
3 3
3
3
2
3
θ (1 − θ)
θ
θ(1 − θ)
(1 − θ)
2
3
1
0
The e−λ λ3 /6 is a marginal probability like the 60% in the affiliation/support problem.
The binomial probabilities above are conditional probabilities like the 80% and 20%; they
are conditional on N = 3. The notation is fX|N (2 | 3) or P[X = 2 | N = 3]. The joint
probabilities are
e−λ λ3
e−λ λ3
(1 − θ)3
fN,X (3, 1) =
3θ(1 − θ)2
6
6
e−λ λ3 2
e−λ λ3 3
fN,X (3, 2) =
3θ (1 − θ)
fN,X (3, 3) =
θ
6
6
fN,X (3, 0) =
In general,
e−λ λn n x
fN,X (n, x) = fN (n)fX | N (x | n) =
θ (1 − θ)n−x
n!
x
An ecologist might be interested in fX , the pdf for the number of seedlings that will
be recruited into the population in a particular year. For a particular number x, fX (x)
is like looking in Figure 1.15 along the horizontal line corresponding to X = x. To get
fX (x) ≡ P[X = x], we must add up all the probabilities on that line.
∞
X
X
e−λ λn n x
fN,X (n, x) =
θ (1 − θ)n−x
fX (x) =
n!
x
n
n=x
=
∞
X
e−λ(1−θ) (λ(1 − θ))n−x e−λθ (λθ)x
n=x
(n − x)!
x!
∞
e−λθ (λθ)x X e−λ(1−θ) (λ(1 − θ))z
=
x!
z!
z=0
=
e−λθ (λθ)x
x!
1.5. JOINT, MARGINAL AND CONDITIONAL PROBABILITY
46
P
The last equality follows since z · · · = 1 because it is the sum of probabilities from
the Poi(λ(1 − θ)) distribution. The final result is recognized as a probability from the
Poi(λ∗ ) distribution where λ∗ = λθ. So X ∼ Poi(λ∗ ).
In the derivation we used the substitution z = n−x. The trick is worth remembering.
For continuous random variables, conditional and joint densities are written
pX | Y (x | y) and pX,Y (x, y) respectively and, analgously to Equation 1.14 we have
pX,Y (x, y) = pX (x)pY | X (y | x) = pY (y)pX | Y (x | y)
Z ∞
Z ∞
pX,Y (x, y) dy
pY (y) =
pX,Y (x, y) dx
pX (x) =
−∞
(1.15)
−∞
The logic is the same as for discrete random variables. In order for (X = x, Y = y)
to occur we need either of the following.
1. First X = x occurs then Y = y occurs. The “probability” of that happening
is just pX (x) × pY | X (y | x), the “probability” that X = x occurs times the
“probability” that Y = y occurs under the condition that X = x has already
occured. “Probability” is in quotes because, for continuous random variables,
the probability is 0. But “probability” is a useful way to think intuitively.
2. First Y = y occurs then X = x occurs. The reasoning is similar to that in
item 1.
Just as for single random variables, probabilitiesRare integrals of the density.
R
If A is a region in the (x, y) plane, P[(X, Y ) ∈ A] = A p(x, y) dx dy, where A . . .
indicates a double integral over the region A.
Just as for discrete random variables, the unconditional density of a random
variable is called its marginal density; pX and pY are marginal densities. Let B ⊂ R
be a set. Since a density is “the function
R that must be integrated to calculate a
probability”, on one hand, P[X ∈ B] = B pX (x) dx. On the other hand,
Z Z
P[X ∈ B] = P[(X, Y ) ∈ B × R] =
pX,Y (x, y) dy
B
dx
R
R
which implies pX (x) = R pX,Y (x, y) dy.
An example will help illustrate. A customer calls the computer Help Line. Let
X be the amount of time he spends on hold and Y be the total duration of the call.
The amount of time a consultant spends with him after his call is answered is W =
Y − X. Suppose the joint density is pX,Y (x, y) = e−y in the region 0 < x < y < ∞.
1.5. JOINT, MARGINAL AND CONDITIONAL PROBABILITY
1. What is the marginal density of X?
Z
Z
p(x) = p(x, y) dy =
∞
e
−y
x
47
∞
dy = −e = e−x
−y x
2. What is the marginal density of Y ?
Z
Z
p(y) = p(x, y) dx =
y
e−y dx = ye−y
0
3. What is the conditional density of X given Y ?
p(x | y) =
p(x, y)
= y −1
p(y)
4. What is the conditional density of Y given X?
p(y | x) =
p(x, y)
= ex−y
p(x)
5. What is the marginal density of W ?
Z ∞ Z x+w
d
d
p(w) =
e−y dydx
P[W ≤ w] =
dw
dw 0
x
Z ∞
x+w d
=
−e−y dx
dw 0
x
Z ∞
d
e−x (1 − e−w ) dx = e−w
=
dw 0
Figure 1.16 illustrates the Help Line calculations. For questions 1 and 2, the
answer comes from using Equations 1.15. The only part deserving comment is the
limits of integration. In question 1, for example, for any particular value X = x,
Y ranges from x to ∞, as can be seen from panel (a) of the figure. That’s where
the limits of integration come from. In question 2, for any particular y, X ∈ (0, y),
which are the limits of integration. Panel (d) shows the conditional density of X
given Y for three different values of Y . We see that the density of X is uniform on
the interval (0, y). See Section 5.4 for discussion of this density. Panel (d) shows
the conditional density of Y given X for three different values of X. It shows,
first, that Y > X and second, that the density of Y decays exponentially. See
1.5. JOINT, MARGINAL AND CONDITIONAL PROBABILITY
(b)
0.4
p(x)
2
0
0.0
1
y
3
0.8
4
(a)
48
1
2
3
4
0
2
4
6
x
x
(c)
(d)
8
0.0
4
6
8
10
0.0
1.0
2.0
x
(e)
(f)
y!x=w
y!x=0
0
0.0
2
0.4
0.8
x=
x=
x=
3.0
6
y
4
2
y
0
p(y|x)
10
y=1
y=2
y=3
1.0
p(x|y)
0.2
0.0
p(y)
2.0
0
0
2
4
6
y
8
10
0
1
2
3
4
x
Figure 1.16: (a): the region of R2 where (X, Y ) live; (b): the marginal density of
X; (c): the marginal density of Y ; (d): the conditional density of X given Y for
three values of Y ; (e): the conditional density of Y given X for three values of X;
(f): the region W ≤ w
1.5. JOINT, MARGINAL AND CONDITIONAL PROBABILITY
49
Section 1.3.3 for discussion of this density. Panel (f) shows the region of integration
for question 5. Take the time to understand the method being used to answer
question 5.
When dealing with a random variable X, sometimes its pdf is given to us and
we can calculate its expectation:
Z
E(X) = xp(x) dx.
(The integral is replaced by a sum if X is discrete.) Other times X arises more
naturally as part of a pair (X, Y ) and its expectation is
ZZ
E(X) =
xp(x, y) dxdy.
The two formulae are, of course, equivalent. But when X does arise as part of a
pair, there is still another way to view p(x) and E(X):
Z
pX (x) =
pX | Y (x | y) pY (y) dy = E pX | Y (x | y)
(1.16)
Z Z
E(X) =
xpX | Y (x | y) dx pY (y) dy = E (E(X | Y )) .
(1.17)
The notation deserves some explanation. For any number
R x, pX | Y (x | y) is a function of y, say g(y). The middle term in Equation 1.16 is g(y)p(y)dy, which equals
E(g(y)), which is the right hand term. Similarly,
R E(X | Y ) is a function of Y , say
h(Y ). The middle term in Equation 1.17 is h(y)p(y)dy, which equals E(h(y)),
which is the right hand term.
Example 1.7 (Seedlings, continued)
Examples 1.4 and 1.6 discussed (N, X), the number of new seedlings in a forest quadrat
and the number of those that survived over the winter. Example 1.6 suggested the
statistical model
N ∼ Poi(λ)
and
X | N ∼ Bin(N, θ).
Equation 1.17 shows that E(X) can be computed as
E(X) = E (E(X | N )) = E(N θ) = θE(N ) = θλ.
Example 1.8 (Craps, continued)
Examples 1.1, 1.2 and 1.3 introduced the game of craps. Example 1.8 calculates the
chance of winning.
(
0 if shooter loses
Let X =
1 if shooter wins
1.5. JOINT, MARGINAL AND CONDITIONAL PROBABILITY
50
X has a Bernoulli distribution. We are trying to find
P[shooter wins] = pX (1) = E(X).
(Make sure you see why pX (1) = E(X).) Let Y be the outcome of the Come-out roll.
Equation 1.17 says
E(X) = E (E(X | Y ))
=
E(X | Y = 2) P[Y = 2] + E(X | Y = 3) P[Y = 3]
+ E(X | Y = 4) P[Y = 4] + E(X | Y = 5) P[Y = 5]
+ E(X | Y = 6) P[Y = 6] + E(X | Y = 7) P[Y = 7]
+ E(X | Y = 8) P[Y = 8] + E(X | Y = 9) P[Y = 9]
+ E(X | Y = 10) P[Y = 10] + E(X | Y = 11) P[Y = 11]
+ E(X | Y = 12) P[Y = 12]
1
2
3
=
0×
+0×
+ E(X | Y = 4)
36
36
36
4
5
+ E(X | Y = 5) + E(X | Y = 6)
36
36
6
5
4
+1×
+ E(X | Y = 8) + E(X | Y = 9)
36
36
36
3
2
1
+ E(X | Y = 10) + 1 ×
+0× .
36
36
36
So it only remains to find E(X | Y = y) for y = 4, 5, 6, 8, 9, 10. The calculations are all
similar. We will do one of them to illustrate. Let w = E(X | Y = 5) and let z denote
the next roll of the dice. Once 5 has been established as the point, then a roll of the
dice has three possible outcomes: win (if z = 5), lose (if z = 7), or roll again (if z is
anything else). Therefore
w = 1 × 4/36 + 0 × 6/36 + w × 26/36
(10/36)w = 4/36
w = 4/10.
After similar calculations for the other possible points we find
E(X) =
3 3
4 4
5 5
6
5 5
4 4
3 3
2
+
+
+
+
+
+
+
≈ .493.
9 36 10 36 11 36 36 11 36 10 36 9 36 36
Craps is a very fair game; the house has only a slight edge.
1.6. ASSOCIATION, DEPENDENCE, INDEPENDENCE
1.6
51
Association, Dependence, Independence
It is often useful to describe or measure the degree of association between two random variables X and Y . The R dataset iris provides a good example. It contains
the lengths and widths of setals and petals of 150 iris plants. The first several lines
of iris are
Sepal.Length Sepal.Width Petal.Length Petal.Width Species
1
5.1
3.5
1.4
0.2 setosa
2
4.9
3.0
1.4
0.2 setosa
3
4.7
3.2
1.3
0.2 setosa
Figure 1.17 shows each variable plotted against every other variable. It is evident
from the plot that petal length and petal width are very closely associated with
each other, while the relationship between sepal length and sepal width is much
weaker. Statisticians need a way to quantify the strength of such relationships.
Figure 1.17 was produced by the following line of R code.
pairs ( iris[,1:4] )
• pairs() produces a pairs plot, a matrix of scatterplots of each pair of variables. The names of the variables are shown along the main diagonal of the
matrix. The (i, j)th plot in the matrix is a plot of variable i versus variable
j. For example, the upper right plot has sepal length on the vertical axis and
petal width on the horizontal axis.
By far the most common measures of association are covariance and correlation.
Definition 1.6. The covariance of X and Y is
Cov(X, Y ) ≡ E((X − µX )(Y − µY ))
In R, cov measures the covariance in a sample. Thus, cov(iris[,1:4]) produces the matrix
Sepal.Length
Sepal.Length
0.68569351
Sepal.Width
-0.04243400
Petal.Length
1.27431544
Petal.Width
0.51627069
Sepal.Width Petal.Length Petal.Width
-0.04243400
1.2743154
0.5162707
0.18997942
-0.3296564 -0.1216394
-0.32965638
3.1162779
1.2956094
-0.12163937
1.2956094
0.5810063
1.6. ASSOCIATION, DEPENDENCE, INDEPENDENCE
3.0
4.0
0.5
1.5
2.5
6.5
7.5
2.0
52
2.0 2.5 3.0 3.5 4.0
4.5
5.5
Sepal.Length
5
6
7
Sepal.Width
0.5 1.0 1.5 2.0 2.5
1
2
3
4
Petal.Length
Petal.Width
4.5
6.0
7.5
1
3
5
7
Figure 1.17: Lengths and widths of sepals and petals of 150 iris plants
1.6. ASSOCIATION, DEPENDENCE, INDEPENDENCE
53
in which the diagonal entries are variances and the off-diagonal entries are covariances.
The measurements in iris are in centimeters. To change to millimeters we
would multiply each measurement by 10. Here’s how that affects the covariances.
> cov ( 10*iris[,1:4] )
Sepal.Length Sepal.Width Petal.Length Petal.Width
Sepal.Length
68.569351
-4.243400
127.43154
51.62707
Sepal.Width
-4.243400
18.997942
-32.96564
-12.16394
Petal.Length
127.431544 -32.965638
311.62779
129.56094
Petal.Width
51.627069 -12.163937
129.56094
58.10063
Each covariance has been multiplied by 100 because each variable has been multiplied by 10. In fact, this rescaling is a special case of the following theorem.
Theorem 1.5. Let X and Y be random variables. Then Cov(aX + b, cY + d) =
ac Cov(X, Y ).
Proof.
Cov(aX + b, cY + d) = E ((aX + b − (aµX + b))(cY + d − (cµY + d)))
= E(ac(X − µX )(Y − µY )) = ac Cov(X, Y )
Theorem 1.5 shows that Cov(X, Y ) depends on the scales in which X and Y are
measured. A scale-free measure of association would also be useful. Correlation is
the most common such measure.
Definition 1.7. The correlation between X and Y is
Cor(X, Y ) ≡
Cov(X, Y )
SD(X) SD(Y )
cor measures correlation. The correlations in iris are
> cor(iris[,1:4])
Sepal.Length Sepal.Width Petal.Length Petal.Width
Sepal.Length
1.0000000 -0.1175698
0.8717538
0.8179411
Sepal.Width
-0.1175698
1.0000000
-0.4284401 -0.3661259
Petal.Length
0.8717538 -0.4284401
1.0000000
0.9628654
Petal.Width
0.8179411 -0.3661259
0.9628654
1.0000000
1.6. ASSOCIATION, DEPENDENCE, INDEPENDENCE
54
which confirms the visually impression that sepal length, petal length, and petal
width are highly associated with each other, but are only loosely associated with
sepal width.
Theorem 1.6 tells us that correlation is unaffected by linear changes in measurement scale.
Theorem 1.6. Let X and Y be random variables. Then Cor(aX + b, cY + d) =
Cor(X, Y ).
Proof. See Exercise 40.
Correlation doesn’t measure all types of association; it only measures clustering
around a straight line. The first two columns of Figure 1.18 show data sets that
cluster around a line, but with some scatter above and below the line. These data
sets are all well described by their correlations, which measure the extent of the
clustering; the higher the correlation, the tighter the points cluster around the line
and the less they scatter. Negative values of the correlation correspond to lines
with negative slopes. The last column of the figure shows some other situations.
The first panel of the last column is best described as having two isolated clusters
of points. Despite the correlation of .96, the panel does not look at all like the
last panel of the second column. The second and third panels of the last column
show data sets that follow some nonlinear pattern of association. Again, their
correlations are misleading. Finally, the last panel of the last column shows a data
set in which most of the points are tightly clustered around a line but in which
there are two outliers. The last column demonstrates that correlations are not
good descriptors of nonlinear data sets or data sets with outliers.
Correlation measures linear association between random variables. But sometimes we want to say whether two random variables have any association at all,
not just linear.
Definition 1.8. Two two random variables, X and Y , are said to be independent if
p(X | Y ) = p(X), for all values of Y . If X and Y are not independent then they are
said to be dependent.
If X and Y are independent then it is also true that p(Y | X) = p(Y ). The
interpretation is that knowing one of the random variables does not change the
probability distribution of the other. If X and Y are independent (dependent) we
write X ⊥ Y (X 6⊥ Y ). If X and Y are independent then Cov(X, Y ) = Cor(X, Y ) =
0. The converse is not true. Also, if X ⊥ Y then p(x, y) = p(x)p(y). This last
equality is usually taken to be the definition of independence.
1.6. ASSOCIATION, DEPENDENCE, INDEPENDENCE
55
cor = !0.9
cor = 0.3
cor = 0.96
cor = !0.5
cor = 0.5
cor = 0.67
cor = !0.2
cor = 0.8
cor = !0.37
cor = 0
cor = 0.95
cor = 0.62
Figure 1.18: correlations
1.6. ASSOCIATION, DEPENDENCE, INDEPENDENCE
56
Do not confuse independent with mutually exclusive. Let X denote the outcome
of a die roll and let A = 1 if X ∈ {1, 2, 3} and A = 0 if X ∈ {4, 5, 6}. A is called an
indicator variable because it indicates the occurence of a particular event. There is
a special notation for indicator variables:
A = 1{1,2,3} (X).
1{1,2,3} is an indicator function. 1{1,2,3} (X) is either 1 or 0 according to whether
X is in the subscript. Let B = 1{4,5,6} (X), C = 1{1,3,5} (X), D = 1{2,4,6} (X) and
E = 1{1,2,3,4} (X). A and B are dependent because P[A] = .5 but P[A | B] = 0. D
and E are independent because P[D] = P[D | E] = .5. You can also check that
P[E] = P[E | D] = 2/3. Do not confuse dependence with causality. A and B are
dependent, but neither causes the other.
For an example, recall the Help Line story on page 46. X and Y were the
amount of time on hold and the total length of the call, respectively. The difference
was W = Y − X. We found p(x | y) = y −1 . Because p(x | y) depends on y, X 6⊥ Y .
Similarly, p(y | x) depends on x. Does that make sense? Would knowing something
about X tell us anything about Y ?
What about X and W ? Are they independent?
p(w | x) =
d
d
P[W ≤ w | X = x] =
P[Y ≤ w + x | X = x] = e−w
dw
dw
which does not depend on x. Therefore X ⊥ W . Does that make sense? Would
knowing something about X tell us anything about W ?
Example 1.9 (Seedlings, continued)
Examples 1.4, 1.6, and 1.7 were about new seedlings in forest quadrats. Suppose that
ecologists observe the number of new seedlings in a quadrat for k successive years; call
the observations N1 , . . . , Nk . If the seedling arrival rate is the same every year, then we
could adopt the model Ni ∼ Poi(λ). I.e., λ is the same for every year. If λ is known,
or if we condition on λ, then the number of new seedlings in one year tells us nothing
about the number of new seedlings in another year, we would model the Ni ’s as being
independent, and their joint density, conditional on λ, would be
p(n1 , . . . , nk | λ) =
k
Y
i=1
p(ni | λ) =
k
Y
e−λ λni
i=1
ni !
P
e−kλ λ ni
= Q
ni !
But if λ is unknown then we might treat it like a random variable. It would be a random
variable if, for instance, different locations in the forest had different λ’s we chose a
1.7. SIMULATION
57
location at random or if we thought of Nature as randomly choosing λ for our particular
location. In that case the data from early years, N1 , . . . , Nm , say, yield information about
λ and therefore about likely values of Nm+1 , . . . , Nk , so the Ni ’s are dependent. In fact,
Z
p(n1 , . . . , nk ) =
Z
p(n1 , . . . , nk | λ)p(λ) dλ =
P
e−kλ λ ni
Q
p(λ) dλ
ni !
So, whether the Ni ’s are independent is not a question with a single right answer. Instead,
it depends on our perspective. But in either case, we would say the Ni ’s are conditionally
independent given λ.
1.7
Simulation
We have already seen, in Example 1.2, an example of computer simulation to estimate a probability. More broadly, simulation can be helpful in several types of
problems: calculating probabilities, assessing statistical procedures, and evaluating integrals. These are explained and exemplified in the next several subsections.
1.7.1
Calculating Probabilities
Probabilities can often be estimated by computer simulation. Simulations are especially useful for events so complicated that their probabilities cannot be easily
calculated by hand, but composed of smaller events that are easily mimicked on
computer. For instance, in Example 1.2 we wanted to know the probability that
the shooter in a craps game rolls either 7 or 11 on the Come Out roll. Although
it’s easy enough to calculate this probability exactly, we did it by simulation in the
Example.
Expected values can also be estimated by simulations. Let Y be a random
variable and suppose we want to estimate the expected value of some function
µg ≡ E(g(Y )). We can write a computer program to simulate Y many times. To
keep track of the simulations we use the notation y (j) for the j’th simulated value
of Y . Let n be the number of simulations. Then
X
µ̂g = n−1
g(y (i) )
is a sensible estimate of µg . In fact, the Law of Large Numbers tells us that
X
lim n−1
g(y (i) ) = µg .
n→∞
1.7. SIMULATION
58
So as we do a larger and larger simulation we get a more and more accurate
estimate of µg .
Probabilities can be computed as special cases of expectations. Suppose we
want to calculate P[Y ∈ S] for some set S. Define X ≡ 1S (Y ). Then P[Y ∈ S] =
E(X) and is sensibly estimated by
X
number of occurences of S
x(i) .
= n−1
number of trials
Example 1.10 illustrates with the game of Craps.
Example 1.10 (Craps, continued)
Example 1.8 calculated the chance of winning the game of Craps. Here is the R code to
calculate the same probability by simulation.
makepoint <- function ( point ) {
determined <- F
while ( !determined ) { # roll until outcome is determined
roll <- sum ( sample ( 6, 2, replace=T ) )
if ( roll == point ) {
made <- T
determined <- T
} else if ( roll == 7 ) {
made <- F
determined <- T
}
} # end while
return ( made )
} # end makepoint
sim.craps <- function () {
roll <- sum ( sample ( 6, 2, replace=T ) )
if ( roll==7 || roll==11 )
win <- T
else if ( roll==2 || roll==3 || roll==12 )
win <- F
else
win <- makepoint ( roll )
return ( win )
1.7. SIMULATION
59
}
n.sim <- 1000
wins <- 0
for ( i in 1:n.sim )
wins <- wins + sim.craps()
print ( wins/n.sim )
• “!” is R’s symbol for not. If determined is T then !determined is F.
• while(!determined) begins a loop. The loop will repeat as many times as
necessary as long as !determined is T.
Try the example code a few times. See whether you get about 49% as Example 1.8
suggests.
Along with the estimate itself, it is useful to estimate the accuracy of µ̂g as an
estimate of µg . If the simulations are independent then Var(µ̂g ) = n−1 Var(g(Y
));
P
if there are many of them then Var(g(Y )) can be well estimated by n−1 ((g(y) −
µ̂g )2 ) p
and
be well estimated by
P SD(g(Y )) can
((g(y) − µ̂g )2 ). Because SD’s decrease in proportion to n−1/2 (See the
n−1/2
Central Limit Theorem.), it takes a 100 fold increase in n to get, for example, a 10
fold increase in accuracy.
Similar reasoning applies to probabilities, but when we are simulating the occurence or nonoccurence of an event, then the simulations are Bernoulli trials, so
we have a more explicit formula for the variance and SD.
Example 1.11 (Craps, continued)
How accurate is the simulation in Example 1.10?
The simulation keeps track of X, the number of successes in n.sim trials. Let θ
be the true probability of success. (Example 1.8 found θ ≈ .49, but in most practical
applications we won’t know θ.)
X ∼ Bin(n.sim, θ)
Var(X) = n.sim(θ)(1 − θ)
p
SD(X/n.sim) = (θ)(1 − θ)/n.sim
and, by the Central Limit Theorem if n.sim is large,
θ̂ = X/n.sim ∼ N(θ, (θ(1 − θ)/n.sim)1/2 )
1.7. SIMULATION
60
0.3
0.5
0.7
What does this mean in practical terms? How accurate is the simulation when n.sim =
50, or 200, or 1000, say? To illustrate we did 1000 simulations with n.sim = 50, then
another 1000 with n.sim = 200, and then another 1000 with n.sim = 1000.
The results are shown as a boxplot in Figure 1.19. In Figure 1.19 there are three
boxes, each with whiskers extending vertically. The box for n.sim = 50 shows that the
median of the 1000 θ̂’s was just about .50 (the horizontal line through the box), that
50% of the θ̂’s fell between about .45 and .55 (the upper and lower ends of the box), and
that almost all of the θ̂’s fell between about .30 and .68 (the extent of the whiskers). In
comparison, the 1000 θ̂’s for n.sim = 200 are spread out about half as much, and the
1000 θ̂’s for n.sim = 1000 are spread out about half as much again. The factor of about
a half comes from the n.sim.5 in the formula for SD(θ̂). When n.sim increases by a
factor of about 4, the SD decreases by a factor of about 2. See the notes for Figure 1.19
for a further description of boxplots.
50
200
1000
n.sim
Figure 1.19: 1000 simulations of θ̂ for n.sim = 50, 200, 1000
Here is the R code for the simulations and Figure 1.19.
N <- 1000
n.sim <- c(50, 200, 1000)
1.7. SIMULATION
61
theta.hat <- matrix ( NA, N, length(n.sim) )
for ( i in seq(along=n.sim) ) {
for ( j in 1:N ) {
wins <- 0
for ( k in 1:n.sim[i] )
wins <- wins + sim.craps()
theta.hat[j,i] <- wins / n.sim[i]
}
}
boxplot ( theta.hat ~ col(theta.hat), names=n.sim,
xlab="n.sim" )
• matrix forms a matrix. The form is matrix(x,nrows,ncols) where x are
the entries in the matrix and nrows and ncols are the numbers of rows and
columns.
• seq(along=n.sim) is the same as 1:length(n.sim) except that it behaves
more sensibly in case length(n.sim) is 0.
• A boxplot is one way to display a data set. It produces a rectangle, or box,
with a line through the middle. The rectangle contains the central 50% of the
data. The line indicates the median of the data. Extending vertically above
and below the box are dashed lines called whiskers. The whiskers contain
most of the outer 50% of the data. A few extreme data points are plotted
singly. See Example 2.3 for another use of boxplots and a fuller explanation.
1.7.2
Evaluating Statistical Procedures
Simulation can sometimes be useful in deciding whether a particular experiment
is worthwhile or in choosing among several possible experiments or statistical procedures. For a fictitious example, consider ABC College, where, of the 10,000
students, 30% of the students are members of a sorority or fraternity (greeks) and
70% are independents. There is an upcoming election for Head of the student
1.7. SIMULATION
62
governance organization. Two candidates are running, D and E. Let
θG = proportion of greeks supporting D
θI = proportion of independents supporting D
θ = proportion of all students supporting D
A poll is commisioned to estimate θ and it is agreed that the pollster will sample
100 students. Three different procedures are proposed.
1. Randomly sample 100 students. Estimate
θ̂1 = proportion of polled students who favor D
2. Randomly sample 100 students. Estimate
θ̂G = proportion of polled greeks supporting D
θ̂I = proportion of polled independents supporting D
θ̂2 = .3θ̂G + .7θ̂I
3. Randomly sample 30 greeks and 70 independents. Estimate
θ̂G = proportion of polled greeks supporting D
θ̂I = proportion of polled independents supporting D
θ̂3 = .3θ̂G + .7θ̂I
Which procedure is best? One way to answer the question is by exact calculation,
but another way is by simulation. In the simulation we try each procedure many
times to see how accurate it is, on average. We must choose some “true” values
of θG , θI and θ under which to do the simulation. Here is some R code for the
simulation.
# choose "true" theta.g and theta.i
theta.g <- .8
theta.i <- .4
prop.g <- .3
prop.i <- 1 - prop.g
theta
<- prop.g * theta.g + prop.i * theta.i
1.7. SIMULATION
sampsize <- 100
n.times <- 1000 # should be enough
theta.hat <- matrix ( NA, n.times, 3 )
for ( i in 1:n.times ) {
theta.hat[i,1] <- sim.1()
theta.hat[i,2] <- sim.2()
theta.hat[i,3] <- sim.3()
}
print ( apply(theta.hat,2,mean) )
boxplot ( theta.hat ~ col(theta.hat) )
sim.1 <- function() {
x <- rbinom(1,sampsize,theta)
return ( x / sampsize )
}
sim.2 <- function() {
n.g <- rbinom ( 1, sampsize, prop.g )
n.i <- sampsize - n.g
x.g <- rbinom ( 1, n.g, theta.g )
x.i <- rbinom ( 1, n.i, theta.i )
t.hat.g <- x.g / n.g
t.hat.i <- x.i / n.i
return ( prop.g * t.hat.g + (1-prop.g) * t.hat.i )
}
sim.3 <- function() {
n.g <- sampsize * prop.g
n.i <- sampsize * prop.i
x.g <- rbinom ( 1, n.g, theta.g )
x.i <- rbinom ( 1, n.i, theta.i )
t.hat.g <- x.g / n.g
t.hat.i <- x.i / n.i
return ( prop.g * t.hat.g + (1-prop.g) * t.hat.i )
}
63
1.7. SIMULATION
64
• apply applies a function to a matrix. In the code above, apply(...) applies
the function mean to dimension 2 of the matrix theta.hat. That is, it returns
the mean of of each column of theta.hat
0.35 0.50 0.65
The boxplot, shown in Figure 1.20 shows little practical difference between the
three procedures.
1
2
3
Figure 1.20: 1000 simulations of θ̂ under three possible procedures for conducting
a poll
The next example shows how simulation was used to evaluate whether an experiment was worth carrying out.
Example 1.12 (FACE)
The amount of carbon dioxide, or CO2 , in the Earth’s atmosphere has been steadily
increasing over the last century or so. You can see the increase yourself in the co2
data set that comes with R. Typing ts.plot(co2) makes a time series plot, reproduced
here as Figure 1.21. Typing help(co2) gives a brief explanation. The data are the
concentrations of CO2 in the atmosphere measured at Mauna Loa each month from
1959 to 1997. The plot shows a steadily increasing trend imposed on a regular annual
cycle. The primary reason for the increase is burning of fossil fuels. CO2 is a greenhouse
gas that traps heat in the atmosphere instead of letting it radiate out, so an increase in
atmospheric CO2 will eventually result in an increase in the Earth’s temperature. But
1.7. SIMULATION
65
what is harder to predict is the effect on the Earth’s plants. Carbon is a nutrient needed
by plants. It is possible that an increase in CO2 will cause an increase in plant growth
which in turn will partly absorb some of the extra carbon.
To learn about plant growth under elevated CO2 , ecologists began by conducting
experiments in greenhouses. In a greenhouse, two sets of plants could be grown under
conditions that are identical except for the amount of CO2 in the atmosphere. But the
controlled environment of a greenhouse is quite unlike the uncontrolled natural environment, so, to gain verisimilitude, experiments soon moved to open-top chambers. An
open-top chamber is a space, typically a few meters in diameter, enclosed by a solid,
usually plastic, wall and open at the top. CO2 can be added to the air inside the chamber. Because the chamber is mostly enclosed, not much CO2 will escape, and more can
be added as needed. Some plants can be grown in chambers with excess CO2 others in
chambers without and their growth compared. But as with greenhouses, open-top chambers are not completely satisfactory. Ecologists wanted to conduct experiments under
even more natural conditions.
To that end, in the late 1980’s the Office of Biological and Environmental Research
in the U.S. Department of Energy (DOE) began supporting research using a technology called FACE, or Free Air CO2 Enrichment developed at the Brookhaven National
Laboratory. As the lab’s webpage www.face.bnl.gov/face1.htm explains
“FACE provides a technology by which the microclimate around growing
plants may be modified to simulate climate change conditions. Typically
CO2-enriched air is released from a circle of vertical pipes into plots up to
30m in diameter, and as tall as 20 m.
“Fast feedback control and pre-dilution of CO2 provide stable, elevated
[CO2] simulating climate change conditions.
“No containment is required with FACE equipment and there is no significant change in natural air-flow. Large FACE plots reduce effects of plot edge
and capture fully-functioning, integrated ecosystem-scale processes. FACE
Field data represent plant and ecosystems responses to concentrations of
atmospheric CO2 expected in the mid-twenty-first century.”
See the website for pictures and more information. In a FACE experiment, CO2 is released
into some treatment plots. The level of CO2 inside the plot is continually monitored.
More CO2 is released as needed to keep the amount of CO2 in the atmosphere at some
prespecified level, typically the level that is expected in the mid-21st century. Other plots
are reserved as control plots. Plant growth in the treatment plots is compared to that in
the control plots.
1.7. SIMULATION
66
(b)
!2
0
resids
340
!4
320
co2
2
360
4
(a)
1980
1960
1980
Time
Time
(c)
(d)
320
340
co2
0
!3 !2 !1
cycle
1
2
360
3
1960
2 4 6 8
Index
12
1960
1980
Time
Figure 1.21: Monthly concentrations of CO2 at Mauna Loa
1.7. SIMULATION
67
Because a FACE site is not enclosed, CO2 continually drifts out of the site and needs
to be replenished. Keeping enough CO2 in the air is very costly and is, in fact, the major
expense in conducting FACE experiments.
The first several FACE sites were in Arizona (sorghum, wheat, cotton), Switzerland
(rye grass, clover) and California (native chaparral). All of these contained low-growing
plants. By the early 1990’s, ecologists wanted to conduct a FACE experiment in a forest,
and such an experiment was proposed by investigators at Duke University, to take place in
Duke Forest. But before the experiment could be funded the investigators had to convince
the Department of Energy (DOE) that it would be worthwhile. In particular, they wanted
to demonstrate that the experiment would have a good chance of uncovering whatever
growth differences would exist between treatment and control. The demonstration was
carried out by computer simulation. The code for that demonstration, slightly edited for
clarity, is given at the end of this Example and explained below.
1. The experiment would consist of 6 sites, divided into 3 pairs. One site in each pair
would receive the CO2 treatment; the other would be a control. The experiment
was planned to run for 10 years. Investigators had identified 16 potential sites
in Duke Forest. The above ground biomass of those sites, measured before the
experiment began, is given in the line b.mass <- c ( ... ).
2. The code simulates 1000 repetitions of the experiment. That’s the meaning of
nreps <- 1000.
3. The above ground biomass of each site is stored in M.actual.control and
M.actual.treatment. There must be room to store the biomass of each site
for every combination of (pair,year,repetition). The array(...) command creates a multidimensional matrix, or array, filled with NA’s. The dimensions are given
by c(npairs,nyears+1,nreps).
4. A site’s actual biomass is not known exactly but is measured with error. The
simulated measurements are stored in M.observed.control and
M.observed.treatment.
5. Each repetition begins by choosing 6 sites from among the 16 available. Their observed biomass goes into temp. The first three values are assigned to M.observed.control
and the last three to M.observed.treatment. All this happens in a loop for(i in
1:nreps).
6. Investigators expected that control plots would grow at an average rate of 2% per
year and treatment plots at an average of something else. Those values are called
1.7. SIMULATION
68
betaC and betaT. The simulation was run with betaT = 1.04, 1.06, 1.08 (shown
below) and 1.10. Each site would have its own growth rate which would be slightly
different from betaC or betaT. For control sites, those rates are drawn from the
N(betaC, 0.1∗(betaC−1)) distribution and stored in beta.control, and similarly
for the treatment sites.
7. Measurement errors of biomass were expected to have an SD around 5%. That’s
sigmaE. But at each site in each year the measurement error would be slightly
different. The measurement errors are drawn from the N(1, sigmaE) distribution
and stored in errors.control and errors.treatment.
8. Next we simulate the actual biomass of the sites. For the first year where we
already have measurements that’s
M.actual.control [ , 1, ] <- ...
M.actual.treatment [ , 1, ] <- ...
For subsequent years the biomass in year i is the biomass in year i-1 multiplied
by the growth factor beta.control or beta.treatment. Biomass is simulated
in the loop for(i in 2:(nyears+1)).
9. Measured biomass is the actual biomass multiplied by measurement error. It is
simulated by
M.observed.control
<M.observed.treatment <-
...
...
10. The simulations for each year were analyzed each year by a two-sample t-test which
looks at the ratio
biomass in year i
biomass in year 1
to see whether it is significantly larger for treatment sites than for control sites. See
Section xyz for details about t-tests. For our purposes here, we have replaced the
t-test with a plot, Figure 1.22, which shows a clear separation between treatment
and control sites after about 5 years.
The DOE did decide to fund the proposal for a FACE experiment in Duke Forest, at least
partly because of the demonstration that such an experiment would have a reasonably
large chance of success.
69
1.5
1.0
growth rate
2.0
1.7. SIMULATION
2
4
6
8
10
year
Figure 1.22: 1000 simulations of a FACE experiment. The x-axis is years. The
y-axis shows the mean growth rate (biomass in year i / biomass in year 1) of
control plants (lower solid line) and treatment plants (upper solid line). Standard
deviations are shown as dashed lines.
1.7. SIMULATION
70
########################################################
# A power analysis of the FACE experiment
#
# Initial measured biomass of potential FACE sites in g/m2:
b.mass <- c ( 17299.1, 17793.1, 23211.7, 23351.8, 24278,
25335.9, 27001.5, 27113.6, 30184.3, 30625.5,
33496.2, 33733.76, 35974.3, 38490.8, 40319.6,
44903 )
npairs <- 3
nyears <- 10
nreps <- 1000
M.observed.control
M.actual.control
M.observed.treatment
M.actual.treatment
<<<<-
array
array
array
array
(
(
(
(
NA,
NA,
NA,
NA,
c(npairs,nyears+1,nreps)
c(npairs,nyears+1,nreps)
c(npairs,nyears+1,nreps)
c(npairs,nyears+1,nreps)
# Specify the initial levels of biomass
for ( i in 1:nreps ) {
temp <- sample ( b.mass, size=2*npairs )
M.observed.control
[,1,i] <- temp [1:npairs]
M.observed.treatment [,1,i] <- temp [(npairs+1):(2*npairs)]
}
# Specify the betas
betaC <- 1.02
betaT <- 1.08
beta.control
<- matrix ( rnorm ( npairs*nreps,
0.1*(betaC-1)
npairs, nreps )
beta.treatment <- matrix ( rnorm ( npairs*nreps,
0.1*(betaT-1)
npairs, nreps )
betaC,
),
betaT,
),
)
)
)
)
1.7. SIMULATION
#############################################################
# measurement errors in biomass
sigmaE <- 0.05
errors.control
<- array ( rnorm ( npairs*(nyears+1)*nreps,
1, sigmaE ),
c(npairs,nyears+1,nreps) )
errors.treatment <- array ( rnorm ( npairs*(nyears+1)*nreps,
1, sigmaE ),
c(npairs,nyears+1,nreps) )
##############################################################
##############################################################
# Generate 10 years of data. The model for generation is:
# M.actual[i,j,] : above ground biomass in ring i, year j
# M.actual[i,j+1,] = beta[i] * M.actual[i,j,]
# We actually observe M.observed[i,j] = M.actual[i,j] * error
# Start with M.observed[i,1] and generate M.actual[i,1]
M.actual.control [ , 1, ] <M.observed.control [ , 1, ] / errors.control[ , 1, ]
M.actual.treatment [ , 1, ] <M.observed.treatment [ , 1, ] / errors.treatment[ , 1, ]
# Now, for the rest of the years, generate M.actual
for ( i in 2:(nyears+1) ) {
M.actual.control [ , i, ] <M.actual.control [ , i-1, ] * beta.control
M.actual.treatment [ , i, ] <M.actual.treatment [ , i-1, ] * beta.treatment
}
# The initial observed data, corresponding to the [,1,],
# doesn’t need to be recomputed. But the following two
# statements are cleaner without subscripts.
M.observed.control
<- M.actual.control
* errors.control
71
1.8. R
72
M.observed.treatment <- M.actual.treatment * errors.treatment
##############################################################
##############################################################
# two-sample t-test on (M.observed[j]/M.observed[1]) removed
# plot added
ratio.control
<- matrix ( NA, nyears, npairs*nreps )
ratio.treatment <- matrix ( NA, nyears, npairs*nreps )
for ( i in 2:(nyears+1) ) {
ratio.control [ i-1, ]
<as.vector (
M.observed.control[,i,]
/ M.observed.control[,1,] )
ratio.treatment [ i-1, ] <as.vector (
M.observed.treatment[,i,]
/ M.observed.treatment[,1,] )
}
mean.control
mean.treatment
sd.control
sd.treatment
<<<<-
apply ( ratio.control,
1, mean )
apply ( ratio.treatment, 1, mean )
sqrt ( apply ( ratio.control,
1, var ) )
sqrt ( apply ( ratio.treatment, 1, var ) )
plot ( 2:11, mean.control, type="l", ylim=c(.9,2.4),
xlab="year", ylab="growth rate" )
lines ( 2:11, mean.treatment )
lines ( 2:11, mean.control - sd.control, lty=2 )
lines ( 2:11, mean.control + sd.control, lty=2 )
lines ( 2:11, mean.treatment - sd.treatment, lty=2 )
lines ( 2:11, mean.treatment + sd.treatment, lty=2 )
1.8
R
This section introduces a few more of the R commands we will need to work fluently with the software. They are introduced in the context of studying a dataset
on the percent bodyfat of 252 men. You should download the data onto your
1.8. R
73
own computer and try out the analysis in R to develop your familiarity with what
will prove to be a very useful tool. The data can be found at StatLib, an online repository of statistical data and software. The data were originally contributed by Roger Johnson of the Department of Mathematics and Computer Science at the South Dakota School of Mines and Technology. The StatLib website is
lib.stat.cmu.edu. If you go to StatLib and follow the links to datasets and then
bodyfat you will find a file containing both the data and an explanation. Copy just
the data to a text file named bodyfat.dat on your own computer. The file should
contain just the data; the first few lines should look like this:
1.0708
1.0853
1.0414
12.3
6.1
25.3
23 ...
22 ...
22 ...
The following snippet shows how to read the data into R and save it into bodyfat.
bodyfat <- read.table ( "bodyfat.dat",
col.names = c ( "density", "percent.fat", "age", "weight",
"height", "neck.circum", "chest.circum", "abdomen.circum",
"hip.circum", "thigh.circum", "knee.circum", "ankle.circum",
"bicep.circum", "forearm.circum", "wrist.circum" ) )
dim
( bodyfat )
# how many rows and columns in the dataset?
names ( bodyfat )
# names of the columns
• read.table(...) reads data from a text file into a dataframe. A dataframe
is a flexible way to represent data because it can be treated as either a matrix or a list. Type help(read.table) to learn more. The first argument,
"bodyfat.dat", tells R what file to read. The second argument, col.names =
c ( "density", ... ), tells R the names of the columns.
• dim gives the dimension of a matrix, a dataframe, or anything else that has a
dimension. For a matrix or dataframe, dim tells how many rows and columns.
• names gives the names of things. names(bodyfat) should tell us the names
density, percent.fat, . . . . It’s used here to check that the data were read
the way we intended.
Individual elements of matrices can be accessed by two-dimensional subscripts
such as bodyfat[1,1] or bodyfat[3,7] in which the subscripts refer to the row
and column of the matrix. (Try this out to make sure you know how two dimensional subscripts work.) If the columns of the matrix have names, then the second
1.8. R
74
subscript can be a name, as in bodyfat[1,"density"] or bodyfat[3,"chest.circum"].
Often we need to refer to an entire column at once, which can be done by omitting the first subscript. For example, bodyfat[,2] refers to the entire set of 252
measurements of percent body fat.
A dataframe is a list of columns. Because bodyfat has 15 columns its length,
length(bodyfat), is 15. Members of a list can be accessed by subscripts with
double brackets, as in bodyfat[[1]]. Each member of bodyfat is a vector of
length 252. Individual measurements can be accessed as in bodyfat[[1]][1] or
bodyfat[[3]][7]. If the list members have names, then they can be accessed as
in bodyfat$percent.fat. Note the quotation marks used when treating bodyfat
as a matrix and the lack of quotation marks when treating bodyfat as a list. The
name following the "$" can be abbreviated, as long as the abbreviation is unambiguous. Thus bodyfat$ab works, but bodyfat$a fails to distinguish between age
and abdomen.circum.
Begin by displaying the data.
par ( mfrow=c(5,3) )
# establish a 5 by 3 array of plots
for ( i in 1:15 ) {
hist ( bodyfat[[i]], xlab="", main=names(bodyfat)[i] )
}
Although it’s not our immediate purpose, it’s interesting to see what the relationships are among the variables. Try pairs(bodyfat).
To illustrate some of R’s capabilities and to explore the concepts of marginal,
joint and conditional densities, we’ll look more closely at percent fat and its relation
to abdomen circumference. Begin with a histogram of percent fat.
fat <- bodyfat$per # give these two variables short names
abd <- bodyfat$abd # so we can refer to them easily
par ( mfrow=c(1,1) ) # just need one plot now, not 15
hist ( fat )
We’d like to rescale the vertical axis to make the area under the histogram equal
to 1, as for a density. R will do that by drawing the histogram on a “density” scale
instead of a “frequency” scale. While we’re at it, we’ll also make the labels prettier.
We also want to draw a Normal curve approximation to the histogram, so we’ll
need the mean and standard deviation.
hist ( fat, xlab="", main="percent fat", freq=F )
1.8. R
mu <sigma
lo <hi <x <lines
75
mean ( fat )
<- sqrt ( var ( fat )) # standard deviation
mu - 3*sigma
mu + 3*sigma
seq ( lo, hi, length=50 )
( x, dnorm ( x, mu, sigma ) )
That looks better, but we can do better still by slightly enlarging the axes. Redraw
the picture, but use
hist ( fat, xlab="", main="percent fat", freq=F,
xlim=c(-10, 60), ylim=c(0,.06) )
The Normal curve fits the data reasonably well. A good summary of the data is
that it is distributed approximately N(19.15, 8.37).
Now examine the relationship between abdomen circumference and percent
body fat. Try the following command.
plot ( abd, fat, xlab="abdomen circumference",
ylab="percent body fat" )
The scatter diagram shows a clear relationship between abdomen circumference
and body fat in this group of men. One man doesn’t fit the general pattern; he
has a circumference around 148 but a body fat only around 35%, relatively low
for such a large circumference. To quantify the relationship between the variables,
let’s divide the men into groups according to circumference and estimate the conditional distribution of fat given circumference. If we divide the men into twelfths
we’ll have 21 men per group.
cut.pts <- quantile ( abd, (0:12)/12 )
groups <- cut ( abd, cut.pts, include.lowest=T, labels=1:12 )
boxplot ( fat ~ groups,
xlab="quantiles of abdomen circumference",
ylab="percent body fat" )
Note:
• A quantile is a generalization of median. For example, the 1/12-th quantile of
abd is the number q such that 1/12 of all the abd measurements are less than
q and 11/12 are greater than q. (A more careful definition would say what
to do in case of ties.) The median is the .5 quantile. We have cut our data
according to the 1/12, 2/12, . . . , 12/12 quantiles of abd.
1.8. R
76
• If you don’t see what the cut(abd,...) command does, print out cut.pts
and groups, then look at them until you figure it out.
• Boxplots are a convenient way to compare different groups of data. In this
case there are 12 groups. Each group is represented on the plot by a box with
whiskers. The box spans the first and third quartiles (.25 and .75 quantiles)
of fat for that group. The line through the middle of the box is the median
fat for that group. The whiskers extend to cover most of the rest of the data.
A few outlying fat values fall outside the whiskers; they are indicated as
individual points.
• "fat ˜ groups" is R’s notation for a formula. It means to treat fat as a function of groups. Formulas are extremely useful and will arise repeatedly.
The medians increase in not quite a regular pattern. The irregularities are
probably due to the vagaries of sampling. We can find the mean, median and
variance of fat for each group with
mu.fat <- tapply ( fat,
me.fat <- tapply ( fat,
sd.fat <- sqrt ( tapply
cbind ( mu.fat, me.fat,
groups, mean )
groups, median )
( fat, groups, var ) )
sd.fat )
• tapply means "apply to every element of a table." In this case, the table is
fat, grouped according to groups.
• cbind means "bind together in columns". There is an analgous command
rbind.
Finally, let’s make a figure similar to Figure 1.12.
x <- seq ( 0, 50, by=1 )
par ( mfrow=c(4,3) )
for ( i in 1:12 )
good <- groups == i
hist ( fat[good], xlim=c(0,50), ylim=c(0,.1),
breaks=seq(0,50,by=5), freq=F,
xlab="percent fat", main="" )
y <- dnorm ( x, mu.fat[i], sd.fat[i] )
lines ( x, y )
1.9. SOME RESULTS FOR LARGE SAMPLES
77
The Normal curves seem to fit well. We saw earlier that the marginal (Marginal
means unconditional.) distribution of percent body fat is well approximated by
N(19.15, 8.37). Here we see that the conditional distribution of percent body fat,
given that abdomen circumference is in between the (i − 1)/12 and i/12 quantiles
is N(mu.fat[i], sd.fat[i]). If we know a man’s abdomen circumference even
approximately then (1) we can estimate his percent body fat more accurately and
(2) the typical estimation error is smaller. [add something about estimation
error in the sd section]
1.9
Some Results for Large Samples
It is intuitively obvious that large samples are better than small, that more data
is better than less, and, less obviously, that with enough data one is eventually
led to the right answer. These intuitive observations have precise mathematical
statements in the form of Theorems 1.12, 1.13 and 1.14. We state those theorems
here so we can use them throughout the rest of the book. They are examined in
more detail in Section 7.9.
Definition 1.9 (Random Sample). A collection y1 , . . . , yn of random variables is
said to be a random sample of size n from pdf or pmf f if and only if
1. yi ∼ f for each i = 1, 2, . . . , n and
2. the yi ’s are mutually independent, i.e. f (y1 , . . . , yn ) =
Qn
i=1
f (yi ).
The collection (y1 , . . . , yn ) is called a data set. We write
y1 , . . . , yn ∼ i.i.d. f
where i.i.d. stands for independent and identically distributed.
Many introductory statistics texts describe how to collect random samples, many
pitfalls that await, and many pratfalls taken in the attempt. We omit that discussion
here and refer the interested reader to our favorite introductory text on the subject,
Freedman et al. [1998] which has an excellent description of random sampling in
general as well as detailed discussion of the US census and the Current Population
Survey.
R
R
Suppose y1 , y2 , . . . , ∼ i.i.d. f . Let µ = yf (y) dy and σ 2 = (y − µ)2 f (y) dy
be the mean and variance of f . Typically µ and σ are unknown and we take the
sample in order to learn about them. We will often use ȳn ≡ (y1 + · · · + yn )/n, the
mean of the first n observations, to estimate µ. Some questions to consider are
1.9. SOME RESULTS FOR LARGE SAMPLES
78
• For a sample of size n, how accurate is ȳn as an estimate of µ?
• Does ȳn get closer to µ as n increases?
• How large must n be in order to achieve a desired level of accuracy?
Theorems 1.12 and 1.14 provide answers to these questions. Before stating them
we need some preliminary results about the mean and variance of ȳn .
Theorem 1.7. Let x1 , . . . , xn be random variables with means µ1 , . . . , µn . Then E[x1 +
· · · + xn ] = µ 1 + · · · + µ n .
Proof. It suffices to prove the case n = 2.
Z Z
E[x1 + x2 ] =
(x1 + x2 )f (x1 , x2 ) dx1 dx2
ZZ
ZZ
=
x1 f (x1 , x2 ) dx1 dx2 +
x2 f (x1 , x2 ) dx1 dx2
= µ1 + µ2
Corollary 1.8. Let y1 , . . . , yn be a random sample from f with mean µ. Then E[ȳn ] =
µ.
Proof. The corollary follows from Theorems 1.3 and 1.7.
Theorem 1.9. Let x1 , . . . , xn be independent random variables with means
µ1 , . . . , µn and SDs σ1 , . . . , σn . Then Var[x1 + · · · + xn ] = σ12 + · · · + σn2 .
Proof. It suffices to prove the case n = 2. Using Theorem 1.2,
Var(X1 + X2 ) = E((X1 + X2 )2 ) − (µ1 + µ2 )2
= E(X12 ) + 2E(X1 X2 ) + E(X22 ) − µ21 − 2µ1 µ2 − µ22
= E(X12 ) − µ21 + E(X22 ) − µ22 + 2 (E(X1 X2 ) − µ1 µ2 )
= σ12 + σ22 + 2 (E(X1 X2 ) − µ1 µ2 ) .
But if X1 ⊥ X2 then
ZZ
E(X1 X2 ) =
x1 x2 f (x1 , x2 ) dx1 dx2
Z
Z
= x1 x2 f (x2 ) dx2 f (x1 ) dx1
Z
= µ2 x1 f (x1 ) dx1 = µ1 µ2 .
So Var(X1 + X2 ) = σ12 + σ22 .
1.9. SOME RESULTS FOR LARGE SAMPLES
79
Note that Theorem 1.9 requires independence while Theorem 1.7 does not.
Corollary 1.10. Let y1 , . . . , yn be a random sample from f with variance σ 2 . Then
Var(ȳn ) = σ 2 /n.
Proof. The corollary follows from Theorems 1.4 and 1.9.
Theorem 1.11 (Chebychev’s Inequality). Let X be a random variable with mean µ
and SD σ. Then for any > 0,
P[|X − µ| ≥ ] ≤ σ 2 /2 .
Proof.
Z
2
(x − µ)2 f (x) dx
σ =
µ−
Z
µ+
Z
2
2
(x − µ) f (x) dx +
=
−∞
µ−
Z
Z
−∞
≥ 2
Z
∞
(x − µ) f (x) dx +
µ−
∞
(x − µ)2 f (x) dx +
≥
Z
(x − µ)2 f (x) dx
µ+
(x − µ)2 f (x) dx
µ+
µ−
f (x) dx + 2
−∞
Z
∞
f (x) dx
µ+
= 2 P[|X − µ| ≥ ].
Theorems 1.12 and 1.14 are the two main limit theorems of statistics. They
provide answers, at least probabilistically, to the questions on page 77.
Theorem 1.12 (Weak Law of Large Numbers). Let y1 , . . . , yn be a random sample
from a distribution with mean µ and variance σ 2 . Then for any > 0,
lim P[|ȳn − µ| < ] = 1.
(1.18)
n→∞
Proof. Apply Chebychev’s Inequality (Theorem 1.11) to ȳn .
lim P[|ȳn − µ| < ] = lim 1 − P[|ȳn − µ| ≥ ] ≥ lim 1 − σ 2 /n2 = 1.
n→∞
n→∞
n→∞
Another version of Theorem 1.12 is called the Strong Law of Large Numbers.
1.9. SOME RESULTS FOR LARGE SAMPLES
80
Theorem 1.13 (Strong Law of Large Numbers). Let y1 , . . . , yn be a random sample
from a distribution with mean µ and variance σ 2 . Then for any > 0,
P[ lim |Ȳn − µ| < ] = 1;
n→∞
i.e.,
P[ lim Ȳn = µ] = 1.
n→∞
It is beyond the scope of this section to explain the difference between the
WLLN and the SLLN. See Section 7.9.
Theorem 1.14 (Central Limit Theorem). Let y1 , . . . , y√
n be a random sample from f
2
with mean µ and variance σ . Let zn = (ȳn − µ)/(σ/ n). Then, for any numbers
a < b,
Z b
1
2
√ e−w /2 dw.
lim P[zn ∈ [a, b]] =
n→∞
2π
a
I.e. The limiting distribution of zn is N(0, 1).
The Law of Large Numbers is what makes simulations work and why large
samples are better than small. It says that as the number of simulation grows or
as the sample size grows, (n → ∞), the average of the simulations or the average
of the sample gets closer and closer to the true value (X̄n → µ). For instance, in
Example 1.11, where we used simulation to estimate P[Shooter wins] in Craps, the
estimate became more and more accurate as the number of simulations increased
from 50, to 200, and then to 1000. The Central Limit Theorem helps us look at
those simulations more closely.
Colloquially, the Central Limit Theorem says that
lim pzn = N(0, 1).
n→∞
Its practical application is that, for large n,
pzn ≈ N(0, 1),
which in turn means
√
pȳn ≈ N(µ, σ/ n).
In Example 1.11 we simulated the game of Craps for n.sim = 50, 200, and
1000. Those simulations are depicted in Figure 1.23. The upper panel shows
1.10. EXERCISES
81
a histogram of 1000 simulations, all using n.sim = 50. For a single simulation
with n.sim = 50 let X1 , . . . , X50 be√the outcomes of those simulations. Each Xi ∼
Bern(.493), so µ = .493 and σ = .493 ∗ .507 ≈ .5. Therefore, according to the
Central Limit Theorem, when n.sim = 50
√
X̄n ∼ N(µ, σ/ n) ≈ N(.493, .071)
This is the Normal density plotted in the upper panel of Figure 1.23. We see that
the N(.493, .071) is a good approximation to the histogram. And that’s because
θ̂ = X̄50 ∼ N(.493, .071), approximately. The Central Limit Theorem says that the
approximation will be good for “large” n. In this case n = 50 is large enough.
(Section 7.1.4 will discuss the question of when n is “large enough”.)
Similarly,
X̄n ∼ N(.493, .035)
X̄n ∼ N(.493, .016)
when n.sim = 200
when n.sim = 1000.
These densities are plotted in the middle and lower panels of Figure 1.23.
The Central Limit Theorem makes three statements about the distribution of ȳn
(zn ) in large samples:
1. E[ȳn ] = µ (E[zn ] = 0),
√
2. SD(ȳn ) = σ/ n (SD(zn ) = 1), and
3. ȳn (zn ) has, approximately, a Normal distribution.
The first two of these are already known from Theorems 1.7 and 1.9. It’s the third
point that is key to the Central Limit Theorem. Another surprising implication from
the Central Limit Theorem is that the distributions of ȳn and zn in large samples
are determined solely by µ and σ; no other features of f matter.
1.10
Exercises
1. Show: if µ is a probability measure then for any integer n ≥ 2, and disjoint
sets A1 , . . . , An
n
n
[
X
µ( Ai ) =
µ(Ai ).
i=1
2. Simulating Dice Rolls
i=1
82
0 1 2 3 4 5 6
Density
1.10. EXERCISES
0.3
0.4
0.5
0.6
0.7
0.6
0.7
0.6
0.7
6
4
0
2
Density
8 10
theta hat
n.sim = 50
0.3
0.4
0.5
10
0
5
Density
20
theta hat
n.sim = 200
0.3
0.4
0.5
theta hat
n.sim = 1000
Figure 1.23: Histograms of craps simulations. Solid curves are Normal approximations according to the Central Limit Theorem.
1.10. EXERCISES
83
(a) simulate 6000 dice rolls. Count the number of 1’s, 2’s, . . . , 6’s.
(b) You expect about 1000 of each number. How close was your result to
what you expected?
(c) About how often would you expect to get more than 1030 1’s? Run an
R simulation to estimate the answer.
3. The Game of Risk In the board game Risk players place their armies in different countries and try eventually to control the whole world by capturing
countries one at a time from other players. To capture a country, a player
must attack it from an adjacent country. If player A has A ≥ 2 armies in
country A, she may attack adjacent country D. Attacks are made with from 1
to 3 armies. Since at least 1 army must be left behind in the attacking country,
A may choose to attack with a minimum of 1 and a maximum of min(3, A − 1)
armies. If player D has D ≥ 1 armies in country D, he may defend himself
against attack using a minimum of 1 and a maximum of min(2, D) armies.
It is almost always best to attack and defend with the maximum permissible
number of armies.
When player A attacks with a armies she rolls a dice. When player D defends
with d armies he rolls d dice. A’s highest die is compared to D’s highest. If
both players use at least two dice, then A’s second highest is also compared
to D’s second highest. For each comparison, if A’s die is higher than D’s then
A wins and D removes one army from the board; otherwise D wins and A
removes one army from the board. When there are two comparisons, a total
of two armies are removed from the board.
• If A attacks with one army (she has two armies in country A, so may
only attack with one) and D defends with one army (he has only one
army in country D) what is the probability that A will win?
• Suppose that Player 1 has two armies each in countries C1 , C2 , C3 and
C4 , that Player 2 has one army each in countries B1 , B2 , B3 and B4 , and
that country Ci attacks country Bi . What is the chance that Player 1 will
be successful in at least one of the four attacks?
4. (a) Justify the last step of Equation 1.2.
(b) Justify the last step of the proof of Theorem 1.1.
(c) Prove Theorem 1.1 when g is a decreasing function.
1.10. EXERCISES
84
5. Y is a random variable. Y ∈ (−1, 1). The pdf is p(y) = ky 2 for some constant,
k.
(a) Find k.
(b) Use R to plot the pdf.
(c) Let Z = −Y . Find the pdf of Z. Plot it.
6. U is a random variable on the interval [0, 1]; p(u) = 1.
(a) V = U 2 . On what interval does V live? Plot V as a function of U . Find
the pdf of V . Plot pV (v) as a function of v.
(b) W = 2U . On what interval does W live? Plot W as a function of U . Find
the pdf of W . Plot pW (w) as a function of w.
(c) X = − log(U ). On what interval does X live? Plot X as a function of U .
Find the pdf of X. Plot pX (x) as a function of x.
7. Let X ∼ Exp(λ) and let Y = cX for some constant c.
(a) Write down the density of X.
(b) Find the density of Y .
(c) Name the distribution of Y .
8. A teacher randomly selects a student from a Sta 103 class. Let X be the number of math courses the student has completed. Let Y = 1 if the student is
female and Y = 0 if the student is male. Fifty percent of the class is female.
Among the women, thirty percent have completed one math class, forty percent have completed two math classes and thirty percent have completed
three. Among the men, thirty percent have completed one math class, fifty
percent have completed two math classes and twenty percent have completed
three.
(a) True or False: X and Y are independent.
(b) Find E[X|Y = 1].
9. Sue is studying the Bin(25,.4) distribution. In R she types
y <- rbinom(50, 25, .4)
m1 <- mean(y)
m2 <- sum(y) / 25
1.10. EXERCISES
85
m3 <- sum ( (y-m1)^2 ) / 50
(a) Is y a number, a vector or a matrix?
(b) What is the approximate value of m1?
(c) What is the approximate value of m2?
(d) What was Sue trying to estimate with m3?
10. The random variables X and Y have joint pdf fX,Y (x, y) = 1 in the triangle of
the XY -plane determined by the points (-1,0), (1,0), and (0,1). Hint: Draw
a picture.
(a) Find fX (.5).
(b) Find fY (y).
(c) Find fY | X (y | X = .5).
(d) Find E[Y | X = .5].
(e) Find fY (.5).
(f) Find fX (x).
(g) Find fX | Y (x | Y = .5).
(h) Find E[X | Y = .5].
11. X and Y are uniformly distributed in the unit disk. I.e., the joint density
p(x, y) is constant on the region of R2 such that x2 + y 2 ≤ 1.
(a) Find p(x, y).
(b) Are X and Y independent?
(c) Find the marginal densities p(x) and p(y).
(d) Find the conditional densities p(x | y) and p(y | x).
(e) Find E[X], E[X | Y = .5], and E[X | Y = −.5].
12. Verify the claim in Example 1.4 that argmaxλ P[x = 3 | λ] = 3. Hint: differentiate Equation 1.6.
R
13. (a) p is the pdf of a continuous random variable w. Find R p(s) ds.
R
(b) Find R p(s) ds for the pdf in Equation 1.7.
1.10. EXERCISES
86
14. Page 7 says “Every pdf must satisfy two properties . . . ” and that one of them
is “p(y) ≥ 0 for all y.” Explain why that’s not quite right.
15.
1 2
1
p(y) = √ e− 2 y
2π
is the pdf of a continuous random variable y. Find
R0
−∞
p(s) ds.
16. When spun, an unbiased spinner points to some number y ∈ (0, 1]. What is
p(y)?
17. Some exercises on the densities of tranformed variables. One of them should
illustrate the need for the absolute value of the Jacobian.
18. (a) Prove: if X ∼ Poi(λ) then E(X) = λ. Hint: use the same trick we used
to derive the mean of the Binomial distribution.
(b) Prove: if X ∼ N(µ, σ) then E(X) = µ. Hint: change variables in the
integral.
19. (a) Prove: if X ∼ Bin(n, p) then Var(X) = np(1−p). Hint: use Theorem 1.9.
(b) Prove: if X ∼ Poi(λ) then Var(X) = λ. Hint: use the same trick we used
to derive the mean of the Binomial distribution and Theorem 1.2.
(c) If X ∼ Exp(λ), find Var(X). Hint: use Theorem 1.2.
(d) If X ∼ N(µ, σ), find Var(X). Hint: use Theorem 1.2.
20. (a) Justify each step of Equation 1.12.
(b) Justify each step of Equation 1.13. (Hint: integrate by parts.)
21. Let X1 ∼ Bin(50, .1), X2 ∼ Bin(50, .9) and X1 ⊥ X2 . Define Y = X1 + X2 .
Does Y have the Bin(100, .5) distribution? Why or why not?
22. Let X1 ∼ Bin(50, .5), X2 ∼ Bin(50, .5) and X1 ⊥ X2 . Define Y1 = X1 + X2
and Y2 = 2X1 . Which has the bigger mean: Y1 or Y2 ? Which has the bigger
variance: Y1 or Y2 ? Justify your answer.
23. Consider customers arriving at a service counter. Interarrival times often
have a distribution that is approximately exponential with a parameter λ that
depends on conditions specific to the particular counter. I.e., p(t) = λe−λt .
Assume that successive interarrival times are independent of each other. Let
T1 be the arrival time of the next customer and T2 be the additional time until
the arrival of the second customer.
1.10. EXERCISES
87
(a) What is the joint density of (T1 , T2 )?
(b) Let S = T1 + T2 , the time until the next two customers arrive. What is
P[S ≤ 5]; i.e. the probability that at least 2 customers arrive within the
next 5 minutes?
(c) What is E(S)?
24. A gambler plays at a roulette table for two hours betting on Red at each spin
of the wheel. There are 60 spins during the two hour period. What is the
distribution of
(a) z, the number of times the gambler wins,
(b) y, the number of times the gambler loses,
(c) x, the number of times the gambler is jostled by the person standing
behind,
(d) w, the gambler’s net gain?
25. If human DNA contains xxx bases, and if each base mutates with probability
p over the course of a lifetime, what is the average number of mutations per
person? What is the variance of the number of mutations per person?
26. Isaac is in 5th grade. Each sentence he writes for homework has a 90%
chance of being grammatically correct. The correctness of one sentence does
not affect the correctness of any other sentence. He recently wrote a 10
sentence paragraph for a writing assignment. Write a formula for the chance
that no more than two sentences are grammatically incorrect.
27. Teams A and B play each other in the World Series of baseball. Team A has
a 60% chance of winning each game. What is the chance that B wins the
series? (The winner of the series is the first team to win 4 games.)
28. A basketball player shoots ten free throws in a game. She has a 70% chance
of making each shot. If she misses the shot, her team has a 30% chance of
getting the rebound.
(a) Let m be the number of shots she makes. What is the distribution of m?
What are its expected value and variance? What is the chance that she
makes somewhere between 5 and 9 shots, inclusive?
1.10. EXERCISES
88
(b) Let r be the number of rebounds her team gets from her free throws.
What is the distribution of r? What are its expected value and variance?
What is the chance that r ≥ 1?
29. Let (x, y) have joint density
function fx,y . There are two ways to find Ey.
RR
One way is to evaluate
yfx,y (x, y) dxdy. The other is to start
with the joint
R
density fx,y , find the marginal density fy , then evaluate yfy (y) dy. Show
that these two methods give the same answer.
30. Prove Theorem 1.3 (pg. 39) in the discrete case.
31. Prove Theorem 1.7 (pg. 78) in the continuous case.
32. A researcher randomly selects mother-daughter pairs. Let xi and yi be the
heights of the i’th mother and daughter, respectively. True or False:
(a) xi and xj are independent
(b) xi and yj are independent
(c) yi and yj are independent
(d) xi and yi are independent
33. As part of his math homework Isaac had to roll two dice and record the
results. Let X1 be the result of the first die and X2 be the result of the second.
What is the probability that X1=1 given that X1 + X2 = 5?
34. A doctor suspects a patient has the rare medical condition DS, or disstaticularia, the inability to learn statistics. DS occurs in .01% of the population, or
one person in 10,000. The doctor orders a diagnostic test. The test is quite
accurate. Among people who have DS the test yields a positive result 99% of
the time. Among people who do not have DS the test yields a positive result
only 5% of the time.
For the patient in question, the test result is positive. Calculate the probability
that the patient has DS.
35. For various reasons, researchers often want to know the number of people who have participated in embarassing activities such as illegal drug use,
cheating on tests, robbing banks, etc. An opinion poll which asks these questions directly is likely to elicit many untruthful answers. To get around the
problem, researchers have devised the method of randomized response. The
following scenario illustrates the method.
1.10. EXERCISES
89
A pollster identifies a respondent and gives the following instructions. “Toss
a coin, but don’t show it to me. If it lands Heads, answer question (a). If
it lands tails, answer question (b). Just answer ’yes’ or ’no’. Do not tell me
which question you are answering.
Question (a): Does your telephone number end in an even digit?
Question (b): Have you ever used cocaine?”
Because the respondent can answer truthfully without revealing his or her
cocaine use, the incentive to lie is removed. Researchers hope respondents
will tell the truth.
You may assume that respondents are truthful and that telephone numbers
are equally likely to be odd or even. Let p be the probability that a randomly
selected person has used cocaine.
(a) What is the probability that a randomly selected person answers "yes"?
(b) Suppose we survey 100 people. Let X be the number who answer "yes".
What is the distribution of X?
36. In a 1991 article (See Utts [1991] and discussants.) Jessica Utts reviews some
of the history of probability and statistics in ESP research. This question
concerns a particular series of autoganzfeld experiments in which a sender
looking at a picture tries to convey that picture telepathically to a receiver.
Utts explains:
“. . . ‘autoganzfeld’ experiments require four participants. The first
is the Receiver (R), who attempts to identify the target material being observed by the Sender (S). The Experimenter (E) prepares R
for the task, elicits the response from R and supervises R’s judging
of the response against the four potential targets. (Judging is double blind; E does not know which is the correct target.) The fourth
participant is the lab assistant (LA) whose only task is to instruct
the computer to randomly select the target. No one involved in the
experiment knows the identity of the target.
“Both R and S are sequestered in sound-isolated, electrically
sheilded rooms. R is prepared as in earlier ganzfeld studies, with
white noise and a field of red light. In a nonadjacent room, S
watches the target material on a television and can hear R’s target description (‘mentation’) as it is being given. The mentation is
also tape recorded.
1.10. EXERCISES
90
“The judging process takes place immediately after the 30-minute
sending period. On a TV monitor in the isolated room, R views the
four choices from the target pack that contains the actual target. R
is asked to rate each one according to how closely it matches the
ganzfeld mentation. The ratings are converted to ranks and, if the
correct target is ranked first, a direct hit is scored. The entire process is automatically recorded by the computer. The computer then
displays the correct choice to R as feedback.”
In the series of autoganzfeld experiments analyzed by Utts, there were a total
of 355 trials. Let X be the number of direct hits.
(a) What are the possible values of X?
(b) Assuming there is no ESP, and no cheating, what is the distribution of
X?
(c) Plot the pmf of the distribution in part (b).
(d) Find E[X] and SD(X).
(e) Add a Normal approximation to the plot in part (c).
(f) Judging from the plot in part (c), approximately what values of X are
consistent with the “no ESP, no cheating” hypothesis?
(g) In fact, the total number of hits was x = 122. What do you conclude?
37. This exercise is based on a computer lab that another professor uses to teach
the Central Limit Theorem. It was originally written in MATLAB but here it’s
translated into R.
Enter the following R commands:
u <- matrix ( runif(250000), 1000, 250 )
y <- apply ( u, 2, mean )
These create a 1000x250 (a thousand rows and two hundred fifty columns)
matrix of random draws, called u and a 250-dimensional vector y which contains the means of each column of U.
Now enter the command hist(u[,1]). This command takes the first column
of u (a column vector with 1000 entries) and makes a histogram. Print out
1.10. EXERCISES
91
this histogram and describe what it looks like. What distribution is the runif
command drawing from?
Now enter the command hist(y). This command makes a histogram from
the vector y. Print out this histogram. Describe what it looks like and how
it differs from the one above. Based on the histogram, what distribution do
you think y follows?
You generated y and u with the same random draws, so how can they have
different distributions? What’s going on here?
38. Suppose that extensive testing has revealed that people in Group A have IQ’s
that are well described by a N(100, 10) distribution while the IQ’s of people
in Group B have a N(105, 10) distribution. What is the probability that a randomly chosen individual from Group A has a higher IQ than a randomly chosen
individual from Group B?
(a) Write a formula to answer the question. You don’t need to evaluate the
formula.
(b) Write some R code to answer the question.
39. The so-called Monty Hall or Let’s Make a Deal problem has caused much consternation over the years. It is named for an old television program. A contestant is presented with three doors. Behind one door is a fabulous prize;
behind the other two doors are virtually worthless prizes. The contestant
chooses a door. The host of the show, Monty Hall, then opens one of the
remaining two doors, revealing one of the worthless prizes. Because Monty
is the host, he knows which doors conceal the worthless prizes and always
chooses one of them to reveal, but never the door chosen by the contestant.
Then the contestant is offered the choice of keeping what is behind her original door or trading for what is behind the remaining unopened door. What
should she do?
There are two popular answers.
• There are two unopened doors, they are equally likely to conceal the
fabulous prize, so it doesn’t matter which one she chooses.
• She had a 1/3 probability of choosing the right door initially, a 2/3
chance of getting the prize if she trades, so she should trade.
(a) Create a simulation in R to discover which answer is correct.
1.10. EXERCISES
92
(b) Show using formal arguments of conditional probability which answer
is correct.
Make sure your answers to (a) and (b) agree!
40. Prove Theorem 1.6 (pg. 54).
C HAPTER 2
M ODES
2.1
OF I NFERENCE
Data
This chapter takes up the heart of statistics: making inferences, quantitatively, from
data. The data, y1 , . . . , yn are assumed to be a random sample from a population.
In Chapter 1 we reasoned from f to Y . That is, we made statements like “If
the experiment is like . . . , then f will be . . . , and (y1 , . . . , yn ) will look like . . . ” or
“E(Y ) must be . . . ”, etc. In Chapter 2 we reason from Y to f . That is, we make
statements such
as “Since (y1 , . . . , yn ) turned out to be . . . it seems that f is likely to
R
be . . . ”, or “ yf (y) dy is likely to be around . . . ”, etc. This is a basis for knowledge:
learning about the world by observing it. Its importance cannot be overstated. The
field of statistics illuminates the type of thinking that allows us to learn from data
and contains the tools for learning quantitatively.
Reasoning from Y to f works because samples are usually like the populations
from which they come. For example, if f has a mean around 6 then most reasonably large samples from f also have a mean around 6, and if our sample has a
mean around 6 then we infer that f likely has a mean around 6. If our sample has
an SD around 10 then we infer that f likely has an SD around 10, and so on. So
much is obvious. But can we be more precise? If our sample has a mean around
6, then can we infer that f likely has a mean somewhere between, say, 5.5 and
6.5, or can we only infer that f likely has a mean between 4 and 8, or even worse,
between about -100 and 100? When can we say anything quantitative at all about
the mean of f ? The answer is not obvious, and that’s where statistics comes in.
Statistics provides the quantitative tools for answering such questions.
This chapter presents several generic modes of statistical analysis.
Data Description Data description can be visual, through graphs, charts, etc., or
numerical, through calculating sample means, SD’s, etc. Displaying a few
93
2.2. DATA DESCRIPTION
94
simple features of the data y1 , . . . , yn can allow us to visualize those same
features of f . Data description requires few a priori assumptions about f .
Likelihood In likelihood inference we assume that f is a member of a parametric
family of distributions {fθ : θ ∈ Θ}. Then inference about f is the same
as inference about the parameter θ, and different values of θ are compared
according to how well fθ explains the data.
Estimation The goal of estimation is to estimate various aspects of f , such as
its mean, median, SD, etc. Along with the estimate, statisticians try to give
quantitative measures of how accurate the estimates are.
Bayesian Inference Bayesian inference is a way to account not just for the data
y1 , . . . , yn , but also for other information we may have about f .
Prediction Sometimes the goal of statistical analysis is not to learn about f per se,
but to make predictions about y’s that we will see in the future. In addition
to the usual problem of not knowing f , we have the additional problem that
even if we knew f , we still wouldn’t be able to predict future y’s exactly.
Hypothesis Testing Sometimes we want to test hypotheses like Head Start is good
for kids or lower taxes are good for the economy or the new treatment is better
than the old.
Decision Making Often, decisions have to be made on the basis of what we have
learned about f . In addition, making good decisions requires accounting for
the potential gains and losses of each decision.
2.2
Data Description
There are many ways, both graphical and numerical, to describe data sets. Sometimes we’re interested in means, sometimes variations, sometimes trends through
time, and there are good ways to describe and display all these aspects and many
more. Simple data description is often enough to shed light on an underlying scientific problem. The subsections of Section 2.2 show some basic ways to describe
various types of data.
2.2. DATA DESCRIPTION
2.2.1
95
Summary Statistics
One of the simplest ways to describe a data set is by a low dimensional summary.
For instance, in Example 1.5 on ocean temperatures there were multiple measurements of temperatures from each of 9 locations. The measurements
from each
P
−1
location were summarized by the sample mean ȳ = n
yi ; comparisons of the
9 sample means helped oceanographers deduce the presence of the Mediterranean
tongue. Similarly, the essential features of many data sets can be captured in a
one-dimensional or low-dimensional summary. Such a summary is called a statistic. The examples below refer to a data set y1 , . . . , yn of size n.
Definition 2.1 (Statistic). A statistic is any function, possibly vector valued, of the
data.
The most important statistics are measures of location and dispersion. Important examples of location statistics include
P
mean The mean of the data is ȳ ≡ n−1 yi . R can compute means:
y <- 1:10
mean(y)
median A median of the data is any number m such that at least half of the yi ’s are
less than or equal to m and at least half of the yi ’s are greater than or equal
to m. We say “a” median instead of “the” median because a data set with an
even number of observations has an interval of medians. For example, if y
<- 1:10, then every m ∈ [5, 6] is a median. When R computes a median it
computes a single number by taking the midpoint of the interval of medians.
So median(y) yields 5.5.
quantiles For any p ∈ [0, 1], the p-th quantile of the data should be, roughly speaking, the number q such that pn of the data points are less than q and (1 − p)n
of the data points are greater than q.
Figure 2.1 illustrates the idea. Panel a shows a sample of 100 points plotted
as a stripchart (page 108). The black circles on the abcissa are the .05, .5,
and .9 quantiles; so 5 points (open circles) are to the left of the first vertical
line, 50 points are on either side of the middle vertical line, and 10 points are
to the right of the third vertical line. Panel b shows the empirical cdf of the
sample. The values .05, .5, and .9 are shown as squares on the vertical axis;
2.2. DATA DESCRIPTION
96
the quantiles are found by following the horizontal lines from the vertical
axis to the cdf, then the vertical lines from the cdf to the horizontal axis.
Panels c and d are similar, but show the distribution from which the sample
was drawn instead of showing the sample itself. In panel c, 5% of the mass
is to the left of the first black circle; 50% is on either side of the middle black
circle; and 10% is to the right of the third black dot. In panel d, the open
squares are at .05, .5, and .9 on the vertical axis; the quantiles are the circles
on the horizontal axis.
Denote the p-th quantile as qp (y1 , . . . , yn ), or simply as qp if the data set is
clear from the context. With only a finite sized sample qp (y1 , . . . , yn ) cannot
be found exactly. So the algorithm for finding quantiles works as follows.
1. Sort the yi ’s in ascending order. Label them y(1) , . . . , y(n) so that
y(1) ≤ · · · ≤ y(n) .
2. Set q0 ≡ y(1) and q1 ≡ y(n) .
3. y(2) through y(n−1) determine n − 1 subintervals in [y(1) , y(n) ]. So, for
i = 1, . . . , n − 2, set q i ≡ y(i+1) .
n−1
4. For p ∈
i
i+1
( n−1
, n−1
)
let qp be any number in the interval (q
i
n−1
, q i+1 ).
n−1
If p is a “nice” number then qp is often given a special name. For example, q.5
is the median; (q.25 , q.5 , q.75 ), the first, second and third quartiles, is a vectorvalued statistic of dimension 3; q.1 , q.2 , . . . are the deciles; q.78 is the 78’th
percentile.
i+1
i
, n−1
) R does linear interR can compute quantiles. When faced with p ∈ ( n−1
polation. E.g. quantile(y,c(.25,.75)) yields (3.25, 7.75).
The vector (y(1) , . . . , y(n) ) defined in step 1 of the algorithm for quantiles is an
n-dimensional statistic called the order statistic. y(i) by itself is called the i’th
order statistic.
Figure 2.1 was created with the following R code.
par ( mfrow=c(2,2) )
quant <- c ( .05, .5, .9 )
nquant <- length(quant)
2.2. DATA DESCRIPTION
97
b
0.4
0.0
F(y)
0.8
a
4
6
8
0
2
4
y
y
c
d
6
8
6
8
0.0
0.4
F(y)
0.15
0.8
2
0.00
p(y)
0
0
2
4
6
y
8
0
2
4
y
Figure 2.1: Quantiles. The black circles are the .05, .5, and .9 quantiles. The open
squares are the numbers .05, .5, and .9 on the vertical axis. Panels a and b are for
a sample; panels c and d are for a distribution.
2.2. DATA DESCRIPTION
98
y <- rgamma ( 100, 3 )
stripchart( y, method="jitter", pch=1, xlim=c(0,10),
xlab="y", main="a")
abline ( v=quantile(y,quant) )
points ( x=quantile(y,quant), y=rep(.5,nquant), pch=19 )
plot.ecdf(y, xlab="y", ylab="F(y)", xlim=c(0,10),
main="b" )
for ( q in quant )
segments ( c(0,quantile(y,q)), c(q,0),
rep(quantile(y,q),2), rep(q,2) )
points ( x=quantile(y,quant), y=rep(0,nquant), pch=19 )
points ( x=rep(0,nquant), y=quant, pch=22 )
y <- seq(0,10,length=100)
plot ( y, dgamma(y,3), type="l", xlim=c(0,10), ylab="p(y)",
main="c" )
points ( x=qgamma(quant,3), y=rep(0,nquant), pch=19 )
plot ( y, pgamma(y,3), type="l", ylab="F(y)", main="d" )
for ( q in quant )
segments ( c(0,qgamma(q,3)), c(q,0), rep(qgamma(q,3),2),
rep(q,2) )
points ( x=qgamma(quant,3), y=rep(0,nquant), pch=19 )
points ( x=rep(0,nquant), y=quant, pch=22 )
• plot.ecdf plots the empirical cumulative distribution function. Here the
word “empirical” means that the cdf comes from a sample, as opposed to
theoretical probability calculations.
Dispersion statistics measure how spread out the data are. Since there are many
ways to measure dispersion there are many dispersion statistics. Important dispersion statistics include
standard deviation The sample standard deviation or SD of a data set is
rP
(yi − ȳ)2
s≡
n
2.2. DATA DESCRIPTION
99
Note: some statisticians prefer
rP
s≡
(yi − ȳ)2
n−1
for reasons which do not concern us here. If n is large there is little difference
between the two versions of s.
variance The sample variance is
P
(yi − ȳ)2
s ≡
n
2
Note: some statisticians prefer
P
(yi − ȳ)2
s ≡
n−1
2
for reasons which do not concern us here. If n is large there is little difference
between the two versions of s2 .
interquartile range The interquartile range is q.75 − q.25
Presenting a low dimensional statistic is useful if we believe that the statistic is
representative of the whole population. For instance, in Example 1.5, oceanographers believe the data they have collected is representative of the long term state
of the ocean. Therefore the sample means at the nine locations in Figure 1.12 are
representative of the long term state of the ocean at those locations. More formally,
for each location we can imagine a population of temperatures, one temperature
for each moment in time. That population has an unknown pdf f . Even though are
data are not really a random sample from f (The sampling times were not chosen
randomly, among other problems.) we can think of them that way without making
too serious an error. The histograms in Figure 1.12 are estimates of the f ’s for the
nine locations. The mean of each f is what oceanographers call a climatological
mean, or an average which, because it is taken over a long period of time, represents the climate. The nine sample means are estimates of the nine climatological
mean temperatures at those nine locations. Simply presenting the sample means
reveals some interesting structure in the data, and hence an interesting facet of
physical oceanography.
Often, more than a simple data description or display is necessary; the statistician has to do a bit of exploring the data set. This activity is called exploratory data
2.2. DATA DESCRIPTION
100
analysis or simply eda. It is hard to give general rules for eda, although displaying
the data in many different ways is often a good idea. The statistician must decide
what displays and eda are appropriate for each data set and each question that
might be answered by the data set. That is one thing that makes statistics interesting. It cannot be reduced to a set of rules and procedures. A good statistician
must be attuned to the potentially unique aspects of each analysis. We now present
several examples to show just a few of the possible ways to explore data sets by
displaying them graphically. The examples reveal some of the power of graphical
display in illuminating data and teasing out what it has to say.
2.2.2
Displaying Distributions
Instead of reducing a data set to just a few summary statistics, it is often helpful to
display the full data set. But reading a long list of numbers is usually not helpful;
humans are not good at assimilating data in that form. We can learn a lot more
from a graphical representation of the data.
Histograms The next examples use histograms to display the full distribution of
some data sets. Visual comparison of the histograms reveals structure in the data.
Example 2.1 (Tooth Growth)
The R statistical language comes with many data sets. Type data() to see what they
are. This example uses the data set ToothGrowth on the effect of vitamin C on tooth
growth in guinea pigs. You can get a description by typing help(ToothGrowth). You
can load the data set into your R session by typing data(ToothGrowth). ToothGrowth
is a dataframe of three columns. The first few rows look like this:
len supp dose
1 4.2
VC 0.5
2 11.5
VC 0.5
3 7.3
VC 0.5
Column 1, or len, records the amount of tooth growth. Column 2, supp, records whether
the guinea pig was given vitamin C in ascorbic acid or orange juice. Column 3, dose,
records the dose, either 0.5, 1.0 or 2.0 mg. Thus there are six groups of guinea pigs in
a two by three layout. Each group has ten guinea pigs, for a total of sixty observations.
Figure 2.2 shows histograms of growth for each of the six groups. From Figure 2.2 it is
clear that dose affects tooth growth.
2.2. DATA DESCRIPTION
101
OJ, 0.5
0
0.0
1
1.0
2
3
2.0
4
5
3.0
VC, 0.5
0
5 10
20
30
0
5 10
30
OJ, 1
0
1
2
3
4
0.0 0.5 1.0 1.5 2.0
VC, 1
20
0
5 10
20
30
0
5 10
30
OJ, 2
0.0
1.0
2.0
0.0 0.5 1.0 1.5 2.0
3.0
VC, 2
20
0
5 10
20
30
0
5 10
20
30
Figure 2.2: Histograms of tooth growth by delivery method (VC or OJ) and dose
(0.5, 1.0 or 2.0).
2.2. DATA DESCRIPTION
102
VC, 2
2.0
VC, 1
1.0
0.0
0
0.0
0.5
1
0.5
1.0
2
1.5
2.0
3
1.5
2.5
4
3.0
VC, 0.5
0 10
25
0 10
25
3.0
OJ, 2
0 10
25
0.0
0
0.0
0.5
1
0.5
1.0
2
1.5
1.0
3
2.0
1.5
4
2.5
5
0 10
OJ, 1
2.0
OJ, 0.5
25
0 10
25
0 10
25
Figure 2.3: Histograms of tooth growth by delivery method (VC or OJ) and dose
(0.5, 1.0 or 2.0).
2.2. DATA DESCRIPTION
103
VC, 2
2.0
VC, 1
1.0
0.0
0
0.0
1
2
1.5
3
4
3.0
VC, 0.5
25
0 10
0 10
OJ, 1
25
OJ, 2
0 10
25
1.5
0.0
0
0.0
2
1.0
4
2.0
OJ, 0.5
25
3.0
0 10
0 10
25
0 10
25
Figure 2.4: Histograms of tooth growth by delivery method (VC or OJ) and dose
(0.5, 1.0 or 2.0).
2.2. DATA DESCRIPTION
104
Figure 2.2 was produced by the following R code.
supp <- unique ( ToothGrowth$supp )
dose <- unique ( ToothGrowth$dose )
par ( mfcol=c(3,2) )
for ( i in 1:2 )
for ( j in 1:3 ) {
good <- (
ToothGrowth$supp == supp[i]
& ToothGrowth$dose == dose[j] )
hist ( ToothGrowth$len[good], breaks=seq(0,34,by=2),
xlab="", ylab="",
main=paste(supp[i], ", ", dose[j], sep="") )
}
• unique(x) returns the unique values in x. For example, if x <- c(1,1,2) then
unique(x) would be 1 2.
Figure 2.3 is similar to Figure 2.2 but laid out in the other direction. (Notice that it’s
easier to compare histograms when they are arranged vertically rather than horizontally.)
The figures suggest that delivery method does have an effect, but not as strong as
the dose effect. Notice also that Figure 2.3 is more difficult to read than Figure 2.2
because the histograms are too tall and narrow. Figure 2.4 repeats Figure 2.3 but using
less vertical distance; it is therefore easier to read. Part of good statistical practice is
displaying figures in a way that makes them easiest to read and interpret.
The figures alone have suggested that dose is the most important effect, and delivery
method less so. A further analysis could try to be more quantitative: what is the typical
size of each effect, how sure can we be of the typical size, and how much does the effect
vary from animal to animal. The figures already suggest answers, but a more formal
analysis is deferred to Section 2.7.
Figures 1.12, 2.2, and 2.3 are histograms. The abscissa has the same scale as
the data. The data are divided into bins. The ordinate shows the number of data
points in each bin. (hist(...,prob=T) plots the ordinate as probability rather
than counts.) Histograms are a powerful way to display data because they give a
strong visual impression of the main features of a data set. However, details of the
histogram can depend on both the number of bins and on the cut points between
bins. For that reason it is sometimes better to use a display that does not depend
2.2. DATA DESCRIPTION
105
on those features, or at least not so strongly. Example 2.2 illustrates.
Density Estimation
Example 2.2 (Hot Dogs)
In June of 1986, Consumer Reports published a study of hot dogs. The data are available
at DASL, the Data and Story Library, a collection of data sets for free use by statistics
students. DASL says the data are
“Results of a laboratory analysis of calories and sodium content of major hot
dog brands. Researchers for Consumer Reports analyzed three types of hot
dog: beef, poultry, and meat (mostly pork and beef, but up to 15% poultry
meat).”
You can download the data from http://lib.stat.cmu.edu/DASL/Datafiles/Hotdogs.
html. The first few lines look like this:
Type
Beef
Beef
Calories
186
181
Sodium
495
477
This example looks at the calorie content of beef hot dogs. (Later examples will compare
the calorie contents of different types of hot dogs.)
Figure 2.5(a) is a histogram of the calorie contents of beef hot dogs in the study.
From the histogram one might form the impression that there are two major varieties of
beef hot dogs, one with about 130–160 calories or so, another with about 180 calories or
so, and a rare outlier with fewer calories. Figure 2.5(b) is another histogram of the same
data but with a different bin width. It gives a different impression, that calorie content
is evenly distributed, approximately, from about 130 to about 190 with a small number
of lower calorie hot dogs. Figure 2.5(c) gives much the same impression as 2.5(b). It
was made with the same bin width as 2.5(a), but with cut points starting at 105 instead
of 110. These histograms illustrate that one’s impression can be influenced by both bin
width and cut points.
Density estimation is a method of reducing dependence on cut points. Let x1 , . . . ,
x20 be the calorie contents of beef hot dogs in the study. We think of x1 , . . . , x20 as a
random sample from a density f representing the population of all beef hot dogs. Our
goal is to estimate f . For any fixed number x, how shall we estimate f (x)? The idea is
to use information local to x to estimate f (x). We first describe a basic version, then
add two refinements to get kernel density estimation and the density() function in R.
2.2. DATA DESCRIPTION
106
Let n be the sample size (20 for the hot dog data). Begin by choosing a number
h > 0. For any number x the estimate fˆbasic (x) is defined to be
n
1 X
fraction of sample points within h of x
fˆbasic (x) ≡
1(x−h,x+h) (xi ) =
2nh i=1
2h
fˆbasic has at least two apparently undesirable features.
1. fˆbasic (x) gives equal weight to all data points in the interval (x − h, x + h) and
has abrupt cutoffs at the ends of the interval. It would be better to give the most
weight to data points closest to x and have the weights decrease gradually for
points increasingly further away from x.
2. fˆbasic (x) depends critically on the choice of h.
We deal with these problems by introducing a weight function that depends on distance
from x. Let g0 be a probability density function. Usually g0 is chosen to be symmetric
and unimodal, centered at 0. Define
1X
fˆ(x) ≡
g0 (x − xi )
n
Choosing g0 to be a probability density ensures that fˆ is also a probability density because
Z ∞
XZ ∞
1
fˆ(x) dx =
g0 (x − xi ) dx = 1
(2.1)
n i −∞
−∞
When g0 is chosen to be a continuous function it deals nicely with problem 1 above. In
fact, fˆbasic comes from taking g0 to be the uniform density on (−h, h).
To deal with problem 2 we rescale g0 . Choose a number h > 0 and define a new
density g(x) = h−1 g0 (x/h). A little thought shows that g differs
R from g0 by a rescaling
−1
of the horizontal axis; the factor h compensates to make g = 1. Now define the
density estimate to be
1 X
1X
g(x − xi ) =
g0 ((x − xi )/h)
fˆh (x) ≡
n
nh
h is called the bandwidth. Of course fˆh still depends on h. It turns out that dependence
on bandwidth is not really a problem. It is useful to view density estimates for several
different bandwidths. Each reveals features of f at different scales. Figures 2.5(d), (e),
and (f) are examples. Panel (d) was produced by the default bandwidth; panels (e)
and (f) were produced with 1/4 and 1/2 the default bandwidth. Larger bandwidth
makes a smoother estimate of f ; smaller bandwidth makes it rougher. None is exactly
right. It is useful to look at several.
2.2. DATA DESCRIPTION
107
(b)
0
0
1
2
2
4
3
6
4
5
8
(a)
140
160
180
120
140
160
calories
calories
(c)
(d)
180
0
0.010
0.000
1
2
3
density
4
5
120
120 140 160 180
100
calories
(e)
(f)
200
0.000
0.010
0.015
density
0.020
0.030
calories
0.000
density
150
100
140
calories
180
100
140
180
calories
Figure 2.5: (a), (b), (c): histograms of calorie contents of beef hot dogs; (d), (e),
(f): density estimates of calorie contents of beef hot dogs.
2.2. DATA DESCRIPTION
108
Figure 2.5 was produced with
hotdogs <- read.table ( "data/hotdogs/data", header=T )
cal.beef <- hotdogs$Calories [ hotdogs$Type == "Beef" ]
par ( mfrow=c(3,2) )
hist ( cal.beef, main="(a)", xlab="calories", ylab="" )
hist ( cal.beef, breaks=seq(110,190,by=20), main="(b)",
xlab="calories", ylab="" )
hist ( cal.beef, breaks=seq(105,195,by=10), main="(c)",
xlab="calories", ylab="" )
plot ( density ( cal.beef ), main="(d)", xlab="calories",
ylab="density" )
plot ( density ( cal.beef, adjust=1/4 ), main="(e)",
xlab="calories", ylab="density" )
plot ( density ( cal.beef, adjust=1/2 ), main="(f)",
xlab="calories", ylab="density" )
• In panel (a) R used its default method for choosing histogram bins.
• In panels (b) and (c) the histogram bins were set by
hist ( ..., breaks=seq(...) ).
• density() produces a kernel density estimate.
• R uses a Gaussian kernel by default which means that g0 above is the N(0, 1)
density.
• In panel (d) R used its default method for choosing bandwidth.
• In panels (e) and (f) the bandwidth was set to 1/4 and 1/2 the default by
density(..., adjust=...).
Stripcharts and Dotplots Figure 2.6 uses the ToothGrowth data to illustrate
stripcharts, also called dotplots, an alternative to histograms. Panel (a) has three
rows of points corresponding to the three doses of ascorbic acid. Each point is for
one animal. The abscissa shows the amount of tooth growth; the ordinate shows
2.2. DATA DESCRIPTION
109
the dose. The panel is slightly misleading because points with identical coordinates
are plotted directly on top of each other. In such situations statisticians often add
a small amount of jitter to the data, to avoid overplotting. The middle panel is a
repeat of the top, but with jitter added. The bottom panel shows tooth growth by
delivery method. Compare Figure 2.6 to Figures 2.2 and 2.3. Which is a better
display for this particular data set?
Figure 2.6 was produced with the following R code.
par ( mfrow=c(3,1) )
stripchart ( ToothGrowth$len ~ ToothGrowth$dose, pch=1,
main="(a)", xlab="growth", ylab="dose" )
stripchart ( ToothGrowth$len ~ ToothGrowth$dose,
method="jitter", main="(b)", xlab="growth",
ylab="dose", pch=1 )
stripchart ( ToothGrowth$len ~ ToothGrowth$supp,
method="jitter", main="(c)", xlab="growth",
ylab="method", pch=1 )
Boxplots An alternative, useful for comparing many distributions simultaneously,
is the boxplot. Example 2.3 uses boxplots to compare scores on 24 quizzes in a
statistics course.
Example 2.3 (Quiz Scores)
In the spring semester of 2003, 58 students completed Statistics 103 at Duke University.
Figure 2.7 displays their grades.
There were 24 quizzes during the semester. Each was worth 10 points. The upper
panel of the figure shows the distribution of scores on each quiz. The abscissa is labelled
1 through 24, indicating the quiz number. For each quiz, the figure shows a boxplot. For
each quiz there is a box. The horizontal line through the center of the box is the median
grade for that quiz. We can see that the median score on Quiz 2 is around 7, while the
median score on Quiz 3 is around 4. The upper end of the box is the 75th percentile (3rd
quartile) of scores; the lower end of the box is the 25th percentile (1st quartile). We can
see that about half the students scored between about 5 and 8 on Quiz 2, while about
half the students scored between about 2 and 6 on Quiz 3. Quiz 3 was tough.
Each box may have whiskers, or dashed lines which extend above and below the box.
The exact definition of the whiskers is not important, but they are meant to include most
2.2. DATA DESCRIPTION
110
1
0.5
dose
2
(a)
5
10
15
20
25
30
35
25
30
35
25
30
35
growth
1
0.5
dose
2
(b)
5
10
15
20
growth
OJ
method
VC
(c)
5
10
15
20
growth
Figure 2.6: (a) Tooth growth by dose, no jittering; (b) Tooth growth by dose with
jittering; (c) Tooth growth by delivery method with jittering
2.2. DATA DESCRIPTION
111
of the data points that don’t fall inside the box. (In R, by default, the whiskers extend to
the most extreme data point which is no more that 1.5 times the interquartile range away
from the median.) Finally, there may be some individual points plotted above or below
each boxplot. These indicate outliers, or scores that are extremely high or low relative to
other scores on that quiz. Many quizzes had low outliers; only Quiz 5 had a high outlier.
Box plots are extremely useful for comparing many sets of data. We can easily see,
for example, that Quiz 5 was the most difficult (75% of the class scored 3 or less.) while
Quiz 1 was the easiest (over 75% of the class scored 10.)
There were no exams or graded homeworks. Students’ grades were determined by
their best 20 quizzes. To compute grades, each student’s scores were sorted, the first 4
were dropped, then the others were averaged. Those averages are displayed in a stripchart
in the bottom panel of the figure. It’s easy to see that most of the class had quiz averages
between about 5 and 9 but that 4 averages were much lower.
Figure 2.7 was produced by the following R code.
... # read in the data
colnames(scores) <- paste("Q",1:24,sep="")
# define column names
boxplot ( data.frame(scores), main="Individual quizzes" )
scores[is.na(scores)] <- 0 # replace missing scores
# with 0’s
temp <- apply ( scores, 1, sort ) # sort
temp <- temp[5:24,]
# drop the 4 lowest
scores.ave <- apply ( temp, 2, mean ) # find the average
stripchart ( scores.ave, "jitter", pch=1, xlab="score",
xlim=c(0,10), main="Student averages" )
QQ plots Sometimes we want to assess whether a data set is well modelled by a
Normal distribution and, if not, how it differs from Normal. One obvious way to
assess Normality is by looking at histograms or density estimates. But the answer
is often not obvious from the figure. A better way to assess Normality is with
QQ plots. Figure 2.8 illustrates for the nine histograms of ocean temperatures in
Figure 1.12.
2.2. DATA DESCRIPTION
112
0
2
4
6
8
10
Individual quizzes
Q1 Q4 Q7
Q11
Q15
Q19
Q23
Student averages
0
2
4
6
8
score
Figure 2.7: Quiz scores from Statistics 103
10
2.2. DATA DESCRIPTION
113
Each panel in Figure 2.8 was created with the ocean temperatures near a particular (latitude, longitude) combination. Consider, for example, the upper left
panel which was constructed from the n = 213 points x1 , . . . , x213 taken near (45,
-40). Those points are sorted, from smallest to largest, to create the order statistic (x(1) , . . . , x(213) ). Then they are plotted against E[(z(1) , . . . , z(213) )], the expected
order statistic from a Normal distribution. If the xi s are approximately Normal
then the QQ plot will look approximately linear. The slope of the line indicates the
standard deviation.
In Figure 2.8 most of the panels do look approximately linear, indicating that a
Normal model is reasonable. But some of the panels show departures from Normality. In the upper left and lower left panels, for example, the plots looks roughly linear except for the upper right corners which show some data points much warmer
than expected if they followed a Normal distribution. In contrast, the coolest temperatures in the lower middle panel are not quite as cool as expected from a Normal
distribution.
Figure 2.8 was produced with
lats <- c ( 45, 35, 25 )
lons <- c ( -40, -30, -20 )
par ( mfrow=c(3,3) )
for ( i in 1:3 )
for ( j in 1:3 ) {
good <- abs ( med.1000$lon - lons[j] ) < 1 &
abs ( med.1000$lat - lats[i] ) < 1
qqnorm ( med.1000$temp[good], xlab="", ylab="",
sub=paste("n = ", sum(good), sep=""),
main = paste ( "latitude =", lats[i], "\n longitude =",
lons[j] ))
}
2.2.3
Exploring Relationships
Sometimes it is the relationships between several random variables that are of
interest. For example, in discrimination cases the focus is on the relationship between race or gender on one hand and employment or salary on the other hand.
Subsection 2.2.3 shows several graphical ways to display relationships.
2.2. DATA DESCRIPTION
114
latitude = 45
longitude = !30
latitude = 45
longitude = !20
4
9
7
4.5
6
5
6
5.5
8
7
8
6.5
9
10
latitude = 45
longitude = !40
!3 !1
1
3
!2
0
2
!2
0
2
n = 105
n = 112
latitude = 35
longitude = !40
latitude = 35
longitude = !30
latitude = 35
longitude = !20
5.5
8.5
8.0
6.5
8.5
9.5
9.0
7.5
9.5
10.5
n = 213
!2
0
2
!2
0 1 2
!2
0
2
n = 24
n = 44
latitude = 25
longitude = !40
latitude = 25
longitude = !30
latitude = 25
longitude = !20
7.2
6.8
6.5
6.5
7.0
7.5
7.5
8.5
8.0
7.6
n = 37
!2
0
n = 47
2
!2
0
n = 35
2
!2
0
2
n = 27
Figure 2.8: QQ plots of water temperatures (◦ C) at 1000m depth
2.2. DATA DESCRIPTION
115
We begin with Example 2.4, an analysis of potential discrimination in admission
to UC Berkeley graduate school.
Example 2.4
In 1973 UC Berkeley investigated its graduate admissions rates for potential sex bias. Apparently women were more likely to be rejected than men. The data set UCBAdmissions
gives the acceptance and rejection data from the six largest graduate departments on
which the study was based. Typing help(UCBAdmissions) tells more about the data.
It tells us, among other things:
...
Format:
A 3-dimensional array resulting from cross-tabulating 4526
observations on 3 variables. The variables and their levels
are as follows:
No
1
2
3
Name
Admit
Gender
Dept
Levels
Admitted, Rejected
Male, Female
A, B, C, D, E, F
...
The major question at issue is whether there is sex bias in admissions. To investigate we
ask whether men and women are admitted at roughly equal rates.
Typing UCBAdmissions gives the following numerical summary of the data.
, , Dept = A
Gender
Admit
Male Female
Admitted 512
89
Rejected 313
19
, , Dept = B
Gender
Admit
Male Female
Admitted 353
17
Rejected 207
8
2.2. DATA DESCRIPTION
116
, , Dept = C
Gender
Admit
Male Female
Admitted 120
202
Rejected 205
391
, , Dept = D
Gender
Admit
Male Female
Admitted 138
131
Rejected 279
244
, , Dept = E
Gender
Admit
Male Female
Admitted
53
94
Rejected 138
299
, , Dept = F
Gender
Admit
Male Female
Admitted
22
24
Rejected 351
317
For each department, the twoway table of admission status versus sex is displayed.
Such a display, called a crosstabulation, simply tabulates the number of entries in each
cell of a multiway table. It’s hard to tell from the crosstabulation whether there is a
sex bias and, if so, whether it is systemic or confined to just a few departments. Let’s
continue by finding the marginal (aggregated by department as opposed to conditional
given deparment) admissions rates for men and women.
> apply(UCBAdmissions, c(1, 2), sum)
Gender
Admit
Male Female
2.2. DATA DESCRIPTION
Admitted 1198
Rejected 1493
117
557
1278
The admission rate for men is 1198/(1198 + 1493) = 44.5% while the admission rate for
women is 557/(557 + 1493) = 30.4%, much lower. A mosaic plot, created with
mosaicplot(apply(UCBAdmissions, c(1, 2), sum),
main = "Student admissions at UC Berkeley")
is a graphical way to display the discrepancy. (A beautiful example of a mosaic plot is on
the cover of CHANCE magazine. ref here.) The left column is for admitted students; the
heights of the rectangles show how many admitted students were male and how many
were female. The right column is for rejected students; the heights of the rectangles
show how many were male and female. If sex and admission status were independent,
i.e., if there were no sex bias, then the proportion of men among admitted students
would equal the proportion of men among rejected students and the heights of the left
rectangles would equal the heights of the right rectangles. The apparent difference in
heights is a visual representation of the discrepancy in sex ratios among admitted and
rejected students. The same data can be viewed as discrepant admission rates for men
and women by transposing the matrix:
mosaicplot(t(apply(UCBAdmissions, c(1, 2), sum)),
main = "Student admissions at UC Berkeley")
The existence of discrepant sex ratios for admitted and rejected students is equivalent
to the existence of discrepant admission rates for males and females and to dependence
of sex and admission rates. The lack of discrepant ratios is equivalent to independence
of sex and admission rates.
Evidently UC Berkeley admitted men and women at different rates. But graduate
admission decisions are not made by a central admissions office; they are made by the
individual departments to which students apply. So our next step is to look at admission
rates for each department separately. We can look at the crosstabulation on page 115 or
make mosaic plots for each department separately (not shown here) with
## Mosaic plots for individual departments
for(i in 1:6)
mosaicplot(UCBAdmissions[,,i],
xlab = "Admit", ylab = "Sex",
main = paste("Department", LETTERS[i]))
2.2. DATA DESCRIPTION
118
Student admissions at UC Berkeley
Rejected
Female
Gender
Male
Admitted
Admit
Figure 2.9: Mosaic plot of UCBAdmissions
2.2. DATA DESCRIPTION
119
Student admissions at UC Berkeley
Female
Rejected
Admit
Admitted
Male
Gender
Figure 2.10: Mosaic plot of UCBAdmissions
2.2. DATA DESCRIPTION
120
The plots show that in each department men and women are admitted at roughly
equal rates. The following snippet calculates and prints the rates. It confirms the rough
equality except for department A which admitted women at a higher rate than men.
for ( i in 1:6 ) {
temp <- UCBAdmissions[,,i]
m <- temp[1,1] / (temp[1,1]+temp[2,1])
w <- temp[1,2] / (temp[1,2]+temp[2,2])
print ( c ( m, w ) )
}
#
#
#
#
#
for each department
that department’s data
Men’s admission rate
Women’s admission rate
print them
Note that departments A and B which had high admission rates also had large numbers
of male applicants while departments C, D, E and F which had low admission rates had
large numbers of female applicants. The generally accepted explanation for the discrepant
marginal admission rates is that men tended to apply to departments that were easy to
get into while women tended to apply to departments that were harder to get into. A
more sinister explanation is that the university gave more resources to departments with
many male applicants, allowing them to admit a greater proportion of their applicants.
The data we’ve analyzed are consistent with both explanations; the choice between them
must be made on other grounds.
One lesson here for statisticians is the power of simple data displays and summaries.
Another is the need to consider the unique aspects of each data set. The explanation
of different admissions rates for men and women could only be discovered by someone
familiar with how universities and graduate schools work, not by following some general
rules about how to do statistical analyses.
The next example is about the duration of eruptions and interval to the next
eruption of the Old Faithful geyser. It explores two kinds of relationships — the relationship between duration and eruption and also the relationship of each variable
with time.
Example 2.5 (Old Faithful)
Old Faithful is a geyser in Yellowstone National Park and a great tourist attraction. As
Denby and Pregibon [1987] explain, “From August 1 to August 8, 1978, rangers and
naturalists at Yellowstone National Park recorded the duration of eruption and interval
to the next eruption (both in minutes) for eruptions of Old Faithful between 6 a.m.
and midnight. The intent of the study was to predict the time of the next eruption,
to be posted at the Visitor’s Center so that visitors to Yellowstone can usefully budget
their time.” The R dataset faithful contains the data. In addition to the references
listed there, the data and analyses can also be found in Weisberg [1985] and Denby and
2.2. DATA DESCRIPTION
121
Pregibon [1987]. The latter analysis emphasizes graphics, and we shall follow some of
their suggestions here.
We begin exploring the data with stripcharts and density estimates of durations and
intervals. These are shown in Figure 2.11. The figure suggests bimodal distributions. For
duration there seems to be one bunch of data around two minutes and another around
four or five minutes. For interval, the modes are around 50 minutes and 80 minutes. A
plot of interval versus duration, Figure 2.12, suggests that the bimodality is present in the
joint distribution of the two variables. Because the data were collected over time, it might
be useful to plot the data in the order of collection. That’s Figure 2.13. The horizontal
scale in Figure 2.13 is so compressed that it’s hard to see what’s going on. Figure 2.14
repeats Figure 2.13 but divides the time interval into two subintervals to make the plots
easier to read. The subintervals overlap slightly. The persistent up-and-down character
of Figure 2.14 shows that, for the most part, long and short durations are interwoven,
as are long and short intervals. (Figure 2.14 is potentially misleading. The data were
collected over an eight day period. There are eight separate sequences of eruptions with
gaps in between. The faithful data set does not tell us where the gaps are. Denby and
Pregibon [1987] tell us where the gaps are and use the eight separate days to find errors
in data transcription.) Just this simple analysis, a collection of four figures, has given us
insight into the data that will be very useful in predicting the time of the next eruption.
Figures 2.11, 2.12, 2.13, and 2.14 were produced with the following R code.
data(faithful)
attach(faithful)
par ( mfcol=c(2,2) )
stripchart ( eruptions, method="jitter", pch=1, xlim=c(1,6),
xlab="duration (min)", main="(a)" )
plot ( density ( eruptions ), type="l", xlim=c(1,6),
xlab="duration (min)", main="(b)" )
stripchart ( waiting, method="jitter", pch=1, xlim=c(40,100),
xlab="waiting (min)", main="(c)" )
plot ( density ( waiting ), type="l", xlim=c(40,100),
xlab="waiting (min)", main="(d)" )
par ( mfrow=c(1,1) )
plot ( eruptions, waiting, xlab="duration of eruption",
ylab="time to next eruption" )
2.2. DATA DESCRIPTION
122
(a)
2
3
4
5
6
40
60
80
duration (min)
waiting (min)
(b)
(d)
100
0.01
0.02
Density
0.3
0.2
0.0
0.00
0.1
Density
0.4
0.03
0.5
1
(c)
1
2
3
4
5
duration (min)
6
40
60
80
100
waiting (min)
Figure 2.11: Old Faithful data: duration of eruptions and waiting time between
eruptions. Stripcharts: (a) and (c). Density estimates: (b) and (d).
123
70
50
60
time to next eruption
80
90
2.2. DATA DESCRIPTION
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
duration of eruption
Figure 2.12: Waiting time versus duration in the Old Faithful dataset
2.2. DATA DESCRIPTION
124
3.5
2.5
1.5
duration
4.5
a
0
50
100
150
200
250
200
250
data number
70
50
waiting time
90
b
0
50
100
150
data number
Figure 2.13: (a): duration and (b): waiting time plotted against data number in
the Old Faithful dataset
2.2. DATA DESCRIPTION
125
3.5
1.5
duration
a1
0
50
100
150
data number
4.0
2.0
duration
a2
0
20
40
60
80
100
120
140
data number
80
50
waiting time
b1
0
50
100
150
data number
80
50
waiting time
b2
0
20
40
60
80
100
120
140
data number
Figure 2.14: (a1), (a2): duration and (b1), (b2): waiting time plotted against data
number in the Old Faithful dataset
2.2. DATA DESCRIPTION
126
par ( mfrow=c(2,1) )
plot.ts ( eruptions, xlab="data number", ylab="duration",
main="a" )
plot.ts ( waiting, xlab="data number", ylab="waiting time",
main="b" )
par ( mfrow=c(4,1) )
plot.ts ( eruptions[1:150], xlab="data number",
ylab="duration", main="a1" )
plot.ts ( eruptions[130:272], xlab="data number",
ylab="duration", main="a2" )
plot.ts ( waiting[1:150], xlab="data number",
ylab="waiting time", main="b1")
plot.ts ( waiting[130:272], xlab="data number",
ylab="waiting time", main="b2")
Figures 2.15 and 2.16 introduce coplots, a tool for visualizing the relationship
among three variables. They represent the ocean temperature data from Example 1.5. In Figure 2.15 there are six panels in which temperature is plotted against
latitude. Each panel is made from the points in a restricted range of longitude. The
upper panel, the one spanning the top of the Figure, shows the six different ranges
of longitude. For example, the first longitude range runs from about -10 to about
-17. Points whose longitude is in the interval (−17, −10) go into the upper right
panel of scatterplots. These are the points very close to the mouth of the Mediterranean Sea. Looking at that panel we see that temperature increases very steeply
from South to North, until about 35◦ , at which point they start to decrease steeply
as we go further North. That’s because we’re crossing the Mediterranean tongue at
a point very close to its source.
The other longitude ranges are about (−20, −13), (−25, −16), (−30, −20), (−34, −25)
and (−40, −28). They are used to create the scatterplot panels in the upper center, upper left, lower right, lower center, and lower left, respectively. The general
impression is
• temperatures decrease slightly as we move East to West,
• the angle in the scatterplot becomes slightly shallower as we move East to
West, and
2.2. DATA DESCRIPTION
127
• there are some points that don’t fit the general pattern.
Notice that the longitude ranges are overlapping and not of equal width. The
ranges are chosen by R to have a little bit of overlap and to put roughly equal
numbers of points into each range.
Figure 2.16 reverses the roles of latitude and longitude. The impression is that
temperature increases gradually from West to East. These two figures give a fairly
clear picture of the Mediterranean tongue.
Figures 2.15 and 2.16 were produced by
coplot ( temp ~ lat | lon )
coplot ( temp ~ lon | lat )
Example 2.6 shows one way to display the relationship between two sequences
of events.
Example 2.6 (Neurobiology)
To learn how the brain works, neurobiologists implant electrodes into animal brains. These
electrodes are fine enough to record the firing times of individual neurons. A sequence
of firing times of a neuron is called a spike train. Figure 2.17 shows the spike train from
one neuron in the gustatory cortex of a rat while the rat was in an experiment on taste.
This particular rat was in the experiment for a little over 80 minutes. Those minutes are
marked on the y-axis. The x-axis is marked in seconds. Each circle on the plot shows a
time at which the neuron fired. We can see, for example, that this neuron fired about
nine times in the first five seconds, then was silent for about the next ten seconds. We
can also see, for example, that this neuron undergoes some episodes of very rapid firing
lasting up to about 10 seconds.
Since this neuron is in the gustatory cortex — the part of the brain responsible for
taste — it is of interest to see how the neuron responds to various tastes. During the
experiment the rat was licking a tube that sometimes delivered a drop of water and
sometimes delivered a drop of water in which a chemical, or tastant, was dissolved. The
55 short vertical lines on the plot show the times at which the rat received a drop of 300
millimolar (.3 M) solution of NaCl. We can examine the plot for relationships between
deliveries of NaCl and activity of the neuron.
2.2. DATA DESCRIPTION
128
Given : lon
!40
30
40
!30
!25
!20
50
20
!15
30
!10
40
50
5
10
15
temp
5
10
15
20
!35
20
30
40
50
lat
Figure 2.15: Temperature versus latitude for different values of longitude
2.2. DATA DESCRIPTION
129
Given : lat
20
!30
!20
30
35
40
!10
!40
45
!30
50
!20
!10
5
10
15
temp
5
10
15
!40
25
!40
!30
!20
!10
lon
Figure 2.16: Temperature versus longitude for different values of latitude
2.2. DATA DESCRIPTION
130
13 18 24 29 34 39 44 50 55 60 65 70 76 81
|
| | ||
|||||
|| | | |
| |||
| ||||
||
||||
||| ||
| | || |
8
minutes
a spike train
4
|||||
| | || |
0
| | | ||
0
10
20
30
40
50
60
seconds
Figure 2.17: Spike train from a neuron during a taste experiment. The dots show
the times at which the neuron fired. The solid lines show times at which the rat
received a drop of a .3 M solution of NaCl.
2.2. DATA DESCRIPTION
131
Figure 2.17 was produced by
datadir <- "~/research/neuro/data/stapleton/"
spikes <- list (
sig002a = scan ( paste ( datadir, "sig002a.txt", sep="" ) ),
sig002b = scan ( paste ( datadir, "sig002b.txt", sep="" ) ),
sig002c = scan ( paste ( datadir, "sig002c.txt", sep="" ) ),
sig003a = scan ( paste ( datadir, "sig003a.txt", sep="" ) ),
sig003b = scan ( paste ( datadir, "sig003b.txt", sep="" ) ),
sig004a = scan ( paste ( datadir, "sig004a.txt", sep="" ) ),
sig008a = scan ( paste ( datadir, "sig008a.txt", sep="" ) ),
sig014a = scan ( paste ( datadir, "sig014a.txt", sep="" ) ),
sig014b = scan ( paste ( datadir, "sig014b.txt", sep="" ) ),
sig017a = scan ( paste ( datadir, "sig017a.txt", sep="" ) )
)
tastants <- list (
MSG100 = scan ( paste ( datadir, "MSG100.txt", sep="" ) ),
MSG300 = scan ( paste ( datadir, "MSG300.txt", sep="" ) ),
NaCl100 = scan ( paste ( datadir, "NaCl100.txt", sep="" ) ),
NaCl300 = scan ( paste ( datadir, "NaCl300.txt", sep="" ) ),
water
= scan ( paste ( datadir, "water.txt",
sep="" ) )
)
stripchart ( spikes[[8]] %% 60 ~ spikes[[8]] %/% 60, pch=".",
main="a spike train", xlab="seconds", ylab="minutes" )
points ( tastants$NaCl300 %% 60, tastants$NaCl300 %/% 60 + 1,
pch="|" )
• The line datadir <- ... stores the name of the directory in which I keep
the neuro data. When used in paste it identifies individual files.
• The command list() creates a list. The elements of a list can be anything. In
this case the list named spikes has ten elements whose names are sig002a,
sig002b, . . . , and sig017a. The list named tastants has five elements whose
names are MSG100, MSG300, NaCl100, NaCl300, and water. Lists are useful for
keeping related objects together, esepecially when those objects aren’t all of
the same type.
• Each element of the list is the result of a scan(). scan() reads a file and
stores the result in a vector. So spikes is a list of ten vectors. Each vector
2.3. LIKELIHOOD
132
contains the firing times, or a spike train, of one neuron. tastants is a list of
five vectors. Each vector contains the times at which a particular tastant was
delivered.
• There are two ways to refer an element of a list. For example, spikes[[8]]
refers to the eighth element of spikes while tastants$NaCl300 refers to the
element named NaCl300.
• Lists are useful for keeping related objects together, especially when those
objects are not the same type. In this example spikes$sig002a is a vector
whose length is the number of times neuron 002a fired, while the length
of spikes$sig002b is the number of times neuron 002b fired. Since those
lengths are not the same, the data don’t fit neatly into a matrix, so we use a
list instead.
2.3
2.3.1
Likelihood
The Likelihood Function
It often happens that we observe data from a distribution that is not known precisely but whose general form is known. For example, we may know that the data
come from a Poisson distribution, X ∼ Poi(λ), but we don’t know the value of λ.
We may know that X ∼ Bin(n, θ) but not know θ. Or we may know that the values
of X are densely clustered around some central value and sparser on both sides, so
we decide to model X ∼ N(µ, σ), but we don’t know the values of µ and σ. In these
cases there is a whole family of probability distributions indexed by either λ, θ, or
(µ, σ). We call λ, θ, or (µ, σ) the unknown parameter; the family of distributions
is called a parametric family. Often, the goal of the statistical analysis is to learn
about the value of the unknown parameter. Of course, learning which value of the
parameter is the true one, or which values of the parameter are plausible in light
of the data, is the same as learning which member of the family is the true one, or
which members of the family are plausible in light of the data.
The different values of the parameter, or the different members of the family,
represent different theories or hypotheses about nature. A sensible way to discriminate among the theories is according to how well they explain the data. Recall
the Seedlings data (Examples 1.4, 1.6, 1.7 and 1.9) in which X was the number
of new seedlings in a forest quadrat, X ∼ Poi(λ), and different values of λ repre-
2.3. LIKELIHOOD
133
sent different theories or hypotheses about the arrival rate of new seedlings. When
X turned out to be 3, how well a value of λ explains the data is measured by
Pr[X = 3 | λ]. This probability, as a function of λ, is called the likelihood function
and denoted `(λ). It says how well each value of λ explains the datum X = 3.
Figure 1.6 (pg. 19) is a plot of the likelihood function.
In a typical problem we know the data come from a parametric family indexed
by a parameter θ, i.e. X1 , . . . , Xn ∼ i.i.d.f (x | θ), but we don’t know θ. The joint
density of all the data is
Y
f (X1 , . . . , Xn | θ) =
f (Xi | θ).
(2.2)
Equation 2.2, as a function of θ, is the likelihood function. We sometimes write
f (Data | θ) instead of indicating each individual datum. To emphasize that we are
thinking of a function of θ we may also write the likelihood function as `(θ) or
`(θ | Data).
The interpretation of the likelihood function is always in terms of ratios. If, for
example, `(θ1 )/`(θ2 ) > 1, then θ1 explains the data better than θ2 . If `(θ1 )/`(θ2 ) = k,
then θ1 explains the data k times better than θ2 . To illustrate, suppose students in a
statistics class conduct a study to estimate the fraction of cars on Campus Drive that
are red. Student A decides to observe the first 10 cars and record X, the number
that are red. Student A observes
N R, R, N R, N R, N R, R, N R, N R, N R, R
and records X = 3. She did a Binomial experiment;
model is
3 her statistical
7
X ∼ Bin(10, θ); her likelihood function is `A (θ) = 10
θ
(1
−
θ)
.
It
is
plotted
in
3
Figure 2.18. Because only ratios matter, the likelihood function can be rescaled by
any arbitrary positive constant. In Figure 2.18 it has been rescaled so the maximum
is 1. The interpretation of Figure 2.18 is that values of θ around θ ≈ 0.3 explain
the data best, but that any value of θ in the interval from about 0.1 to about 0.6
explains the data not too much worse than the best. I.e., θ ≈ 0.3 explains the data
only about 10 times better than θ ≈ 0.1 or θ ≈ 0.6, and a factor of 10 is not really
very much. On the other hand, values of θ less than about 0.05 or greater than
about 0.7 explain the data much worse than θ ≈ 0.3.
Figure 2.18 was produced by the following snippet.
theta <- seq ( 0, 1, by=.01 )
y <- dbinom ( 3, 10, theta )
# some values of theta
# calculate l(theta)
134
0.8
0.6
0.4
0.2
0.0
likelihood function
1.0
2.3. LIKELIHOOD
0.0
0.2
0.4
0.6
0.8
1.0
!
Figure 2.18: Likelihood function `(θ) for the proportion θ of red cars on Campus
Drive
2.3. LIKELIHOOD
135
y <- y / max(y)
# rescale
plot ( theta, y, type="l", xlab=expression(theta),
ylab="likelihood function" )
• expression is R’s way of getting mathematical symbols and formulae into
plot labels. For more information, type help(plotmath).
To continue the example, Student B decides to observe cars until the third red
one drives by and record Y , the total number of cars that drive by until the third
red one. Students A and B went to Campus Drive at the same time and observed
the same cars. B records Y = 10. For B the likelihood function is
`B (θ) = P[Y = 10 | θ]
= P[2 reds among first 9 cars] × P[10’th car is red]
9 2
=
θ (1 − θ)7 × θ
2
9 3
=
θ (1 − θ)7
2
`B differs from `A by the multiplicative constant 92 / 10
. But since multiplicative
3
constants don’t matter, A and B really have the same likelihood function and hence
exactly the same information about θ. Student B would also use Figure 2.18 as the
plot of her likelihood function.
Student C decides to observe every car for a period of 10 minutes and record
Z1 , . . . , Zk where k is the number of cars that drive by in 10 minutes and each Zi
is either 1 or 0 according to whether the i’th car is red. When C went to Campus
Drive with A and B, only 10 cars drove by in the first 10 minutes. Therefore C
recorded exactly the same data as A and B. Her likelihood function is
`C (θ) = (1 − θ)θ(1 − θ)(1 − θ)(1 − θ)θ(1 − θ)(1 − θ)(1 − θ)θ = θ3 (1 − θ)7
`C is proportional to `A and `B and hence contains exactly the same information
and looks exactly like Figure 2.18. So even though the students planned different
experiments they ended up with the same data, and hence the same information
about θ.
The next example follows the Seedling story and shows what happens to the
likelihood function as data accumulates.
2.3. LIKELIHOOD
136
Example 2.7 (Seedlings, cont.)
Examples 1.4, 1.6, 1.7, and 1.9 reported data from a single quadrat on the number of
new seedlings to emerge in a given year. In fact, ecologists collected data from multiple
quadrats over multiple years. In the first year there were 60 quadrats and a total of 40
seedlings so the likelihood function was
`(λ) ≡ p(Data | λ)
= p(y1 , . . . , y60 | λ)
=
=
60
Y
1
60
Y
p(yi | λ)
e−λ λyi
yi !
1
−60λ 40
∝e
λ
Q
Note that yi ! is a multiplicative factor that does
P not depend on λ and so is irrelevant
to `(λ). Note also P
that `(λ) depends only on
yi , not on the individual yi ’s. I.e., we
only need to know
yi = 40; we don’t need to know the individual yi ’s. `(λ) is plotted
in Figure 2.19. Compare to Figure 1.6 (pg. 19). Figure 2.19 is much more peaked.
That’s because it reflects much more information, 60 quadrats instead of 1. The extra
information pins down the value of λ much more accurately.
Figure 2.19 was created with
lam <lik <lik <plot (
seq ( 0, 2, length=50 )
dpois ( 40, 60*lam )
lik / max(lik)
lam, lik, xlab=expression(lambda),
ylab="likelihood", type="l" )
The next example is about a possible cancer cluster in California.
Example 2.8 (Slater School)
This example was reported in Brodeur [1992]. See Lavine [1999] for further analysis.
The Slater school is an elementary school in Fresno, California where teachers and staff
were “concerned about the presence of two high-voltage transmission lines that ran past
the school . . . .” Their concern centered on the “high incidence of cancer at Slater. . . .”
0.4
0.8
137
0.0
likelihood
2.3. LIKELIHOOD
0.0
0.5
1.0
1.5
2.0
!
Figure 2.19: `(θ) after
P
yi = 40 in 60 quadrats.
To address their concern, Dr. Raymond Neutra of the California Department of Health
Services’ Special Epidemiological Studies Program conducted a statistical analysis on the
“eight cases of invasive cancer, . . . , the total years of employment of the
hundred and forty-five teachers, teachers’ aides, and staff members, . . . , [and]
the number of person-years in terms of National Cancer Institute statistics
showing the annual rate of invasive cancer in American women between the
ages of forty and forty-four — the age group encompassing the average age
of the teachers and staff at Slater — [which] enabled him to calculate that
4.2 cases of cancer could have been expected to occur among the Slater
teachers and staff members . . . .”
For our purposes we can assume that X, the number of invasive cancer cases at the
Slater School has the Binomial distribution X ∼ Bin(145, θ). We observe x = 8. The
likelihood function
`(θ) ∝ θ8 (1 − θ)137
(2.3)
is pictured in Figure 2.20. From the Figure it appears that values of θ around .05 or .06,
explain the data better than values less than .05 or greater than .06, but that values of
θ anywhere from about .02 or .025 up to about .11 explain the data reasonably well.
138
likelihood
2.3. LIKELIHOOD
0.00
0.05
0.10
0.15
0.20
!
Figure 2.20: Likelihood for Slater School
Figure 2.20 was produced by the following R code.
theta <- seq ( 0, .2, length=100 )
lik <- dbinom ( 8, 145, theta )
lik <- lik / max(lik)
plot ( theta, lik, xlab=expression(theta),
ylab="likelihood", type="l", yaxt="n" )
The first line of code creates a sequence of 100 values of θ at which to compute `(θ),
the second line does the computation, the third line rescales so the maximum likelihood
is 1, and the fourth line makes the plot.
Examples 2.7 and 2.8 show how likelihood functions are used. They reveal
which values of a parameter the data support (equivalently, which values of a parameter explain the data well) and values they don’t support (which values explain
the data poorly). There is no hard line between support and non-support. Rather,
the plot of the likelihood functions shows the smoothly varying levels of support
for different values of the parameter.
Because likelihood ratios measure the strength of evidence for or against one
2.3. LIKELIHOOD
139
hypothesis as opposed to another, it is important to ask how large a likelihood
ratio needs to be before it can be considered strong evidence. Or, to put it another
way, how strong is the evidence in a likelihood ratio of 10, or 100, or 1000, or
more? One way to answer the question is to construct a reference experiment,
one in which we have an intuitive understanding of the strength of evidence and
can calculate the likelihood; then we can compare the calculated likelihood to the
known strength of evidence.
For our reference experiment imagine we have two coins. One is a fair coin, the
other is two-headed. We randomly choose a coin. Then we conduct a sequence of
coin tosses to learn which coin was selected. Suppose the tosses yield n consecutive
Heads. P[n Heads | fair] = 2−n ; P[n Heads | two-headed] = 1. So the likelihood
ratio is 2n . That’s our reference experiment. A likelihood ratio around 8 is like
tossing three consecutive Heads; a likelihood ratio around 1000 is like tossing ten
consecutive Heads.
In Example 2.8 argmax `(θ) ≈ .055 and `(.025)/`(.055) ≈ .13 ≈ 1/8, so the
evidence against θ = .025 as opposed to θ = .055 is about as strong as the evidence
against the fair coin when three consecutive Heads are tossed. The same can be
said for the evidence against θ = .1. Similarly, `(.011)/`(.055) ≈ `(.15)/`(.055) ≈
.001, so the evidence against θ = .011 or θ = .15 is about as strong as 10 consecutive
Heads. A fair statement of the evidence is that θ’s in the interval from about θ =
.025 to about θ = .1 explain the data not much worse than the maximum of θ ≈
.055. But θ’s below about .01 or larger than about .15 explain the data not nearly
as well as θ’s around .055.
2.3.2
Likelihoods from the Central Limit Theorem
Sometimes it is not possible to compute the likelihood function exactly, either because it is too difficult or because we don’t know what it is. But we can often
compute an approximate likelihood function using the Central Limit Theorem. The
following example is the simplest case, but typifies the more exotic cases we will
see later on.
Suppose we sample X1 , X2 , . . . , Xn from a probability density f . We don’t know
what f is; we don’t even know what parametric family it belongs to. Assume that
f has a mean µ and an SD σ (I.e, assume that the mean and variance are finite.)
and that we would like to learn about µ. If (µ, σ) are the onlyQunknown parameters
then the likelihood function is `(µ, σ) = f (Data | µ, σ) =
f (Xi | µ, σ). But we
don’t know f and can’t calculate `(µ, σ).
However, we can reason as follows.
2.3. LIKELIHOOD
140
1. Most of the information in the data for learning about µ is containined in X̄.
That is, X̄ tells us a lot about µ and the deviations δi ≡ Xi − X̄, i = 1, . . . , n
tell us very little.
2. If n is large then the Central Limit Theorem tells us
√
X̄ ∼ N(µ, σ/ n), approximately
3. We can estimate σ 2 from the data by
σ̂ 2 = s2 =
X
δi2 /n
4. And therefore the function
1
`M (µ) ∝ exp −
2
µ − X̄
√
σ̂/ n
2 !
(2.4)
is a good approximation to the likelihood function.
In the preceding reasoning we separated the data into two parts — X̄ and {δi };
used {δi } to estimate σ; and used X̄ to find a likelihood function for µ. We cannot,
in general, justify such a separation mathematically. We justified it if and when our
main interest is in µ and we believe {δi } tell us little about µ.
Function 2.4 is called a marginal likelihood function. Tsou and Royall [1995]
show that marginal likelihoods are good approximations to true likelihoods and
can be used to make accurate inferences, at least in cases where the Central Limit
Theorem applies. We shall use marginal likelihoods throughout this book.
Example 2.9 (Slater School, continued)
We redo the Slater School example (Example 2.8) to illustrate the marginal likelihood
and see how it compares to the exact likelihood. In that example the Xi ’s were 1’s
and 0’s indicating which teachers got cancer. There were 8 1’s out of 145 teachers, so
X̄ = 8/145 ≈ .055. Also, σ̂ 2 = (8(137/145)2 + 137(8/145)2 ))/145 ≈ .052, so σ̂ ≈ .23.
We get
2 !
1 µ − .055
√
(2.5)
`M (µ) ∝ exp −
2 .23/ 145
Figure 2.21 shows the marginal and exact likelihood functions. The marginal likelihood
is a reasonably good approximation to the exact likelihood.
0.8
141
0.4
marginal
exact
0.0
likelihood
2.3. LIKELIHOOD
0.00
0.05
0.10
0.15
0.20
µ
Figure 2.21: Marginal and exact likelihoods for Slater School
Figure 2.21 was produced by the following snippet.
theta <- seq ( 0, .2, length=100 )
lik <- dbeta ( theta, 9, 138 )
lik.mar <- dnorm ( theta, 8/145,
sqrt((8*(137/145)^2 + 137*(8/145)^2)/145)/sqrt(145) )
lik <- lik/max(lik)
lik.mar <- lik.mar/max(lik.mar)
matplot ( theta, cbind(lik,lik.mar), xlab=expression(mu),
ylab="likelihood", type="l", lty=c(2,1), col=1 )
legend ( .1, 1, c("marginal", "exact"), lty=c(1,2) )
Example 2.10 (CEO salary)
How much are corporate CEO’s paid? Forbes magazine collected data in 1993 that can
begin to answer this question. The data are available on-line at DASL, the Data and
Story Library, a collection of data sets for free use by statistics students. DASL says
“Forbes magazine published data on the best small firms in 1993. These were
firms with annual sales of more than five and less than $350 million. Firms
2.3. LIKELIHOOD
142
were ranked by five-year average return on investment. The data extracted
are the age and annual salary of the chief executive officer for the first 60
ranked firms. In question are the distribution patterns for the ages and the
salaries.”
You can download the data from
http://lib.stat.cmu.edu/DASL/Datafiles/ceodat.html. The first few lines look
like this:
AGE SAL
53
43
33
145
621
262
In this example we treat the Forbes data as a random sample of size n = 60 of CEO
salaries for small firms. We’re interested in the average salary µ. Our approach is to
calculate the marginal likelihood function `M (µ).
Figure 2.22(a) shows a stripchart of the data. Evidently, most salaries are in the range
of $200 to $400 thousand dollars, but with a long right-hand tail. Because the righthand tail is so much larger than the left, the data are not even approximately Normally
distributed. But the Central Limit Theorem tells us that X̄ is approximately Normally
distributed, so the method of marginal likelihood applies. Figure 2.22(b) displays the
marginal likelihood function `M (µ).
Figure 2.22 was produced by the following snippet.
ceo <- read.table ("data/ceo_salaries/data",header=T)
par ( mfrow=c(2,1) )
stripchart ( ceo$SAL, "jitter", pch=1, main="(a)",
xlab="Salary (thousands of dollars)" )
m <s <x <y <y <plot
mean ( ceo$SAL, na.rm=T )
sqrt ( var(ceo$SAL,na.rm=T) / (length(ceo$SAL)-1) )
seq ( 340, 470, length=40 )
dnorm ( x, m, s )
y / max(y)
( x, y, type="l", xlab="mean salary",
2.3. LIKELIHOOD
143
(a)
0
200
400
600
800
1000
Salary (thousands of dollars)
0.6
0.2
likelihood
1.0
(b)
340
360
380
400
420
440
460
mean salary
Figure 2.22: Marginal likelihood for mean CEO salary
2.3. LIKELIHOOD
144
ylab="likelihood", main="(b)" )
• In s <- sqrt ... the (length(ceo$SAL)-1) is there to account for one missing
data point.
• y <- y / max(y) doesn’t accomplish much and could be omitted.
• The data strongly support the conclusion that the mean salary is between about
$350 and $450 thousand dollars. That’s much smaller than the range of salaries
on display in Figure 2.22(a). Why?
• Is inference about the mean salary useful in this data set? If not, what would be
better?
2.3.3
Likelihoods for several parameters
What if there are two unknown parameters? Then the likelihood is a function of
two variables. For example, if the Xi ’s are a sample from N(µ, σ) then the likelihood
is a function of (µ, σ). The next example illustrates the point.
Example 2.11 (FACE, continued)
This example continues Example 1.12 about a FACE experiment in Duke Forest. There
were six rings; three were treated with excess CO2 . The dominant canopy tree in the
FACE experiment is pinus taeda, or loblolly pine. Figure 2.23a is a histogram of the final
basal area of each loblolly pine in 1998 divided by its initial basal area in 1996. It shows
that the trees in Ring 1 grew an average of about 30% but with variability that ranged
from close to 0% on the low end to around 50% or 60% on the high end. Because the
data are clustered around a central value and fall off roughly equally on both sides they
can be well approximated by a Normal distribution. But with what mean and SD? What
values of (µ, σ) might reasonably produce the histogram in Figure 2.23a?
2.3. LIKELIHOOD
145
The likelihood function is
`(µ, σ) =
=
n
Y
1
n
Y
1
f (xi | µ, σ)
√
1
2
1
e− 2σ2 (xi −µ)
2πσ
1
∝ σ −n e− 2σ2
Pn
2
1 (xi −µ)
Figure 2.23b is a contour plot of the likelihood function. The dot in the center, where
(µ, σ) ≈ (1.27, .098), is where the likelihood function is highest. That is the value of
(µ, σ) that best explains the data. The next contour line is drawn where the likelihood
is about 1/4 of its maximum; then the next is at 1/16 the maximum, the next at 1/64,
and the last at 1/256 of the maximum. They show values of (µ, σ) that explain the data
less and less well.
Ecologists are primarily interested in µ because they want to compare the µ’s from
different rings to see whether the excess CO2 has affected the average growth rate.
(They’re also interested in the σ’s, but that’s a secondary concern.) But ` is a function
of both µ and σ, so it’s not immediately obvious that the data tell us anything about µ
by itself. To investigate further, Figure 2.23c shows slices through the likelihood function
at σ = .09, .10, and.11, the locations of the dashed lines in Figure 2.23b. The three
curves are almost identical. Therefore, the relative support for different values of µ does
not depend very much on the value of σ, and therefore we are justified in interpreting
any of the curves in Figure 2.23c as a “likelihood function” for µ alone, showing how well
different values of µ explain the data. In this case, it looks as though values of µ in the
interval (1.25, 1.28) explain the data much better than values outside that interval.
Figure 2.23 was produced with
par ( mfrow=c(2,2) ) # a 2 by 2 array of plots
x <- ba98$BA.final / ba96$BA.init
x <- x[!is.na(x)]
hist ( x, prob=T, xlab="basal area ratio",
ylab="", main="(a)" )
mu <- seq ( 1.2, 1.35, length=50 )
sd <- seq ( .08, .12, length=50 )
lik <- matrix ( NA, 50, 50 )
for ( i in 1:50 )
for ( j in 1:50 )
2.3. LIKELIHOOD
146
(b)
0
0.10
0.08
1
0.09
2
!
3
0.11
4
5
0.12
(a)
1.0
1.2
1.4
1.6
basal area ratio
1.20
1.30
µ
0.6
0.4
0.0
0.2
likelihood
0.8
1.0
(c)
1.20
1.30
µ
Figure 2.23: FACE Experiment, Ring 1.
(a): (1998 final basal area) ÷
(1996 initial basal area); (b): contours of the likelihood function. (c): slices of
the likelihood function.
2.3. LIKELIHOOD
147
lik[i,j] = prod ( dnorm ( x, mu[i], sd[j] ) )
lik <- lik / max(lik)
contour ( mu, sd, lik, levels=4^(-4:0), drawlabels=F,
xlab=expression(mu), ylab=expression(sigma),
main="(b)" )
abline ( h = c (.09, .1, .11 ), lty=2 )
lik.09 <- lik[,13] / max(lik[,13])
lik.10 <- lik[,26] / max(lik[,26])
lik.11 <- lik[,38] / max(lik[,38])
matplot ( mu, cbind ( lik.09, lik.10, lik.11 ), type="l",
col=1, main="(c)",
xlab=expression(mu), ylab="likelihood" )
• The line x <- x[!is.na(x)] is there because some data is missing. This line
selects only those data that are not missing and keeps them in x. When x is a
vector, is.na(x) is another vector, the same length as x, with TRUE or FALSE,
indicating where x is missing. The ! is “not”, or negation, so x[!is.na(x)]
selects only those values that are not missing.
• The lines mu <- ... and sd <- ... create a grid of µ and σ values at which to
evaluate the likelihood.
• The line lik <- matrix ( NA, 50, 50 ) creates a matrix for storing the values
of `(µ, σ) on the grid. The next three lines are a loop to calculate the values and
put them in the matrix.
• The line lik <- lik / max(lik) rescales all the values in the matrix so the
maximum value is 1. Rescaling makes it easier to set the levels in the next line.
• contour produces a contour plot. contour(mu,sd,lik,...) specifies the
values on the x-axis, the values on the y-axis, and a matrix of values on the
grid. The levels argument says at what levels to draw the contour lines, while
drawlabels=F says not to print numbers on those lines. (Make your own contour
plot without using drawlabels to see what happens.)
• abline is used for adding lines to plots. You can say either abline(h=...) or
abline(v=...) to get horizontal and vertical lines, or
abline(intercept,slope) to get arbitrary lines.
2.3. LIKELIHOOD
148
• lik.09, lik.10, and lik.11 pick out three columns from the lik matrix. They
are the three columns for the values of σ closest to σ = .09, .10, .11. Each column
is rescaled so its maximum is 1.
Example 2.12 (Quiz Scores, continued)
This example continues Example 2.3 about scores in Statistics 103. Figure 2.7 shows
that most students scored between about 5 and 10, while 4 students were well below
the rest of the class. In fact, those students did not show up for every quiz so their
averages were quite low. But the remaining students’ scores were clustered together in
a way that can be adequately described by a Normal distribution. What do the data say
about (µ, σ)?
Figure 2.24 shows the likelihood function. The data support values of µ from about
7.0 to about 7.6 and values of σ from about 0.8 to about 1.2. A good description of the
data is that most of it follows a Normal distribution with (µ, σ) in the indicated intervals,
except for 4 students who had low scores not fitting the general pattern. Do you think
the instructor should use this analysis to assign letter grades and, if so, how?
Figure 2.24 was produced by
x <- sort(scores.ave)[5:58]
mu <- seq ( 6.8, 7.7, length=60 )
sig <- seq ( .7, 1.3, length=60 )
lik <- matrix ( NA, 60, 60 )
for ( i in 1:60 )
for ( j in 1:60 )
lik[i,j] <- prod ( dnorm ( x, mu[i], sig[j] ) )
lik <- lik/max(lik)
contour ( mu, sig, lik, xlab=expression(mu),
ylab=expression(sigma) )
Examples 2.11 and 2.12 have likelihood contours that are roughly circular, indicating that the likelihood function for one parameter does not depend very strongly
on the value of the other parameter, and so we can get a fairly clear picture of what
the data say about one parameter in isolation. But in other data sets two parameters may be inextricably entwined. Example 2.13 illustrates the problem.
149
1.0
0.9
0.8
0.7
!
1.1
1.2
1.3
2.3. LIKELIHOOD
6.8
7.0
7.2
7.4
7.6
µ
Figure 2.24: Likelihood function for Quiz Scores
2.3. LIKELIHOOD
150
Example 2.13 (Seedlings, continued)
Examples 1.4, 1.6, and 1.7 introduced an observational study by ecologists to learn
about tree seedling emergence and survival. Some species, Red Maple or acer rubrum for
example, get a mark called a bud scale scar when they lose their leaves over winter. By
looking for bud scale scars ecologists can usually tell whether an acer rubrum seedling is
New (in its first summer), or Old (already survived through at least one winter). When
they make their annual observations they record the numbers of New and Old acer rubrum
seedlings in each quadrat. Every Old seedling in year t must have been either a New or
an Old seedling in year t − 1.
Table 2.1 shows the 1992–1993 data for quadrat 6. Clearly the data are inconsistent;
where did the Old seedling come from in 1993? When confronted with this paradox the
ecologists explained that some New seedlings emerge from the ground after the date of
the Fall census but before the winter. Thus they are not counted in the census their first
year, but develop a bud scale scar and are counted as Old seedlings in their second year.
One such seedling must have emerged in 1992, accounting for the Old seedling in 1993.
Year
1992
1993
No. of New seedlings
0
0
No. of Old seedlings
0
1
Table 2.1: Numbers of New and Old seedlings in quadrat 6 in 1992 and 1993.
How shall we model the data? Let NiT be the true number of New seedlings in year
i, i.e., including those that emerge after the census; and let NiO be the observed number
of seedlings in year i, i.e., those that are counted in the census. As in Example 1.4 we
model NiT ∼ Poi(λ). Furthermore, each seedling has some chance θf of being found in
the census. (Nominally θf is the proportion of seedlings that emerge before the census,
but in fact it may also include a component accounting for the failure of ecologists to
find seedlings that have already emerged.) Treating the seedlings as independent and all
having the same θf leads to the model NiO ∼ Bin(NiT , θf ). The data are the NiO ’s; the
NiT ’s are not observed. What do the data tell us about the two parameters (λ, θf )?
O
= 0. Dropping the
Ignore the Old seedlings for now and just look at 1992 data N1992
2.3. LIKELIHOOD
151
subscript 1992, the likelihood function is
`(λ, θf ) = P[N O = 0 | λ, θf ]
∞
X
=
P[N O = 0, N T = n | λ, θf ]
n=0
=
=
∞
X
n=0
∞
X
n=0
=
P[N T = n | λ] P[N O = 0 | N T = n, θf ]
e−λ λn
(1 − θf )n
n!
(2.6)
∞
X
e−λ(1−θf ) (λ(1 − θf ))n
n=0
−λθf
eλθf n!
=e
Figure 2.25a plots log10 `(λ, θf ). (We plotted log10 ` instead of ` for variety.) The
contour lines are not circular. To see what that means, focus on the curve log10 `(λ, θf ) =
−1 which runs from about (λ, θf ) = (2.5, 1) to about (λ, θf ) = (6, .4). Points (λ, θf )
along that curve explain the datum N O = 0 about 1/10 as well as the m.l.e.(The m.l.e.
is any pair where either λ = 0 or θf = 0.) Points below and to the left of that curve
explain the datum better than 1/10 of the maximum.
The main parameter of ecological interest is λ, the rate at which New seedlings tend
to arrive. The figure shows that values of λ as large as 6 can have reasonably large
likelihoods and hence explain the data reasonably well, at least if we believe that θf
might be as small as .4. To investigate further, Figure 2.25b is similar to 2.25a but
includes values of λ as large as 1000. It shows that even values of λ as large as 1000 can
have reasonably large likelihoods if they’re accompanied by sufficiently small values of θf .
In fact, arbitrarily large values of λ coupled with sufficiently small values of θf can have
arbitrarily large likelihoods. So from the data alone, there is no way to rule out extremely
large values of λ. Of course extremely large values of λ don’t make ecological sense, both
in their own right and because extremely small values of θf are also not sensible. Scientific
background information of this type is incorporated into statistical analysis often through
Bayesian inference (Section 2.5). But the point here is that λ and θf are linked, and the
data alone does not tell us much about either parameter individually.
Figure 2.25(a) was produced with the following snippet.
lam <- seq ( 0, 6, by=.1 )
2.3. LIKELIHOOD
152
0.4
0.0
"f
0.8
(a)
0
1
2
3
4
5
6
!
0.4
0.0
"f
0.8
(b)
0
200
400
600
800
1000
!
Figure 2.25: Log of the likelihood function for (λ, θf ) in Example 2.13
2.3. LIKELIHOOD
153
th <- seq ( 0, 1, by=.02 )
lik <- matrix ( NA, length(lam), length(th) )
for ( i in seq(along=lam) )
for ( j in seq(along=th) )
lik[i,j] <- exp ( -lam[i]*th[j] )
contour ( lam, th, log10(lik),
levels=c(0,-.2,-.6,-1,-1.5,-2),
xlab=expression(lambda),
ylab=expression(theta[f]), main="(a)" )
• log10 computes the base 10 logarithm.
Figure 2.25(b) was produced with the following snippet.
lam2 <- seq ( 0, 1000, by=1 )
lik2 <- matrix ( NA, length(lam2), length(th) )
for ( i in seq(along=lam2) )
for ( j in seq(along=th) )
lik2[i,j] <- exp ( -lam2[i]*th[j] )
contour ( lam2, th, log10(lik2), levels=c(0,-1,-2,-3),
xlab=expression(lambda),
ylab=expression(theta[f]), main="(b)" )
We have now seen two examples (2.11 and 2.12) in which likelihood contours
are roughly circular and one (2.13) in which they’re not. By far the most common
and important case is similar to Example 2.11 because it applies when the Central
Limit Theorem applies. That is, there are many instances in which we are trying
to make an inference about a parameter θ and can invoke the Central Limit Theorem saying that for some statistic t, t ∼ N(θ, σt ) approximately and where we can
estimate σt . In these cases we can, if necessary, ignore any other parameters in the
problem and make an inference about θ based on `M (θ).
2.4. ESTIMATION
2.4
154
Estimation
Sometimes the purpose of a statistical analysis is to compute a single best guess
at a parameter θ. An informed guess at the value of θ is called an estimate and
denoted θ̂. One way to estimate θ is to find θ̂ ≡ argmax `(θ), the value of θ for
which `(θ) is largest and hence the value of θ that best explains the data. That’s
the subject of Section 2.4.1.
2.4.1
The Maximum Likelihood Estimate
In many statistics problems there is a unique value of θ that maximizes `(θ). This
value is called the maximum likelihood estimate, or m.l.e. of θ and denoted θ̂.
θ̂ ≡ argmaxθ p(y | θ) = argmaxθ `(θ).
For instance, in Example 2.8 and Figure 2.20 θ was the rate of cancer occurence
and we calculated `(θ) based on y = 8 cancers in 145 people. Figure 2.20 suggests
that the m.l.e. is about θ̂ ≈ .05.
When `(θ) is differentiable, the m.l.e. can be found by differentiating and equating to zero. In Example 2.8 the likelihood was `(θ) ∝ θ8 (1 − θ)137 . The derivative
is
d`(θ)
∝ 8θ7 (1 − θ)137 − 137θ8 (1 − θ)136
dθ
= θ7 (1 − θ)136 [8(1 − θ) − 137θ]
(2.7)
Equating to 0 yields
0 = 8(1 − θ) − 137θ
145θ = 8
θ = 8/145 ≈ .055
So θ̂ ≈ .055 is the m.l.e. Of course if the mode is flat, there are multiple modes,
the maximum occurs at an endpoint, or ` is not differentiable, then more care is
needed.
Equation 2.7 shows more generally the m.l.e. for Binomial data. Simply replace
137 with n − y and 8 with y to get θ̂ = y/n. In the Exercises you will be asked to
find the m.l.e. for data from other types of distributions.
There is a trick that is often useful for finding m.l.e.’s. Because log is a monotone
function, argmax `(θ) = argmax log(`(θ)), so the m.l.e. can be found by maximizing
2.4. ESTIMATION
155
Q
P
log `. For i.i.d. data, `(θ) = p(yi | θ), log `(θ) = log p(xi | θ), and it is often easier
to differentiate the sum than the product. For the Slater example the math would
look like this:
log `(θ) = 8 log θ + 137 log(1 − θ)
d log `(θ)
8
137
= −
dθ
θ 1−θ
8
137
=
1−θ
θ
137θ = 8 − 8θ
8
.
θ=
145
Equation 2.7 shows that if y1 , . . . , yn ∼ Bern(θ) then the m.l.e. of θ is
X
θ̂ = n−1
yi = sample mean
The Exercises ask you to show the following.
1. If y1 , . . . , yn ∼ N(µ, σ) then the m.l.e. of µ is
X
µ̂ = n−1
yi = sample mean
2. If y1 , . . . , yn ∼ Poi(λ) then the m.l.e. of λ is
X
λ̂ = n−1
yi = sample mean
3. If y1 , . . . , yn ∼ Exp(λ) then the m.l.e. of λ is
X
λ̂ = n−1
yi = sample mean
2.4.2
Accuracy of Estimation
Finding the m.l.e. is not enough. Statisticians want to quantify the accuracy of θ̂
as an estimate of θ. In other words, we want to know what other values of θ, in
addition to θ̂, have reasonably high likelihood (provide a reasonably good explanation of the data). And what does “reasonable” mean? Section 2.4.2 addresses
this question.
2.4. ESTIMATION
156
As we saw from the reference experiment in section 2.3, the evidence is not
very strong against any value of θ such that `(θ) > `(θ̂)/10. So when considering
estimation accuracy it is useful to think about sets such as
)
(
`(θ)
≥ .1
LS.1 ≡ θ :
`(θ̂)
LS stands for likelihood set. More generally, for any α ∈ (0, 1) we define the likelihood set of level α to be
)
(
`(θ)
≥α
LSα ≡ θ :
`(θ̂)
LSα is the set of θ’s that explain the data reasonbly well, and therefore the set of
θ’s best supported by the data, where the quantification of “reasonable” and “best”
are determined by α. The notion is only approximate and meant as a heuristic
reference; in reality there is no strict cutoff between reasonable and unreasonable
values of θ. Also, there is no uniquely best value of α. We frequently use α ≈ .1 for
convenience and custom.
In many problems the likelihood function `(θ) is continuous and unimodal, i.e.
strictly decreasing away from θ̂, and goes to 0 as θ → ±∞, as in Figures 2.19
and 2.20. In these cases, θ ≈ θ̂ ⇒ `(θ) ≈ `(θ̂). So values of θ close to θ̂ explain the
data almost as well as and are about as plausible as θ̂ and LSα is an interval
LSα = [θl , θu ]
where θl and θu are the lower and upper endpoints, respectively, of the interval.
In Example 2.9 (Slater School) θ̂ = 8/145, so we can find `(θ̂) on a calculator,
or by using R’s built-in function
dbinom ( 8, 145, 8/145 )
which yields about .144. Then θl and θu can be found by trial and error. Since
dbinom(8,145,.023) ≈ .013 and dbinom(8,145,.105) ≈ .015, we conclude that
LS.1 ≈ [.023, .105] is a rough likelihood interval for θ. Review Figure 2.20 to see
whether this interval makes sense.
The data in Example 2.9 could pin down θ to an interval of width about .08.
In general, an experiment will pin down θ to an extent determined by the amount
of information in the data. As data accumulates so does information and the ability to determine θ. Typically the likelihood function becomes increasingly more
peaked as n → ∞, leading to increasingly accurate inference for θ. We saw that in
Figures 1.6 and 2.19. Example 2.14 illustrates the point further.
2.4. ESTIMATION
157
0.6
0.4
0.0
0.2
likelihood
0.8
1.0
Example 2.14 (Craps, continued)
Example 1.10 introduced a computer simulation to learn the probability θ of winning the
game of craps. In this example we use that simulation to illustrate the effect of gathering
ever increasing amounts of data. We’ll start by running the simulation just a few times,
and examining the likelihood function `(θ). Then we’ll add more and more simulations
and see what happens to `(θ).
The result is in Figure 2.26. The flattest curve is for 3 simulations, and the curves
become increasingly peaked for 9, 27, and 81 simulations. After only 3 simulations
LS.1 ≈ [.15, .95] is quite wide, reflecting the small amount of information. But after
9 simulations `(θ) has sharpened so that LS.1 ≈ [.05, .55] is much smaller. After 27
simulations LS.1 has shrunk further to about [.25, .7], and after 81 it has shrunk even
further to about [.38, .61].
0.0
0.2
0.4
0.6
0.8
1.0
!
Figure 2.26: Likelihood function for the probability θ of winning a game of craps.
The four curves are for 3, 9, 27, and 81 simulations.
2.4. ESTIMATION
158
Figure 2.26 was produced with the following snippet.
n.sim <- c ( 3, 9, 27, 81 )
th <- seq ( 0, 1, length=200 )
lik <- matrix ( NA, 200, length(n.sim) )
for ( i in seq(along=n.sim) ) {
wins <- 0
for ( j in 1:n.sim[i] )
wins <- wins + sim.craps()
lik[,i] <- dbinom ( wins, n.sim[i], th )
lik[,i] <- lik[,i] / max(lik[,i])
}
matplot ( th, lik, type="l", col=1, lty=1:4,
xlab=expression(theta), ylab="likelihood" )
In Figure 2.26 the likelihood function looks increasingly like a Normal density
as the number of simulations increases. That is no accident; it is the typical behavior in many statistics problems. Section 2.4.3 explains the reason.
2.4.3
The sampling distribution of an estimator
The estimator θ̂ is a function of the data y1 , . . . , yn . If we repeat the experiment and
get new data we also get a new θ̂. So θ̂ is a random variable and has a distribution
called the sampling distribution of θ̂ and denoted Fθ̂ . We studied Fθ̂ in Example 1.11
where we used simulation to estimate the probability θ of winning a game of craps.
For each sample size of n = 50, 200, 1000 we did 1000 simulations. Each simulation
yielded a different θ̂. Those 1000 θ̂’s are a random sample of size 1000 from Fθ̂ .
Figure 1.19 showed boxplots of the simulations.
Now we examine the sampling distribution of θ̂ in more detail. There are at
least two reasons for doing so. First, Fθ̂ is another way, in addition to likelihood
sets, of assessing the accuracy of θ̂ as an estimator of θ. If Fθ̂ is tightly concentrated
around θ then θ̂ is highly accurate. Conversely, if Fθ̂ is highly dispersed, or not
centered around θ, then θ̂ is an inaccurate estimator. Second, we may want to
compare two possible estimators. I.e., if there are two potential estimators θ̂1 and
2.4. ESTIMATION
159
θ̂2 , we can compare Fθ̂1 and Fθ̂2 and use the estimator whose sampling distribution
is most tightly concentrated around θ.
To illustrate, let’s suppose we sample y1 , . . . , yn from distribution FY , and want
to estimateP
θ ≡ E[Y ]. We consider two potential estimators, the sample mean
θ̂1 = (1/n) yi and the sample median θ̂2 . To see which estimator is better we
do a simulation, as shown in the following snippet. The simulation is done at four
different sample sizes, n = 4, 16, 64, 256, to see whether sample size matters. Here
we’ll let FY be N(0, 1). But the choice between θ̂1 and θ̂2 might depend on what FY
is, so a more thorough investigation would consider other choices of FY .
We do 1000 simulations at each sample size. Figure 2.27 shows the result. The
figure suggests that the sampling distributions of both θ̂1 and θ̂2 are centered at the
true value of θ. The distribution of θ̂1 is slightly less variable than that of θ̂2 , but
not enough to make much practical difference.
Figure 2.27 was produced by the following snippet.
sampsize <- c ( 4, 16, 64, 256 )
n.sim <- 1000
par ( mfrow=c(2,2) )
for ( i in seq(along=sampsize) ) {
y <- matrix ( rnorm ( n.sim*sampsize[i], 0, 1 ),
nrow=sampsize[i], ncol=n.sim )
that.1 <- apply ( y, 2, mean )
that.2 <- apply ( y, 2, median )
boxplot ( that.1, that.2, names=c("mean","median"),
main=paste("(",letters[i],")",sep="") )
abline ( h=0, lty=2 )
}
For us, comparing θ̂1 to θ̂2 is only a secondary point of the simulation. The main
point is four-fold.
1. An estimator θ̂ is a random variable and has a distribution.
2. Fθ̂ is a guide to estimation accuracy.
3. Statisticians study conditions under which one estimator is better than another.
2.4. ESTIMATION
160
(b)
!2
!1.0
!1
0
0.0
1
0.5
(a)
mean
median
mean
(d)
!0.4
!0.2
0.0
0.0
0.4
0.2
(c)
median
mean
median
mean
median
Figure 2.27: Sampling distribution of θ̂1 , the sample mean and θ̂2 , the sample
median. Four different sample sizes. (a): n=4; (b): n=16; (c): n=64; (d):
n=256
2.4. ESTIMATION
161
4. Simulation is useful.
When the m.l.e. is the sample mean, as it is when FY is a Bernoulli, Normal,
Poisson or Exponential distribution, the Central Limit Theorem tells us that in large
samples, θ̂ is approximately Normally distributed. Therefore, in these cases, its
distribution can be well described by its mean and SD. Approximately,
θ̂ ∼ N(µθ̂ , σθ̂ ).
where
µθ̂ = µY
σY
σθ̂ = √
n
(2.8)
both of which can be easily estimated from the sample. So we can use the sample
to compute a good approximation to the sampling distribution of the m.l.e.
To see that more clearly, let’s make 1000 simulations of the m.l.e. in n =
5, 10, 25, 100 Bernoulli trials with p = .1. We’ll make histograms of those simulations and overlay them with kernel density estimates and Normal densities. The
parameters of the Normal densities will be estimated from the simulations. Results
are shown in Figure 2.28.
Figure 2.28 was produced by the following snippet.
sampsize <- c ( 5, 10, 25, 100 )
n.sim <- 1000
p.true <- .1
par(mfrow=c(2,2))
for ( i in seq(along=sampsize) ) {
# n.sim Bernoulli samples of sampsize[i]
y <- matrix ( rbinom ( n.sim*sampsize[i], 1, p.true ),
nrow=n.sim, ncol=sampsize[i] )
# for each sample, compute the mean
t.hat <- apply ( y, 1, mean )
# histogram of theta hat
hist ( t.hat, prob=T,
xlim=c(0,.6), xlab=expression(hat(theta)),
ylim=c(0,14), ylab="density",
2.4. ESTIMATION
162
0.2
0.4
0.6
0.0
0.4
(c)
(d)
0.6
0.0
0.2
0.4
!^
0.6
0 2 4 6 8
density
12
!^
0 2 4 6 8
density
0.2
!^
12
0.0
0 2 4 6 8
density
0 2 4 6 8
density
12
(b)
12
(a)
0.0
0.2
0.4
0.6
!^
Figure 2.28: Histograms of θ̂, the sample mean, for samples from Bin(n, .1). Dashed
line: kernel density estimate. Dotted line: Normal approximation. (a): n=4; (b):
n=16; (c): n=64; (d): n=256
2.4. ESTIMATION
163
main=paste ( "(", letters[i], ")", sep="" )
)
# kernel density estimate of theta hat
lines ( density ( t.hat ), lty=2 )
# Normal approximation to density of theta hat,
# calculated from the first sample
m <- mean(y[1,])
sd <- sd(y[1,])/sqrt(sampsize[i])
t <- seq ( min(t.hat), max(t.hat), length=40 )
lines ( t, dnorm ( t, m, sd ), lty=3 )
}
Notice that the Normal approximation is not very good for small n. That’s because the underlying distribution FY is highly skewed, nothing at all like a Normal
distribution. In fact, R was unable to compute the Normal approximation for n = 5.
But for large n, the Normal approximation is quite good. That’s the Central Limit
Theorem kicking in. For any n, we can use the sample to estimate the parameters
in Equation 2.8. For small n, those parameters don’t help us much. But for n = 256,
they tell us a lot about the accuracy of θ̂, and the Normal approximation computed
from the first sample is a good match to the sampling distribution of θ̂.
The SD of an estimator is given a special name. It’s called the standard error or
SE of the estimator because it measures the typical size of estimation errors |θ̂ − θ|.
When θ̂ ∼ N(µθ̂ , σθ̂ ), approximately, then σθ̂ is the SE. For any Normal distribution,
about 95% of the mass is within ±2 standard deviations of the mean. Therefore,
Pr[|θ̂ − θ| ≤ 2σθ̂ ] ≈ .95
In other words, estimates are accurate to within about two standard errors about
95% of the time, at least when Normal theory applies.
We have now seen two ways of assessing estimation accuracy — through `(θ)
and through Fθ̂ . Often these two apparently different approaches almost coincide.
That happens under the following conditions.
√
1. When θ̂ ∼ N(θ, σθ̂ ), and σθ̂ ≈ σ/ n, an approximation often justified by the
Central Limit Theorem, then we can estimate θ to within about ±2σθ , around
2.5. BAYESIAN INFERENCE
164
95% of the time. So the interval (θ̂ − 2σθ̂ , θ̂ + 2σθ̂ ) is a reasonable estimation
interval.
2. When most of the information in the data come from the sample mean, and
in other
a marginal likelihood argument applies, then `(θ) ≈
cases when
2
θ−√Ȳ
(Equation 2.4) and LS.1 ≈ (θ̂ − 2σθ̂ , θ̂ + 2σθ̂ ). So the two
exp − 12 σ̂/
n
intervals are about the same.
2.5
Bayesian Inference
The essence of Bayesian inference is using probability distributions to describe our
state of knowledge of some parameter of interest, θ. We construct p(θ), either a
pmf or pdf, to reflect our knowledge by making p(θ) large for those values of θ
that seem most likely, and p(θ) small for those values of θ that seem least likely,
according to our state of knowledge. Although p(θ) is a probability distribution, it
doesn’t necessarily mean that θ is a random variable. Rather, p(θ) encodes our state
of knowledge. And different people can have different states of knowledge, hence
different probability distributions. For example, suppose you toss a fair coin, look
at it, but don’t show it to me. The outcome is not random; it has already occured
and you know what it is. But for me, each outcome is equally likely. I would encode
my state of knowledge by assigning P(H) = P(T) = 1/2. You would encode your
state of knowledge by assigning either P(H) = 1 or P(T) = 1 according to whether
the coin was Heads or Tails. After I see the coin I would update my probabilities to
be the same as yours.
For another common example, consider horse racing. When a bettor places a
bet at 10 to 1, she is paying $1 for a ticket that will pay $10 if the horse wins. Her
expected payoff for that bet is −$1 + P[horse wins] × $10. For that to be a good
deal she must think that P[horse wins] ≥ .1. Of course other bettors may disagree.
Here are some other examples in which probability distributions must be assessed.
• In deciding whether to fund Head Start, legislators must assess whether the
program is likely to be beneficial and, if so, the degree of benefit.
• When investing in the stock market, investors must assess the future probability distributions of stocks they may buy.
• When making business decisions, firms must assess the future probability
distributions of outcomes.
2.5. BAYESIAN INFERENCE
165
• Weather forecasters assess the probability of rain.
• Public policy makers must assess whether the observed increase in average
global temperature is anthropogenic and, if so, to what extent.
• Doctors and patients must assess and compare the distribution of outcomes
under several alternative treatments.
• At the Slater School, Example 2.8, teachers and administrators must assess their probability distribution for θ, the chance that a randomly selected
teacher develops invasive cancer.
Information of many types goes into assessing probability distributions. But it is
often useful to divide the information into two types: general background knowledge and information specific to the situation at hand. How do those two types
of information combine to form an overall distribution for θ? Often we begin by
summarizing just the background information as p(θ), the marginal distribution of
θ. The specific information at hand is data which we can model as p(y1 , . . . , yn | θ),
the conditional distribution of y1 , . . . , yn given θ. Next, the marginal and conditional densities are combined to give the joint distribution p(y1 , . . . , yn , θ). Finally,
the joint distribution yields p(θ | y1 , . . . , yn ) the conditional distribution of θ given
y1 , . . . , yn . And p(θ | y1 , . . . , yn ) represents our state of knowledge accounting for
both the background information and the data specific to the problem at hand.
p(θ) is called the prior distribution and p(θ | y1 , . . . , yn ) is the posterior distribution.
A common application is in medical screening exams. Consider a patient being
screened for a rare disease, one that affects 1 in 1000 people, say. The disease
rate in the population is background information; the patient’s response on the
screening exam is data specific to this particular patient. Define an indicator variable D by D = 1 if the patient has the disease and D = 0 if not. Define a second
random variable T by T = 1 if the test result is positive and T = 0 if the test
result is negative. And suppose the test that is 95% accurate in the sense that
P[T = 1 | D = 1] = P[T = 0 | D = 0] = .95. Finally, what is the chance that
the patient has the disease given that the test is positve? In other words, what is
P[D = 1 | T = 1]?
We have the marginal distribution of D and the conditional distribution of T
given D. The procedure is to find the joint distribution of (D, T), then the condi-
2.5. BAYESIAN INFERENCE
166
tional distribution of D given T. The math is
P[D = 1 and T = 1]
P[T = 1]
P[D = 1 and T = 1]
=
P[T = 1 and D = 1] + P[T = 1 and D = 0]
P[D = 1] P[T = 1 | D = 1]
(2.9)
=
P[D = 1] P[T = 1 | D = 1] + P[D = 0] P[T = 1 | D = 0]
(.001)(.95)
=
(.001)(.95) + (.999)(.05)
.00095
=
≈ .019.
.00095 + .04995
That is, a patient who tests positive has only about a 2% chance of having the
disease, even though the test is 95% accurate.
Many people find this a surprising result and suspect a mathematical trick. But a
quick heuristic check says that out of 1000 people we expect 1 to have the disease,
and that person to test positive; we expect 999 people not to have the disease
and 5% of those, or about 50, to test positive; so among the 51 people who test
postive, only 1, or a little less than 2%, has the disease. The math is correct. This
is an example where most people’s intuition is at fault and careful attention to
mathematics is required in order not to be led astray.
What is the likelihood function in this example? There are two possible values
of the parameter, hence only two points in the domain of the likelihood function,
D = 0 and D = 1. So the likelihood function is
P[D = 1 | T = 1] =
`(0) = .05;
`(1) = .95
Here’s another way to look at the medical screening problem, one that highlights
the multiplicative nature of likelihood.
P[D = 1 and T = 1]
P[D = 1 | T = 1]
=
P[D = 0 | T = 1]
P[D = 0 and T = 1]
P[D = 1] P[T = 1 | D = 1]
=
P[D = 0] P[T = 1 | D = 0]
P[D = 1]
P[T = 1 | D = 1]
=
P[D = 0]
P[T = 1 | D = 0]
1
.95
=
999
.05
≈ .019
2.5. BAYESIAN INFERENCE
167
The LHS of this equation is the posterior odds of having the disease. The penultimate line shows that the posterior odds is the product of the prior odds and the
likelihood ratio. Specifically, to calculate the posterior, we need only the likelihood
ratio, not the absolute value of the likelihood function. And likelihood ratios are
the means by which prior odds get transformed into posterior odds.
Let’s look more carefully at the mathematics in the case where the distributions
have densities. Let y denote the data, even though in practice it might be y1 , . . . , yn .
p(θ, y)
p(y)
p(θ, y)
=R
p(θ, y) dθ
p(θ)p(y | θ)
=R
p(θ)p(y | θ) dθ
p(θ | y) =
(2.10)
Equation 2.10 is the same as Equation 2.9, only in more general terms. Since we
are treating the data as given and p(θ | y) as a function of θ, we are justified in
writing
p(θ)`(θ)
p(θ | y) = R
p(θ)`(θ) dθ
or
p(θ)`(θ)
p(θ | y) =
c
R
where c = p(θ)`(θ) dθ is a constant that does not depend on θ. (An integral
with respect to θ does not depend on θ; after integration it does not contain θ.)
The effect of the constant
c is to rescale the function in the numerator so that it
R
integrates to 1. I.e., p(θ | y) dθ = 1. And since c plays this role, the likelihood
function can absorb an arbitrary constant which will ultimately be compensated
for by c. One often sees the expression
p(θ | y) ∝ p(θ)`(θ)
(2.11)
where the unmentioned constant of proportionality is c.
We can find
c either through Equation 2.10 or by using Equation 2.11, then
R
setting c = [ p(θ)`(θ) dθ]−1 . Example 2.15 illustrates the second approach.
Example 2.15 (Seedlings, continued)
Recall the Seedlings examples (1.4, 1.6, 1.7, 1.9, 2.7, and 2.13) which modelled the
number of New seedling arrivals as Poi(λ). Prior to the experiment ecologists knew
2.5. BAYESIAN INFERENCE
168
quite a bit about regeneration rates of acer rubrum in the vicinity of the experimental
quadrats. They estimated that New seedlings would arise at a rate most likely around .5
to 2 seedlings per quadrat per year and less likely either more or less than that. Their
knowledge could be encoded in the prior density displayed in Figure 2.29 which is p(λ) =
4λ2 e−2λ . (This is the Gam(3, 1/2) density; see Section 5.5.) Figure 2.29 also displays
the likelihood function p(y | λ) ∝ λ3 e−λ found in Example 1.4 and Figure 1.6. Therefore,
according to Equation 2.11, the posterior density is p(λ | y) ∝ λ5 e−3λ . In Section 5.5
we will see that this is the Gam(6, 1/3) density, up to a constant of proportionality.
Therefore c in this example must be the constant that appears in the Gamma density:
c = 1/[5! × (1/3)6 ].
In Figure 2.29 the posterior density is more similar to the prior density than
to the likelihood function. But the analysis deals with only a single data point.
Let’s see what happens as data accumulates. If we have observations y1 , . . . , yn , the
likelihood function becomes
Y
Y e−λ λyi
P
∝ e−nλ λ yi
`(λ) =
p(yi | λ) =
yi !
To see what this means in practical terms, Figure 2.30 shows (a): the same prior
we used in Example 2.15, (b): `(λ) for n = 1, 4, 16, and (c): the posterior for
n = 1, 4, 16, always with ȳ = 3.
1. As n increases the likelihood function becomes increasingly peaked. That’s
because as n increases, the amount of information about λ increases, and
we know λ with increasing accurracy. The likelihood function becomes increasingly peaked around the true value of λ and interval estimates become
increasingly narrow.
2. As n increases the posterior density becomes increasingly peaked and becomes increasingly like `(λ). That’s because as n increases, the amount of
information in the data increases and the likelihood function becomes increasingly peaked. Meanwhile, the prior density remains as it was. Eventually the data contains much more information than the prior, so the likelihood
function becomes much more peaked than the prior and the likelihood dominates. So the posterior, the product of prior and likelihood, looks increasingly
like the likelihood.
Another
way to look at it is through the loglikelihood log `(λ) = c + log p(λ) +
Pn
1 log p(yi | λ). As n → ∞ there is an increasing number of terms in the sum,
so the sum eventually becomes much larger and much more important than
log p(λ).
169
0.5
2.5. BAYESIAN INFERENCE
0.0
0.1
0.2
0.3
0.4
prior
likelihood
posterior
0
1
2
3
4
5
Figure 2.29: Prior, likelihood and posterior densities
for λ in the seedlings example
!
after the single observation y = 3
2.5. BAYESIAN INFERENCE
170
In practice, of course, ȳ usually doesn’t remain constant as n increases. We saw
in Example 1.6 that there were 40 new seedlings in 60 quadrats. With this data
the posterior density is
p(θ | y1 , . . . , y60 ) ∝ λ42 e−62λ
(2.12)
which is the Gam(43, 1/62) density. It is pictured in Figure 2.31. Compare to
Figure 2.29.
Example 2.16 shows Bayesian statistics at work for the Slater School. See
Lavine [1999] for further analysis.
Example 2.16 (Slater School, cont.)
At the time of the analysis reported in Brodeur [1992] there were two other lines of
evidence regarding the effect of power lines on cancer. First, there were some epidemiological studies showing that people who live near power lines or who work as power
line repairmen develop cancer at higher rates than the population at large, though only
slightly higher. And second, chemists and physicists who calculate the size of magnetic
fields induced by power lines (the supposed mechanism for inducing cancer) said that the
small amount of energy in the magnetic fields is insufficient to have any appreciable affect
on the large biological molecules that are involved in cancer genesis. These two lines of
evidence are contradictory. How shall we assess a distribution for θ, the probability that
a teacher hired at Slater School develops cancer?
Recall from page 137 that Neutra, the state epidemiologist, calculated “4.2 cases of
cancer could have been expected to occur” if the cancer rate at Slater were equal to
the national average. Therefore, the national average cancer rate for women of the age
typical of Slater teachers is 4.2/145 ≈ .03. Considering the view of the physicists, our
prior distribution should have a fair bit of mass on values of θ ≈ .03. And considering the
epidemiological studies and the likelihood that effects would have been detected before
1992 if they were strong, our prior distribution should put most of its mass below θ ≈ .06.
For the sake of argument let’s adopt the prior depicted in Figure 2.32. It’s formula is
p(θ) =
Γ(20)Γ(400) 19
θ (1 − θ)399
Γ(420)
(2.13)
which we will see in Section 5.6 is the Be(20, 400) density. The likelihood function
is `(θ) ∝ θ8 (1 − θ)137 (Equation 2.3, Figure 2.20). Therefore the posterior density
p(θ | y) ∝ θ27 (1 − θ)536 which we will see in Section 5.6 is the Be(28, 537) density.
Therefore we can easily write down the constant and get the posterior density
p(θ | y) =
Γ(28)Γ(537) 27
θ (1 − θ)536
Γ(565)
which is also pictured in Figure 2.32.
2.5. BAYESIAN INFERENCE
171
b
0.6
0.0
0.0
0.1
0.2
0.4
likelihood
0.3
0.2
prior
0.4
0.8
0.5
a
0
1
2
3
4
5
!
0
1
2
3
4
5
!
0.6
0.4
n=1
n=4
n = 16
0.0
0.2
posterior
0.8
1.0
c
0
1
2
3
4
5
!
Figure 2.30: a:Prior, b:likelihood and c:posterior densities for λ with n = 1, 4, 16
2.5. BAYESIAN INFERENCE
172
2
0
1
density
3
prior
likelihood
posterior
0.0
0.5
1.0
1.5
2.0
!
Figure 2.31: Prior, likelihood and posterior densities for λ with n = 60,
P
yi = 40.
173
40
2.5. BAYESIAN INFERENCE
0
10
20
30
prior
likelihoo
posterio
0.00
0.05
0.10
0.15
0.20
!
Figure 2.32: Prior, likelihood and posterior density for Slater School
2.6. PREDICTION
174
Examples 2.15 and 2.16 have the convenient feature that the prior density had
the same form — λa e−bλ in one case and θa (1 − θ)b in the other — as the likelihood
function, which made the posterior density and the constant c particularly easy
to calculate. This was not a coincidence. The investigators knew the form of the
likelihood function and looked for a convenient prior of the same form that approximately represented their prior beliefs. This convenience, and whether choosing a prior density for this property is legitimate, are topics which deserve serious
thought but which we shall not take up at this point.
2.6
Prediction
Sometimes the goal of statistical analysis is to make predictions for future observations. Let y1 , . . . , yn , yf be a sample from p(· | θ). We observe y1 , . . . , yn but not yf ,
and want a prediction for yf . There are three common forms that predictions take.
point predictions A point prediction is a single guess for yf . It might be a predictive mean, predictive median, predictive mode, or any other type of point
prediction that seems sensible.
interval predictions An interval prediction or predictive interval, is an interval of
plausible values for yf . A predictive interval is accompanied by a probability. For example, we might say that “The interval (0, 5) is a 90% predictive
interval for yf ” which would mean Pr[yf ∈ (0, 5)] = .90. In a given problem
there are, for two reasons, many predictive intervals. First, there are 90% intervals, 95% intervals, 50% intervals, and so on. And second, there are many
predictive intervals with the same probability. For instance, if (0, 5) is a 90%
predictive interval, then it’s possible that (−1, 4.5) is also a 90% predictive
interval.
predictive distributions A predictive distribution is a probability distribution for
yf . From a predictive distribution, different people could compute point predictions or interval predictions, each according to their needs.
In the real world, we don’t know θ. After all, that’s why we collected data y1 , . . . , yn .
But for now, to clarify the types of predictions listed above, let’s pretend that we
do know θ. Specifically, let’s pretend that we know y1 , . . . , yn , yf ∼ i.i.d. N(−2, 1).
The main thing to note, since we know θ (in this case, the mean and SD of the
Normal distribution), is that y1 , . . . , yn don’t help us at all. That is, they contain no
2.6. PREDICTION
175
information about yf that is not already contained in the knowledge of θ. In other
words, y1 , . . . , yn and yf are conditionally independent given θ. In symbols:
p(yf | θ, y1 , . . . , yn ) = p(yf | θ).
Therefore, our prediction should be based on the knowledge of θ alone, not on any
aspect of y1 , . . . , yn .
A sensible point prediction for yf is ŷf = −2, because -2 is the mean, median,
and mode of the N(−2, 1) distribution. Some sensible 90% prediction intervals
are (−∞, −0.72), (−3.65, −0.36) and (−3.28, ∞). We would choose one or the
other depending on whether we wanted to describe the lowest values that yf might
take, a middle set of values, or the highest values. And, of course, the predictive
distribution of yf is N(−2, 1). It completely describes the extent of our knowledge
and ability to predict yf .
In real problems, though, we don’t know θ. The simplest way to make a prediction consists of two steps. First use y1 , . . . , yn to estimate θ, then make predictions
based on p(yf | θ̂). Predictions made by this method are called plug-in predictions.
In the example of the previous paragraph, if y1 , . . . , yn yielded µ̂ = −2 and σ̂ = 1,
then predictions would be exactly as described above.
For an example with discrete data, refer to Examples 1.4 and 1.6 in which λ is
the arrival rate of new seedlings. We found λ̂ = 2/3. The entire plug-in predictive
distribution is displayed in Figure 2.33. ŷf = 0 is a sensible point prediction.
The set {0, 1, 2} is a 97% plug-in prediction interval or prediction set (because
ppois(2,2/3) ≈ .97); the set {0, 1, 2, 3} is a 99.5% interval.
There are two sources of uncertainty in making predictions. First, because yf is
random, we couldn’t predict it perfectly even if we knew θ. And second, we don’t
know θ. In any given problem, either one of the two might be the more important
source of uncertainty. The first type of uncertainty can’t be eliminated. But in
theory, the second type can be reduced by collecting an increasingly large sample
y1 , . . . , yn so that we know θ with ever more accuracy. Eventually, when we know
θ accurately enough, the second type of uncertainty becomes negligible compared
to the first. In that situation, plug-in predictions do capture almost the full extent
of predictive uncertainty.
But in many practical problems the second type of uncertainty is too large to be
ignored. Plug-in predictive intervals and predictive distributions are too optimistic
because they don’t account for the uncertainty involved in estimating θ. A Bayesian
approach to prediction can account for this uncertainty. The prior distribution of
θ and the conditional distribution of y1 , . . . , yn , yf given θ provide the full joint
distribution of y1 , . . . , yn , yf , θ, which in turn provides the conditional distribution
0.2
0.4
176
0.0
probability
2.6. PREDICTION
0
2
4
6
8
10
Figure 2.33: Plug-in predictive distribution yf ∼ Poi(λ = 2/3) for the seedlings
example
of yf given y1 , . . . , yn . Specifically,
Z
p(yf | y1 , . . . , yn ) = p(yf , θ | y1 , . . . , yn ) dθ
Z
= p(θ | y1 , . . . , yn )p(yf | θ, y1 , . . . , yn ) dθ
Z
= p(θ | y1 , . . . , yn )p(yf | θ) dθ
(2.14)
Equation 2.14 is just the yf marginal density derived from the joint density of
(θ, yf ), all densities being conditional
so far. To say it another
R on the data observed
R
way, the predictive density p(yf ) is p(θ, yf ) dθ = p(θ)p(yf | θ) dθ, but where p(θ)
is really the posterior p(θ | y1 , . . . , yn ). The role of y1 , . . . , yn is to give us the posterior density of θ instead of the prior.
The predictive distribution in Equation 2.14 will be somewhat more dispersed
than the plug-in predictive distribution. If we don’t know much about θ then the
posterior will be widely dispersed and Equation 2.14 will be much more dispersed
than the plug-in predictive distribution. On the other hand, if we know a lot about
θ then the posterior distribution will be tight and Equation 2.14 will be only slightly
2.6. PREDICTION
177
more dispersed than the plug-in predictive distribution.
Example 2.17 (Seedlings, cont.)
Refer to Examples 1.4 and 2.15 about Y , the number of new seedlings emerging each year
in a forest quadrat. Our model is Y ∼ Poi(λ). The prior (page 167) was p(λ) = 4λ2 e−2λ .
Before collecting any data our predictive distribution would be based on that prior. For
any number y we could calculate
Z
pYf (y) ≡ P[Yf = y] = pYf | Λ (y | λ)pΛ (λ) dλ
Z y −λ 3
λ e
2
λ2 e−2λ dλ
=
y! Γ(3)
Z
23
=
λy+2 e−3λ dλ
(2.15)
y!Γ(3)
Z
3y+3
23 Γ(y + 3)
λy+2 e−3λ dλ
=
y!Γ(3)3y+3
Γ(y + 3)
3 y
y+2
2
1
=
,
y
3
3
(We will see in Chapter 5 that this is a Negative Binomial distribution.) Thus for example,
according to our prior,
3
2
8
=
Pr[Yf = 0] =
3
27
3
2 1
8
Pr[Yf = 1] = 3
=
3 3
27
etc.
Figure 2.34 displays these probabilities.
In the first quadrat we found y1 = 3 and the posterior distribution (Example 2.15,
pg. 167)
36
p(λ | y1 = 3) = λ5 e−λ/3 .
5!
So, by calculations similar to Equation 2.15, the predictive distribution after observing
y1 = 3 is
Z
pYf | Y1 (y | y1 = 3) = pYf | Λ (y | λ)pΛ | Y1 (λ | y1 = 3) dλ
6 y
(2.16)
y+5
3
1
=
y
4
4
2.7. HYPOTHESIS TESTING
178
So, for example,
6
3
Pr[Yf = 0 | y1 = 3] =
4
6
3 1
Pr[Yf = 1 | y1 = 3] = 6
4 4
etc.
Figure 2.34 displays these probabilities.
Finally, when we collected data from 60 quadrats, we found
6243 42 −62λ
p(λ | y1 , . . . , y60 ) =
λ e
42!
(2.17)
Therefore , by calculations similar to Equation 2.15, the predictive distribution is
6 y
y + 42
62
1
Pr[Yf = y | y1 , . . . , y60 ] =
y
63
63
(2.18)
Figure 2.34 displays these probabilities.
A priori, and after only n = 1 observation, λ is not know very precisely; both types of
uncertainty are important; and the Bayesian predictive distribution is noticably different
from the plug-in predictive distribution. But after n = 60 observations λ is known fairly
well; the second type of uncertainty is negligible; and the Bayesian predictive distribution
is very similar to the plug-in predictive distribution.
2.7
Hypothesis Testing
Scientific inquiry often takes the form of hypothesis testing. In each instance there
are two hypotheses — the null hypothesis H0 and the alternative hypothesis Ha .
medicine
• H0 : the new drug and the old drug are equally effective.
• Ha : the new drug is better than the old.
public health
• H0 exposure to high voltage electric lines is benign.
179
0.5
2.7. HYPOTHESIS TESTING
0.0
0.1
0.2
0.3
0.4
n=0
n=1
n=60
plug!in
0
2
4
6
8
10
y
Figure 2.34: Predictive distributions of yf in the seedlings example after samples
of size n = 0, 1, 60, and the plug-in predictive
2.7. HYPOTHESIS TESTING
180
• Ha exposure to high voltage electric lines promotes cancer.
public policy
• H0 : Head Start has no effect.
• Ha : Head Start is beneficial.
astronomy
• H0 : The sun revolves around the Earth.
• Ha : The Earth revolves around the sun.
physics
• H0 : Newtonian mechanics holds.
• Ha : Relativity holds.
public trust
• H0 : Winning lottery numbers are random.
• Ha : Winning lottery numbers have patterns.
ESP
• H0 : There is no ESP.
• Ha : There is ESP.
ecology
• H0 : Forest fires are irrelevant to forest diversity.
• Ha : Forest fires enhance forest diversity.
By tradition H0 is the hypothesis that says nothing interesting is going on or the
current theory is correct, while Ha says that something unexpected is happening or
our current theories need updating. Often the investigator is hoping to disprove
the null hypothesis and to suggest the alternative hypothesis in its place.
It is worth noting that while the two hypotheses are logically exclusive, they
are not logically exhaustive. For instance, it’s logically possible that forest fires
decrease diversity even though that possibility is not included in either hypothesis.
So one could write Ha : Forest fires decrease forest diversity, or even Ha : Forest fires
2.7. HYPOTHESIS TESTING
181
change forest diversity. Which alternative hypothesis is chosen makes little difference for the theory of hypothesis testing, though it might make a large difference
to ecologists.
Statisticians have developed several methods called hypothesis tests. We focus
on just one for the moment, useful when H0 is specific. The fundamental idea is
to see whether the data are “compatible” with the specific H0 . If so, then there
is no reason to doubt H0 ; if not, then there is reason to doubt H0 and possibly to
consider Ha in its stead. The meaning of “compatible” can change from problem to
problem but typically there is a four step process.
1. Formulate a scientific null hypothesis and translate it into statistical terms.
2. Choose a low dimensional statistic, say w = w(y1 , . . . , yn ) such that the distribution of w is specified under H0 and likely to be different under Ha .
3. Calculate, or at least approximate, the distribution of w under H0 .
4. Check whether the observed value of w, calculated from y1 , . . . , yn , is compatible with its distribution under H0 .
How would this work in the examples listed at the beginning of the chapter?
What follows is a very brief description of how hypothesis tests might be carried
out in some of those examples. To focus on the key elements of hypothesis testing,
the descriptions have been kept overly simplistic. In practice, we would have to
worry about confounding factors, the difficulties of random sampling, and many
other issues.
public health Sample a large number of people with high exposure to power lines.
For each person, record Xi , a Bernoulli random variable indicating whether
that person has cancer. Model X1 , . . . , Xn ∼ i.i.d. Bern(θ1 ). Repeat for a sample of people with low exposure; getting Y1 , . . . , Yn ∼ i.i.d. Bern(θ2 ). Estimate
θ1 and θ2 . Let w = θ̂1 − θ̂2 . H0 says E[w] = 0. Either the Binomial distribution
or the Central Limit Theorem tells us the SD’s of θ̂1 and θ̂2 , and hence the SD
of w. Ask How many SD’s is w away from its expected value of 0. If it’s off by
many SD’s, more than about 2 or 3, that’s evidence against H0 .
public policy Test a sample children who have been through Head Start. Model
their test scores as X1 , . . . , Xn ∼ i.i.d. N(µ1 , σ1 ). Do the same for children
who have not been through Head Start, getting Y1 , . . . , Yn ∼ i.i.d. N(µ2 , σ2 ).
H0 says µ1 = µ2 . Let w = µ̂1 − µ̂2 . The parameters µ1 , µ2 , σ1 , σ2 can all be
estimated from the data; therefore w can be calculated and its SD estimated.
2.7. HYPOTHESIS TESTING
182
Ask How many SD’s is w away from its expected value of 0. If it’s off by many
SD’s, more than about 2 or 3, that’s evidence against H0 .
ecology We could either do an observational study, beginning with one sample of
plots that had had frequent forest fires in the past and another sample that
had had few fires. Or we could do an experimental study, beginning with a
large collection of plots and subjecting half to a regime of regular burning and
the other half to a regime of no burning. In either case we would measure
and compare species diversity in both sets of plots. If diversity is similar
in both groups, there is no reason to doubt H0 . But if diversity is sufficiently
different (Sufficient means large compared to what is expected by chance under
H0 .) that would be evidence against H0 .
To illustrate in more detail, let’s consider testing a new blood pressure medication. The scientific null hypothesis is that the new medication is not any more
effective than the old. We’ll consider two ways a study might be conducted and see
how to test the hypothesis both ways.
M ETHOD 1 A large number of patients are enrolled in a study and their blood
pressures are measured. Half are randomly chosen to receive the new medication
(treatment); half receive the old (control). After a prespecified amount of time,
their blood pressure is remeasured. Let YC,i be the change in blood pressure from
the beginning to the end of the experiment for the i’th control patient and YT,i be
the change in blood pressure from the beginning to the end of the experiment for
the i’th treatment patient. The model is
YC,1 , . . . YC,n ∼ i.i.d. fC ;
YT,1 , . . . YT,n ∼ i.i.d. fT ;
E[YC,i ] = µC ;
E[YT,i ] = µT ;
Var(YC,i ) = σC2
Var(YT,i ) = σT2
for some unknown means µC and µT and variances σC and σT . The translation of
the hypotheses into statistical terms is
H0 : µ T = µ C
Ha : µT 6= µC
Because we’re testing a difference in means, let w = ȲT − ȲC . If the sample size n is
reasonably large, then the Central Limit Theorem says approximately w ∼ N(0, σw2 )
under H0 with σw2 = (σT2 + σC2 )/n. The mean of 0 comes from H0 . The variance
σw2 comes from adding variances of independent random variables. σT2 and σC2 and
therefore σw2 can be estimated from the data. So we can calculate w from the data
2.7. HYPOTHESIS TESTING
183
and see whether it is within about 2 or 3 SD’s of where H0 says it should be. If it
isn’t, that’s evidence against H0 .
M ETHOD 2 A large number of patients are enrolled in a study and their blood
pressure is measured. They are matched together in pairs according to relevant
medical characteristics. The two patients in a pair are chosen to be as similar to
each other as possible. In each pair, one patient is randomly chosen to receive the
new medication (treatment); the other receives the old (control). After a prespecified amount of time their blood pressures are measured again. Let YT,i and YC,i be
the change in blood pressure for the i’th treatment and i’th control patients. The
researcher records
(
1 if YT,i > YC,i
Xi =
0 otherwise
The model is
X1 , . . . , Xn ∼ i.i.d. Bern(p)
for some unknown probability p. The translation of the hypotheses into statistical
terms is
H0 : p = .5
Ha : p 6= .5
P
Let w =
Xi . Under H0 , w ∼ Bin(n, .5). To test H0 we plot the Bin(n, .5) distribution and see where w falls on the plot . Figure 2.35 shows the plot for n = 100. If
w turned out to be between about 40 and 60, then there would be little reason to
doubt H0 . But on the other hand, if w turned out to be less than 40 or greater than
60, then we would begin to doubt. The larger |w − 50|, the greater the cause for
doubt.
This blood pressure example exhibits a feature common to many hypothesis
tests. First, we’re testing a difference in means. I.e., H0 and Ha disagree about a
mean, in this case the mean change in blood pressure from the beginning to the
end of the experiment. So we take w to be the difference in sample means. Second,
since the experiment is run on a large number of people, the Central Limit Theorem
says that w will be approximately Normally distributed. Third, we can calculate or
estimate the mean µ0 and SD σ0 under H0 . So fourth, we can compare the value of
w from the data to what H0 says its distribution should be.
In Method 1 above, that’s just what we did. In Method 2 above, we didn’t
use the Normal approximation; we used the Binomial distribution. But we could
have used the approximation. From facts about the Binomial distribution we know
184
0.00
0.04
0.08
2.7. HYPOTHESIS TESTING
30
40
50
60
70
w
Figure 2.35: pdf of the Bin(100, .5) distribution
√
µ0 = n/2 and σ0 = n/2 under H0 . For n = 100, Figure 2.36 compares the exact
Binomial distribution to the Normal approximation.
In general, when the Normal approximation is valid, we compare w to the
N(µ0 , σ0 ) density, where µ0 is calculated according to H0 and σ0 is either calculated
according to H0 or estimated from the data. If t ≡ |w − µ0 |/σ0 is bigger than about
2 or 3, that’s evidence against H0 .
The following example shows hypothesis testing at work.
Example 2.18 (Tooth Growth, continued)
This continues Example 2.1 (pg. 100). Let’s concentrate on a particular dosage, say
dose = 0.5, and test the null hypothesis that, on average, the delivery method (supp)
makes no difference to tooth growth, as opposed to the alternative that it does make
a difference. Those are the scientific hypotheses. The data for testing the hypothesis
are x1 , . . . , x10 , the 10 recordings of growth when supp = VC and y1 , . . . , y10 , the 10
recordings of growth when supp = OJ. The xi ’s are 10 independent draws from one
distribution; the yi ’s are 10 independent draws from another:
x1 , . . . , x10 ∼ i.i.d. fVC
y1 , . . . , y10 ∼ i.i.d. fOJ
185
0.00
0.04
0.08
2.7. HYPOTHESIS TESTING
30
40
50
60
70
w
Figure 2.36: pdfs of the Bin(100, .5) (dots) and N(50, 5) (line) distributions
Define the two means to be µVC ≡ E[xi ] and µOJ ≡ E[yi ]. The scientific hypothesis and
its alternative, translated into statistical terms become
H0 : µVC = µOJ
Ha : µVC 6= µOJ
Those are the hypotheses in statistical terms.
Because we’re testing a difference in means, we choose our one dimensional summary
statistic to be w = |x̄ − ȳ|. Small values of w support H0 ; large values support Ha . But
how small is small; how large is large? The Central Limit Theorem says
σVC
x̄ ∼ N µVC , √
n
σOJ
ȳ ∼ N µOJ , √
n
2.7. HYPOTHESIS TESTING
186
approximately, so that under H0 ,
r
w ∼ N 0,
2
2
σVC
+ σOJ
n
!
,
0.00
0.15
approximately. The statistic w can be calculated, its SD estimated, and its approximate
density plotted as in Figure 2.37. We can see from the Figure, or from the fact that
t/σt ≈ 3.2 that the observed value of t is moderately far from its expected value under
H0 . The data provide moderately strong evidence against H0 .
!6
!4
!2
0
2
4
6
Figure 2.37: Approximate density of summary statistic t. The black dot is the value
of t observed in the data.
Figure 2.37 was produced with the following R code.
x <- ToothGrowth$len[
ToothGrowth$supp=="VC"
& ToothGrowth$dose==0.5 ]
y <- ToothGrowth$len[
ToothGrowth$supp=="OJ"
& ToothGrowth$dose==0.5 ]
t <- abs ( mean(x) - mean(y) )
sd <- sqrt ( ( var(x) + var(y) )/length(x) )
2.7. HYPOTHESIS TESTING
187
tvals <- seq ( -4*sd, 4*sd, len=80 )
plot ( tvals, dnorm(tvals,0,sd), type="l",
xlab="", ylab="", main="" )
points ( t, 0, pch=16, cex=1.5 )
The points(...) adds the observed value of t to the plot.
In the next example it is difficult to estimate the distribution of w under H0 ; so
we use simulation to work it out.
Example 2.19 (Baboons)
Because baboons are promiscuous, when a baby is born it is not obvious, at least to
humans, who the father is. But do the baboons themselves know who the father is?
Buchan et al. [2003] report a study of baboon behavior that attempts to answer that
question. For more information see http://www.princeton.edu/~baboon. Baboons
live in social groups comprised of several adult males, several adult females, and juveniles.
Researchers followed several groups of baboons periodically over a period of several years
to learn about baboon behavior. The particular aspect of behavior that concerns us here
is that adult males sometimes come to the aid of juveniles. If adult males know which
juveniles are their own children, then it’s at least possible that they tend to aid their own
children more than other juveniles. The data set baboons (available on the web site)1
contains data on all the recorded instances of adult males helping juveniles. The first
four lines of the file look like this.
Recip Father Maleally Dadpresent Group
ABB
EDW
EDW
Y
OMO
ABB
EDW
EDW
Y
OMO
ABB
EDW
EDW
Y
OMO
ABB
EDW
POW
Y
OMO
1. Recip identifies the juvenile who received help. In the four lines shown here, it is
always ABB.
2. Father identifes the father of the juvenile. Researchers know the father through
DNA testing of fecal samples. In the four lines shown here, it is always EDW.
1
We have slightly modified the data to avoid some irrelevant complications.
2.7. HYPOTHESIS TESTING
188
3. Maleally identifies the adult male who helped the juvenile. In the fourth line we
see that POW aided ABB who is not his own child.
4. Dadpresent tells whether the father was present in the group when the juvenile
was aided. In this data set it is always Y.
5. Group identifies the social group in which the incident occured. In the four lines
shown here, it is always OMO.
Let w be the number of cases in which a father helps his own child. The snippet
dim ( baboons )
sum ( baboons$Father == baboons$Maleally )
reveals that there are n = 147 cases in the data set, and that w = 87 are cases in which
a father helps his own child. The next step is to work out the distribution of w under
H0 : adult male baboons do not know which juveniles are their children.
Let’s examine one group more closely, say the OMO group. Typing
baboons[baboons$Group == "OMO",]
displays the relevant records. There are 13 of them. EDW was the father in 9, POW
was the father in 4. EDW provided the help in 9, POW in 4. The father was the ally
in 9 cases; in 4 he was not. H0 implies that EDW and POW would distribute their help
randomly among the 13 cases. If H0 is true, i.e., if EDW distributes his 9 helps and POW
distributes his 4 helps randomly among the 13 cases, what would be the distribution of
W , the number of times a father helps his own child? We can answer that question
by a simulation in R. (We could also answer it by doing some math or by knowing the
hypergeometric distribution, but that’s not covered in this text.)
dads <- baboons$Father [ baboons$Group == "OMO" ]
ally <- baboons$Maleally [ baboons$Group == "OMO" ]
N.sim <- 1000
w <- rep ( NA, N.sim )
for ( i in 1:N.sim ) {
perm <- sample ( dads )
w[i] <- sum ( perm == ally )
}
hist(w)
table(w)
2.7. HYPOTHESIS TESTING
189
Try out the simulation for yourself. It shows that the observed number in the data,
w = 9, is not so unusual under H0 .
What about the other social groups? If we find out how many there are, we can do
a similar simulation for each. Let’s write an R function to help.
g.sim <- function (group, N.sim) {
dads <- baboons$Father [ baboons$Group == group ]
ally <- baboons$Maleally [ baboons$Group == group ]
w <- rep ( NA, N.sim )
for ( i in 1:N.sim ) {
perm <- sample ( dads )
w[i] <- sum ( perm == ally )
}
return(w)
}
Figure 2.38 shows histograms of g.sim for each group, along with a dot showing the
observed value of w in the data set. For some of the groups the observed value of w,
though a bit on the high side, might be considered consistent with H0 . For others, the
observed value of w falls outside the range of what might be reasonably expected by
chance. In a case like this, where some of the evidence is strongly against H0 and some
is only weakly against H0 , an inexperienced statistician might believe the overall case
against H0 is not very strong. But that’s not true. In fact, every one of the groups
contributes a little evidence against H0 , and the total evidence against H0 is very strong.
To see this, we can combine the separate simulations into one. The following snippet of
code does this. Each male’s help is randomly reassigned to a juvenile within his group.
The number of times when a father helps his own child is summed over the different
groups. Simulated numbers are shown in the histogram in Figure 2.39. The dot in the
figure is at 84, the actual number of instances in the full data set. Figure 2.39 suggests
that it is almost impossible that the 84 instances arose by chance, as H0 would suggest.
We should reject H0 and reach the conclusion that (a) adult male baboons do know who
their own children are, and (b) they give help preferentially to their own children.
Figure 2.38 was produced with the following snippet.
groups <- unique ( baboons$Group )
n.groups <- length(groups)
par ( mfrow=c(3,2) )
2.7. HYPOTHESIS TESTING
190
VIV
0
0
200
200
400
400
OMO
6
7
8
9
10 11
8
10
12
w
w
NYA
WEA
14
16
0
0
100
100
200
200
300
300
5
0
1
2
3
4
w
5
15
20
25
30
w
0
50
100 150
LIN
8
10
14
18
w
Figure 2.38: Number of times baboon father helps own child in Example 2.19.
Histograms are simulated according to H0 . Dots are observed data.
2.7. HYPOTHESIS TESTING
191
0
100
200
for ( i in 1:n.groups ) {
good <- baboons$Group == groups[i]
w.obs <- sum (
baboons$Father[good]
== baboons$Maleally[good] )
w.sim <- g.sim ( groups[i], N.sim )
hist ( w.sim, xlab="w", ylab="", main=groups[i],
xlim=range(c(w.obs,w.sim)) )
points ( w.obs, 0, pch=16, cex=1.5 )
print ( w.obs )
}
50
60
70
80
w.tot
Figure 2.39: Histogram of simulated values of w.tot. The dot is the value observed
in the baboon data set.
Figure 2.39 was produced with the following snippet.
w.obs <- rep ( NA, n.groups )
w.sim <- matrix ( NA, n.groups, N.sim )
2.8. EXERCISES
192
for ( i in 1:n.groups ) {
good <- baboons$Group == groups[i]
w.obs[i] <- sum (
baboons$Father[good]
== baboons$Maleally[good] )
w.sim[i,] <- g.sim ( groups[i], N.sim )
}
w.obs.tot <- sum ( w.obs )
w.sim.tot <- apply ( w.sim, 2, sum )
hist ( w.sim.tot, xlab="w.tot", ylab="",
xlim=range(c(w.obs.tot,w.sim.tot)) )
points ( w.obs.tot, 0, pch=16, cex=1.5 )
print ( w.obs.tot )
2.8
Exercises
1. (a) Justify Equation 2.1 on page 106.
(b) Show that the function g(x) defined just after Equation 2.1 is a probability density. I.e., show that it integrates to 1.
2. This exercise uses the ToothGrowth data from Examples 2.1 and 2.18.
(a) Estimate the effect of delivery mode for doses 1.0 and 2.0. Does it seem
that delivery mode has a different effect at different doses?
(b) Does it seem as though delivery mode changes the effect of dose?
(c) For each delivery mode, make a set of three boxplots to compare the
three doses.
3. This exercise uses data from 272 eruptions of the Old Faithful geyser in Yellowstone National Park. The data are in the R dataset faithful. One column
contains the duration of each eruption; the other contains the waiting time
to the next eruption.
(a) Plot eruption versus waiting. Is there a pattern? What is going on?
(b) Try ts.plot(faithful$eruptions[1:50]). Try other sets of eruptions,
say ts.plot(faithful$eruptions[51:100]). (There is nothing magic
2.8. EXERCISES
193
about 50, but if you plot all 272 eruptions then the pattern might be
harder to see. Choose any convenient number that lets you see what’s
going on.) What is going on?
4. This exercise relies on data from the neurobiology experiment described in
Example 2.6.
(a) Download the data from the book’s website.
(b) Reproduce Figure 2.17.
(c) Make a plot similar to Figure 2.17 but for a different neuron and different tastant.
(d) Write an R function that accepts a neuron and tastant as input and produces a plot like Figure 2.17.
(e) Use the function from the previous part to look for neurons that respond
to particular tastants. Describe your results.
5. This exercise relies on Example 2.8 about the Slater school. There were 8 cancers among 145 teachers. Figure 2.20 shows the likelihood function. Suppose
the same incidence rate had been found among more teachers. How would
that affect `(θ)? Make a plot similar to Figure 2.20, but pretending that there
had been 80 cancers among 1450 teachers. Compare to Figure 2.20. What is
the result? Does it make sense? Try other numbers if it helps you see what is
going on.
6. This exercise continues Exercise 35 in Chapter 1. Let p be the fraction of the
population that uses illegal drugs.
(a) Suppose researchers know that p ≈ .1. Jane and John are given the
randomized response question. Jane answers “yes”; John answers “no”.
Find the posterior probability that Jane uses cocaine; find the posterior
probability that John uses cocaine.
(b) Now suppose that p is not known and the researchers give the randomized response question to 100 people. Let X be the number who answer
“yes”. What is the likelihood function?
(c) What is the mle of p if X=50, if X=60, if X=70, if X=80, if X=90?
7. This exercise deals with the likelihood function for Poisson distributions.
(a) Let x1 , . . . , xn ∼ i.i.d. Poi(λ). Find `(λ) in terms of x1 , . . . , xn .
2.8. EXERCISES
194
(b) Show that `(λ) depends only on
the individual xi ’s.
P
xi and not on the specific values of
(c) Let y1 , . . . , yn be a sample from Poi(λ). Show that λ̂ = ȳ is the m.l.e.
(d) Find the m.l.e. in Example 1.4.
8. The book Data Andrews and Herzberg [1985] contains lots of data sets that
have been used for various purposes in statistics. One famous data set records
the annual number of deaths by horsekicks in the Prussian Army from 18751894 for each of 14 corps. Download the data from statlib at http://lib.
stat.cmu.edu/datasets/Andrews/T04.1. (It is Table 4.1 in the book.) Let
Yij be the number of deaths in year i, corps j, for i = 1875, . . . , 1894 and
j = 1, . . . , 14. The Yij s are in columns 5–18 of the table.
(a) What are the first four columns of the table?
(b) What is the last column of the table?
(c) What is a good model for the data?
(d) Suppose you model the data as i.i.d. Poi(λ). (Yes, that’s a good answer
to the previous question.)
i. Plot the likelihood function for λ.
ii. Find λ̂.
iii. What can you say about the rate of death by horsekick in the Prussian calvary at the end of the 19th century?
(e) Is there any evidence that different corps had different death rates? How
would you investigate that possibility?
9. Use the data from Example 2.8. Find the m.l.e. for θ.
10. X1 , . . . , Xn ∼ Normal(µ, 1). Multiple choice: The m.l.e. µ̂ is found from the
equation
(a)
d d
f (x1 , . . . , xn |µ)
dµ dx
(b)
d
f (x1 , . . . , xn |µ)
dµ
=0
(c)
d
f (x1 , . . . , xn |µ)
dx
=0
=0
11. This exercise deals with the likelihood function for Normal distributions.
(a) Let y1 , . . . , yn ∼ i.i.d. N(µ, 1). Find `(µ) in terms of y1 , . . . , yn .
2.8. EXERCISES
(b) Show that `(µ) depends only on
the individual yi ’s.
195
P
yi and not on the specific values of
(c) Let n = 10 and choose a value for µ. Use R to generate a sample of size
10 from N(µ, 1). Plot the likelihood function. How accurately can you
estimate µ from a sample of size 10?
(d) Let y1 , . . . , y10 ∼ i.i.d. N(µ, σ) where σ is known but not necessarily equal
to 1. Find `(µ) in terms of y1 , . . . , y10 and σ.
(e) Let y1 , . . . , y10 ∼ i.i.d. N(µ, σ) where µ is known but σ is unknown. Find
`(σ) in terms of y1 , . . . , y10 and µ.
12. Let y1 , . . . , yn be a sample from N(µ, 1). Show that µ̂ = ȳ is the m.l.e.
2
13. Let yP
1 , . . . , yn be a sample from N(µ, σ) where µ is known. Show that σ̂ =
n−1 (yi − µ)2 is the m.l.e.
14. Recall the discoveries data from page 10 on the number of great discoveries
each year. Let Yi be the number of great discoveries in year i and suppose
Yi ∼ Poi(λ). Plot the likelihood function `(λ). Figure 1.3 suggested that
λ ≈ 3.1 explained the data reasonably well. How sure can we be about the
3.1?
15. Justify each step of Equation 2.6.
16. Page 159 discusses a simulation experiment comparing the sample mean and
sample median as estimators of a population mean. Figure 2.27 shows the
results of the simulation experiment. Notice that the vertical scale decreases
from panel (a) to (b), to (c), to (d). Why? Give a precise mathematical
formula for the amount by which the vertical scale should decrease. Does the
actual decrease agree with your formula?
17. In the medical screening example on page 165, find the probability that the
patient has the disease given that the test is negative.
18. A drug testing example
19. Country A suspects country B of having hidden chemical weapons. Based on
secret information from their intelligence agency they calculate
P[B has weapons] = .8. But then country B agrees to inspections, so A sends
inspectors. If there are no weapons then of course the inspectors won’t find
2.8. EXERCISES
196
any. But if there are weapons then they will be well hidden, with only a 20%
chance of being found. I.e.,
P[finding weapons|weapons exist] = .2.
(2.19)
No weapons are found. Find the probability that B has weapons. I.e., find
Pr[B has weapons|no weapons are found].
20. Let T be the amount of time a customer spends on Hold when calling the
computer help line. Assume that T ∼ exp(λ) where λ is unknown. A sample
of n calls is randomly selected. Let t1 , . . . , tn be the times spent on Hold.
(a) Choose a value of λ for doing simulations.
(b) Use R to simulate a sample of size n = 10.
(c) Plot `(λ) and find λ̂.
(d) About how accurately can you determine λ?
P
(e) Show that `(λ) depends only on
ti and not on the values of the individual ti ’s.
21. There are two coins. One is fair; the other is two-headed. You randomly
choose a coin and toss it.
(a) What is the probability the coin lands Heads?
(b) What is the probability the coin is two-headed given that it landed
Heads?
(c) What is the probability the coin is two-headed given that it landed Tails?
Give a formal proof, not intuition.
(d) You are about to toss the coin a second time. What is the probability
that the second toss lands Heads given that the first toss landed Heads?
22. There are two coins. For coin A, P[H] = 1/4; for coin B, P[H] = 2/3. You
randomly choose a coin and toss it.
(a) What is the probability the coin lands Heads?
(b) What is the probability the coin is A given that it landed Heads? What
is the probability the coin is A given that it landed Tails?
2.8. EXERCISES
197
(c) You are about to toss the coin a second time. What is the probability the
second toss lands Heads given that the first toss landed Heads?
23. At Dupont College (apologies to Tom Wolfe) Math SAT scores among math
majors are distributed N(700, 50) while Math SAT scores among non-math
majors are distributed N(600, 50). 5% of the students are math majors. A
randomly chosen student has a math SAT score of 720. Find the probability
that the student is a math major.
24. The Great Randi is a professed psychic and claims to know the outcome of
coin flips. This problem concerns a sequence of 20 coin flips that Randi will
try to guess (or not guess, if his claim is correct).
(a) Take the prior P[Randi is psychic] = .01.
i. Before any guesses have been observed, find
P[first guess is correct] and P[first guess is incorrect].
ii. After observing 10 consecutive correct guesses, find the updated
P[Randi is psychic].
iii. After observing 10 consecutive correct guesses, find
P[next guess is correct] and P[next guess is incorrect].
iv. After observing 20 consecutive correct guesses, find
P[next guess is correct] and P[next guess is incorrect].
(b) Two statistics students, a skeptic and a believer discuss Randi after class.
Believer: I believe her, I think she’s psychic.
Skeptic: I doubt it. I think she’s a hoax.
Believer: How could you be convinced? What if Randi guessed 10 in a
row? What would you say then?
Skeptic: I would put that down to luck. But if she guessed 20 in a row then
I would say P[Randi can guess coin flips] ≈ .5.
Find the skeptic’s prior probability that Randi can guess coin flips.
(c) Suppose that Randi doesn’t claim to guess coin tosses perfectly, only that
she can guess them at better than 50%. 100 trials are conducted. Randi
gets 60 correct. Write down H0 and Ha appropriate for testing Randi’s
claim. Do the data support the claim? What if 70 were correct? Would
that support the claim?
(d) The Great Sandi, a statistician, writes the following R code to calculate
a probability for Randi.
2.8. EXERCISES
198
y <- rbinom ( 500, 100, .5)
sum ( y == 60 ) / 500
What is Sandi trying to calculate? Write a formula (Don’t evaluate it.)
for the quantity Sandi is trying to calculate.
25. Let w be the fraction of free throws that Shaquille O’Neal (or any other player
of your choosing) makes during the next NBA season. Find a density that
approximately represents your prior opinion for w.
26. Let t be the amount of time between the moment when the sun first touches
the horizon in the afternoon and the moment when it sinks completely below
the horizon. Without making any observations, assess your distribution for t.
27. Assess your prior distribution for b, the proportion of M&M’s that are brown.
Buy as many M&M’s as you like and count the number of browns. Calculate
your posterior distribution.
28. (a) Let y ∼ N(θ, 1) and let the prior distribution for θ be θ ∼ N(0, 1).
i. When y has been observed, what is the posterior density of θ?
ii. Show that the density in part i. is a Normal density.
iii. Find its mean and SD.
(b) Let y ∼ N(θ, σy ) and let the prior distribution for θ be θ ∼ N(m, σ).
Suppose that σy , m, and σ are known constants.
i. When y has been observed, what is the posterior density of θ?
ii. Show that the density in part i. is a Normal density.
iii. Find its mean and SD.
(c) Let y1 , . . . , yn be a sample of size n from N(θ, σy ) and let the prior distribution for θ be θ ∼ N(m, σ). Suppose that σy , m, and σ are known
constants.
i. When y1 , . . . , yn have been observed, what is the posterior density
of θ?
ii. Show that the density in part i. is a Normal density.
iii. Find its mean and SD.
(d) An example with data.
29. Verify Equations 2.16, 2.17, and 2.18.
2.8. EXERCISES
199
30. Refer to the discussion of predictive intervals on page 175. Justify the claim
that (−∞, −.72), (−3.65, −0.36), and (−3.28, ∞) are 90% prediction intervals. Find the corresponding 80% prediction intervals.
31. (a) Following Example 2.17 (pg. 177), find Pr[yf = k | y1 , . . . yn ] for k =
1, 2, 3, 4.
(b) Using the results from part (a), make a plot analagous to Figure 2.33
(pg. 176).
32. Suppose you want to test whether the random number generator in R generates each of the digits 0, 1, . . . , 9 with probability 0.1. How could you do it?
You may consider first testing whether R generates 0 with the right frequency,
then repeating the analysis for each digit.
33. (a) Repeat the analysis of Example 2.18 (pg. 184), but for dose = 1 and
dose = 2.
(b) Test the hypothesis that increasing the dose from 1 to 2 makes no difference in tooth growth.
(c) Test the hypothesis that the effect of increasing the dose from 1 to 2 is
the same for supp = VC as it is for supp = OJ.
(d) Do the answers to parts (a), (b) and (c) agree with your subjective assessment of Figures 2.2, 2.3, and 2.6?
34. Continue Exercise 36 from Chapter 1. The autoganzfeld trials resulted in
X = 122.
(a) What is the parameter in this problem?
(b) Plot the likelihood function.
(c) Test the “no ESP, no cheating” hypothesis.
(d) Adopt and plot a reasonable and mathematically tractable prior distribution for the parameter. Compute and plot the posterior distribution.
(e) Find the probability of a match on the next trial given X = 122.
(f) What do you conclude?
35. Three biologists named Asiago, Brie, and Cheshire are studying a mutation
in morning glories, a species of flowering plant. The mutation causes the
flowers to be white rather than colored. But it is not known whether the
2.8. EXERCISES
200
mutation has any effect on the plants’ fitness. To study the question, each
biologist takes a random sample of morning glories having the mutation,
counts the seeds that each plant produces, and calculates a likelihood set for
the average number of seeds produced by mutated morning glories.
Asiago takes a sample of size nA = 100 and calculates a LS.1 set. Brie takes a
sample of size nB = 400 and calculates a LS.1 set. Cheshire takes a sample of
size nC = 100 and calculates a LS.2 set.
(a) Who will get the longer interval, Asiago or Brie? About how much longer
will it be? Explain.
(b) Who will get the longer interval, Asiago or Cheshire? About how much
longer will it be? Explain.
36. In the 1990’s, a committee at MIT wrote A Study on the Status of Women
Faculty in Science at MIT. In 1994 there were 15 women among the 209
tenured women in the six departments of the School of Science. They found,
among other things, that the amount of resources (money, lab space, etc.)
given to women was, on average, less than the amount given to men. The
report goes on to pose the question: Given the tiny number of women faculty
in any department one might ask if it is possible to obtain significant data to
support a claim of gender differences . . . .
What does statistics say about it? Focus on a single resource, say laboratory
space. The distribution of lab space is likely to be skewed. I.e., there will
be a few people with lots more space than most others. So let’s model the
distribution of lab space with an Exponential distribution. Let x1 , . . . , x15 be
the amounts of space given to tenured women, so xi ∼ Exp(λw ) for some
unknown parameter λw . Let M be the average lab space given to tenured
men. Assume that M is known to be 100, from the large number of tenured
men. If there is no discrimination, then λw = 100. (λw is E(xi ).)
Chris Stats writes the following R code.
y <- rexp(15,.01)
m <- mean(y)
s <- sqrt( var(y ) / 15)
lo <- m - 2*s
hi <- m + 2*s
2.8. EXERCISES
201
What is y supposed to represent? What is (lo,hi) supposed to represent?
Now Chris puts the code in a loop.
n <- 0
for ( i in 1:1000 ) {
y <- rexp(15,.01)
m <- mean(y)
s <- sqrt ( var(y ))
lo <- m - 2*s
hi <- m + 2*s
if ( lo < 100 & hi > 100 ) n <- n+1
}
print (n/1000)
What is n/1000 supposed to represent? If a sample size of 15 is sufficiently
large for the Central Limit Theorem to apply, then what, approximately, is the
value of n/1000?
37. Refer to the R code in Example 2.1 (pg. 100). Why was it necessary to have
a brace (“{”) after the line
for ( j in 1:3 )
but not after the line
for ( i in 1:2 )?
C HAPTER 3
R EGRESSION
3.1
Introduction
Regression is the study of how the distribution of one variable, Y , changes according to the value of another variable, X. R comes with many data sets that offer
regression examples. Four are shown in Figure 3.1.
1. The data set attenu contains data on several variables from 182 earthquakes,
including hypocenter-to-station distance and peak acceleration. Figure 3.1 (a)
shows acceleration plotted against distance. There is a clear relationship between X = distance and the distribution of Y = acceleration. When X is
small, the distribution of Y has a long right-hand tail. But when X is large,
Y is always small.
2. The data set airquality contains data about air quality in New York City.
Ozone levels Y are plotted against temperature X in Figure 3.1 (b). When X
is small then the distribution of Y is concentrated on values below about 50
or so. But when X is large, Y can range up to about 150 or so.
3. Figure 3.1 (c) shows data from mtcars. Weight is on the abcissa and the type
of transmission (manual=1, automatic=0) is on the ordinate. The distribution of weight is clearly different for cars with automatic transmissions than
for cars with manual transmissions.
4. The data set faithful contains data about eruptions of the Old Faithful
geyser in Yellowstone National Park. Figure 3.1 (d) shows Y = time to next eruption
plotted against X = duration of current eruption. Small values of X tend to
indicate small values of Y .
202
3.1. INTRODUCTION
203
(b)
150
50
0
100
300
60 70 80 90
Distance
temperature
(c)
(d)
0
70
50
60
waiting
80
1
90
0
Manual Transmission
100
ozone
0.6
0.4
0.2
0.0
Acceleration
0.8
(a)
2
3
4
Weight
5
1.5 2.5 3.5 4.5
eruptions
Figure 3.1: Four regression examples
3.1. INTRODUCTION
204
Figure 3.1 was produced by the following R snippet.
par ( mfrow=c(2,2) )
data ( attenu )
plot ( attenu$dist, attenu$accel, xlab="Distance",
ylab="Acceleration", main="(a)", pch="." )
data ( airquality )
plot ( airquality$Temp, airquality$Ozone, xlab="temperature",
ylab="ozone", main="(b)", pch="." )
data ( mtcars )
stripchart ( mtcars$wt ~ mtcars$am, pch=1, xlab="Weight",
method="jitter", ylab="Manual Transmission",
main="(c)" )
data ( faithful )
plot ( faithful, pch=".", main="(d)" )
Both continuous and discrete variables can turn up in regression problems. In
the attenu, airquality and faithful datasets, both X and Y are continuous. In
mtcars, it seems natural to think of how the distribution of Y = weight varies with
X = transmission, in which case X is discrete and Y is continuous. But we could
also consider how the fraction of cars Y with automatic transmissions varies as a
function of X = weight, in which case Y is discrete and X is continuous.
In many regression problems we just want to display the relationship between
X and Y . Often a scatterplot or stripchart will suffice, as in Figure 3.1. Other
times, we will use a statistical model to describe the relationship. The statistical
model may have unknown parameters which we may wish to estimate or otherwise
make inference for. Examples of parametric models will come later. Our study of
regression begins with data display.
In many instances a simple plot is enough to show the relationship between X
and Y . But sometimes the relationship is obscured by the scatter of points. Then it
helps to draw a smooth curve through the data. Examples 3.1 and 3.2 illustrate.
Example 3.1 (1970 Draft Lottery)
3.1. INTRODUCTION
205
The result of the 1970 draft lottery is available at DASL . The website explains:
“In 1970, Congress instituted a random selection process for the military
draft. All 366 possible birth dates were placed in plastic capsules in a rotating
drum and were selected one by one. The first date drawn from the drum
received draft number one and eligible men born on that date were drafted
first. In a truly random lottery there should be no relationship between the
date and the draft number.”
Figure 3.2 shows the data, with X = day of year and Y = draft number. There is
no apparent relationship between X and Y .
Figure 3.2 was produced with the following snippet.
plot ( draft$Day.of.year, draft$Draft.No,
xlab="Day of year", ylab="Draft number" )
More formally, a relationship between X and Y usually means that the expected value
of Y is different for different values of X. (We don’t consider changes in SD or other
aspects of the distribution here.) Typically, when X is a continuous variable, changes in
Y are smooth, so we would adopt the model
E[Y | X] = g(X)
(3.1)
for some unknown smooth function g.
R has a variety of built-in functions to estimate g. These functions are called scatterplot smoothers, for obvious reasons. Figure 3.3 shows the draft lottery data with two
scatterplot smoother estimates of g. Both estimates show a clear trend, that birthdays
later in the year were more likely to have low draft numbers. check this: Following discovery of this trend, the procedure for drawing draft numbers was changed in subsequent
years.
Figure 3.3 was produced with the following snippet.
x <- draft$Day.of.year
y <- draft$Draft.No
plot ( x, y, xlab="Day of year", ylab="Draft number" )
lines ( lowess ( x, y ) )
lines ( supsmu ( x, y ), lty=2 )
206
200
0
100
Draft number
300
3.1. INTRODUCTION
0
100
200
300
Day of year
Figure 3.2: 1970 draft lottery. Draft number vs. day of year
207
200
0
100
Draft number
300
3.1. INTRODUCTION
0
100
200
300
Day of year
Figure 3.3: 1970 draft lottery. Draft number vs. day of year. Solid curve fit by
lowess; dashed curve fit by supsmu.
3.1. INTRODUCTION
208
• lowess (locally weighted scatterplot smoother) and supsmu (super smoother) are
two of R’s scatterplot smoothers. In the figure, the lowess curve is less wiggly
than the supsmu curve. Each smoother has a tuning parameter that can make the
curve more or less wiggly. Figure 3.3 was made with the default values for both
smoothers.
Example 3.2 (Seedlings, continued)
As mentioned in Example 1.6, the seedlings study was carried out at the Coweeta Long
Term Ecological Research station in western North Carolina. There were five plots at
different elevations on a hillside. Within each plot there was a 60m×1m strip running
along the hillside divided into 60 1m×1m quadrats. It is possible that the arrival rate
of New seedlings and the survival rates of both Old and New seedlings are different in
different plots and different quadrats. Figure 3.4 shows the total number of New seedlings
in each of the quadrats in one of the five plots. The lowess curve brings out the spatial
trend: low numbers to the left, a peak around quadrat 40, and a slight falling off by
quadrat 60.
Figure 3.4 was produced by
plot ( total.new, xlab="quadrat index",
ylab="total new seedlings" )
lines ( lowess ( total.new ) )
In a regression problem the data are pairs (xi , yi ) for i = 1, . . . , n. For each i, yi
is a random variable whose distribution depends on xi . We write
yi = g(xi ) + i .
(3.2)
Equation 3.2 expresses yi as a systematic or explainable part g(xi ) and an unexplained part i . g is called the regression function. Often the statistician’s goal is to
estimate g. As usual, the most important tool is a simple plot, similar to those in
Figures 3.1 through 3.4.
Once we have an estimate, ĝ, for the regression function g (either by a scatterplot smoother or by some other technique) we can calculate ri ≡ yi − ĝ(xi ). The
ri ’s are estimates of the i ’s and are called residuals. The i ’s themselves are called
errors. Because the ri ’s are estimates they are sometimes written with the “hat”
notation:
ˆi = ri = estimate of i
209
20
15
10
5
0
total new seedlings
25
3.1. INTRODUCTION
0
10
20
30
40
50
60
quadrat index
Figure 3.4: Total number of New seedlings 1993 – 1997, by quadrat.
3.2. NORMAL LINEAR MODELS
210
Residuals are used to evaluate and assess the fit of models for g, a topic which is
beyond the scope of this book.
In regression we use one variable to explain or predict the other. It is customary
in statistics to plot the predictor variable on the x-axis and the predicted variable
on the y-axis. The predictor is also called the independent variable, the explanatory
variable, the covariate, or simply x. The predicted variable is called the dependent
variable, or simply y. (In Economics x and y are sometimes called the exogenous
and endogenous variables, respectively.) Predicting or explaining y from x is not
perfect; knowing x does not tell us y exactly. But knowing x does tell us something
about y and allows us to make more accurate predictions than if we didn’t know x.
Regression models are agnostic about causality. In fact, instead of using x to
predict y, we could use y to predict x. So for each pair of variables there are two
possible regressions: using x to predict y and using y to predict x. Sometimes
neither variable causes the other. For example, consider a sample of cities and let
x be the number of churches and y be the number of bars. A scatterplot of x and
y will show a strong relationship between them. But the relationship is caused by
the population of the cities. Large cities have large numbers of bars and churches
and appear near the upper right of the scatterplot. Small cities have small numbers
of bars and churches and appear near the lower left.
Scatterplot smoothers are a relatively unstructured way to estimate g. Their
output follows the data points more or less closely as the tuning parameter allows
ĝ to be more or less wiggly. Sometimes an unstructured approach is appropriate,
but not always. The rest of Chapter 3 presents more structured ways to estimate g.
3.2
3.2.1
Normal Linear Models
Introduction
In Section 1.3.4 we studied the Normal distribution, useful for continuous populations having a central tendency with roughly equally sized tails. In Section 3.2 we
generalize to the case where there are many Normal distributions with different
means which depend in a systematic way on another variable. We begin our study
with an example in which there are three distinct distributions.
Example 3.3 (Hot Dogs, continued)
Figure 3.5 displays calorie data for three types of hot dogs. It appears that poultry hot
dogs have, on average, slightly fewer calories than beef or meat hot dogs. How should
we model these data?
211
Beef
Meat
Poultry
3.2. NORMAL LINEAR MODELS
100
120
140
160
180
calories
Figure 3.5: Calorie content of hot dogs
3.2. NORMAL LINEAR MODELS
212
Figure 3.5 was produced with
stripchart ( hotdogs$Calories ~ hotdogs$Type, pch=1,
xlab="calories" )
There are 20 Beef, 17 Meat and 17 Poultry hot dogs in the sample. We think of
them as samples from much larger populations. Figure 3.6 shows density estimates of
calorie content for the three types. For each type of hot dog, the calorie contents cluster
around a central value and fall off to either side without a particularly long left or right
tail. So it is reasonable, at least as a first attempt, to model the three distributions as
Normal. Since the three distributions have about the same amount of spread we model
them as all having the same SD. We adopt the model
B1 , . . . , B20 ∼ i.i.d. N(µB , σ)
M1 , . . . , M17 ∼ i.i.d. N(µM , σ)
P1 , . . . , P17 ∼ i.i.d. N(µP , σ),
(3.3)
where the Bi ’s, Mi ’s and Pi ’s are the calorie contents of the Beef, Meat and Poultry hot
dogs respectively. Figure 3.6 suggests
µB ≈ 150;
µM ≈ 160;
µP ≈ 120;
σ ≈ 30.
An equivalent formulation is
B1 , . . . , B20 ∼ i.i.d. N(µ, σ)
M1 , . . . , M17 ∼ i.i.d. N(µ + δM , σ)
P1 , . . . , P17 ∼ i.i.d. N(µ + δP , σ)
(3.4)
Models 3.3 and 3.4 are mathematically equivalent. Each has three parameters for the
population means and one for the SD. They describe exactly the same set of distributions
and the parameters of either model can be written in terms of the other. The equivalence
is shown in Table 3.3. For the purpose of further exposition we adopt Model 3.4.
We will see later how to carry out inferences regarding the parameters. For now we
stop with the model.
Figure 3.6 was produced with the following snippet.
3.2. NORMAL LINEAR MODELS
213
Beef
50
100
150
200
250
200
250
200
250
calories
Meat
50
100
150
calories
Poultry
50
100
150
calories
Figure 3.6: Density estimates of calorie contents of hot dogs
3.2. NORMAL LINEAR MODELS
214
par ( mfrow=c(3,1))
plot ( density ( hotdogs$C[hotdogs$T=="Beef"], bw=20 ),
xlim=c(50,250), yaxt="n", ylab="", xlab="calories",
main="Beef" )
plot ( density ( hotdogs$C[hotdogs$T=="Meat"], bw=20 ),
xlim=c(50,250), yaxt="n", ylab="", xlab="calories",
main="Meat" )
plot ( density ( hotdogs$C[hotdogs$T=="Poultry"], bw=20 ),
xlim=c(50,250), yaxt="n", ylab="", xlab="calories",
main="Poultry" )
• hotdogs$C and hotdogs$T illustrate a convenient feature of R, that components
of a structure can be abbreviated. Instead of typing hotdogs$Calories and
hotdogs$Type we can use the abbreviations. The same thing applies to arguments
of functions.
• density ( ..., bw=20 ) specifies the bandwidth of the density estimate. Larger
bandwidth gives a smoother estimate; smaller bandwidth gives a more wiggly estimate. Try different bandwidths to see what they do.
The PlantGrowth data set in R provides another example. As R explains, the
data previously appeared in Dobson [1983] and are
“Results from an experiment to compare yields (as measured by dried
weight of plants) obtained under a control and two different treatment
conditions.”
The first several lines are
1
2
3
weight group
4.17 ctrl
5.58 ctrl
5.18 ctrl
Figure 3.7 shows the whole data set.
It appears that plants grown under different treatments tend to have different
weights. In particular, plants grown under Treatment 1 appear to be smaller on average than plants grown under either the Control or Treatment 2. What statistical
model should we adopt?
3.2. NORMAL LINEAR MODELS
Model 3.3
Model 3.4
µB
µ
µM
µ + δM
µP
µ + δP
µM − µB
δM
µP − µB
δP
σ
σ
215
Interpretation
mean calorie content
of Beef hot dogs
mean calorie content
of Meat hot dogs
mean calorie content
of Poultry hot dogs
mean calorie difference between Beef
and Meat hotdogs
mean calorie difference between Beef
and Poultry hotdogs
SD of calorie content
within a single type of
hot dog
Approximate value
150
160
120
10
-30
30
ctrl
trt1
trt2
Table 3.1: Correspondence between Models 3.3 and 3.4
3.5
4.0
4.5
5.0
5.5
weight
Figure 3.7: The PlantGrowth data
6.0
3.2. NORMAL LINEAR MODELS
216
Figure 3.7 was produced with the following snippet.
stripchart ( PlantGrowth$weight ~ PlantGrowth$group, pch=1,
xlab="weight" )
First, we think of the 10 plants grown under each condition as a sample from a
much larger population of plants that could have been grown. Second, a look at the
data suggests that the weights in each group are clustered around a central value,
approximately symmetrically without an especially long tail in either direction. So
we model the weights as having Normal distributions.
But we should allow for the possibility that the three populations have different
means. (We do not address the possibility of different SD’s here.) Let µ be the
population mean of plants grown under the Control condition, δ1 and δ2 be the
extra weight due to Treatment 1 and Treatment 2 respectively, and σ be the SD.
We adopt the model
WC,1 , . . . , WC,10 ∼ i.i.d. N(µ, σ)
WT1 ,1 , . . . , WT1 ,10 ∼ i.i.d. N(µ + δ1 , σ)
WT2 ,1 , . . . , WT2 ,10 ∼ i.i.d. N(µ + δ2 , σ).
(3.5)
There is a mathematical structure shared by 3.4, 3.5 and many other statistical
models, and some common statistical notation to describe it. We’ll use the hot dog
data to illustrate.
Example 3.4 (Hot Dogs, continued)
Example 3.4 continues Example 2.2. First, there is the main variable of interest, often
called the response variable and denoted Y . For the hot dog data Y is calorie content.
(Another analysis could be made in which Y is sodium content.)
The distribution of Y is different under different circumstances. In this example, Y
has a Normal distribution whose mean depends on the type of hot dog. In general, the
distribution of Y will depend on some quantity of interest, called a covariate, regressor,
or explanatory variable. Covariates are often called X.
The data consists of multiple data points, or cases. We write Yi and Xi for the i’th
case. It is usual to represent the data as a matrix with one row for each case. One
column is for Y ; the other columns are for explanatory variables. For the hot dog data
the matrix is
Type
Calories
Sodium
3.2. NORMAL LINEAR MODELS
Beef
Beef
...
Meat
Meat
Poultry
Poultry
...
217
186
181
495
477
140
138
129
132
428
339
430
375
(For analysis of calories, the third column is irrelevant.)
Rewriting the data matrix in a slightly different form reveals some mathematical structure common to many models. There are 54 cases in the hotdog study. Let (Y1 , . . . , Y54 )
be their calorie contents. For each i from 1 to 54, define two new variables X1,i and X2,i
by
(
1 if the i’th hot dog is Meat,
X1,i =
0 otherwise
and
X2,i
(
1 if the i’th hot dog is Poultry,
=
0 otherwise.
X1,i and X2,i are indicator variables. Two indicator variables suffice because, for the i’th
hot dog, if we know X1,i and X2,i , then we know what type it is. (More generally, if
there are k populations, then k − 1 indicator variables suffice.) With these new variables,
Model 3.4 can be rewritten as
Yi = µ + δM X1,i + δP X2,i + i
(3.6)
for i = 1, . . . , 54, where
1 , . . . , 54 ∼ i.i.d. N(0, σ).
Equation 3.6 is actually 54 separate equations, one for each case. We can write them
succinctly using vector and matrix notation. Let
Y = (Y1 , . . . , Y54 )t ,
B = (µ, δM , δP )t ,
E = (1 , . . . , 54 )t ,
3.2. NORMAL LINEAR MODELS
218
(The transpose is there because, by convention, vectors are column vectors.) and
1
1
..
.
1
1
X=
...
1
1
.
..
0
0
..
.
0
1
..
.
1
0
..
.
1 0
0
0
..
.
0
0
..
.
0
1
..
.
1
X is a 54 × 3 matrix. The first 20 lines are for the Beef hot dogs; the next 17 are for
the Meat hot dogs; and the final 17 are for the Poultry hot dogs. Equation 3.6 can be
written
Y = XB + E
(3.7)
Equations similar to 3.6 and 3.7 are common to many statistical models. For
the PlantGrowth data (page 214) let
Yi = weight of i’th plant,
(
1 if i’th plant received treatment 1
X1,i =
0 otherwise
(
1 if i’th plant received treatment 2
X2,i =
0 otherwise
Y = (Y1 , . . . , Y30 )t
B = (µ, δ1 , δ2 )t
E = (1 , . . . , 30 )t
3.2. NORMAL LINEAR MODELS
219
and
1
1
..
.
1
1
X=
...
1
1
.
..
0
0
..
.
0
1
..
.
1
0
..
.
1 0
0
0
..
.
0
0
..
.
0
1
..
.
1
Then analogously to 3.6 and 3.7 we can write
Yi = µ + δ1 X1,i + δ2 X2,i + i
(3.8)
Y = XB + E.
(3.9)
and
Notice that Equation 3.6 is nearly identical to Equation 3.8 and Equation 3.7
is identical to Equation 3.9. Their structure is common to many statistical models.
Each Yi is written as the sum of two parts. The first part, XB, (µ+δM X1,i +δP X2,i for
the hot dogs; µ + δ1 X1,i + δ2 X2,i for PlantGrowth) is called systematic, deterministic,
or signal and represents the explainable differences between populations. The
second part, E, or i , is random, or noise, and represents the differences between
hot dogs or plants within a single population. The i ’s are called errors. In statistics,
the word “error” does not indicate a mistake; it simply means the noise part of a
model, or the part left unexplained by covariates. Modelling a response variable as
response = signal + noise
is a useful way to think and will recur throughout this book.
In 3.6 the signal µ + δM X1,i + δP X2,i is a linear function of (µ, δM , δP ). In 3.8
the signal µ + δ1 X1,i + δ2 X2,i is a linear function of (µ, δ1 , δ2 ). Models in which the
signal is a linear function of the parameters are called linear models.
In our examples so far, X has been an indicator. For each of a finite number
of X’s there has been a corresponding population of Y ’s. As the next example
illustrates, linear models can also arise when X is a continuous variable.
3.2. NORMAL LINEAR MODELS
220
Example 3.5 (Ice Cream Consumption)
This example comes from DASL, which says
“Ice cream consumption was measured over 30 four-week periods from
March 18, 1951 to July 11, 1953. The purpose of the study was to determine
if ice cream consumption depends on the variables price, income, or temperature. The variables Lag-temp and Year have been added to the original
data.”
You can download the data from
http://lib.stat.cmu.edu/DASL/Datafiles/IceCream.html.
The first few lines look like this:
date
1
2
3
IC
.386
.374
.393
price
.270
.282
.277
income
78
79
81
temp
41
56
63
Lag-temp
56
63
68
Year
0
0
0
The variables are
date Time period (1-30) of the study (from 3/18/51 to 7/11/53)
IC Ice cream consumption in pints per capita
Price Price of ice cream per pint in dollars
Income Weekly family income in dollars
Temp Mean temperature in degrees F
Lag-temp Temp variable lagged by one time period
Year Year within the study (0 = 1951, 1 = 1952, 2 = 1953)
Figure 3.8 is a plot of consumption versus temperature. It looks as though an equation
of the form
consumption = β0 + β1 temperature + error
(3.10)
3.2. NORMAL LINEAR MODELS
221
would describe the data reasonably well. This is a linear model, not because consumption
is a linear function of temperature, but because it is a linear function of (β0 , β1 ). To
write it in matrix form, let
Y = (IC1 , . . . , IC30 )t
B = (β0 , β1 )t
E = (1 , . . . , 30 )t
and
1
1
X = ..
.
temp1
temp2
..
.
1 temp30
The model is
Y = XB + E.
(3.11)
Equation 3.11 is a linear model, identical to Equations 3.7 and 3.9.
Equation 3.7 (equivalently, 3.9 or 3.11) is the basic form of all linear models.
Linear models are extremely useful because they can be applied to so many kinds
of data sets. Section 3.2.2 investigates some of their theoretical properties and R’s
functions for fitting them to data.
3.2.2
Inference for Linear Models
Section 3.2.1 showed some graphical displays of data that were eventually described by linear models. Section 3.2.2 treats more formal inference for linear
models. We begin by deriving the likelihood function.
Linear models are described by Equation 3.7 (equivalently, 3.9 or 3.11) which
we repeat here for convenience:
Y = XB + E.
(3.12)
In general there is an arbitrary number of cases, say n, and an arbitrary number
of covariates, say p. Equation 3.12 is shorthand for the collection of univariate
equations
Yi = β0 + β1 X1,i + · · · + βp Xp,i + i
(3.13)
222
0.40
0.25
0.30
0.35
consumption
0.45
0.50
0.55
3.2. NORMAL LINEAR MODELS
30
40
50
60
70
temperature
Figure 3.8: Ice cream consumption (pints per capita) versus mean temperature
(◦ F)
3.2. NORMAL LINEAR MODELS
223
or equivalently,
Yi ∼ N(µi , σ)
P
for i = 1, . . . , n where µi = β0 + j βj Xj,i and the i ’s are i.i.d. N(0, σ). There are
p + 2 parameters: (β0 , . . . , βp , σ). The likelihood function is
`(β0 , . . . , βp , σ) =
n
Y
p(yi | β0 , . . . , βp , σ)
i=1
=
n
Y
i=1
n
Y
√
1 yi −µi 2
1
e− 2 ( σ )
2πσ
„
P
y −(β + β X
)
«2
0
i
j j,i
−1
1
σ
√
e 2
=
2πσ
i=1
P
− n
2
1 P
= 2πσ 2 2 e− 2σ2 i (yi −(β0 + βj Xj,i ))
(3.14)
Likelihood 3.14 is a function of the p + 2 parameters. To find the m.l.e.’s we
could differentiate 3.14 with respect to each parameter in turn, set the derivatives
equal to 0, and solve. But it is easier to take the log of 3.14 first, then differentiate
and solve.
!2
X
1 X
yi − (β0 +
βj Xi,j )
log `(β0 , . . . , βp , σ) = C − n log σ − 2
2σ i
j
for some irrelevant constant C, so we get the system of equations
X
1 X
y
−
(
β̂
+
β̂j Xi,j ) = 0
i
0
2
σ̂ i
j
X
X
1
yi − (β̂0 +
β̂j Xi,j ) Xi,1 = 0
2
σ̂ i
j
..
.
X
1 X
y
−
(
β̂
+
β̂j Xi,j ) Xi,p = 0
i
0
2
σ̂ i
j
X
2
n
1 X
− + 3
yi − (β̂0 +
β̂j Xi,j ) = 0
σ̂ σ̂ i
j
(3.15)
3.2. NORMAL LINEAR MODELS
224
Note the hat notation to indicate estimates. The m.l.e.’s (β̂0 , . . . , β̂p , σ̂) are the
values of the parameters that make the derivatives equal to 0 and therefore satisfy
Equations 3.15. The first p + 1 of these equations can be multiplied by σ 2 , yielding
p + 1 linear equations in the p + 1 unknown β’s. Because they’re linear, they can be
solved by linear algebra. The solution is
B̂ = (Xt X)−1 Xt Y,
using the notation of Equation 3.12.
For each i ∈ {1, . . . , n}, let
ŷi = β̂0 + x1i β̂1 + · · · + xpi β̂p .
The ŷi ’s are called fitted values. The residuals are
ri = yi − ŷi
= yi − β̂0 + x1i β̂1 + · · · + xpi β̂p
and are estimates of the errors i . Finally, referring to the last line of Equation 3.15,
the m.l.e. σ̂ is found from
X
2
1 X
n
yi − (β0 +
βj Xi,j )
0=− + 3
σ σ i
j
1 X 2
n
=− + 3
r
σ σ i i
so
σ̂ 2 =
1X 2
ri
n
and
ri2
n
P
σ̂ =
12
(3.16)
In addition to the m.l.e.’s we often want to look at the likelihood function to
judge, for example, how accurately each β can be estimated. The likelihood function for a single βi comes from the Central Limit Theorem. We will not work out
the math here but, fortunately, R will do all the calculations for us. We illustrate
with the hot dog data.
3.2. NORMAL LINEAR MODELS
225
Example 3.6 (Hot Dogs, continued)
Estimating the parameters of a model is called fitting a model to data. R has built-in
commands for fitting models. The following snippet fits Model 3.7 to the hot dog data.
The syntax is similar for many model fitting commands in R, so it is worth spending some
time to understand it.
hotdogs.fit <- lm ( hotdogs$Calories ~ hotdogs$Type )
• lm stands for linear model.
• ˜ stands for “is a function of”. It is used in many of R’s modelling commands. y ˜
x is called a formula and means that y is modelled as a function of x. In the case
at hand, Calories is modelled as a function of Type.
• lm specifies the type of model.
• R automatically creates the X matrix in Equation 3.12 and estimates the parameters.
• The result of fitting the model is stored in a new object called hotdogs.fit. Of
course we could have called it anything we like.
• lm can have an argument data, which specifies a dataframe. So instead of
hotdogs.fit <- lm ( hotdogs$Calories ~ hotdogs$Type )
we could have written
hotdogs.fit <- lm ( Calories ~ Type, data=hotdogs )
You may want to try this to see how it works.
To see hotdogs.fit, use R’s summary function. It’s use and the resulting output are
shown in the following snippet.
3.2. NORMAL LINEAR MODELS
226
> summary(hotdogs.fit)
Call:
lm(formula = hotdogs$Calories ~ hotdogs$Type)
Residuals:
Min
1Q
-51.706 -18.492
Median
-5.278
3Q
22.500
Max
36.294
Coefficients:
Estimate Std. Error t value Pr(>|t|)
(Intercept)
156.850
5.246 29.901 < 2e-16 ***
hotdogs$TypeMeat
1.856
7.739
0.240
0.811
hotdogs$TypePoultry -38.085
7.739 -4.921 9.4e-06 ***
--Signif. codes: 0 ‘***’ 0.001 ‘**’ 0.01 ‘*’ 0.05 ‘.’ 0.1 ‘ ’ 1
Residual standard error: 23.46 on 51 degrees of freedom
Multiple R-Squared: 0.3866,
Adjusted R-squared: 0.3626
F-statistic: 16.07 on 2 and 51 DF, p-value: 3.862e-06
The most important part of the output is the table labelled Coefficients:. There is
one row of the table for each coefficient. Their names are on the left. In this table
the names are Intercept, hotdogs$TypeMeat, and hotdogs$TypePoultry. The first
column is labelled Estimate. Those are the m.l.e.’s. R has fit the model
Yi = β0 + β1 X1,i + β2 X2,i + i
where X1 and X2 are indicator variables for the type of hot dog. The model implies
Yi = β0 + i
Yi = β0 + β1 + i
Yi = β0 + β2 + i
for beef hotdogs
for meat hotdogs
for poultry hotdogs
Therefore the names mean
β0 = Intercept
= mean calorie content of beef hot dogs
β1 = hotdogs$TypeMeat
= mean difference between beef and meat hot dogs
β2 = hotdogs$TypePoultry = mean difference between
beef and poultry hot dogs
3.2. NORMAL LINEAR MODELS
227
From the Coefficients table the estimates are
β̂0 = 156.850
β̂1 = 1.856
β̂2 = −38.085
The next column of the table is labelled Std. Error. It contains the SD’s of the
estimates. In this case, β̂0 has an SD of about 5.2; β̂1 has an SD of about 7.7, and β̂2
also has an SD of about 7.7. The Central Limit Theorem says that approximately, in
large samples
β̂0 ∼ N(β0 , σβ0 )
β̂1 ∼ N(β1 , σβ1 )
β̂2 ∼ N(β2 , σβ2 )
The SD’s in the table are estimates of the SD’s in the Central Limit Theorem.
Figure 3.9 plots the likelihood functions. The interpretation is that β0 is likely somewhere around 157, plus or minus about 10 or so; β1 is somewhere around 2, plus or
minus about 15 or so; and β2 is somewhere around -38, plus or minus about 15 or so.
(Compare to Table 3.3.) In particular, there is no strong evidence that Meat hot dogs
have, on average, more or fewer calories than Beef hot dogs; but there is quite strong
evidence that Poultry hot dogs have considerably fewer.
Figure 3.9 was produced with the following snippet.
m <- c ( 156.85, 1.856, -38.085 )
s <- c ( 5.246, 7.739, 7.739 )
par ( mfrow=c(2,2) )
x <- seq ( m[1]-3*s[1], m[1]+3*s[1], length=40 )
plot ( x, dnorm(x,m[1],s[1]), type="l",
xlab=expression(mu), ylab="likelihood", yaxt="n" )
x <- seq ( m[2]-3*s[2], m[2]+3*s[2], length=40 )
plot ( x, dnorm(x,m[2],s[2]), type="l",
xlab=expression(delta[M]),
ylab="likelihood", yaxt="n" )
228
likelihood
likelihood
3.2. NORMAL LINEAR MODELS
140 150 160 170
µ
!20
0 10
likelihood
!M
!60
!40
!20
!P
Figure 3.9: Likelihood functions for (µ, δM , δP ) in the Hot Dog example.
3.2. NORMAL LINEAR MODELS
229
x <- seq ( m[3]-3*s[3], m[3]+3*s[3], length=40 )
plot ( x, dnorm(x,m[3],s[3]), type="l",
xlab=expression(delta[P]),
ylab="likelihood", yaxt="n" )
The summary also gives an estimate of σ. The estimate is labelled Residual
standard error. In this case, σ̂ ≈ 23.46.1 So our model says that for each type
of hot dog, the calorie contents have approximately a Normal distribution with SD about
23 or so. Compare to Figure 3.5 to see whether the 23.46 makes sense.
Regression is sometimes used in an exploratory setting, when scientists want
to find out which variables are related to which other variables. Often there is a
response variable Y , (imagine, for example, performance in school) and they want
to know which other variables affect Y (imagine, for example, poverty, amount of
television watching, computer in the home, parental involvment, etc.) Example 3.7
illustrates the process.
Example 3.7 (mtcars)
This example uses linear regression to explore the R data set mtcars (See Figure 3.1,
panel (c)) more thoroughly with the goal of modelling mpg (miles per gallon) as a
function of the other variables. As usual, type data(mtcars) to load the data into R
and help(mtcars) for an explanation. As R explains:
“The data was extracted from the 1974 Motor Trend US magazine, and
comprises fuel consumption and 10 aspects of automobile design and performance for 32 automobiles (1973-74 models).”
In an exploratory exercise such as this, it often helps to begin by looking at the data.
Accordingly, Figure 3.10 is a pairs plot of the data, using just the continuous variables.
Figure 3.10 was produced by
pairs ( mtcars[,c(1,3:7)] )
1
P
R, like most statistical software, does not report the m.l.e. but reports instead σ̂ ≡ ( ri2 /(n −
p − 1))1/2 . Compare to Equation 3.16 for the m.l.e. in which the denominator is n. The situation
is similar to the sample SD on page 98. When n p there is little difference between the two
estimates.
3.2. NORMAL LINEAR MODELS
400
3.0
4.5
16
22
25
100
230
400
10
mpg
250
100
disp
4.5
50
hp
4
3.0
drat
22
2
wt
16
qsec
10
25
50
250
2
4
Figure 3.10: pairs plot of the mtcars data. Type help(mtcars) in R for an explanation.
3.2. NORMAL LINEAR MODELS
231
Clearly, mpg is related to several of the other variables. Weight is an obvious and
intuitive example. The figure suggests that the linear model
mpg = β0 + β1 wt + (3.17)
is a good start to modelling the data. Figure 3.11(a) is a plot of mpg vs. weight plus
the fitted line. The estimated coefficients turn out to be β̂0 ≈ 37.3 and β̂1 ≈ −5.34.
The interpretation is that mpg decreases by about 5.34 for every 1000 pounds of weight.
Note: this does not mean that if you put a 1000 pound weight in your car your mileage
mpg will decrease by 5.34. It means that if car A weighs about 1000 pounds less than
car B, then we expect car A to get an extra 5.34 miles per gallon. But there are likely
many differences between A and B besides weight. The 5.34 accounts for all of those
differences, on average.
We could just as easily have begun by fitting mpg as a function of horsepower with
the model
mpg = γ0 + γ1 hp + (3.18)
We use γ’s to distinguish the coefficients in Equation 3.18 from those in Equation 3.17.
The m.l.e.’s turn out to be γ̂0 ≈ 30.1 and γ̂1 ≈ −0.069. Figure 3.11(b) shows the
corresponding scatterplot and fitted line. Which model do we prefer? Choosing among
different possible models is a major area of statistical practice with a large literature that
can be highly technical. In this book we show just a few considerations.
One way to judge models is through residual plots, which are plots of residuals versus
either X variables or fitted values. If models are adequate, then residual plots should
show no obvious patterns. Patterns in residual plots are clues to model inadequacy and
how to improve models. Figure 3.11(c) and (d) are residual plots for mpg.fit1 (mpg
vs. wt) and mpg.fit2 (mpg vs. hp). There are no obvious patterns in panel (c). In
panel (d) there is a suggestion of curvature. For fitted values between about 15 and 23,
residuals tend to be low but for fitted values less than about 15 or greater than about
23, residuals tend to be high (The same pattern might have been noted in panel (b).)
suggesting that mpg might be better fit as a nonlinear function of hp. We do not pursue
that suggestion further at the moment, merely noting that there may be a minor flaw in
mpg.fit2 and we therefore slightly prefer mpg.fit1.
Another thing to note from panels (c) and (d) is the overall size of the residuals.
In (c), they run from about -4 to about +6, while in (d) they run from about -6 to about
+6. That is, the residuals from mpg.fit2 tend to be slightly larger in absolute value
than the residuals from mpg.fit1, suggesting that wt predicts mpg slightly better than
does hp. That impression can be confirmed by getting the summary of both fits and
checking σ̂. From mpg.fit1 σ̂ ≈ 3.046 while from mpg.fit2 σ̂ ≈ 3.863. I.e., from wt
3.2. NORMAL LINEAR MODELS
232
we can predict mpg to within about 6 or so (two SD’s) while from hp we can predict
mpg only to within about 7.7 or so. For this reason too, we slightly prefer mpg.fit1 to
mpg.fit2.
What about the possibility of using both weight and horsepower to predict mpg?
Consider
mpg.fit3 <- lm ( mpg ~ wt + hp, data=mtcars )
• The formula y ˜ x1 + x2 means fit y as a function of both x1 and x2. In our
example that means
mpg = δ0 + δ1 wt1 + δ2 hp2 + (3.19)
A residual plot from model 3.19 is shown in Figure 3.11 (e). The m.l.e.’s are δ̂0 ≈ 37.2,
δ̂1 ≈ −3.88, δ̂2 ≈ −0.03, and σ̂ ≈ 2.6. Since the residual plot looks curved, Model 3.17
has residuals about as small as Model 3.19, and Model 3.17 is more parsimonious than
Model 3.19 we slightly prefer Model 3.17.
Figure 3.11 (a) was produced with
plot ( mtcars$wt, mtcars$mpg, xlab="weight", ylab="mpg" )
mpg.fit1 <- lm ( mpg ~ wt, data=mtcars )
abline ( coef(mpg.fit1) )
Figure 3.11, panels (c) and (d) were produced with
# panel c
plot ( fitted(mpg.fit1), resid(mpg.fit1), main="(c)",
xlab="fitted values from fit1", ylab="resid" )
# panel d
plot ( fitted(mpg.fit2), resid(mpg.fit2),
xlab="fitted values from fit2", ylab="resid",
main="(d)" )
3.2. NORMAL LINEAR MODELS
233
10
3
4
5
50
150
250
weight
horsepower
(c)
(d)
2
!6
!4
!2
resid
6
0 2 4 6
2
resid
20
mpg
20
10
mpg
30
(b)
30
(a)
10
15
20
25
30
fitted values from fit1
10
15
20
25
fitted values from fit2
2
0
!4
resid
4
6
(e)
10
15
20
25
30
fitted values from fit3
Figure 3.11: mtcars — (a): mpg vs. wt; (b): mpg vs. hp; (c): residual plot from
mpg˜ wt; (d): residual plot from mpg˜ hp; (e): residual plot from mpg˜ wt+hp
3.2. NORMAL LINEAR MODELS
234
In Example 3.7 we fit three models for mpg, repeated here with their original
equation numbers.
mpg = β0 + β1 wt + mpg = γ0 + γ1 hp + mpg = δ0 + δ1 wt1 + δ2 hp + (3.17)
(3.18)
(3.19)
What is the connection between, say, β1 and δ1 , or between γ1 and δ2 ? β1 is the
average mpg difference between two cars whose weights differ by 1000 pounds.
Since heavier cars tend to be different than lighter cars in many ways, not just in
weight, β1 captures the net effect on mpg of all those differences. On the other
hand, δ1 is the average mpg difference between two cars of identical horsepower
but whose weights differ by 1000 pounds. Figure 3.12 shows the likelihood functions of these four parameters. The evidence suggests that β1 is probably in the
range of about -7 to about -4, while δ1 is in the range of about -6 to -2. It’s possible
that β1 ≈ δ1 . On the other hand, γ1 is probably in the interval (−.1, −.04) while
δ2 is probably in the interval (−.05, 0). It’s quite likely that γ1 6≈ δ2 . Scientists
sometimes ask the question “What is the effect of variable X on variable Y ?” That
question does not have an unambiguous answer; the answer depends on which
other variables are accounted for and which are not.
Figure 3.12 was produced with
par ( mfrow=c(2,2) )
x <- seq ( -8, -1.5, len=60 )
plot ( x, dnorm(x,-5.3445,.5591), type="l",
xlab=expression(beta[1]), ylab="", yaxt="n" )
x <- seq ( -.1, 0, len=60 )
plot ( x, dnorm(x,-.06823,.01012), type="l",
xlab=expression(gamma[1]), ylab="", yaxt="n" )
x <- seq ( -8, -1.5, len=60 )
plot ( x, dnorm(x,-3.87783,.63273), type="l",
xlab=expression(delta[1]), ylab="", yaxt="n" )
x <- seq ( -.1, 0, len=60 )
plot ( x, dnorm(x,-.03177,.00903), type="l",
xlab=expression(delta[2]), ylab="", yaxt="n" )
3.2. NORMAL LINEAR MODELS
!8
!6
!4
235
!2
!0.10
!6
!4
#1
0.00
"1
!1
!8
!0.04
!2
!0.10
!0.04
0.00
#2
Figure 3.12: likelihood functions for β1 , γ1 , δ1 and δ2 in the mtcars example.
3.3. GENERALIZED LINEAR MODELS
3.3
3.3.1
236
Generalized Linear Models
Logistic Regression
Look again at panel (c) in Figure 3.1 on page 203. The dependent variable is binary,
as opposed to the continuous dependent variables in panels (a), (b) and (d). In (a),
(b) and (d) we modelled Y | X as having a Normal distribution; regression was a
model for E[Y | X], the mean of that Normal distribution as a function of X. In (c)
Y | X has a Binomial distribution. We still use the term “regression” for a model of
E[Y | X]. When Y is binary, regression is a model for the probability of success θ as
a function of X.
Figure 3.13 shows two more scatterplots where Y is a binary variable. The data
are described in the next two examples.
Example 3.8 (FACE, continued)
Refer to Examples 1.12 and 2.11 about the FACE experiment to assess the effects of
excess CO2 on the growth of the forest. To describe the size of trees, ecologists sometimes
use Diameter at Breast Height, or DBH. DBH was recorded every year for each loblolly
pine tree in the FACE experiment. One potential effect of elevated CO2 is for the trees to
reach sexual maturity and hence be able to reproduce earlier than otherwise. If they do
mature earlier, ecologists would like to know whether that’s due only to their increased
size, or whether trees will reach maturity not just at younger ages, but also at smaller
sizes. Sexually mature trees can produce pine cones but immature trees cannot. So to
investigate sexual maturity, a graduate student counted the number of pine cones on
each tree. For each tree let X be its DBH and Y be either 1 or 0 according to whether
the tree has pine cones.
Figure 3.13(a) is a plot of Y versus X for all the trees in Ring 1. It does appear that
larger trees are more likely to have pine cones.
Example 3.9 (O-rings)
“On January 28, 1986 America was shocked by the destruction of the space shuttle
Challenger, and the death of its seven crew members.” So begins the website http:
//www.fas.org/spp/51L.html of the Federation of American Scientist’s Space Policy
Project.
Up until 1986 the space shuttle orbiter was lifted into space by a pair of booster rockets, one on each side of the shuttle, that were comprised of four sections stacked vertically
on top of each other. The joints between the sections were sealed by O-rings. On January
28, 1986 the temperature at launch time was so cold that the O-rings became brittle and
failed to seal the joints, allowing hot exhaust gas to come into contact with unburned
3.3. GENERALIZED LINEAR MODELS
237
fuel. The result was the Challenger disaster. An investigation ensued. The website
http://science.ksc.nasa.gov/shuttle/missions/51-l/docs contains links to
1. a description of the event,
2. a report (Kerwin) on the initial attempt to determine the cause,
3. a report (rogers-commission) of the presidential investigative commission that finally did determine the cause, and
4. a transcript of the operational recorder voice tape.
One of the issues was whether NASA could or should have forseen that cold weather
might diminish performance of the O-rings.
After launch the booster rockets detach from the orbiter and fall into the ocean where
they are recovered by NASA, taken apart and analyzed. As part of the analysis NASA
records whether any of the O-rings were damaged by contact with hot exhaust gas. If
the probability of damage is greater in cold weather then, in principle, NASA might have
forseen the possibility of the accident which occurred during a launch much colder than
any previous launch.
Figure 3.13(b) plots Y = presence of damage against X = temperature for the
launches prior to the Challenger accident. The figure does suggest that colder launches
are more likely to have damaged O-rings. What is wanted is a model for probability of
damage as a function of temperature, and a prediction for probability of damage at 37◦ F,
the temperature of the Challenger launch.
Fitting straight lines to Figure 3.13 doesn’t make sense. In panel (a) what we
need is a curve such that
1. E[Y | X] = P[Y = 1 | X] is close to 0 when X is smaller than about 10 or
12 cm., and
2. E[Y | X] = P[Y = 1 | X] is close to 1 when X is larger than about 25 or 30 cm.
In panel (b) we need a curve that goes in the opposite direction.
The most commonly adopted model in such situations is
E[Y | X] = P[Y = 1 | X] =
eβ0 +β1 x
1 + eβ0 +β1 x
(3.20)
Figure 3.14 shows the same data as Figure 3.13 with some curves added according
to Equation 3.20. The values of β0 and β1 are in Table 3.3.1.
3.3. GENERALIZED LINEAR MODELS
238
0.8
0.4
0.0
pine cones present
(a)
5
10
15
20
25
DBH
0.8
0.4
0.0
damage present
(b)
55
60
65
70
75
80
temperature
Figure 3.13: (a): pine cone presence/absence vs. dbh. (b): O-ring damage vs.
launch temperature
3.3. GENERALIZED LINEAR MODELS
239
0.8
0.4
0.0
pine cones present
(a)
5
10
15
20
25
DBH
0.8
0.4
0.0
damage present
(b)
55
60
65
70
75
80
temperature
Figure 3.14: (a): pine cone presence/absence vs. dbh. (b): O-ring damage vs.
launch temperature, with some logistic regression curves
3.3. GENERALIZED LINEAR MODELS
(a)
(b)
solid
dashed
dotted
solid
dashed
dotted
240
β0
-8
-7.5
-5
20
15
18
β1
.45
.36
.45
-.3
-.23
-.3
Table 3.2: β’s for Figure 3.14
Figure 3.14 was produced by the following snippet.
par ( mfrow=c(2,1) )
plot ( cones$dbh[ring1], mature[ring1], xlab="DBH",
ylab="pine cones present", main="(a)" )
x <- seq ( 4, 25, length=40 )
b0 <- c(-8, -7.5, -5)
b1 <- c ( .45, .36, .45 )
for ( i in 1:3 )
lines ( x, exp(b0[i] + b1[i]*x)/(1 + exp(b0[i] + b1[i]*x) ),
lty=i )
plot ( orings$temp, orings$damage>0, xlab="temperature",
ylab="damage present", main="(b)" )
x <- seq ( 50, 82, length=40 )
b0 <- c(20, 15, 18)
b1 <- c ( -.3, -.23, -.3 )
for ( i in 1:3 )
lines ( x, exp(b0[i] + b1[i]*x)/(1 + exp(b0[i] + b1[i]*x) ),
lty=i )
Model 3.20 is known as logistic regression. Let the i’th observation have covariate xi and probability of success θi = E[Yi | xi ]. Define
θi
.
φi ≡ log
1 − θi
3.3. GENERALIZED LINEAR MODELS
241
φi is called the logit of θi . The inverse transformation is
θi =
eφi
.
1 + e φi
The logistic regression model is
φi = β0 + β1 xi .
This is called a generalized linear model or glm because it is a linear model for φ, a
transformation of E(Y | x) rather than for E(Y | x) directly. The quantity β0 + β1 x
is called the linear predictor. If β1 > 0, then as x → +∞, θ → 1 and as x → −∞,
θ → 0. If β1 < 0 the situation is reversed. β0 is like an intercept; it controls how far
to the left or right the curve is. β1 is like a slope; it controls how quickly the curve
moves between its two asymptotes.
Logistic regression and, indeed, all generalized linear models differ from linear
regression in two ways: the regression function is nonlinear and the distribution of
Y | x is not Normal. These differences imply that the methods we used to analyze
linear models are not correct for generalized linear models. We need to derive the
likelihood function and find new calculational algorithms.
The likelihood function is derived from first principles.
p(Y1 , . . . , Yn | x1 , . . . , xn , β0 , β1 ) =
Y
=
Y
p(Yi | xi , β0 , β1 )
i
θiyi (1 − θi )1−yi
i
=
Y
i:yi =1
θi
Y
(1 − θi )
i:yi =0
Y
1
eβ0 +β1 xi
=
β
+β
x
β
0
1
i
1+e
1 + e 0 +β1 xi
i:y =0
i:y =1
Y
i
i
This is a rather complicated function of the two variables (β0 , β1 ). However, a
Central Limit Theorem applies to give a likelihood function for β0 and β1 that is
accurate when n is reasonable large. The theory is beyond the scope of this book,
but R will do the calculations for us. We illustrate with the pine cone data from
Example 3.8. Figure 3.15 shows the likelihood function.
242
0.15
0.20
0.25
0.30
!1
0.35
0.40
0.45
0.50
3.3. GENERALIZED LINEAR MODELS
!11 !10
!9
!8
!7
!6
!5
!4
!0
Figure 3.15: Likelihood function for the pine cone data
3.3. GENERALIZED LINEAR MODELS
243
Figure 3.15 was produced by the following snippet.
mature <- cones$X2000[ring1] > 0
b0 <- seq ( -11, -4, length=60 )
b1 <- seq ( .15, .5, length=60 )
lik <- matrix ( NA, 60, 60 )
for ( i in 1:60 )
for ( j in 1:60 ) {
linpred <- b0[i] + b1[j]*cones$dbh[ring1]
theta
<- exp(linpred) / (1+exp(linpred))
lik[i,j] <- prod ( theta^mature * (1-theta)^(1-mature) )
}
lik <- lik/max(lik)
contour ( b0, b1, lik, xlab=expression(beta[0]),
ylab=expression(beta[1]) )
• mature is an indicator variable for whether a tree has at least one pine cone.
• The lines b0 <- ... and b1 <- ... set some values of (β0 , β1 ) at which to
evaluate the likelihood. They were chosen after looking at the output from
fitting the logistic regression model.
• lik <- ... creates a matrix to hold values of the likelihood function.
• linpred is the linear predictor. Because cones$dbh[ring1] is a vector,
linpred is also a vector. Therefore theta is also a vector, as is thetaˆmature
* (1-theta)ˆ(1-mature). It will help your understanding of R to understand
what these vectors are.
One notable feature of Figure 3.15 is the diagonal slope of the contour ellipses.
The meaning is that we do not have independent information about β0 and β1 . For
example if we thought, for some reason, that β0 ≈ −9, then we could be fairly
confident that β1 is in the neighborhood of about .4 to about .45. But if we thought
β0 ≈ −6, then we would believe that β1 is in the neighborhood of about .25 to
about .3. More generally, if we knew β0 , then we could estimate β1 to within
a range of about .05. But since we don’t know β0 , we can only say that β1 is
likely to be somewhere between about .2 and .6. The dependent information for
(β0 , β1 ) means that our marginal information for β1 is much less precise than our
3.3. GENERALIZED LINEAR MODELS
244
conditional information for β1 given β0 . That imprecise marginal information is
reflected in the output from R, shown in the following snippet which fits the model
and summarizes the result.
cones <- read.table ( "data/pinecones.dat", header=T )
ring1 <- cones$ring == 1
mature <- cones$X2000[ring1] > 0
fit <- glm ( mature ~ cones$dbh[ring1], family=binomial )
summary ( fit )
...
Coefficients:
Estimate Std. Error z value Pr(>|z|)
(Intercept)
-7.46684
1.76004 -4.242 2.21e-05 ***
cones$dbh[ring1] 0.36151
0.09331
3.874 0.000107 ***
...
• cones ... reads in the data. There is one line for each tree. The first few
lines look like this.
ring
ID xcoor ycoor spec dbh X1998
1
1 11003 0.71 0.53 pita 19.4
2
1 11004 1.26 2.36 pita 14.1
3
1 11011 1.44 6.16 pita 19.4
X1999
0
0
0
X2000
0
0
0
4
6
0
ID is a unique identifying number for each tree; xcoor and ycoor are coordinates in the plane; spec is the species; pita stands for pinus taeda or loblolly
pine, X1998, X1999 and X2000 are the numbers of pine cones each year.
• ring1 ... is an indicator variable for trees in Ring 1.
• mature ... indicates whether the tree had any cones at all in 2000. It is not
a precise indicator of maturity.
• fit ... fits the logistic regression. glm fits a generalized linear model. The
argument family=binomial tells R what kind of data we have. In this case
it’s binomial because y is either a success or failure.
3.3. GENERALIZED LINEAR MODELS
245
• summary(fit) shows that (β̂0 , β̂1 ) ≈ (−7.5, 0.36). The SD’s are about 1.8 and
.1. These values guided the choice of b0 and b1 in creating Figure 3.15. It’s
the SD of about .1 that says we can estimate β1 to within an interval of about
.4, or about ±2SD’s.
3.3.2
Poisson Regression
Section 3.3.1 dealt with the case where the response variable Y was Bernoulli.
Another common situation is where the response Y is a count. In that case it is
natural to adopt, at least provisionally, a model in which Y has a Poisson distribution: Y ∼ Poi(λ). When there are covariates X, then λ may depend on X. It is
common to adopt the regression
log λ = β0 + β1 x
(3.21)
Model 3.21 is another example of a generalized linear model. Example 3.10 illustrates its use.
Example 3.10 (Seedlings, continued)
Several earlier examples have discussed data from the Coweeta LTER on the emergence
and survival of red maple (acer rubrum) seedlings. Example 3.2 showed that the arrival
rate of seedlings seemed to vary by quadrat. Refer especially to Figure 3.4. Example 3.10
follows up that observation more quantitatively.
Roughly speaking, New seedlings arise in a two-step process. First, a seed falls out
of the sky, then it germinates and emerges from the ground. We may reasonably assume
that the emergence of one seedling does not affect the emergence of another (They’re
too small to interfere with each other.) and hence that the number of New seedlings
has a Poi(λ) distribution. Let Yij be the number of New seedlings observed in quadrat i
and year j. Here are two fits in R, one in which λ varies by quadrat and one in which it
doesn’t.
new <- data.frame ( count=count,
quadrat=as.factor(quadrat),
year=as.factor(year)
)
fit0 <- glm ( count ~ 1, family=poisson, data=new )
fit1 <- glm ( count ~ quadrat, family=poisson, data=new )
• The command data.frame creates a dataframe. R describes dataframes as
3.3. GENERALIZED LINEAR MODELS
246
“tightly coupled collections of variables which share many of the properties of matrices and of lists, used as the fundamental data structure
by most of R’s modeling software.”
We created a dataframe called new, having three columns called count, quadrat,
and year. Each row of new contains a count (of New seedlings), a quadrat number
and a year. There are as many rows as there are observations.
• The command as.factor turns its argument into a factor. That is, instead
of treating quadrat and year as numerical variables, we treat them as indicator
variables. That’s because we don’t want a quadrat variable running from 1 to
60 implying that the 60th quadrat has 60 times as much of something as the 1st
quadrat. We want the quadrat numbers to act as labels, not as numbers.
• glm stands for generalized linear model. The family=poisson argument says
what kind of data we’re modelling. data=new says the data are to be found in a
dataframe called new.
• The formula count ˜ 1 says to fit a model with only an intercept, no covariates.
• The formula count ˜ quadrat says to fit a model in which quadrat is a covariate.
Of course that’s really 59 new covariates, indicator variables for 59 of the 60
quadrats.
To examine the two fits and see which we prefer, we plotted actual versus fitted
values and residuals versus fitted values in Figure 3.16. Panels (a) and (b) are from
fit0. Because there may be overplotting, we jittered the points and replotted them
in panels (c) and (d). Panels (e) and (f) are jittered values from fit1. Comparison
of panels (c) to (e) and (d) to (f) shows that fit1 predicts more accurately and has
smaller residuals than fit0. That’s consistent with our reading of Figure 3.4. So we
prefer fit1.
Figure 3.17 continues the story. Panel (a) shows residuals from fit1 plotted against
year. There is a clear difference between years. Years 1, 3, and 5 are high while years 2
and 4 are low. So perhaps we should use year as a predictor. That’s done by
fit2 <- glm ( count ~ quadrat+year, family=poisson,
data=new )
Panels (b) and (c) show diagnostic plots for fit2. Compare to similar panels in Figure 3.16 to see whether using year makes an appreciable difference to the fit.
3.3. GENERALIZED LINEAR MODELS
247
(b)
6
4
0
2
residuals
10
5
0
actual values
15
8
(a)
0.8
1.0
1.2
0.6
1.0
fitted values
fitted values
(c)
(d)
1.2
4
0
2
residuals
6
15
10
5
0
actual values
0.8
8
0.6
0.865 0.875 0.885 0.895
0.865 0.875 0.885 0.895
fitted values
(e)
(f)
3
1
!3
!1
residuals
10
5
0
actual values
15
fitted values
0
1
2
3
fitted values
4
5
0
1
2
3
4
5
fitted values
Figure 3.16: Actual vs. fitted and residuals vs. fitted for the New seedling data. (a)
and (b): fit0. (c) and (d): jittered values from fit0. (e) and (f): jittered values
from fit1.
3.3. GENERALIZED LINEAR MODELS
Figure 3.16 was created with the following snippet.
par ( mfrow=c(3,2) )
plot ( fitted(fit0), new$count, xlab="fitted values",
ylab="actual values", main="(a)" )
abline ( 0, 1 )
plot ( fitted(fit0), residuals(fit0), xlab="fitted values",
ylab="residuals", main="(b)" )
plot ( jitter(fitted(fit0)), jitter(new$count),
xlab="fitted values", ylab="actual values",
main="(c)" )
abline ( 0, 1 )
plot ( jitter(fitted(fit0)), jitter(residuals(fit0)),
xlab="fitted values", ylab="residuals", main="(d)" )
plot ( jitter(fitted(fit1)), jitter(new$count),
xlab="fitted values", ylab="actual values",
main="(e)" )
abline ( 0, 1 )
plot ( jitter(fitted(fit1)), jitter(residuals(fit1)),
xlab="fitted values", ylab="residuals", main="(f)" )
The following snippet shows how Figure 3.17 was made in R.
par ( mfrow=c(2,2) )
plot ( new$year, residuals(fit1),
xlab="year", ylab="residuals", main="(a)" )
plot ( jitter(fitted(fit2)), jitter(new$count),
xlab="fitted values", ylab="actual values",
main="(b)" )
abline ( 0, 1 )
plot ( jitter(fitted(fit2)), jitter(residuals(fit2)),
xlab="fitted values", ylab="residuals", main="(c)" )
248
3.3. GENERALIZED LINEAR MODELS
249
(b)
10
0
5
actual values
1
0
!1
!3
residuals
2
3
15
4
(a)
1
2
3
4
year
5
0 2 4 6 8
fitted values
0
!1
!3
!2
residuals
1
2
3
(c)
0 2 4 6 8
fitted values
Figure 3.17: New seedling data. (a): residuals from fit1 vs. year. (b): actual vs.
fitted from fit2. (c): residuals vs. fitted from fit2.
3.4. PREDICTIONS FROM REGRESSION
3.4
250
Predictions from Regression
From a regression equation, if we have estimates of the β’s we can
1. plug in the values of the x’s we have to get fitted values, and
2. plug in the values of x for new or future cases to get predicted values.
We illustrate with the mtcars data.
Example 3.11 (mtcars, continued)
Example 3.7 concluded with a comparison of three models for mpg. Here we continue
that comparison by seeing whether the models make substantially different predictions
for any of the cars in the data set. For each car we know its weight and horsepower and
we have estimates of all the parameters in Equations 3.17, 3.18, and 3.19, so we can
compute its fitted values from all three models. In symbols,
ŷi = β̂0 + β̂1 wti
ŷi = γ̂0 + γ̂1 hpi
(from 3.17)
(from 3.18)
ŷi = δ̂0 + δ̂1 wti + δ̂2 hpi
(from 3.19)
We plot the fitted values against each other to see whether there are any noticable
differences. Figure 3.18 displays the result. Figure 3.18 shows that the mpg.fit1 and
mpg.fit3 produce fitted values substantially similar to each other and agreeing fairly well
with actual values, while mpg.fit2 produces fitted values that differ somewhat from the
others and from the actual values, at least for a few cars. This is another reason to prefer
mpg.fit1 and mpg.fit3 to mpg.fit2. In Example 3.7 this lack of fit showed up as a
higher σ̂ for mpg.fit2 than for mpg.fit1.
Figure 3.18 was made with the following snippet.
fitted.mpg <- cbind ( fitted(mpg.fit1), fitted(mpg.fit2),
fitted(mpg.fit3), mtcars$mpg )
pairs ( fitted.mpg, labels = c ( "fitted from wt",
"fitted from hp", "fitted from both", "actual mpg" ) )
• fitted(xyz) extracts fitted values. xyz can be any model previously fitted by lm,
glm, or other R functions to fit models.
3.4. PREDICTIONS FROM REGRESSION
20
10
20
30
20
25
30
10
251
20
25
10
15
fitted from wt
20
25
30
10
15
fitted from hp
25
30
10
15
fitted from both
10
15
20
actual mpg
10
20
30
10
20
30
Figure 3.18: Actual mpg and fitted values from three models
3.4. PREDICTIONS FROM REGRESSION
252
In Example 3.5 we posited model 3.10:
y = β0 + β1 x + (3.22)
where x was mean temperature during the week and y was ice cream consumption
during the week. Now we want to fit the model to the data and use the fit to predict
consumption. In addition, we want to say how accurate the predictions are. Let xf
be the predicted mean temperature for some future week and yf be consumption.
xf is known; yf is not. Our model says
yf ∼ N(µf , σ)
where
µf = β0 + β1 xf
µf is unknown because β0 and β1 are unknown. But (β0 , β1 ) can be estimated from
the data, so we can form an estimate
µ̂f = β̂0 + β̂1 xf
How accurate is µ̂f as an estimate of µf ? The answer depends on how accurate
(β̂0 , β̂1 ) are as estimates of (β0 , β1 ). Advanced theory about Normal distributions,
beyond the scope of this book, tells us
µ̂f ∼ N(µf , σfit )
for some σfit which may depend on xf ; we have omitted the dependency from the
notation.
µf is the average ice cream consumption in all weeks whose mean temperature
is xf . So µ̂f is also an estimator of yf . But in any particular week the actual
consumption won’t exactly equal µf . Our model says
y f = µf + where ∼ N(0, σ). So in any given week yf will differ from µf by an amount up to
about ±2σ or so.
Thus the uncertainty σfit in estimating yf has two components: (1) the uncertainty of µf which comes because we don’t know (β0 , β1 ) and (2) the variability σ
due to . We can’t say in advance which component will dominate. Sometimes it
will be the first, sometimes the second. What we can say is that as we collect more
and more data, we learn (β0 , β1 ) more accurately, so the first component becomes
negligible and the second component dominates. When that happens, we won’t go
far wrong by simply ignoring the first component.
3.5. EXERCISES
3.5
253
Exercises
1. (a) Use the attenu , airquality and faithful datasets to reproduce Figures 3.1 (a), (b) and (d).
(b) Add lowess and supsmu fits.
(c) Figure out how to use the tuning parameters and try out several different
values. (Use the help or help.start functions.)
2. With the mtcars dataset, use a scatterplot smoother to plot the relationship
between weight and displacement. Does it matter which we think of as X
and which as Y ? Is one way more natural than the other?
3. Download the 1970 draft data from DASL and reproduce Figure 3.3. Use the
tuning parameters (f for lowess; span for supsmu) to draw smoother and
wigglier scatterplot smoothers.
4. How could you test whether the draft numbers in Example 3.1 were generated uniformly? What would H0 be? What would be a good test statistic w?
How would estimate the distribution of w under H0 ?
5. Using the information in Example 3.6 estimate the mean calorie content of
meat and poultry hot dogs.
6. Refer to Examples 2.2, 3.4, and 3.6.
(a) Formulate statistical hypotheses for testing whether the mean calorie
content of Poultry hot dogs is equal to the mean calorie content of Beef
hot dogs.
(b) What statistic will you use?
(c) What should that statistic be if H0 is true?
(d) How many SD’s is it off?
(e) What do you conclude?
(f) What about Meat hot dogs?
7. Refer to Examples 2.2, 3.4, and 3.6. Figure 3.5 shows plenty of overlap in
the calorie contents of Beef and Poultry hot dogs. I.e., there are many Poultry
hot dogs with more calories than many Beef hot dogs. But Figure 3.9 shows
very little support for values of δP near 0. Can that be right? Explain?
3.5. EXERCISES
254
8. Examples 2.2, 3.4, and 3.6 analyze the calorie content of Beef, Meat, and
Poultry hot dogs. Create a similar analysis, but for sodium content. Your
analysis should cover at least the following steps.
(a) A stripchart similar to Figure 3.5 and density estimates similar to Figure 3.6.
(b) A model similar to Model 3.4, including definitions of the parameters.
(c) Indicator variables analogous to those in Equation 3.6.
(d) A model similar to Model 3.7, including definitions of all the terms.
(e) A fit in R, similar to that in Example 3.6.
(f) Parameter estimates and SD’s.
(g) Plots of likelihood functions, analagous to Figure 3.9.
(h) Interpretation.
9. Analyze the PlantGrowth data from page 214. State your conclusion about
whether the treatments are effective. Support you conclusion with analysis.
10. Analyze the Ice Cream data from Example 3.5. Write a model similar to
Model 3.7, including definitions of all the terms. Use R to fit the model.
Estimate the coefficients and say how accurate your estimates are. If temperature increases by about 5 ◦ F, about how much would you expect ice cream
consumption to increase? Make a plot similar to Figure 3.8, but add on the
line implied by Equation 3.10 and your estimates of β0 and β1 .
11. Verify the claim that for Equation 3.18 γ̂0 ≈ 30, γ̂1 ≈ −.07 and σ̂ ≈ 3.9.
12. Does a football filled with helium travel further than one filled with air?
DASL has a data set that attempts to answer the question. Go to DASL, http:
//lib.stat.cmu.edu/DASL, download the data set Helium football and read
the story. Use what you know about linear models to analyze the data and
reach a conclusion. You must decide whether to include data from the first
several kicks and from kicks that appear to be flubbed. Does your decision
affect your conclusion?
13. Use the PlantGrowth data from R. Refer to page 214 and Equation 3.5.
(a) Estimate µC , µT 1 , µT 2 and σ.
(b) Test the hypothesis µT 1 = µC .
3.5. EXERCISES
255
(c) Test the hypothesis µT 1 = µT 2 .
14. Jack and Jill, two Duke sophomores, have to choose their majors. They both
love poetry so they might choose to be English majors. Then their futures
would be full of black clothes, black coffee, low paying jobs, and occasional
volumes of poetry published by independent, non-commercial presses. On
the other hand, they both see the value of money, so they could choose to be
Economics majors. Then their futures would be full of power suits, double
cappucinos, investment banking and, at least for Jack, membership in the
Augusta National golf club. But which would make them more happy?
To investigate, they conduct a survey. Not wanting to embarass their friends
and themselves, Jack and Jill go up Chapel Hill to interview poets and investment bankers. In all of Chapel Hill there are 90 poets but only 10 investment
bankers. J&J interview them all. From the interviews J&J compute the Happiness Quotient or HQ of each subject. The HQ’s are in Figure 3.19. J&J also
record two indicator variables for each person: Pi = 1 or 0 (for poets and
bankers); Bi = 1 or 0 (for bankers and poets).
Jill and Jack each write a statistical model:
Jill: HQi = α0 + α1 Pi + i
Jack: HQi = β1 Pi + β2 Bi + i
(a) Say in words what are α0 , α1 , β1 and β2 .
(b) Express β1 and β2 in terms of α0 and α1 .
(c) In their data set J&J find HQ = 43 among poets, HQ = 44 among
bankers and σ̂ 2 = 1. (Subjects report disappointment with their favorite
basketball team as the primary reason for low HQ.) Find sensible numerical estimates of α0 , α1 , β1 and β2 .
15. Is poverty related to academic performance in school? The file
schools_poverty
at this text’s website contains relevant data from the Durham, NC school
system in 2001. The first few lines are
1
2
3
pfl eog type
66 65
e
32 73
m
65 65
e
256
b
p
3.5. EXERCISES
39
40
41
42
43
44
45
HQ
Figure 3.19: Happiness Quotient of bankers and poets
3.5. EXERCISES
257
Each school in the Durham public school system is represented by one line
in the file. The variable pfl stands for percent free lunch. It records the
percentage of the school’s student population that qualifies for a free lunch
program. It is an indicator of poverty. The variable eog stands for end of
grade. It is the school’s average score on end of grade tests and is an indicator
of academic success. Finally, type indicates the type of school — e, m, or h
for elementary, middle or high school, respectively. You are to investigate
whether pfl is predictive of eog.
(a) Read the data into R and plot it in a sensible way. Use different plot
symbols for the three types of schools.
(b) Does there appear to be a relationship between pfl and eog? Is the
relationship the same for the three types of schools? Decide whether the
rest of your analysis should include all types of schools, or only one or
two.
(c) Using the types of schools you think best, remake the plot and add a
regression line. Say in words what the regression line means.
(d) During the 2000-2001 school year Duke University, in Durham, NC,
sponsored a tutoring program in one of the elementary schools. Many
Duke students served as tutors. From looking at the plot, and assuming
the program was successful, can you figure out which school it was?
16. Load mtcars into an R session. Use R to find the m.l.e.’s (β̂0 , β̂1 ). Confirm
that they agree with the line drawn in Figure 3.11(a). Starting from Equation 3.17, derive the m.l.e.’s for β0 and β1 .
17. Get more current data similar to mtcars. Carry out a regression analysis
similar to Example 3.7. Have relationships among the variables changed over
time? What are now the most important predictors of mpg?
18. Repeat the logistic regression of am on wt, but use hp instead of wt.
19. A researcher randomly selects cities in the US. For each city she records the
number of bars yi and the number of churches zi . In the regression equation
zi = β0 + β1 yi do you expect β1 to be positive, negative, or around 0?
20. Jevons’ coins?
21. (a) Jane writes the following R code:
3.5. EXERCISES
258
x <- runif ( 60, -1, 1 )
Describe x. Is it a number, a vector, or a matrix? What is in it?
(b) Now she writes
y <- x + rnorm ( 60 )
myfit <- lm ( y ~ x )
Make an intelligent guess of what she found for β̂0 and β̂1 .
(c) Using advanced statistical theory she calculates
SD(β̂0 ) = .13
SD(β̂1 ) = .22
Finally she writes
in0 <- 0
in1 <- 0
for ( i in 1:100 ) {
x <- runif ( 60, -1, 1 )
y <- x + rnorm ( 60 )
fit <- lm ( y ~ x )
if ( abs(fit$coef[1]) <= .26 ) in0 <- in0 + 1
if ( abs(fit$coef[2]-1) <= .44 ) in1 <- in1 + 1
}
Make an intelligent guess of in0 and in1 after Jane ran this code.
22. The Army is testing a new mortar. They fire a shell up at an angle of 60◦ and
track its progress with a laser. Let t1 , t2 , . . . , t100 be equally spaced times from
t1 = (time of firing) to t100 = (time when it lands). Let y1 , . . . , y100 be the
shell’s heights and z1 , . . . , z100 be the shell’s distance from the howitzer (measured horizontally along the ground) at times t1 , t2 , . . . , t100 . The yi ’s and zi ’s
are measured by the laser. The measurements are not perfect; there is some
measurement error. In answering the following questions you may assume
that the shell’s horizontal speed remains constant until it falls to ground.
3.5. EXERCISES
259
(a) True or False: The equation
yi = β0 + β1 ti + i
should fit the data well.
(b) True or False: The equation
yi = β0 + β1 ti + β2 t2i + i
(3.23)
should fit the data well.
(c) True or False: The equation
zi = β0 + β1 ti + i
(3.24)
should fit the data well.
(d) True or False: The equation
zi = β0 + β1 ti + β2 t2i + i
(3.25)
should fit the data well.
(e) True or False: The equation
yi = β0 + β1 zi + i
(3.26)
should fit the data well.
(f) True or False: The equation
yi = β0 + β1 zi + β2 zi2 + i
(3.27)
should fit the data well.
(g) Approximately what value did the Army find for β̂0 in Part (b)?
(h) Approximately what value did the Army find for β̂2 in Part (d)?
23. Some nonstatisticians (not readers of this book, we hope) do statistical analyses based almost solely on numerical calculations and don’t use plots. R
comes with the data set anscombe which demonstrates the value of plots.
Type data(anscombe) to load the data into your R session. It is an 11 by 8
dataframe. The variable names are x1, x2, x3, x4, y1, y2, y3, and y4.
3.5. EXERCISES
260
(a) Start with x1 and y1. Use lm to model y1 as a function of x1. Print a
summary of the regression so you can see β̂0 , β̂1 , and σ̂.
(b) Do the same for the other pairs: x2 and y2, x3 and y3, x4 and y4.
(c) What do you conclude so far?
(d) Plot y1 versus x1. Repeat for each pair. You may want to put all four
plots on the same page. (It’s not necessary, but you should know how to
draw the regression line on each plot. Do you?)
(e) What do you conclude?
(f) Are any of these pairs well described by linear regression? How would
you describe the others? If the others were not artificially constructed
data, but were real, how would you analyze them?
24. Here’s some R code:
x <- rnorm ( 1, 2, 3 )
y <- -2*x + 1 + rnorm ( 1, 0, 1 )
(a) What is the marginal distribution of x?
(b) Write down the marginal density of x.
(c) What is the conditional distribution of y given x?
(d) Write down the conditional density of y given x.
(e) Write down the joint density of (x,y).
Here’s more R code:
N.sim <- 1000
w <- rep ( NA, N.sim )
for ( i in 1:N.sim ) {
x <- rnorm ( 50, 2, 3 )
y <- -2*x + 1 + rnorm ( 50, 0, 1 )
fit <- lm ( y ~ x )
w[i] <- fit$coef[2]
}
z1 <- mean ( w )
z2 <- sqrt ( var ( w + 2 ) )
3.5. EXERCISES
261
What does z1 estimate? What does z2 estimate?
25. A statistician thinks the regression equation yi = β0 + β1 xi + i fits her data
well. She would like to learn β1 . She is able to measure the yi ’s accurately but
can measure the xi ’s only approximately. In fact, she can measure wi = xi + δi
where δi ∼ N(0, .1). So she can fit the regression equation yi = β0∗ + β1∗ wi + ∗i .
Note that (β0∗ , β1∗ ) might be different than (β0 , β1 ) because they’re for the wi ’s,
not the xi ’s. So the statistician writes the following R code.
N.sim <- 1000
b.0 <- -10:10
b.1 <- -10:10
n <- 50
for ( i in 1:21 )
for ( j in 1:21 ) {
val <- rep ( NA, N.sim )
for ( k in 1:N.sim ) {
x <- rnorm ( n )
w <- x + rnorm ( n, 0, sqrt(.1) )
y <- b.0[i] + x * b.1[j] + rnorm ( n, 3 )
fit <- lm ( y ~ w )
val[k] <- fit$coef[2]
}
m <- mean ( val )
sd <- sqrt ( var ( val ) )
print ( c ( m, sd, (m-b.1[j])/sd ) )
}
What is she trying to do? The last time through the loop, the print statement
yields [1] 9.086723 0.434638 -2.101237. What does this show?
26. The purpose of this exercise is to familiarize yourself with plotting logistic
regression curves and getting a feel for the meaning of β0 and β1 .
(a) Choose some values of x. You will want between about 20 and 100
evenly spaced values. These will become the abscissa of your plot.
(b) Choose some values of β0 and β1 . You are trying to see how different
values of the β’s affect the curve. So you might begin with a single value
of β1 and several values of β0 , or vice versa.
3.5. EXERCISES
262
(c) For each choice of (β0 , β1 ) calculate the set of θi = eβ0 +β1 xi /(1 + eβ0 +β1 xi )
and plot θi versus xi . You should get sigmoidal shaped curves. These are
logistic regression curves.
(d) You may find that the particular x’s and β’s you chose do not yield a
visually pleasing result. Perhaps all your θ’s are too close to 0 or too
close to 1. In that case, go back and choose different values. You will
have to play around until you find x’s and β’s compatible with each
other.
27. Carry out a logistic regression analysis of the O-ring data. What does your
analysis say about the probability of O-ring damage at 36◦ F, the temperature
of the Challenger launch. How relevant should such an analysis have been to
the decision of whether to postpone the launch?
28. This exercise refers to Example 3.10.
(a) Why are the points lined up vertically in Figure 3.16, panels (a) and (b)?
(b) Why do panels (c) and (d) appear to have more points than panels (a)
and (b)?
(c) If there were no jittering, how many distinct values would there be on
the abscissa of panels (c) and (d)?
(d) Download the seedling data. Fit a model in which year is a predictor but
quadrat is not. Compare to fit1. Which do you prefer? Which variable
is more important: quadrat or year? Or are they both important?
C HAPTER 4
M ORE P ROBABILITY
4.1
More Probability Density
Section 1.2 on page 6 introduced probability densities. Section 4.1 discusses them
further and gives a formal definition.
Let X be a continuous random
variable with cdf FX . Theorem 1.2 on page 8
d
implies that fX (x) = db FX (b) b=x and therefore that we can define the pdf by
d
fX (x) ≡ FX0 (x) = db
FX (b)b=x . In fact, this definition is a little too restrictive. The
key property of pdf’s is that the probability of a set A is given by the integral of the
pdf. I.e.,
Z
P[X ∈ A] =
fX (x) dx
A
But if f ∗ isRa function
R that differs from fX at only countably many points then, for
any set A, A f ∗ = A fX , so we could just as well have defined
Z
P[X ∈ A] =
f ∗ (x) dx
A
There are infinitely many functions having the same integrals as fX and f ∗ . These
functions differ from each other on “sets of measure zero”, terminology beyond our
scope but defined in books on measure theory. For our purposes we can think of
sets of measure zero as sets containing at most countably many points. In effect,
the pdf of X can be arbitrarily changed on sets of measure zero. It does not matter
which of the many equivalent functions we use as the probability density of X.
Thus, we define
263
4.2. RANDOM VECTORS
264
Definition 4.1. Any function f such that, for all intervals A,
Z
f (x) dx
P[X ∈ A] =
A
is called a probability density function, or pdf, for the random variable X. Any such
function may be denoted fX .
Definition 4.1 can be used in an alternate proof of Theorem 1.1 on page 12.
The central step in the proof is just a change-of-variable in an integral, showing
that Theorem 1.1 is, in essence, just a change of variables. For convenience we
restate the theorem before reproving it.
Theorem 1.1 Let X be a random variable with pdf pX . Let g be a differentiable,
monotonic, invertible function and define Z = g(X). Then the pdf of Z is
−1 d g (t) −1
pZ (t) = pX (g (t)) dt R
Proof. For any set A, P[Z ∈ g(A)] = P[X ∈ A] = A pX (x) dx. Let z = g(x) and
change variables in the integral to get
Z
dx −1
pX (g (z)) dz
P[Z ∈ g(A)] =
dz
g(A)
R
I.e., P[Z ∈ g(A)] = g(A) something dz. Therefore something must be pZ (z). Hence,
pZ (z) = pX (g −1 (z))|dx/dz|.
4.2
Random Vectors
It is often useful, even essential, to talk about several random variables simultaneously. We have seen many examples throughout the text beginning with Section 1.5
on joint, marginal, and conditional probabilities. Section 4.2 reviews the basics and
sets out new probability theory for multiple random variables.
Let X1 , . . . , Xn be a set of n random variables. The n-dimensional vector
~ = (X1 , . . . , Xn ) is called a multivariate random variable or random vector. As
X
~ has a pdf or pmf, a cdf, an expected value, and a covariance
explained below, X
matrix, all analogous to univariate random variables.
4.2. RANDOM VECTORS
4.2.1
265
Densities of Random Vectors
~ has a pdf, written
When X1 , . . . , Xn are continuous then X
pX~ (x1 , . . . , xn ).
As in the univariate case, the pdf is any function whose integral yields probabilities.
That is, if A is a region in Rn then
Z
Z
~
P[X ∈ A] = · · · pX~ (x1 , · · · , xn ) dx1 . . . dxn
A
~ = (X1 , X2 ) and
For example, let X1 ∼ Exp(1); X2 ∼ Exp(1/2); X1 ⊥ X2 ; and X
suppose we want to find P[|X1 − X2 | ≤ 1]. Our plan for solving this problem is to
find the joint density pX~ , then integrate pX~ over the region A where |X1 − X2 | ≤ 1.
Because X1 ⊥ X2 , the joint density is
1
pX~ (x1 , x2 ) = pX1 (x1 )pX2 (x2 ) = e−x1 × e−x2 /2
2
To find the region A over which to integrate, it helps to plot the X1 -X2 plane.
Making the plot is left as an exercise.
ZZ
P[|X1 − X2 | ≤ 1] =
1
=
2
Z
1
Z
pX~ (x1 , x2 ) dx1 dx2
A
x1 +1
e
0
0
−x1 −x2 /2
e
1
dx2 dx1 +
2
Z
1
∞
Z
x1 +1
e−x1 e−x2 /2 dx2 dx1
x1 −1
≈ 0.47 (4.1)
The random variables (X1 , . . . , Xn ) are said to be mutually independent or jointly
independent if
pX~ (x1 , . . . , xn ) = pX1 (x1 ) × · · · × pXn (xn )
for all vectors (x1 , . . . , xn ).
Mutual independence implies pairwise independence. I.e., if (X1 , . . . , Xn ) are
mutually independent, then any pair (Xi , Xj ) are also independent. The proof
is left as an exercise. It is curious but true that pairwise independence does not
imply joint independence. For an example, consider the discrete three-dimensional
4.2. RANDOM VECTORS
266
~ = (X1 , X2 , X3 ) with
distribution on X
P[(X1 , X2 , X3 ) = (0, 0, 0)]
= P[(X1 , X2 , X3 ) = (1, 0, 1)]
= P[(X1 , X2 , X3 ) = (0, 1, 1)]
= P[(X1 , X2 , X3 ) = (1, 1, 0)] = 1/4
(4.2)
It is easily verified that X1 ⊥ X2 , X1 ⊥ X3 , and X2 ⊥ X3 but that X1 , X2 , and X3
are not mutually independent. See Exercise 6.
4.2.2
Moments of Random Vectors
~ is a random vector, its expected value is also a vector.
When X
~ ≡ (E[X1 ], . . . , E[Xn ])
E[X]
~ ≡ (X1 , . . . , Xn ) is a random vector, instead of a variance it has a covariance
When X
matrix. The ij’th entry of the covariance matrix is Cov(Xi , Xj ). The notation is
σ12 σ12 · · · σ1n
σ12 σ 2 · · · σ2n
2
~
Cov(X) ≡ ΣX~ = ..
.. . .
..
.
. .
.
σ1n σ2n · · · σn2
where σij = Cov(Xi , Xj ) and σi2 = Var(Xi ). Sometimes σi2 is also denoted σii .
4.2.3
Functions of Random Vectors
Section 4.2.3 considers functions of random vectors. If g is an arbitrary function
~ to R then
that maps X
Z
Z
~
E[g(X)] = · · · g(x1 , . . . , xn )pX~ (x1 , . . . , xn ) dx1 · · · dxn
~ When g is a linear
but it’s hard to say much in general about the variance of g(X).
function we can go farther, but first we need a lemma.
Lemma 4.1. Let X1 and X2 be random variables and Y = X1 + X2 . Then
1. E[Y ] = E[X1 ] + E[X2 ]
4.2. RANDOM VECTORS
267
2. Var(Y ) = Var(X1 ) + Var(X2 ) + 2 Cov(X1 , X2 )
Proof. Left as exercise.
Now we can deal with linear combinations of random vectors.
~ =
Theorem
4.2. Let ~a = (a1 , . . . , an ) be an n-dimensional vector and define Y = ~at X
P
ai Xi . Then,
1. E[Y ] = E[
P
2. Var(Y ) =
P
ai X i ] =
P
ai E[Xi ]
Pn−1 Pn
a2i Var(Xi ) + 2 i=1
at ΣX~ ~a
j=i+1 ai aj Cov(Xi , Xj ) = ~
Proof. Use Lemma 4.1 and Theorems 1.3 (pg. 39) and 1.4 (pg. 40). See Exercise 8.
The next step is to consider several linear combinations simultaneously. For
some k ≤ n, and for each i = 1, . . . , k, let
X
~
Yi = ai1 X1 + · · · ain Xn =
aij Xj = ~ati X
j
where the aij ’s are arbitrary constants and ~ai = (ai1 , . . . , ain ). Let Y~ = (Y1 , . . . , Yk ).
In matrix notation,
~
Y~ = AX
where A is the k × n matrix of elements aij . Covariances of the Yi ’s are given by
~ ~at X)
~
Cov(Yi , Yj ) = Cov(~ati X,
j
n X
n
X
=
Cov(aik Xk , aj` Xj )
k=1 `=1
=
=
n
X
aik ajk σk2 +
k=1
~ati ΣX~ ~aj
n−1 X
n
X
(aik aj` + ajk ai` )σk`
k=1 `=k+1
Combining the previous result with Theorem 4.2 yields Theorem 4.3.
~ be a random vector of dimension n with mean E[X]
~ = µ and
Theorem 4.3. Let X
~
~
covariance matrix Cov(X) = Σ; let A be a k × n matrix of rank k; and let Y~ = AX.
Then
4.2. RANDOM VECTORS
268
1. E[Y~ ] = Aµ, and
2. Cov(Y~ ) = AΣA0
Finally, we take up the question of multivariate transformations, extending
~ = (X1 , . . . , Xn ) be an nthe univariate version, Theorem 1.1 (pg. 12). Let X
dimensional continuous random vector with pdf fX~ . Define a new n-dimensional
~ . . . , gn (X))
~ where the gi ’s are differenrandom vector Y~ = (Y1 , . . . , Yn ) = (g1 (X),
~ 7→ Y~ is invertible. What is
tiable functions and where the the transformation g : X
fY~ , the pdf of Y~ ?
Let J be the so-called Jacobian matrix of partial derivatives.
∂Y1
∂Y1
· · · ∂X
∂X1
n
∂Y2 · · · ∂Y2
∂X
∂Xn
J = .1 .
..
.
.
.
.
.
∂Yn
∂X1
···
∂Yn
∂Xn
and |J| be the absolute value of the determinant of J.
Theorem 4.4.
fY~ (~y ) = fX~ (g −1 (y))|J|−1
Proof. The proof follows the alternateRproof
R of Theorem 1.1 on page 264. For any
~
~
set A, P[Y ∈ g(A)] = P[X ∈ A] = ··· A pX~ (~x) dx1 · · · dxn . Let ~y = g(~x) and
change variables in the integral to get
Z
Z
~
P[Y ∈ g(A)] = · · ·
pX~ (g −1 (~y )) |J|−1 dy1 · · · dyn
g(A)
R
R
I.e., P[Y~ ∈ g(A)] = ··· g(A) something dy1 · · · dyn . Therefore something must be
pY~ (~y ). Hence, pY~ (~y ) = pX~ (g −1 (~y ))|J|−1 .
To illustrate the use of Theorem 4.4 we solve again an example previously given
on page 265, which we restate here. Let X1 ∼ Exp(1); X2 ∼ Exp(2); X1 ⊥ X2 ;
~ = (X1 , X2 ) and suppose we want to find P[|X1 − X2 | ≤ 1]. We solved this
and X
~ = (X1 , X2 ), then integrating
problem previously by finding the joint density of X
over the region where |X1 − X2 | ≤ 1. Our strategy this time is to define new
variables Y1 = X1 − X2 and Y2 , which is essentially arbitrary, find the joint density
of Y~ = (Y1 , Y2 ), then integrate over the region where |Y1 | ≤ 1. We define Y1 =
X1 − X2 because that’s the variable we’re interested in. We need a Y2 because
4.2. RANDOM VECTORS
269
Theorem 4.4 is for full rank transformations from Rn to Rn . The precise definition
~ to Y~ is differentiable
of Y2 is unimportant, as long as the transformation from X
and invertible. For convenience, we define Y2 = X2 . With these definitions,
∂Y1 ∂Y1 1
−1
∂X2
1
=
J = ∂X
∂Y2
∂Y2
0 1
∂X1
∂X2
|J| = 1
X1 = Y1 + Y2
and
X2 = Y2
From the solution on page 265 we know pX~ (x1 , x2 ) = e−x1 × 12 e−x2 /2 , so pY~ (y1 , y2 ) =
e−(y1 +y2 ) × 21 e−y2 /2 = 21 e−y1 e−3y2 /2 . Figure 4.1 shows the region over which to integrate.
ZZ
P[|X1 − X2 | ≤ 1] = P[|Y1 | ≤ 1] =
pY~ (y1 , y2 ) dy1 dy2
A
Z
Z
1 1 −y1 ∞ −3y2 /2
e
e
e
dy2 dy1
e
dy2 dy1 +
2 0
−1
−y1
0
Z
Z
1 0 −y1 −3y2 /2 ∞
1 1 −y1 −3y2 /2 ∞
e
e
=
−e
−e
dy1
dy1 +
−y1
0
3 −1
3 0
Z
Z
1 0 y1 /2
1 1 −y1
=
e
dy1 +
e dy1
3 −1
3 0
0
1
1
2
= ey1 /2 −1 − e−y1 0
3
3
1
2
1 − e−1/2 + 1 − e−1
=
3
3
≈ 0.47 (4.3)
1
=
2
Z
0
−y1
Z
∞
−3y2 /2
Figure 4.1 was produced by the following snippet.
par ( mar=c(0,0,0,0) )
plot ( c(0,6), c(0,2), type="n", xlab="", ylab="", xaxt="n",
yaxt="n", bty="n" )
4.2. RANDOM VECTORS
270
X2
Y2
X1
Y1
Figure 4.1: The (X1 , X2 ) plane and the (Y1 , Y2 ) plane. The light gray regions are
~ and Y~ live. The dark gray regions are where |X1 − X2 | ≤ 1.
where X
polygon ( c(1,1.9,1.9,1), c(1,1,1.9,1.9), col=gray(.8),
border=NA )
polygon ( c(1,1.2,1.9,1.9,1.7,1), c(1,1,1.7,1.9,1.9,1.2),
col=gray(.5), border=NA )
segments ( 0, 1, 1.9, 1, lwd=3 ) # x1 axis
segments ( 1, 0, 1, 1.9, lwd=3 ) # x2 axis
text ( c(2,1), c(1,2), c(expression(bold(X[1])),
expression(bold(X[2]))) )
polygon ( c(5,5.9,5.9,4), c(1,1,1.9,1.9), col=gray(.8),
border=NA )
polygon ( c(5,5.2,5.2,4.8,4.8), c(1,1,1.9,1.9,1.2),
col=gray(.5), border=NA )
segments ( 4, 1, 5.9, 1, lwd=3 ) # y1 axis
segments ( 5, 0, 5, 1.9, lwd=3 ) # y2 axis
text ( c(6,5), c(1,2), c(expression(bold(Y[1])),
expression(bold(Y[2]))) )
arrows ( 2.5, 1, 3.5, 1, length=.2, lwd=2 )
4.3. REPRESENTING DISTRIBUTIONS
271
The point of the example, of course, is the method, not the answer. Functions
of random variables and random vectors are common in statistics and probability.
There are many methods to deal with them. The method of transforming the pdf
is one that is often useful.
4.3
Representing Distributions
We usually describe a random variable Y through pY — its pmf if Y is discrete or
its pdf if Y is continuous. But there are at least two alternatives. First, any random
variable Y can be described by its cumulative distribution function, or cdf, FY which
is defined by
(P
c
P[Y = y] if Y is discrete
(4.4)
FY (c) ≡ P[Y ≤ c] = R c y=−∞
p(y) dy
if Y is continuous.
−∞
Equation 4.4 defines the cdf in terms of the pmf or pdf. It is also possible to go
the other way. If Y is continuous, then for any number b ∈ R
Z b
P(Y ≤ b) = F (b) =
p(y) dy
−∞
which shows by the Fundamental Theorem of Calculus that p(y) = F 0 (y). On the
other hand, if Y is discrete, Then P[Y = y] = P[Y ≤ y] − P[Y < y] = FY (y) −
FY (y − ). (We use the notation FY (y − ) to mean the limit of FY (z) as z approaches y
from below. It is also written lim↑0 FY (y − )). Thus the reverse of Equation 4.4 is
(
FY (y) − FY (y − ) if Y is discrete
pY (y) =
(4.5)
FY0 (y)
if Y is continuous
Equation 4.5 is correct except in one case which seldom arises in practice. It is
possible that FY (y) is a continuous but nondifferentiable function, in which case Y
is a continuous random variable, but Y does not have a density. In this case there
is a cdf FY without a corresponding pmf or pdf.
Figure 4.2 shows the pmf and cdf of the Bin(10, .7) distribution and the pdf
and cdf of the Exp(1) distribution.
4.3. REPRESENTING DISTRIBUTIONS
272
Bin (10, .7)
0.0
4
8
0
4
8
y
y
Exp(1)
Exp(1)
0.0
0.4
0.0
0.4
cdf
0.8
0.8
0
pdf
0.4
cdf
0.10
0.00
pmf
0.20
0.8
Bin (10, .7)
0
1
2
3
4
5
0
1
2
y
Figure 4.2: pmf’s, pdf’s, and cdf’s
3
y
4
5
4.3. REPRESENTING DISTRIBUTIONS
273
Figure 4.2 was produced by the following snippet.
par ( mfrow=c(2,2) )
y <- seq ( -1, 11, by=1 )
plot ( y, dbinom ( y, 10, .7 ), type="p", ylab="pmf",
main="Bin (10, .7)" )
plot ( y, pbinom ( y, 10, .7 ), type="p", pch=16,
ylab="cdf", main="Bin (10, .7)" )
segments ( -1:10, pbinom ( -1:10, 10, .7 ),
0:11, pbinom ( -1:10, 10, .7 ) )
y <- seq ( 0, 5, len=50 )
plot ( y, dexp ( y, 1 ), type="l", ylab="pdf", main="Exp(1)" )
plot ( y, pexp ( y, 1 ), type="l", ylab="cdf", main="Exp(1)" )
• segments ( x0, y0, x1, y1) draws line segments. The line segments run
from (x0,y0) to (x1,y1). The arguments may be vectors.
The other alternative representation for Y is its moment generating function or
mgf MY . The moment generating function is defined as
(P
ety pY (y)
MY (t) = E[etY ] = R yty
e pY (y)
if Y is discrete
if Y is continuous
(4.6)
MY is also known as the Laplace transform of pY .
Because we define the mgf as a sum or integral there is the question of whether
the sum or integral is finite and hence whether the mgf is well defined. In Equation 4.6, the mgf is always defined at t = 0. (See Exercise 11.) But even if MY (t) is
not well defined (the integral or sum is not absolutely convergent) for large t, what
matters for statistical practice is whether MY (t) is well defined in a neighborhood
of 0, i.e. whether there exists a δ > 0 such that MY (t) exists for t ∈ (−δ, δ). The
moment generating function gets its name from the following theorem.
Theorem 4.5. If Y has mgf MY defined in a neighborhood of 0, then
n
E[Y ] =
(n)
MY (0)
dn
≡ n MY (t)
dt
0
4.3. REPRESENTING DISTRIBUTIONS
274
Proof. We provide the proof for the case n = 1. The proof for larger values of n is
similar.
Z
d
d
MY (t) =
ety pY (y) dy dt
dt
0
0
Z
d ty e pY (y) dy
=
dt
0
Z
= yety pY (y) dy
0
Z
= ypY (y) dy
= E[Y ]
The second line of the proof has the form
Z
Z
d
d
f (t, y) dy,
f (t, y) dy =
dt
dt
an equality which is not necessarily true. It is true for “nice” functions f ; but establishing exactly what “nice” means requires measure theory and is beyond the scope
of this book. We will continue to use the equality without thorough justification.
One could, if one wished, calculate and plot MY (t), though there is usually little
point in doing so. The main purpose of moment generating functions is in proving
theorems and not, as their name might suggest, in deriving moments. And mgf’s
are useful in proving theorems mostly because of the following two results.
Theorem 4.6. Let X and Y be two random variables with moment generating functions (assumed to exist) MX and MY . If MX (t) = MY (t) for all t in some neighborhood of 0, then FX = FY ; i.e., X and Y have the same distribution.
Theorem 4.7. Let Y1 , . . . be a sequence of random variables with moment generating
functions (assumed to exist) MY1 , . . . . Define M (t) = limn→∞ MYn (t). If the limit
exists for all t in a neighborhood of 0, and if M (t) is a moment generating function,
then there is a unique cdf F such that
1.
F (y) = lim FYn (y)
n→∞
for all y where F is continuous and
4.3. REPRESENTING DISTRIBUTIONS
275
2. M is the mgf of F .
Theorems 4.6 and 4.7 both assume that the necessary mgf’s exist. It is inconvenient that not all distributions have mgf’s. One can avoid the problem by using
characteristic functions (also known as Fourier transforms) instead of moment generating functions. The characteristic function is defined as
CY (t) = E[eitY ]
√
where i = −1. All distributions have characteristic functions, and the characteristic function completely characterizes the distribution, so characteristic functions are ideal for our purpose. However, dealing with complex numbers presents
its own inconveniences. We shall not pursue this topic further. Proofs of Theorems 4.6 and 4.7 and similar results for characteristic functions are omitted but
may be found in more advanced books.
Two more useful results are theorems 4.8 and 4.9.
Theorem 4.8. Let X be a random variable, a, b be constants, and define Y = aX + b.
Then MY (t) = ebt MX (at).
Proof.
MY (t) = E e(aX+b)t
= ebt E eatX
= ebt MX (at)
Theorem 4.9. Let X and Y be independent random variables. Define Z = X + Y .
Then
MZ (t) = MX (t)MY (t)
Proof.
MZ (t) = E e(X+Y )t = E[eXt eY t ] = E[eXt ]E[eY t ] = MX (t)MY (t)
Corollary 4.10. Let Y1 , . . . , Yn be a collection of i.i.d. random variables each with
mgf MY . Define X = Y1 + · · · + Yn . Then
MX (t) = [MY (t)]n
4.4. EXERCISES
4.4
276
Exercises
1. Refer to Equation 4.1 on page 265.
(a) To help visualize the joint density pX~ , make a contour plot. You will
have to choose some values of x1 , some values of x2 , and then evaluate
pX~ (x1 , x2 ) on all pairs (x1 , x2 ) and save the values in a matrix. Finally,
pass the values to the contour function. Choose values of x1 and x2 that
help you visualize pX~ . You may have to choose values by trial and error.
(b) Draw a diagram that illustrates how to find the region A and the limits
of integration in Equation 4.1.
(c) Supply the missing steps in Equation 4.1. Make sure you understand
them. Verify the answer.
(d) Use R to verify the answer to Equation 4.1 by simulation.
2. Refer to Example 1.6 on page 43 on tree seedlings where N is the number of
New seedlings that emerge in a given year and X is the number that survive
to the next year. Find P[X ≥ 1].
3. (X1 , X2 ) have a joint distribution that is uniform on the unit circle. Find
p(X1 ,X2 ) .
4. The random vector (X, Y ) has pdf p(X,Y ) (x, y) ∝ ky for some k > 0 and (x, y)
in the triangular region bounded by the points (0, 0), (−1, 1), and (1, 1).
(a) Find k.
(b) Find P[Y ≤ 1/2].
(c) Find P[X ≤ 0].
(d) Find P[|X − Y | ≤ 1/2].
5. Prove the assertion on page 265 that mutual independence implies pairwise
independence.
~ = (X1 , X2 , X3 ). Prove
(a) Begin with the case of three random variables X
that if X1 , X2 , X3 are mutually independent, then any two of them are
independent.
~ = (X1 , . . . , Xn ).
(b) Generalize to the case X
4.4. EXERCISES
277
6. Refer to Equation 4.2 on page 266. Verify that X1 ⊥ X2 , X1 ⊥ X3 , and
X2 ⊥ X3 but that X1 , X2 , and X3 are not mutually independent.
7. Prove Lemma 4.1
8. Fill in the proof of Theorem 4.2 on page 267.
9. X and Y are uniformly distributed in the rectangle whose corners are (1, 0),
(0, 1), (−1, 0), and (0, −1).
(a)
i.
ii.
iii.
iv.
v.
Find p(x, y).
Are X and Y independent?
Find the marginal densities p(x) and p(y).
Find the conditional densities p(x | y) and p(y | x).
Find E[X], E[X | Y = .5], and E[X | Y = −.5].
(b) Let U = X + Y and V = X − Y .
i.
ii.
iii.
iv.
v.
vi.
Find the region where U and V live.
Find the joint density p(u, v).
Are U and V independent?
Find the marginal densities p(u) and p(v).
Find the conditional densities p(u | v) and p(v | u).
Find E[U ], E[U | V = .5], and E[U | V = −.5].
10. Let the random vector (U, V ) be distributed uniformly on the unit square. Let
X = U V and Y = U/V .
(a) Draw the region of the X–Y plane where the random vector (X, Y ) lives.
(b) Find the joint density of (X, Y ).
(c) Find the marginal density of X.
(d) Find the marginal density of Y .
(e) Find P[Y > 1].
(f) Find P[X > 1].
(g) Find P[Y > 1/2].
(h) Find P[X > 1/2].
(i) Find P[XY > 1].
4.4. EXERCISES
278
(j) Find P[XY > 1/2].
11. Just below Equation 4.6 is the statement “the mgf is always defined at t = 0.”
For any random variable Y , find MY (0).
12. Provide the proof of Theorem 4.5 for the case n = 2.
13. Refer to Theorem 4.9. Where in the proof is the assumption X ⊥ Y used?
C HAPTER 5
S PECIAL D ISTRIBUTIONS
Statisticians often make use of standard parametric families of probability distributions. A parametric family is a collection of probability distributions distinguished
by, or indexed by, a parameter. An example is the Binomial distribution introduced
in Section 1.3.1. There were N trials. Each had a probability θ of success. Usually
θ is unknown and could be any number in (0, 1). There is one Bin(N, θ) distribution
for each value of θ; θ is a parameter; the set of probability distributions
{Bin(N, θ) : θ ∈ (0, 1)}
is a parametric family of distributions.
We have already seen four parametric families — the
Binomial (Section 1.3.1), Poisson (Section 1.3.2), Exponential (Section 1.3.3), and
Normal (Section 1.3.4) distributions. Chapter 5 examines these in more detail and
introduces several others.
5.1
The Binomial and Negative Binomial Distributions
The Binomial Distribution Statisticians often deal with situations in which there
is a collection of trials performed under identical circumstances; each trial results
in either success or failure. Typical examples are coin flips (Heads or Tails), medical
trials (cure or not), voter polls (Democrat or Republican), basketball free throws
(make or miss). Conditions for the Binomial Distribution are
1. the number of trials n is fixed in advance,
279
5.1. BINOMIAL AND NEGATIVE BINOMIAL
280
2. the probability of success θ is the same for each trial, and
3. trials are conditionally independent of each other, given θ.
Let the random variable X be the number of successes in such a collection of trials.
Then X is said to have the Binomial distribution with parameters (n, θ), written
X ∼ Bin(n, θ). The possible values of X are the integers 0, 1, . . . , n. Figure 1.5
shows examples of Binomial pmf’s for several combinations of n and θ. Usually θ
is unknown and the trials are performed in order to learn about θ.
Obviously, large values of X are evidence that θ is large and small values of X
are evidence that θ is small. But to evaluate the evidence quantitatively we must
be able to say more. In particular, once a particular value X = x has been observed
we want to quantify how well it is explained by different possible values of θ. That
is, we want to know p(x | θ).
Theorem 5.1. If X ∼ Bin(n, θ) then
n x
pX (x) =
θ (1 − θ)n−x
x
for x = 0, 1, . . . , n.
Proof. When the n trials of a Binomial experiment are carried out there will be
a sequence of successes (1’s) and failures (0’s) such as 1000110 · · · 100. Let S =
{0, 1}n be the set of such sequences and, for each x ∈ {0, 1, . . . , n}, let Sx be the
subset of S consisting of sequences with x 1’s and n − x 0’s. If s ∈ Sx then Pr(s) =
θx (1 − θ)n−x . In particular, all s’s in Sx have the same probability. Therefore,
pX (x) = P(X = x) = P(Sx )
= (size of Sx ) · θx (1 − θ)n−x
n x
=
θ (1 − θ)n−x
x
The special case n = 1 is important enough to have its own name. When
n = 1 then X is said to have a Bernoulli distribution with parameter θ. We write
X ∼ Bern(θ). If X ∼ Bern(θ) then pX (x) = θx (1 − θ)1−x for x ∈ {0, 1}. Experiments
that have two possible outcomes are called Bernoulli trials.
Suppose X1 ∼ Bin(n1 , θ), X2 ∼ Bin(n2 , θ) and X1 ⊥ X2 . Let X3 = X1 + X2 .
What is the distribution of X3 ? Logic suggests the answer is X3 ∼ Bin(n1 + n2 , θ)
5.1. BINOMIAL AND NEGATIVE BINOMIAL
281
because (1) there are n1 + n2 trials, (2) the trials all have the same probability of
success θ, (3) the trials are independent of each other (the reason for the X1 ⊥ X2
assumption) and (4) X3 is the total number of successes. Theorem 5.3 shows a
formal proof of this proposition. But first we need to know the moment generating
function.
Theorem 5.2. Let X ∼ Bin(n, θ). Then
n
MX (t) = θet + (1 − θ)
Proof. Let Y ∼ Bern(θ). Then
MY (t) = E[etY ] = θet + (1 − θ).
Now let X =
Pn
i=1
Yi where the Yi ’s are i.i.d. Bern(θ) and apply Corollary 4.10.
Theorem 5.3. Suppose X1 ∼ Bin(n1 , θ); X2 ∼ Bin(n1 , θ); and X1 ⊥ X2 . Let X3 =
X1 + X2 . Then X3 ∼ Bin(n1 + n2 , θ).
Proof.
MX3 (t) = MX1 (t)MX2 (t)
n n
= θet + (1 − θ) 1 θet + (1 − θ) 2
n +n
= θet + (1 − θ) 1 2
The first equality is by Theorem 4.9; the second is by Theorem 5.2. We recognize
the last expression as the mgf of the Bin(n1 + n2 , θ) distribution. So the result
follows by Theorem 4.6.
The mean of the Binomial distribution was calculated in Equation 1.11. Theorem 5.4 restates that result and gives the variance and standard deviation.
Theorem 5.4. Let X ∼ Bin(n, θ). Then
1. E[X] = nθ.
2. Var(X) = nθ(1 − θ).
p
3. SD(X) = nθ(1 − θ).
5.1. BINOMIAL AND NEGATIVE BINOMIAL
282
P
Proof. The proof for E[X] was given earlier. If X ∼ Bin(n, θ), then X = ni=1 Xi
where Xi ∼ Bern(θ) and the Xi ’s are mutually independent. Therefore, by Theorem 1.9, Var(X) = n Var(Xi ). But
Var(Xi ) = E(Xi2 ) − E(Xi )2 = θ − θ2 = θ(1 − θ).
So Var(X) = nθ(1 − θ). The result for SD(X) follows immediately.
Exercise 1 asks you to prove Theorem 5.4 by moment generating functions.
R comes with built-in functions for working with Binomial distributions. You can
get the following information by typing help(dbinom), help(pbinom), help(qbinom),
or help(rbinom). There are similar functions for working with other distributions,
but we won’t repeat their help pages here.
Usage:
dbinom(x,
pbinom(q,
qbinom(p,
rbinom(n,
size,
size,
size,
size,
prob, log = FALSE)
prob, lower.tail = TRUE, log.p = FALSE)
prob, lower.tail = TRUE, log.p = FALSE)
prob)
Arguments:
x, q: vector of quantiles.
p: vector of probabilities.
n: number of observations. If ‘length(n) > 1’, the length is
taken to be the number required.
size: number of trials.
prob: probability of success on each trial.
log, log.p: logical; if TRUE, probabilities p are given as log(p).
lower.tail: logical; if TRUE (default), probabilities are P[X <= x],
otherwise, P[X > x].
Details:
5.1. BINOMIAL AND NEGATIVE BINOMIAL
283
The binomial distribution with ‘size’ = n and ‘prob’ = p has
density
p(x) = choose(n,x) p^x (1-p)^(n-x)
for x = 0, ..., n.
If an element of ‘x’ is not integer, the result of ‘dbinom’ is
zero, with a warning. p(x) is computed using Loader’s algorithm,
see the reference below.
The quantile is defined as the smallest value x such that
F(x) >= p, where F is the distribution function.
Value:
‘dbinom’ gives the density, ‘pbinom’ gives the distribution
function, ‘qbinom’ gives the quantile function and ‘rbinom’
generates random deviates.
If ‘size’ is not an integer, ‘NaN’ is returned.
References:
Catherine Loader (2000). Fast and Accurate Computation of
Binomial Probabilities; manuscript available from <URL:
http://cm.bell-labs.com/cm/ms/departments/sia/catherine/dbinom>
See Also:
‘dnbinom’ for the negative binomial, and ‘dpois’ for the Poisson
distribution.
Examples:
# Compute P(45 < X < 55) for X Binomial(100,0.5)
sum(dbinom(46:54, 100, 0.5))
5.1. BINOMIAL AND NEGATIVE BINOMIAL
284
## Using "log = TRUE" for an extended range :
n <- 2000
k <- seq(0, n, by = 20)
plot (k, dbinom(k, n, pi/10, log=TRUE), type=’l’, ylab="log density",
main = "dbinom(*, log=TRUE) is better than log(dbinom(*))")
lines(k, log(dbinom(k, n, pi/10)), col=’red’, lwd=2)
## extreme points are omitted since dbinom gives 0.
mtext("dbinom(k, log=TRUE)", adj=0)
mtext("extended range", adj=0, line = -1, font=4)
mtext("log(dbinom(k))", col="red", adj=1)
Figure 5.1 shows the Binomial pmf for several values of x, n, and p. Note that
for a fixed p, as n gets larger the pmf looks increasingly like a Normal pdf. That’s
the Central Limit Theorem. Let Y1 , . . .P
, Yn ∼ i.i.d. Bern(p). Then the distribution
of X P
is the same as the distribution of Yi and the Central Limit Theorem tells us
that
Yi looks increasingly Normal as n → ∞.
Also, for a fixed n, the pmf looks more Normal when p = .5 than when p = .05.
And that’s because convergence under the Central Limit Theorem is faster when
the distribution of each Yi is more symmetric.
Figure 5.1 was produced by
par ( mfrow=c(3,2) )
n <- 5
p <- .05
x <- 0:5
plot ( x, dbinom(x,n,p), ylab="p(x)", main="n=5, p=.05" )
...
The Negative Binomial Distribution Rather than fix in advance the number of
trials, experimenters will sometimes continue the sequence of trials until a prespecified number of successes r has been achieved. In this case the total number of
failures N is the random variable and is said to have the Negative Binomial distribution with parameters (r, θ), written N ∼ NegBin(r, θ). (Warning: some authors
say that the total number of trials, N + r, has the Negative Binomial distribution.)
One example is a gambler who decides to play the daily lottery until she wins.
5.1. BINOMIAL AND NEGATIVE BINOMIAL
285
n=5, p=.5
0.05
0.0
1
2
3
4
5
0
1
2
3
4
x
n=20, p=.05
n=20, p=.5
p(x)
0.2
0.0
0.1
5
0.05 0.10 0.15
x
0.3
0
p(x)
0.15
p(x)
0.4
0.2
p(x)
0.6
0.25
0.8
n=5, p=.05
1
2
3
4
5
6
8
10
12
x
n=80, p=.05
n=80, p=.5
p(x)
0.02
0.05
p(x)
14
0.06
x
0.15
0
0
2
4
6
8
30
35
x
Figure 5.1: The Binomial pmf
40
x
45
50
5.1. BINOMIAL AND NEGATIVE BINOMIAL
286
The prespecified number of successes is r = 1. The number of failures N until she
wins is random. In this case, and whenever r = 1, N is said to have a Geometric
distribution with parameter θ; we write N ∼ Geo(θ). Often, θ is unknown. Large
values of N are evidence that θ is small; small values of N are evidence that θ is
large. The probability function is
pN (k) = P(N = k)
= P(r − 1 successes in the first k + r − 1 trials
and k + r’th trial is a success)
k+r−1 r
=
θ (1 − θ)k
r−1
for k = 0, 1, . . . .
Let N1 ∼ NegBin(r1 , θ), . . . , Nt ∼ NegBin(rt , θ), and N1 , . . . , Nt be independent
P
of eachP
other. Then one can imagine a sequence of trials of length (Ni + ri )
having
ri successes. N1 is the number of failures before the r1 ’th success; . . . ;
N1 + · · · + P
Nt is the number of failures before the r1 + · · · +Prt ’th success. It is evident
that N ≡
Ni is the number of failures before the r ≡
ri ’th success occurs and
therefore that N ∼ NegBin(r, θ).
Theorem 5.5. If Y ∼ NegBin(r, θ) then E[Y ] = r(1 − θ)/θ and Var(Y ) = r(1 − θ)/θ2 .
Proof. It suffices to prove the result for r = 1. Then the result for r > 1 will follow
5.1. BINOMIAL AND NEGATIVE BINOMIAL
287
by the foregoing argument and Theorems 1.7 and 1.9. For r = 1,
E[N ] =
=
∞
X
n=0
∞
X
n P[N = n]
n(1 − θ)n θ
n=1
= θ(1 − θ)
∞
X
n(1 − θ)n−1
n=1
∞
X
= −θ(1 − θ)
n=1
d
(1 − θ)n
dθ
∞
= −θ(1 − θ)
d X
(1 − θ)n
dθ n=1
d 1−θ
dθ θ
−1
= −θ(1 − θ) 2
θ
1−θ
=
θ
= −θ(1 − θ)
The trick of writing each term as a derivative, then switching the order of summa-
5.1. BINOMIAL AND NEGATIVE BINOMIAL
288
tion and derivative is occasionally useful. Here it is again.
2
E(N ) =
∞
X
n2 P[N = n]
n=0
= θ(1 − θ)
∞
X
(n(n − 1) + n) (1 − θ)n−1
n=1
= θ(1 − θ)
∞
X
n−1
n(1 − θ)
+ θ(1 − θ)
2
∞
X
n(n − 1)(1 − θ)n−2
n=1
n=1
∞
X
d2
=
1−θ
+ θ(1 − θ)2
(1 − θ)n
2
θ
θ
n=1
=
∞
d2 X
1−θ
+ θ(1 − θ)2 2
(1 − θ)n
θ
θ n=1
2
1−θ
2d 1 − θ
+ θ(1 − θ) 2
=
θ
θ θ
1−θ
θ(1 − θ)2
=
+2
θ
θ3
2
2 − 3θ + θ
=
θ2
Therefore,
Var(N ) = E[N 2 ] − (E[N ])2 =
1−θ
.
θ2
The R functions for working with the negative Binomial distribution are dnbinom,
pnbinom, qnbinom, and rnbinom. Figure 5.2 displays the Negative Binomial pdf and
illustrates the use of qnbinom.
Figure 5.2 was produced with the following snippet.
r <- c ( 1, 5, 30 )
p <- c ( .1, .5, .8 )
par ( mfrow=c(3,3) )
for ( i in seq(along=r) )
for ( j in seq(along=p) ) {
lo <- qnbinom(.01,r[i],p[j])
5.1. BINOMIAL AND NEGATIVE BINOMIAL
r = 1, ! = 0.5
r = 1, ! = 0.8
20
40
0.6
0.4
0.2
probability
0
2
4
6
0.0
1.0
2.0
r = 5, ! = 0.1
r = 5, ! = 0.5
r = 5, ! = 0.8
60 100
0.15
0.05
probability
probability
0.010
20
0.25
N
0.02 0.06 0.10 0.14
N
0.020
N
0.000
0
4
8
14
0
2
4
N
N
r = 30, ! = 0.1
r = 30, ! = 0.5
r = 30, ! = 0.8
200
350
N
15
30
0.02 0.06 0.10
probability
0.01
0.002
probability
0.006
0.05
N
0.03
probability
0.4
0.0
0
probability
0.2
probability
0.08
0.04
0.00
probability
0.8
r = 1, ! = 0.1
289
45
N
Figure 5.2: The Negative Binomial pmf
2
6
12
N
5.2. MULTINOMIAL
290
hi <- qnbinom(.99,r[i],p[j])
x <- lo:hi
plot ( x, dnbinom(x,r[i],p[j]), ylab="probability", xlab="N",
main = substitute ( list ( r == a, theta == b),
list(a=i,b=j) ) )
}
• lo and hi are the limits on the x-axis of each plot. The use of qbinom ensures
that each plot shows at least 98% of its distribution.
5.2
The Multinomial Distribution
The multinomial distribution generalizes the binomial distribution in the following
way. The binomial distribution applies when the outcome of a trial has two possible
values; the multinomial distribution applies when the outcome of a trial has more
than two possible outcomes. Some examples are
Clinical Trials In clinical trials, each patient is administered a treatment, usually
an experimental treatment or a standard, control treatment. Later, each patient may be scored as either success, failure, or censored. Censoring occurs
because patients don’t show up for their appointments, move away, or can’t
be found for some other reason.
Craps After the come-out roll, each successive roll is either a win, loss, or neither.
Genetics Each gene comes in several variants. Every person has two copies of the
gene, one maternal and one paternal. So the person’s status can be described
by a pair like {a, c} meaning that she has one copy of type a and one copy
of type c. The pair is called the person’s genotype. Each person in a sample
can be considered a trial. Geneticists may count how many people have each
genotype.
Political Science In an election, each person prefers either the Republican candidate, the Democrat, the Green, or is undecided.
In this case we count the number of outcomes of each type. If there are k possible
outcomes then the result is a vector y1 , . . . , yk where yi is the number of times that
outcome i occured and y1 + · · · + yk = n is the number of trials.
5.2. MULTINOMIAL
291
Let p ≡ (p1 , . . . , pk ) be the probabilities of the k categories and n be the number
of trials. We write Y ∼ Mult(n, p). In particular, Y ≡ (Y1 , . . . , Yk ) is a vector of
length k. Because Y is a vector, so is its expectation
E[Y ] = µ = (µ1 , . . . , µk ) ≡ (E[Y1 ], . . . , E[Yk ]) = (np1 , . . . , npk ).
The i’th coordinate, Yi , is a random variable in its own right. Because Yi counts
the number of times outcome i occurred in n trials, its distribution is
Yi ∼ Bin(n, pi ).
(See Exercise 19.)
(5.1)
Although the Yi ’s are all Binomial, they are not independent. After all, if Y1 = n,
then Y2 = · · · = Yk = 0, so the Yi ’s must be dependent. What is their joint pmf?
What is the conditional distribution of, say, Y2 , . . . , Yk given Y1 ? The next two
theorems provide the answers.
Theorem 5.6. If Y ∼ Mult(n, p) then
fY (y1 , . . . , yk ) =
where
n
y1 ···yk
n
py11 · · · pykk
y1 · · · yk
is the multinomial coefficient
n
y1 · · · yk
n!
=Q
yi !
Proof. When the n trials of a multinomial experiment are carried out, there will
be a sequence of outcomes such as abkdbg · · · f , where the letters indicate the outcomes of individual trials. One such sequence is
· · }b · · · k
· · k}
· · a} b| ·{z
| ·{z
|a ·{z
y1 times y2 times
The probability of this particular sequence is
yk k’s has the same probability. So
yk times
Q
pyi i . Every sequence with y1 a’s, . . . ,
fY (y1 , . . . , yk ) = (number of such sequences) ×
Y
pyi i
=
Y
n
pyi i .
y1 · · · yk
5.3. POISSON
292
Theorem 5.7. If Y ∼ Mult(n, p) then
(Y2 , . . . , Yk | Y1 = y1 ) ∼ Mult(n − y1 , (p∗2 , . . . , p∗k ))
where p∗i = pi /(1 − p1 ) for i = 2, . . . , k.
Proof. See Exercise 18.
R’s functions for the multinomial distribution are rmultinom and dmultinom.
rmultinom(m,n,p) draws a sample of size m. p is a vector of probabilities. The
result is a k × m matrix. Each column is one draw, so each column sums to n. The
user does not specify k; it is determined by k = length(p).
5.3
The Poisson Distribution
The Poisson distribution is used to model counts in the following situation.
• There is a domain of study, usually a block of space or time.
• Events arise at seemingly random locations in the domain.
• There is an underlying rate at which events arise.
• The rate does not vary over the domain.
• The occurence of an event at any location `1 is independent of the occurence
of an event at any other location `2 .
Let y be the total number of events that arise in the domain. Y has a Poisson
distribution with rate parameter λ, written Y ∼ Poi(λ). The pmf is
pY (y) =
e−λ λy
y!
for y = 0, 1, . . .
The mean was derived in Chapter 1, Exercise 18a. It is
E[Y ] = λ.
Theorem 5.8. Let Y ∼ Poi(λ). Then
t
MY (t) = eλ(e −1)
5.3. POISSON
293
Proof.
MY (t) = E[etY ] =
∞
X
ety pY (y) =
y=0
=
∞
X
e−λ (λet )y
y!
y=0
∞
X
y=0
−λ
=
e
e−λet
ety
e−λ λy
y!
t
∞
X
e−λe (λet )y
y=0
y!
t
= eλ(e −1)
Theorem 5.9. Let Y ∼ Poi(λ). Then
Var(Y ) = λ
Proof. Just for fun (!) we will prove the theorem two ways — first directly and
then with moment generating functions.
Proof 1.
2
E[Y ] =
∞
X
y
2e
y=0
∞
X
−λ y
λ
y!
∞
e−λ λy X e−λ λy
=
y(y − 1)
+
y
y!
y!
y=0
y=0
∞
X
e−λ λy
=
y(y − 1)
+λ
y!
y=2
=
∞
X
e−λ λz+2
z=0
2
=λ +λ
So Var(Y ) = E[Y 2 ] − (E[Y ])2 = λ.
z!
+λ
5.3. POISSON
294
Proof 2.
d2
E[Y ] = 2 MY (t)
dt
t=0
d2 λ(et −1) = 2e
dt
t=0
d t λ(et −1) = λe e
t=0
hdt
i
t λ(et −1)
2 2t λ(et −1)
= λe e
+λ e e
2
t=0
= λ + λ2
So Var(Y ) = E[Y 2 ] − (E[Y ])2 = λ.
Theorem 5.10.
i ) for i = 1, . . . , n and let the Yi s be mutually indepenPLet Yi ∼ Poi(λP
dent. Let Y = n1 Yi and λ = n1 λi . Then Y ∼ Poi(λ).
Proof. Using Theorems 4.9 and 5.8 we have
MY (t) =
Y
MYi (t) =
Y
t
t
eλi (e −1) = eλ(e −1)
which is the mgf of the Poi(λ) distribution.
Suppose, for i = 1, . . . , n, Yi is the number of events occurring on a domain
Di ; YP
i ∼ Poi(λi ). Suppose the Di ’s are disjoint and the Yi ’s are independent. Let
Y =
Yi be the number of events arising
P on D = ∪Di . The logic of the situation
suggests that Y ∼ Poi(λ) where λ =
λi . Theorem 5.10 assures us that everything works correctly; that Y does indeed have the Poi(λ) distribution. Another
way to put it: If Y ∼ Poi(λ), and if the individual events that Y counts are randomly divided into two types Y1 and Y2 according to a binomial distributuion with
parameter θ, then (1) Y1 ∼ Poi(λθ) and Y2 ∼ Poi(λ(1 − θ)) and (2) Y1 ⊥ Y2 .
Figure 5.3 shows the Poisson pmf for λ = 1, 4, 16, 64. As λ increases the pmf
looks increasingly Normal. That’s a consequence of Theorem 5.10 and the Central
LimitP
Theorem. When Y ∼ Poi(λ) Theorem 5.10 tells us we can think of Y as
Y = λi=1 Yi where each Yi ∼ Poi(1). (λ must be an integer for this to be precise.)
Then the Central Limit Theorem tells us that Y will be approximately Normal when
λ is large.
5.3. POISSON
295
!=4
0.15
0.05
0.00
0.0
2
4
6
0
2
4
6
y
y
! = 16
! = 64
8
0.02
0.00
0.00
0.04
pY(y)
0.04
0.08
0
pY(y)
0.10
pY(y)
0.2
0.1
pY(y)
0.3
0.20
!=1
10 15 20 25
y
50 60 70 80
y
Figure 5.3: Poisson pmf for λ = 1, 4, 16, 64
5.3. POISSON
296
Figure 5.3 was produced with the following snippet.
y <- 0:7
plot ( y, dpois(y,1), xlab="y", ylab=expression(p[Y](y)),
main=expression(lambda==1) )
y <- 0:10
plot ( y, dpois(y,4), xlab="y", ylab=expression(p[Y](y)),
main=expression(lambda==4) )
y <- 6:26
plot ( y, dpois(y,16), xlab="y", ylab=expression(p[Y](y)),
main=expression(lambda==16) )
y <- 44:84
plot ( y, dpois(y,64), xlab="y", ylab=expression(p[Y](y)),
main=expression(lambda==64) )
One of the early uses of the Poisson distribution was in The probability variations
in the distribution of α particles by Rutherford and Geiger 1910. (An α particle is a
Helium nucleus, or two protons and two neutrons.)
Example 5.1 (Rutherford and Geiger)
The phenomenon of radioactivity was beginning to be understood in the early 20th century.
In their 1910 article, Rutherford and Geiger write
“In counting the α particles emitted from radioactive substances . . . [it] is of
importance to settle whether . . . variations in distribution are in agreement
with the laws of probability, i.e. whether the distribution of α particles on an
average is that to be anticipated if the α particles are expelled at random both
in regard to space and time. It might be conceived, for example, that the
emission of an α particle might precipitate the disintegration of neighbouring
atoms, and so lead to a distribution of α particles at variance with the simple
probability law.”
So Rutherford and Geiger are going to do three things in their article. They’re going to
count α particle emissions from some radioactive substance; they’re going to derive the
distribution of α particle emissions according to theory; and they’re going to compare
the actual and theoretical distributions.
Here they describe their experimental setup.
5.3. POISSON
297
“The source of radiation was a small disk coated with polonium, which was
placed inside an exhausted tube, closed at one end by a zinc sulphide screen.
The scintillations were counted in the usual way . . . the number of scintillations . . . corresponding to 1/8 minute intervals were counted . . . .
“The following example is an illustration of the result obtained. The numbers,
given in the horizontal lines, correspond to the number of scintillations for
successive intervals of 7.5 seconds.
1st minute :
2nd ”
3rd ”
4th ”
5th ”
3
5
5
8
7
7 4 4
2 5 4
4 1 3
2 2 2
4 2 6
2
3
3
3
4
3 2
5 4
1 5
4 2
5 10
0. . . . .
2 ....
2 ....
6 ....
4 ....
Average for 5 minutes . . .
True average . . . . . . . . . . .
Total per minute.
25
30
24
31
42
30.4
31.0
And here they describe their theoretical result.
“The distribution of α particles according to the law of probability was kindly
worked out for us by Mr. Bateman. The mathematical theory is appended as
a note to this paper. Mr. Bateman has shown that if x be the true average
number of particles for any given interval falling on the screen from a constant
source, the probability that n α particles are observed in the same interval is
n
given by xn! e−x . n is here a whole number, which may have all positive values
from 0 to ∞. The value of x is determined by counting a large number of
scintillations and dividing by the number of intervals involved. The probability
for n α particles in the given interval can then at once be calculated from
the theory.”
Refer to Bateman [1910] for his derivation. Table 5.1 shows their data. As Rutherford
and Geiger explain:
“For convenience the tape was measured up in four parts, the results of which
are given separately in horizontal columns I. to IV.
“For example (see column I.), out of 792 intervals of 1/8 minute, in which
3179 α particles were counted, the number of intervals 3 α particles was 152.
Combining the four columns, it is seen that out of 2608 intervals containing
5.3. POISSON
298
10,097 particles, the number of times that 3 α particles were observed was
525. The number calculated from the equation was the same, viz. 525.”
Finally, how did Rutherford and Geiger compare their actual and theoretical distributions?
They did it with a plot, which we reproduce as Figure 5.4. Their conclusion:
“It will be seen that, on the whole, theory and experiment are in excellent
accord. . . . We may consequently conclude that the distribution of α particles
in time is in agreement with the laws of probability and that the α particles
are emitted at random. . . . Apart from their bearing on radioactive problems,
these results are of interest as an example of a method of testing the laws of
probability by observing the variations in quantities involved in a spontaneous
material process.”
Example 5.2 (neurobiology)
This example continues Example 2.6. We would like to know whether this neuron responds differently to different tastants and, if so, how. To that end, we’ll see how often
the neuron fires in a short period of time after receiving a tastant and we’ll compare
the results for different tastants. Specifically, we’ll count the number of spikes in the
150 milliseconds (150 msec = .15 s) immediately following the delivery of each tastant.
(150 msec is about the rate at which rats can lick and is thought by neurobiologists to
be about the right interval of time.) Let Yij be the number of spikes in the 150 msec
following the j’th delivery of tastant i. Because we’re counting the number of events in
a fixed period of time we’ll adopt a Poisson model:
Yij ∼ Poi(λi )
where λi is the average firing rate of this neuron to tastant i.
We begin by making a list to hold the data. There should be one element for each
tastant. That element should be a vector whose length is the number of times that
tastant was delivered. Here is the R code to do it. (Refer to Example 2.6 for reading in
the data.)
nspikes <- list(
MSG100 = rep (
MSG300 = rep (
NaCl100 = rep (
NaCl300 = rep (
water
= rep (
)
NA,
NA,
NA,
NA,
NA,
length(tastants$MSG100) ),
length(tastants$MSG300) ),
length(tastants$NaCl100) ),
length(tastants$NaCl300) ),
length(tastants$water) )
Number
0
1
2
of
α
particles
I . . . . . . . . 15 56 106
II . . . . . . . 17 39 88
III . . . . . . 15 56 97
IV . . . . . . 10 52 92
Sum . . . . 57 203 383
Theoretical54 210 407
values
152
116
139
118
525
525
3
5
6
7
170 122 88 50
120 98 63 37
118 96 60 26
124 92 62 26
532 408 273 139
508 394 254 140
4
17
4
18
6
45
68
8
9 10 11 12 13 14 Number
of
α
particles
12 3 0 0 1 0 3179
9 4 1 0 0 0 2334
3 3 1 0 0 0 2373
3 0 2 0 0 1 2211
27 10 4 0 1 1 10097
29 11 4 1 4 1
Number
of intervals
792
596
632
588
2608
4.01
3.92
3.75
3.76
3.87
Average
number
5.3. POISSON
299
Table 5.1: Rutherford and Geiger’s data
300
400
300
200
0
100
Number of Groups
500
5.3. POISSON
0
2
4
6
8
10
12
Number of Particles in Interval
Figure 5.4: Rutherford and Geiger’s Figure 1 comparing theoretical (solid line) to
actual (open circles) distribution of α particle counts.
5.3. POISSON
301
Now we fill in each element by counting the number of neuron firings in the time
interval.
for ( i in seq(along=nspikes) )
for ( j in seq(along=nspikes[[i]]) )
nspikes[[i]][j] <- sum (
spikes[[8]] > tastants[[i]][j]
& spikes[[8]] <= tastants[[i]][j] + .15
)
Now we can see how many times the neuron fired after each delivery of, say, MSG100 by
typing nspikes$MSG100.
Figure 5.5 compares the five tastants graphically. Panel A is a stripchart. It has five
tick marks on the x-axis for the five tastants. Above each tick mark is a collection of
circles. Each circle represents one delivery of the tastant and shows how many times
the neuron fired in the 150 msec following that delivery. Panel B shows much the same
information in a mosaic plot. The heights of the boxes show how often that tastant
produced 0, 1, . . . , 5 spikes. The width of each column shows how often that tastant
was delivered. Panel C shows much the same information in yet a different way. It has
one line for each tastant; that line shows how often the neuron responded with 0, 1,
. . . , 5 spikes. Panel D compares likelihood functions. The five curves are the likelihood
functions for λ1 , . . . , λ5 .
There does not seem to be much difference in the response of this neuron to different
tastants. Although we can compute the m.l.e. λ̂i ’s with
lapply ( nspikes, mean )
and find that they range from a low of λ̂3 ≈ 0.08 for .1 M NaCl to a high of λ̂1 ≈ 0.4
for .1M MSG, panel D suggests the plausibility of λ1 = · · · = λ5 ≈ .2.
Figure 5.5 was produced with the following snippet.
spiketable <- matrix ( NA, length(nspikes), 6,
dimnames = list ( tastant = 1:5,
counts = 0:5 )
)
for ( i in seq(along=nspikes) )
spiketable[i,] <- hist ( nspikes[[i]], seq(-.5,5.5,by=1),
plot=F )$counts
5.3. POISSON
302
A Neuron’s Responses
to 5 Tastants
A
B
2
3
5
4
1
0
counts
4
3
2
543 2
1
0
number of firings
5
1
1
2
3
4
5
tastant
tastant
D
0.8
0.0
0.4
likelihood
0.4
0.0
fraction
0.8
C
0
1
2
3
4
number of firings
5
0.0
0.2
0.4
0.6
0.8
1.0
lambda
Figure 5.5: Numbers of firings of a neuron in 150 msec after five different tastants. Tastants: 1=MSG .1M; 2=MSG .3M; 3=NaCl .1M; 4=NaCl .3M; 5=water.
Panels: A: A stripchart. Each circle represents one delivery of a tastant. B: A mosaic plot. C: Each line represents one tastant. D: Likelihood functions. Each line
represents one tastant.
5.4. UNIFORM
freqtable <-
303
apply ( spiketable, 1, function(x)x/sum(x) )
• The line spiketable <- ... creates a matrix to hold the data and illustrates
the use of dimnames to name the dimensions. Some plotting commands use those
names for labelling axes.
• The line spiketable[i,] <- ... shows an interesting use of the hist command. Instead of plotting a histogram it can simply return the counts.
• The line freqtable <- ... divides each row of the matrix by its sum, turning
counts into proportions.
But let’s investigate a little further. Do the data really follow a Poisson distribution?
Figure 5.6 shows the Poi(.2) distribution while the circles show the actual fractions of
firings. There is apparently good agreement. But numbers close to zero can be deceiving.
The R command dpois ( 0:5, .2 ) reveals that the probability of getting 5 spikes is
less than 0.00001, assuming λ ≈ 0.2. So either the λi ’s are not all approximately .2,
neuron spiking does not really follow a Poisson distribution, or we have witnessed a very
unusual event.
Figure 5.6 was produced with the following snippet.
matplot ( 0:5, freqtable, pch=1, col=1,
xlab="number of firings", ylab="fraction" )
lines ( 0:5, dpois ( 0:5, 0.2 ) )
5.4
The Uniform Distribution
The Discrete Uniform Distribution The discrete uniform distribution is the distribution that gives equal weight to each integer 1, . . . , n. We write Y ∼ U(1, n).
The pmf is
p(y) = 1/n
(5.2)
for y = 1, . . . , n. The discrete uniform distribution is used to model, for example,
dice rolls, or any other experiment in which the outcomes are deemed equally
304
0.4
0.0
0.2
fraction
0.6
0.8
5.4. UNIFORM
0
1
2
3
4
5
number of firings
Figure 5.6: The line shows Poisson probabilities for λ = 0.2; the circles show the
fraction of times the neuron responded with 0, 1, . . . , 5 spikes for each of the five
tastants.
5.5. GAMMA, EXPONENTIAL, CHI SQUARE
305
likely. The only parameter is n. It is not an especially useful distribution in practical
work but can be used to illustrate concepts in a simple setting. For an applied
example see Exercise 22.
The Continuous Uniform Distribution The continuous uniform distribution is
the distribution whose pdf is flat over the interval [a, b]. We write Y ∼ U(a, b).
Although the notation might be confused with the discrete uniform, the context
will indicate which is meant. The pdf is
p(y) = 1/(b − a)
for y ∈ [a, b]. The mean, variance, and moment generating function are left as
Exercise 23.
Suppose we observe a random sample y1 , . . . , yn from U(a, b). What is the
m.l.e.(â, b̂)? The joint density is
(
1 n
if a ≤ y(1) and b ≥ y(n)
b−a
p(y1 , . . . , yn ) =
0
otherwise
which is maximized, as a function of (a, b), if b − a is as small as possible without
making the joint density 0. Thus, â = y(1) and b̂ = y(n) .
5.5
The Gamma, Exponential, and Chi Square Distributions
“Γ” is the upper case Greek letter Gamma. The gamma function is a special mathematical function defined on R+ as
Z ∞
Γ(α) =
tα−1 e−t dt
0
Information about the gamma function can be found in mathematics texts and
reference books. For our purposes, the key facts are:
Γ(α + 1) = αΓ(α) for α > 0
Γ(n) = (n − 1)! for positive integers n
√
Γ(1/2) = π
5.5. GAMMA, EXPONENTIAL, CHI SQUARE
306
For any positive numbers α and β, the Gamma(α, β) distribution has pdf
p(y) =
1
y α−1 e−y/β
Γ(α)β α
for y ≥ 0
(5.3)
We write Y ∼ Gam(α, β).
Figure 5.7 shows Gamma densities for four values of α and four values of β.
• In each panel of Figure 5.7 the curves for different α’s have different shapes.
Sometimes α is called the shape parameter of the Gamma distribution.
• The four panels look identical except for the axes. I.e., the four curves with
α = .5, one from each panel, have the same shape but different scales. The
different scales correspond to different values of β. For this reason β is called
a scale parameter. One can see directly from Equation 5.3 that β is a scale
parameter because p(y) depends on y only through the ratio y/β. The idea of
scale parameter is embodied in Theorem 5.11. See Section 7.6 for more on
scale parameters.
Figure 5.7 was produced by the following snippet.
par ( mfrow=c(2,2) )
shape <- c ( .5, 1, 2, 4 )
scale <- c ( .5, 1, 2, 4 )
leg
<- expression ( alpha == .5, alpha == 1,
alpha == 2, alpha == 4 )
for ( i in seq(along=scale) ) {
ymax <- scale[i]*max(shape) + 3*sqrt(max(shape))*scale[i]
y <- seq ( 0, ymax, length=100 )
den <- NULL
for ( sh in shape )
den <- cbind ( den, dgamma(y,shape=sh,scale=scale[i]) )
matplot ( y, den, type="l", main=letters[i], ylab="p(y)" )
legend ( ymax*.1, max(den[den!=Inf]), legend = leg )
}
5.5. GAMMA, EXPONENTIAL, CHI SQUARE
307
!=1
1.5
3.0
! = 0.5
1.0
0.5
0.0
2
3
4
5
0
2
4
6
y
y
!=2
!=4
8
0.4
1
0.8
0
0.2
0.3
" = 0.5
"=1
"=2
"=4
0.0
0.0
0.1
0.4
p(y)
0.6
" = 0.5
"=1
"=2
"=4
0.2
p(y)
" = 0.5
"=1
"=2
"=4
p(y)
0.0
1.0
p(y)
2.0
" = 0.5
"=1
"=2
"=4
0
5
10 15 20
y
0
10 20 30 40
y
Figure 5.7: Gamma densities for various values of α and β.
5.5. GAMMA, EXPONENTIAL, CHI SQUARE
308
Theorem 5.11. Let X ∼ Gam(α, β) and let Y = cX. Then Y ∼ Gam(α, cβ).
Proof. Use Theorem 1.1.
pX (x) =
1
xα−1 e−x/β ,
α
Γ(α)β
Since Y = cX, x = y/c and dx/dy = 1/c, so
1
(y/c)α−1 e−y/cβ
cΓ(α)β α
1
=
(y)α−1 e−y/cβ
Γ(α)(cβ)α
pY (y) =
which is the Gam(α, cβ) density. Also see Exercise 9.
The mean, mgf, and variance are recorded in the next several theorems.
Theorem 5.12. Let Y ∼ Gam(α, β) Then E[Y ] = αβ.
Proof.
Z
∞
1
y α−1 e−y/β dy
α
Γ(α)β
0
Z
Γ(α + 1)β ∞
1
y α e−y/β dy
=
α+1
Γ(α)
Γ(α
+
1)β
0
= αβ.
y
E[Y ] =
The last equality follows because (1) Γ(α + 1) = αΓ(α), and (2) the integrand is a
Gamma density so the integral is 1. Also see Exercise 9.
The last trick in the proof — recognizing an integrand as a density and concluding that the integral is 1 — is very useful. Here it is again.
Theorem 5.13. Let Y ∼ Gam(α, β). Then the moment generating function is MY (t) =
(1 − tβ)−α for t < 1/β.
Proof.
Z
∞
1
y α−1 e−y/β dy
α
Γ(α)β
0
β
α Z ∞
( 1−tβ )
1−tβ
1
α−1 −y β
=
y
e
dy
β
βα
Γ(α)( 1−tβ
)α
0
MY (t) =
ety
= (1 − tβ)−α
5.5. GAMMA, EXPONENTIAL, CHI SQUARE
309
Theorem 5.14. Let Y ∼ Gam(α, β). Then
Var(Y ) = αβ 2
and
SD(Y ) =
√
αβ.
Proof. See Exercise 10.
The Exponential Distribution We often have to deal with situations such as
• the lifetime of an item
• the time until a specified event happens
The most fundamental probability distribution for such situations is the exponential distribution. Let Y be the time until the item dies or the event occurs. If Y
has an exponential distribution then for some λ > 0 the pdf of Y is
pY (y) = λ−1 e−y/λ
for y ≥ 0.
and we write Y ∼ Exp(λ). This density is pictured in Figure 5.8 (a repeat of
Figure 1.7) for four values of λ. The exponential distribution is the special case
of the Gamma distribution when α = 1. The mean, SD, and mgf are given by
Theorems 5.12 – 5.14.
Each exponential density has its maximum at y = 0 and decreases monotonically. The value of λ determines the value pY (0 | λ) and the rate of decrease. Usually
λ is unknown. Small values of y are evidence for large values of λ; large values of
y are evidence for small values of λ.
Example 5.3 (Radioactive Decay)
It is well known that some chemical elements are radioactive. Every atom of a radioactive
element will eventually decay into smaller components. E.g., uranium-238 (by far the
most abundant uranium isotope, 238 U) decays into thorium-234 and an α particle while
plutonium-239 (the isotope used in nuclear weapons, 239 Pu) decays into uranium-235
(235 U) and an α particle.
(See http://www.epa.gov/radiation/radionuclides for more information.)
The time Y at which a particular atom decays is a random variable that has an
exponential distribution. Each radioactive isotope has its own distinctive value of λ. A
radioactive isotope is usually characterized by its median lifetime, or half-life, instead of
310
10
5.5. GAMMA, EXPONENTIAL, CHI SQUARE
0
2
4
p(x)
6
8
lambda = 2
lambda = 1
lambda = 0.2
lambda = 0.1
0.0
0.5
1.0
1.5
x
Figure 5.8: Exponential densities
2.0
5.5. GAMMA, EXPONENTIAL, CHI SQUARE
311
λ. The half-life is the value m which satisfies P[Y ≤ m] = P[Y ≥ m] = 0.5. The
half-life m can be found by solving
Z m
λ−1 e−y/λ dy = 0.5.
0
The answer is m = λ log 2. You will be asked to verify this claim in Exercise 28.
Uranium-238 has a half-life of 4.47 billion years. Thus its λ is about 6.45 billion.
Plutonium-239 has a half-life of 24,100 years. Thus its λ is about 35,000.
Exponential distributions have an interesting and unique memoryless property.
To demonstrate, we examine the Exp(λ) distribution as a model for T , the amount
of time a computer Help line caller spends on hold. Suppose the caller has already
spent t minutes on hold; i.e., T ≥ t. Let S be the remaing time on hold; i.e.,
S = T − t. What is the distribution of S given T > t? For any number r > 0,
P[S > r | T ≥ t] = P[T ≥ t + r | T ≥ t] =
=
P[T ≥ t + r, T ≥ t]
P[T ≥ t]
λ−1 e−(t+r)/λ
P[T ≥ t + r]
=
= e−r/λ .
P[T ≥ t]
λ−1 e−t/λ
In other words, S has an Exp(λ) distribution (Why?) that does not depend on
the currently elapsed time t (Why?). This is a unique property of the Exponential
distribution; no other continuous distribution has it. Whether it makes sense for
the amount of time on hold is a question that could be verified by looking at data.
If it’s not sensible, then Exp(λ) is not an accurate model for T .
Example 5.4
Some data here that don’t look exponential
The Poisson process There is a close relationship between Exponential, Gamma,
and Poisson distributions. For illustration consider a company’s customer call center. Suppose that calls arrive according to a rate λ such that
1. in a time interval of length T , the number of calls is a random variable with
distribution Poi(λT ) and
2. if I1 and I2 are disjoint time intervals then the number of calls in I1 is independent of the number of calls in I2 .
5.5. GAMMA, EXPONENTIAL, CHI SQUARE
312
When calls arrive in this way we say the calls follow a Poisson process.
Suppose we start monitoring calls at time t0 . Let T1 be the time of the first
call after t0 and Y1 = T1 − t0 , the time until the first call. T1 and Y1 are random
variables. What is the distribution of Y1 ? For any positive number y,
Pr[Y1 > y] = Pr[no calls in [t0 , t0 + y]] = e−λy
where the second equality follows by the Poisson assumption. But
Pr[Y1 > y] = e−λy ⇒ Pr[Y ≤ y] = 1 − e−λy ⇒ pY (y) = λe−λy ⇒ Y1 ∼ Exp(1/λ)
What about the time to the second call? Let T2 be the time of the second call after
t0 and Y2 = T2 − t0 . What is the distribution of Y2 ? For any y > 0,
Pr[Y2 > y] = Pr[fewer than 2 calls in [t0 , y]]
= Pr[0 calls in [t0 , y]] + Pr[1 call in [t0 , y]]
= e−λy + yλe−λy
and therefore
pY2 (y) = λe−λy − λe−λy + yλ2 e−λy =
λ2
ye−λy
Γ(2)
so Y2 ∼ Gam(2, 1/λ).
In general, the time Yn until the n’th call has the Gam(n, 1/λ) distribution. This
fact is an example of the following theorem.
Theorem 5.15. Let Y1 , . . . , Yn be mutually independent and let Yi ∼ Gam(αi , β).
Then
X
Y ≡
Yi ∼ Gam(α, β)
P
where α ≡
αi .
Proof. See Exercise 29.
In Theorem 5.15 note that the Yi ’s must all have the same β even though they
may have different αi ’s.
Poisson-Gamma conjugacy F = Gam/Gam
The Chi-squared Distribution The Gamma distribution with β = 2 and α = p/2
where p is a positive integer is called the chi-squared distribution with p degrees of
freedom. We write Y ∼ χ2p .
P
Theorem 5.16. Let Y1 , . . . , Yn ∼ i.i.d. N(0, 1). Define X = Yi2 . Then X ∼ χ2n .
Proof. This theorem will be proved in Section 5.7.
5.6. BETA
5.6
313
The Beta Distribution
For positive numbers α and β, the Beta(α, β) distribution is a distribution for a
random variable Y on the unit interval. The density is
pY (y) =
Γ(α + β) α−1
y (1 − y)β−1
Γ(α)Γ(β)
for y ∈ [0, 1]
The parameters are (α, β). We write Y ∼ Be(α, β). The mean and variance are
given by Theorem 5.17.
Theorem 5.17. Let Y ∼ Be(α, β). Then
α
E[Y ] =
α+β
Var(Y ) =
αβ
(α +
β)2 (α
+ β + 1)
Proof. See Exercise 25.
Figure 5.9 shows some Beta densities. Each panel shows four densities having
the same mean. It is evident from the Figure and the definition that the parameter
α (β) controls whether the density rises or falls at the left (right). If both α > 1 and
β > 1 then p(y) is unimodal. The Be(1, 1) is the same as the U(0, 1) distribution.
The Beta distribution arises as the distribution of order statistics from the U(0, 1)
distribution. Let x1 , . . . , xn ∼ i.i.d. U(0, 1). What is the distribution of x(1) , the first
order statistic? Our strategy is first to find the cdf of x(1) , then differentiate to get
the pdf.
FX(1) (x) = P[X(1) ≤ x]
= 1 − P[all Xi ’s are greater than x]
= 1 − (1 − x)n
Therefore,
pX(1) (x) =
Γ(n + 1)
d
FX(1) (x) = n(1 − x)n−1 =
(1 − x)n−1
dx
Γ(1)Γ(n)
which is the Be(1, n) density. For the distribution of the largest order statistic see
Exercise 26.
code for figure of beta densities?
The Beta density is closely related to the Gamma density by the following theorem.
5.6. BETA
314
8
a
4
0
2
p(y)
6
(a,b) = (0.3,1.2)
(a,b) = (1,4)
(a,b) = (3,12)
(a,b) = (10,40)
0.0
0.2
0.4
0.6
0.8
1.0
0.6
0.8
1.0
0.6
0.8
1.0
y
4
b
2
0
1
p(y)
3
(a,b) = (0.3,0.3)
(a,b) = (1,1)
(a,b) = (3,3)
(a,b) = (10,10)
0.0
0.2
0.4
y
6
(a,b) = (0.3,0.03)
(a,b) = (1,0.11)
(a,b) = (3,0.33)
(a,b) = (10,1.11)
0
2
4
p(y)
8 10
c
0.0
0.2
0.4
y
Figure 5.9: Beta densities — a: Beta densities with mean .2; b: Beta densities with
mean .5; c: Beta densities with mean .9;
5.7. NORMAL
315
Theorem 5.18. Let X1 ∼ Gam(α1 , β); X2 ∼ Gam(α2 , β); and X1 ⊥ X2 . Then
Y ≡
X1
∼ Be(α1 , α2 )
X 1 + X2
Proof. See Exercise 30.
Note that Theorem 5.18 requires X1 and X2 both to have the same value of β,
but the result doesn’t depend on what that value is.
5.7
5.7.1
The Normal and Related Distributions
The Univariate Normal Distribution
The histograms in Figure 1.12 on page 32
• are approximately unimodal,
• are approximately symmetric,
• have different means, and
• have different standard deviations.
Data with these properties is ubiquitous in nature. Statisticians and other scientists
often have to model similar looking data. One common probability density for
modelling such data is the Normal density, also known as the Gaussian density.
The Normal density is also important because of the Central Limit Theorem.
For some constants µ ∈ R and σ > 0, the Normal density is
p(x | µ, σ) = √
1 x−µ 2
1
e− 2 ( σ ) .
2πσ
(5.4)
Example 5.5 (Ocean temperatures, continued)
To see a Normal density in more detail, Figure 5.10 reproduces the top right histogram
from Figure 1.12 redrawn with the Normal density overlaid, for the values µ ≈ 8.08 and
σ ≈ 0.94. The vertical axis is drawn on the density scale. There are 112 temperature
measurements that go into this histogram; they were recorded between 1949 and 1997;
their latitudes are all between 44◦ and 46◦ ; their longitudes are all between −21◦ and
−19◦ .
316
0.2
0.0
density
0.4
5.7. NORMAL
4
6
8
10
12
temperature
Figure 5.10: Water temperatures (◦ C) at 1000m depth, 44 − 46◦ N latitude and
19 − 21◦ W longitude. The dashed curve is the N(8.08,0.94) density.
Figure 5.10 was produced by the following R snippet.
good <- abs ( med.1000$lon - lons[3] ) < 1 &
abs ( med.1000$lat - lats[1] ) < 1
temps <- med.1000$temp[good]
hist ( temps, xlim=c(4,12), breaks=seq(4,12,by=.5),
freq=F, xlab="temperature", ylab="density", main = "")
mu <- mean ( temps )
sig <- sqrt ( var ( temps ) )
x
<- seq ( 4, 12, length=60 )
lines ( x, dnorm(x,mu,sig), lty=2 )
Visually, the Normal density appears to fit the data well. Randomly choosing one of
the 112 historical temperature measurements, or making a new measurement near 45◦ N
and 20◦ W at a randomly chosen time are like drawing a random variable t from the
N(8.08,0.94) distribution.
Look at temperatures between 8.5◦ and 9.0◦ C. The N(8.08, 0.94) density says the
5.7. NORMAL
317
probability that a randomly drawn temperature t is between 8.5◦ and 9.0◦ C is
Z 9.0
1 t−8.08 2
1
√
P [t ∈ (8.5, 9.0]] =
e− 2 ( 0.94 ) dt ≈ 0.16.
2π 0.94
8.5
(5.5)
The integral in Equation 5.5 is best done on a computer, not by hand. In R it can be
done with pnorm(9.0,8.08,.94 ) - pnorm(8.5,8.08,.94 ). A fancier way to do it
is diff(pnorm(c(8.5,9),8.08,.94)).
• When x is a vector, pnorm(x,mean,sd) returns a vector of pnorm’s.
• When x is a vector, diff(x) returns the vector of differences x[2]-x[1],
x[3]-x[2], ..., x[n]-x[n-1].
In fact, 19 of the 112 temperatures fell into that bin, and 19/112 ≈ 0.17, so the
N(8.08, 0.94) density seems to fit very well.
However, the N(8.08, 0.94) density doesn’t fit as well for temperatures between 7.5◦
and 8.0◦ C.
Z 8.0
1 t−8.08 2
1
√
e− 2 ( 0.94 ) dt ≈ 0.20.
P [t ∈ (7.5, 8.0]] =
2π 0.94
7.5
In fact, 15 of the 112 temperatures fell into that bin; and 15/112 ≈ 0.13. Even so, the
N(8.08,0.94) density fits the data set very well.
Theorem 5.19. Let Y ∼ N(µ, σ). Then
MY (t) = e
σ 2 t2
+µt
2
.
Proof.
Z
1
2
1
ety √
e− 2σ2 (y−µ) dy
2πσ
Z
1
2
2
2
1
√
e− 2σ2 (y −(2µ−2σ t)y+µ ) dy
=
2πσ
Z
2 (µ+σ 2 t)2
µ2
1
2
1
− 2
2σ
√
=e
e− 2σ2 (y−(µ+σ t)) + 2σ2 dy
2πσ
MY (t) =
=e
2µσ 2 t+σ 4 t2
2σ 2
=e
σ 2 t2
+µt
2
.
5.7. NORMAL
318
The technique used in the proof of Theorem 5.19 is worth remembering, so let’s
look at it more abstractly. Apart from multiplicative constants, the first integral in
the proof is
Z
Z
1
2
ety e− 2σ2 (y−µ) dy =
1
2 +ty
e− 2σ2 (y−µ)
dy
The exponent is quadratic in y and therefore, for some values of a, b, c, d, e, and f
can be written
2
1
1 y−d
2
2
− 2 (y − µ) + ty = ay + by + c = −
+f
2σ
2
e
This last expression has the form of a Normal distribution with mean d and SD
e. So the integral can be evaluated by putting it in this form and manipulating
the constants so it becomes the integral of a pdf and therefore equal to 1. It’s a
technique that is often useful when working with integrals arising from Normal
distributions.
Theorem 5.20. Let Y ∼ N(µ, σ). Then
E[Y ] = µ
and
Var(Y ) = σ 2 .
Proof. For the mean,
E[Y ] = MY0 (0) = (tσ 2 + µ)e
σ 2 t2
+µt
2
= µ.
t=0
For the variance,
E[Y 2 ] = MY00 (0) = σ 2 e
σ 2 t2
+µt
2
+ (tσ 2 + µ)2 e
σ 2 t2
+µt
2
= σ 2 + µ2 .
t=0
So,
Var(Y ) = E[Y 2 ] − E[Y ]2 = σ 2 .
The N(0, 1) distribution is called the standard Normal distribution. As Theorem 5.21 shows, all Normal distributions are just shifted, rescaled versions of the
standard Normal distribution. The mean is a location parameter; the standard
deviation is a scale parameter. See Section 7.6.
Theorem 5.21.
5.7. NORMAL
319
1. If X ∼ N(0, 1) and Y = σX + µ then Y ∼ N(µ, σ).
2. If Y ∼ N(µ, σ) and X = (Y − µ)/σ then X ∼ N(0, 1).
Proof.
1. Let X ∼ N(0, 1) and Y = σX + µ. By Theorem 4.8
MY (t) = eµt MX (σt) = eµt e
σ 2 t2
2
2. Let Y ∼ N(µ, σ) and X = (Y − µ)/σ. Then
MX (t) = e−µt/σ MY (t/σ) = e−µt/σ e
σ 2 (t/σ)2
+µt/σ
2
t2
=e2
Section 5.5 introduced the χ2 distribution, noting that it is a special case of the
Gamma distribution. The χ2 distribution arises in practice as a sum of squares of
standard Normals. Here we restate Theorem 5.16, then prove it.
Theorem 5.22. Let Y1 , . . . , Yn ∼ i.i.d. N(0, 1). Define X =
P
Yi2 . Then X ∼ χ2n .
Proof. Start with the case n = 1.
Z
y2
1
2
MX (t) = E[e ] = ety √ e− 2 dy
2π
Z
1 − 1 (1−2t)y2
√ e 2
=
dy
2π
Z √
1 − 2t − 1 (1−2t)y2
−1/2
√
= (1 − 2t)
e 2
dy
2π
= (1 − 2t)−1/2
tY12
So X ∼ Gam(1/2, 2) = χ21 .
If n > 1 then by Corollary 4.10
MX (t) = MY12 +···+Yn2 (t) = (1 − 2t)−n/2
So X ∼ Gam(n/2, 2) = χ2n .
5.7. NORMAL
5.7.2
320
The Multivariate Normal Distribution
~ be an n-dimensional random vector with mean µ ~ and covariance matrix
Let X
X
~ has a multivariate Normal distribution if its joint density is
ΣX~ . We say that X
pX~ (~x) =
1
1
1
(2π)n/2 |Σ| 2
t
−1 (~
x−µX
~)
e− 2 (~x−µX~ ) Σ
(5.6)
~ ∼ N(µ, Σ). Comwhere |Σ| refers to the determinant of the matrix Σ. We write X
parison of Equations 5.4 (page 315) and 5.6 shows that the latter is a generalization of the former. The multivariate version has the covariance matrix Σ in place
of the scalar variance σ 2 .
To become more familiar with the multivariate Normal distribution, we begin
with the case where the covariance matrix is diagonal:
2
σ1 0 0 · · ·
0 σ22 0 · · ·
..
Σ=
..
.
0
0
.
..
..
.
. · · · σ2
n
In this case the joint density is
pX~ (~x) =
1
1
1
2
t
−1 (~
x−µX
~)
e− 2 (~x−µX~ ) Σ
(2π)n/2 |Σ|
1 Pn (xi −µi )2
n Y
n −
1
1
i=1
σ2
i
= √
e 2
σ
2π
i
i=1
“
”2 n Y
x −µ
1
− 12 iσ i
i
√
=
e
,
2πσi
i=1
the product of n separate one dimensional Normal densities, one for each dimension. Therefore the Xi ’s are independent and Normally distributed, with Xi ∼
N(µi , σi ). Also see Exercise 31.
When σ1 = · · · = σn = 1, then Σ is the n-dimensional identity matrix In . When,
~ ∼ N(0, In ) and X
~ is said to have the
in addition, µ1 = · · · = µn = 0, then X
standard n-dimensional Normal distribution.
Note: for two arbitrary random variables X1 and X2 , X1 ⊥ X2 implies Cov(X1 , X2 ) =
0; but Cov(X1 , X2 ) = 0 does not imply X1 ⊥ X2 . However, if X1 and X2 are jointly
Normally distributed then the implication is true. I.e. if (X1 , X2 ) ∼ N(µ, Σ) and
5.7. NORMAL
321
Cov(X1 , X2 ) = 0, then X1 ⊥ X2 . In fact, something stronger is true, as recorded in
the next theorem.
~ = (X1 , . . . , Xn ) ∼ N(µ, Σ)
Theorem 5.23. Let X
diagonal form
Σ11 012
···
021 Σ22
···
Σ = ..
..
..
.
.
.
0m1 · · · 0mm−1
where Σ has the so-called block
01m
02m
..
.
Σmm
P
where Σii is an ni × ni matrix, 0ij is an ni × nj matrix of 0’s and m
1 ni = n. Partition
~
~
~
~
X to conform with Σ and define Yi ’s: Y1 = (X1 , . . . , Xn1 ), Y2 = (Xn1 +1 , . . . , Xn1 +n2 ),
. . . , Y~m = (Xn1 +···+nm−1 +1 , . . . , Xnm ) and νi ’s: ν1 = (µ1 , . . . , µn1 ), ν2 = (µn1 +1 , . . . , µn1 +n2 ),
. . . , νm = (µn1 +···+nm−1 +1 , . . . , µnm ). Then
1. The Y~i ’s are independent of each other, and
2. Y~i ∼ N(νi , Σii )
~ → (Y~1 , . . . , Y~m ) is just the identity transformation, so
Proof. The transformation X
pY~1 ,...,Y~m (~y1 , . . . , ~ym )
= pX~ (~y1 , . . . , ~ym ) =
=
(2π)
1
Qm
n/2
i=1
1
1
(2π)n/2 |Σ|
1
|Σii |
1
2
e− 2
1
2
t
−1 (~
y −µ)
e− 2 (~y−µ) Σ
yi −νi )t Σ−1
yi −νi )
i=1 (~
ii (~
Pm
=
m
Y
1
ni /2 |Σ |
ii
i=1 (2π)
1
1
2
t
−1
e− 2 (~yi −νi ) Σii
(~
yi −νi )
To learn more about the multivariate Normal density, look at the curves on
which pX~ is constant; i.e., {~x : pX~ (~x) = c} for some constant c. The density depends
on the xi ’s through the quadratic form (~x − µ)t Σ−1 (~x − µ), so pX~ is constant where
this
form is constant. But when Σ is diagonal, (~x − µ)t Σ−1 (~x − µ) =
Pn quadratic
2
2
x) = c is the equation of an ellipsoid centered at µ and with
~ (~
1 (xi − µi ) /σi so pX
eccentricities determined by the ratios σi /σj .
What does this density look like? It is easiest to answer that question in two
dimensions. Figure 5.11 shows three bivariate Normal densities. The left-hand column shows contour plots of the bivariate densities; the right-hand column shows
5.7. NORMAL
322
samples from the joint distributions. In all cases, E[X1 ] = E[X2 ] = 0. In the
top row, σX1 = σX2 = 1; in the second row, σX1 = 1; σX2 = 2; in the third row,
σX1 = 1/2; σX2 = 2. The standard deviation is a scale parameter, so changing the
SD just changes the scale of the random variable. That’s what gives the second
and third rows more vertical spread than the first, and makes the third row more
horizontally squashed than the first and second.
Figure 5.11 was produced with the following R code.
par ( mfrow=c(3,2) ) # a 3 by 2 array of plots
x1 <- seq(-5,5,length=60)
x2 <- seq(-5,5,length=60)
den.1 <- dnorm ( x1, 0, 1 )
den.2 <- dnorm ( x2, 0, 1 )
den.jt <- den.1 %o% den.2
contour ( x1, x2, den.jt, xlim=c(-5,5), ylim=c(-5,5), main="(a)",
xlab=expression(x[1]), ylab=expression(x[2]) )
samp.1 <- rnorm ( 300, 0, 1 )
samp.2 <- rnorm ( 300, 0, 1 )
plot ( samp.1, samp.2, xlim=c(-5,5), ylim=c(-5,5), main="(b)",
xlab=expression(x[1]), ylab=expression(x[2]), pch="." )
den.2 <- dnorm ( x2, 0, 2 )
den.jt <- den.1 %o% den.2
contour ( x1, x2, den.jt, xlim=c(-5,5), ylim=c(-5,5), main="(c)",
xlab=expression(x[1]), ylab=expression(x[2]), )
samp.2 <- rnorm ( 300, 0, 2 )
plot ( samp.1, samp.2, xlim=c(-5,5), ylim=c(-5,5), main="(d)",
xlab=expression(x[1]), ylab=expression(x[2]), pch="." )
den.1 <- dnorm ( x1, 0, .5 )
den.jt <- den.1 %o% den.2
contour ( x1, x2, den.jt, xlim=c(-5,5), ylim=c(-5,5), main="(e)",
xlab=expression(x[1]), ylab=expression(x[2]) )
samp.1 <- rnorm ( 300, 0, .5 )
5.7. NORMAL
323
2
!4
0
2
4
!4
0
x1
x1
(c)
(d)
2
4
2
4
2
4
2
!4
0
x2
2
0
!4
0
2
4
!4
!2
0
x1
x1
(e)
(f)
2
!4
!4
0
x2
2
4
!2
4
!4
0
x2
!2
4
!2
4
!4
x2
0
x2
0
!4
x2
2
4
(b)
4
(a)
!4
!2
0
2
4
!4
x1
Figure 5.11: Bivariate Normal density. E[X1 ] = E[X2 ] = 0.
(a), (b): σX1 = σX2 = 1.
(c), (d): σX1 = 1; σX2 = 2.
(e), (f): σX1 = 1/2; σX2 = 2.
(a), (c), (e): contours of the joint density.
(b), (d), (f): samples from the joint density.
!2
0
x1
5.7. NORMAL
324
plot ( samp.1, samp.2, xlim=c(-5,5), ylim=c(-5,5), main="(f)",
xlab=expression(x[1]), ylab=expression(x[2]), pch="." )
• The code makes heavy use of the fact that X1 and X2 are independent for (a)
calculating the joint density and (b) drawing random samples.
• den.1 %o% den.2 yields the outer product of den.1 and den.2. It is a matrix
whose ij’th entry is den.1[i] * den.2[j].
Now let’s see what happens when Σ is not diagonal. Let Y ∼ N(µY~ , ΣY~ ), so
pY~ (~y ) =
1
(2π)n/2 |Σ
1
~|
Y
1
2
t
−1
e− 2 (~y−µY~ ) ΣY~
(~
y −µY~ )
,
~ ∼ N(0, In ). X
~ is just a collection of independent N(0, 1) random variand let X
ables. Its curves of constant density are just (n−1)-dimensional spheres centered at
~ + µ. We will show that p ~ = p ~ , therefore that Z
~ and
~ = Σ1/2 X
the origin. Define Z
Z
Y
Y~ have the same distribution, and therefore that any multivariate Normal random
vector has the same distribution as a linear transformation of a standard multivariate Normal random vector. To show pZ~ = pY~ we apply Theorem 4.4. The Jacobian
~ to Z
~ is |Σ|1/2 , the square root of the determinant of
of the transformation from X
Σ. Therefore,
pZ~ (~y ) = pX~ Σ−1/2 (~y − µ) |Σ|−1/2
1
−1/2
t
−1/2
= √ n e−1/2(Σ (~y−µ)) (Σ (~y−µ)) |Σ|−1/2
2π
1
1
t −1
=
e− 2 (~y−µ) Σ (~y−µ)
n/2
1/2
(2π) |Σ|
= pY~ (~y )
The preceding result says that any multivariate Normal random variable, Y~ in our
notation above, has the same distribution as a linear transformation of a standard
Normal random variable.
To see what multivariate Normal densities look like it is easiest to look at
2 dimensions. Figure 5.12 shows three bivariate Normal densities. The lefthand column shows contour plots of the bivariate densities; the right-hand column
shows samples from the joint distributions. In all cases, E[X1 ] = E[X2 ] = 0 and
5.7. NORMAL
325
2
!4
0
2
4
!4
0
x1
x1
c
d
2
4
2
4
2
4
2
!4
0
x2
2
0
!4
0
2
4
!4
!2
0
x1
x1
e
f
2
!4
!4
0
x2
2
4
!2
4
!4
0
x2
!2
4
!2
4
!4
x2
0
x2
0
!4
x2
2
4
b
4
a
!4
!2
0
x1
2
4
!4
!2
0
x1
Figure 5.12: Bivariate Normal density. E[X1 ] = E[X2 ] = 0; σ1 = σ2 = 1.
(a), (b): σ1,2 = 0.
(c), (d): σ1,2 = .5.
(e), (f): σ1,2 = −.8.
(a), (c), (e): contours of the joint density.
(b), (d), (f): samples from the joint density.
5.7. NORMAL
326
σ1 = σ2 = 1. In the top row, σ1,2 = 0; in the second row, σ1,2 = .5; in the third row,
σ1,2 = −.8.
Figure 5.12 was produced with the following R code.
par ( mfrow=c(3,2) ) # a 3 by 2 array of plots
npts <- 60
sampsize <- 300
x1 <- seq(-5,5,length=npts)
x2 <- seq(-5,5,length=npts)
Sigma <- array ( NA, c(3,2,2) )
Sigma[1,,] <- c(1,0,0,1)
Sigma[2,,] <- c(1,.5,.5,1)
Sigma[3,,] <- c(1,-.8,-.8,1)
den.jt <- matrix ( NA, npts, npts )
for ( i in 1:3 )
Sig <- Sigma[i,,]
Siginv <- solve(Sig) # matrix inverse
for ( j in 1:npts )
for ( k in 1:npts )
x <- c ( x1[j], x2[k] )
den.jt[j,k] <- ( 1 / sqrt(2*pi*det(Sig)) ) *
exp ( -.5 * t(x) %*% Siginv %*% x )
contour ( x1, x2, den.jt, xlim=c(-5,5), ylim=c(-5,5),
drawlabels=F,
xlab=expression(x[1]),
ylab=expression(x[2]), main=letters[2*i-1] )
samp <- matrix ( rnorm ( 2*sampsize ), 2, sampsize )
samp <- Sig %*% samp
plot ( samp[1,], samp[2,], pch=".",
xlim=c(-5,5), ylim=c(-5,5),
xlab=expression(x[1]),
ylab=expression(x[2]), main=letters[2*i] )
5.7. NORMAL
327
We conclude this section with some theorems about Normal random variables
that will prove useful later.
~ ∼ N(µ, Σ) be an n-dimensional Normal random variable; let
Theorem 5.24. Let X
A be a full rank n by n matrix; and let Y = AX. Then Y ∼ N(Aµ, AΣAt ).
Proof. By Theorem 4.4 (pg. 268),
pY~ (~y ) = pX~ (A−1 ~y )|A−1 |
1
t −1 (A−1 ~
− 12 (A−1 ~
y −µX
y −µX
~) Σ
~)
=
1 e
n/2
2
(2π) |A||Σ|
1
t −1 (A−1 (~
− 12 (A−1 (~
y −AµX
y −AµX
~ )) Σ
~ ))
=
1 e
n/2
2
(2π) |A||Σ|
1
t
−1 )t Σ−1 A−1 (~
− 12 (~
y −AµX
y −AµX
~ ) (A
~)
=
1 e
n/2
(2π) |A||Σ| 2
1
t
t −1 (~
− 12 (~
y −AµX
y −AµX
~ ) (AΣA )
~)
=
1 e
n/2
t
(2π) |AΣA | 2
which we recognize as the N(Aµ, AΣAt ) density.
~ ∼ N(µ, Σ) be an n-dimensional Normal random variable; let
Corollary 5.25. Let X
A be a full rank n by n matrix; let b be a vector of length n; and let Y = AX + b.
Then Y ∼ N(Aµ + b, AΣAt ).
Proof. See Exercise 32.
Corollary 5.26. Let X1 , . . . , Xn ∼ i.i.d. N(µ, σ). Define S 2 ≡
X̄ ⊥ S 2 .
Proof. Define the random vector Y~ = (Y1 , . . . , Yn )t by
Y1 = X1 − X̄
Y2 = X2 − X̄
..
.
Yn−1 = Xn−1 − X̄
Yn = X̄
The proof follows these steps.
Pn
i=1 (Xi
− X̄)2 . Then
5.8. T AND F
328
1. S 2 is a function only of (Y1 , . . . , Yn−1 )t ; i.e. not a function of Yn .
2. (Y1 , . . . , Yn−1 )t ⊥ Yn .
3. Therefore S 2 ⊥ Yn .
1.
Pn
i=1 (Xi
− X̄) = 0. Therefore, (Xn − X̄) = −
n−1
X
S2 =
(Xi − X̄)2 +
i=1
n−1
X
Pn−1
i=1
!2
(Xi − X̄)
i=1
=
(Xi − X̄). And therefore
n−1
X
i=1
Yi2 +
n−1
X
!2
Yi
i=1
is a function of (Y1 , . . . , Yn−1 )t .
2.
· · · − n1
1 − n1 − n1 − n1
−1 1 − 1 −1
· · · − n1
n
n
n
..
..
..
.. X
~ ≡ AX
~
Y~ = ...
.
.
.
.
1
1
1
1
−n
−n
· · · 1 − n −n
1
1
1
1
···
n
n
n
n
where the matrix A is defined by the preceding equation, so
Y~ ∼ N(Aµ, σ 2 AAt ). The first n − 1 rows of A are each orthogonal to the last
row. Therefore
Σ11 ~0
t
AA = ~ t
0 1/n
where Σ11 has dimension (n − 1) × (n − 1) and ~0 is the (n − 1)-dimensional
vector of 0’s. Thus, by Theorem 5.23, (Y1 , . . . , Yn−1 )t ⊥ Yn .
3. Follows immediately from 1 and 2.
5.8
5.8.1
The t and F Distributions
The t distribution
The t distribution arises when making inference about the mean of a Normal distribution.
5.8. T AND F
329
Let X1 , . . . , Xn ∼ i.i.d. N(µ, σ) where both µ and σ are unknown, and suppose
our goal is to√estimate µ. µ̂ = X̄ is a sensible estimator. Its sampling distribution is
X̄ ∼ N(µ, σ/ n) or, equivalently,
X̄ − µ
√ ∼ N(0, 1)
σ/ n
We would like to use this equation to tell us how √
accurately we can estimate µ.
Apparently we can estimate µ to within about ±2σ/ n most of the time. But that’s
not an immediately useful statement because we don’t know σ. So we estimate σ
1/2
P
by σ̂ = n−1 (Xi − X̄)2
and say
X̄ − µ
√ ∼ N(0, 1),
σ̂/ n
√
approximately. This section derives the exact distribution of (X̄ − µ)/(σ̂/ n) and
assesses how good the Normal approximation is. We already know from Corollary 5.26 that X̄ ⊥ σ̂. Theorem 5.28 gives the distribution of S 2 = nσ̂ 2 =
P
(Xi − X̄)2 . First we need a lemma.
Lemma 5.27. Let V = V1 + V2 and W = W1 + W2 where V1 ⊥ V2 and W1 ⊥ W2 . If V
and W have the same distribution, and if V1 and W1 have the same distribution, then
V2 and W2 have the same distribution.
Proof. Using moment generating functions,
MV2 (t) = MV (t)/MV1 (t)
= MW (t)/MW1 (t)
= MW2 (t)
Theorem 5.28. Let X1 , . . . , Xn ∼ i.i.d. N(µ, σ). Define S 2 =
S2
∼ χ2n−1 .
σ2
Proof. Let
V =
2
n X
Xi − µ
i=1
σ
.
Pn
i=1 (Xi
− X̄)2 . Then
5.8. T AND F
330
Then V ∼ χ2n and
2
n X
(Xi − X̄) + (X̄ − µ)
V =
σ
i=1
2
n
n
2
X
X
Xi − X̄
X̄ − µ
=
+n
+ 2(X̄ − µ)
(Xi − X̄)
σ
σ
i=1
i=1
2
2 n X
Xi − X̄
X̄ − µ
√
=
+
σ
σ/
n
i=1
≡
S2
+ V2
σ2
where S 2 /σ 2 ⊥ V2 and V2 ∼ χ21 . But also,
V =
2
n−1 X
Xi − µ
σ
i=1
+
Xn − µ
σ
2
≡ W1 + W2
where W1 ⊥ W2 , W1 ∼ χ2n−1 and W2 ∼ χ21 . Now the conclusion follows by
Lemma 5.27.
Define
r
T ≡
n−1
n
X̄ − µ
√
σ̂/ n
√
n(X̄ − µ)/σ
=p
.
S 2 /(n − 1)σ 2
Then
T has the distribution of
p by Corollary 5.26 and Theorem 5.28,
2
U/ V /(n − 1) where U ∼ N(0, 1), V ∼ χn−1 , and U ⊥ V . This distribution is called
the t distribution with n − 1 degrees of freedom. We write T ∼ tn−1 . Theorem 5.29
derives its density.
p
Theorem 5.29. Let U ∼ N(0, 1), V ∼ χ2p , and U ⊥ V . Then T ≡ U/ V /p ∼ χ2p has
density
p
p+1
p+1
2 − 2
− p+1
Γ( p+1
)p 2 2
Γ(
)
t
2
2
2
√
pT (t) =
t +p
= p √
1+
.
Γ( 2 ) pπ
p
Γ( p2 ) π
Proof. Define
U
T =p
V /p
and
Y =V
5.8. T AND F
331
We make the transformation (U, V ) → (T, Y ), find the joint density of (T, Y ), and
then the marginal density of T . The inverse transformation is
1
TY 2
U= √
p
The Jacobian is
dU
dT
dV
dT
dU dY dV dY
and
1
Y 2
√
= p
0
V =Y
Y 12
= √
p
1 1
T Y√− 2
2 p
The joint density of (U, V ) is
p
u2
1
1
−1 − v2
2
pU,V (u, v) = √ e− 2
e .
p v
p
Γ( 2 )2 2
2π
Therefore the joint density of (T, Y ) is
1
2
t2 y
p
1
1
−1 − y2 y
2
pT,Y (t, y) = √ e− p
e √
p y
p
p
Γ( 2 )2 2
2π
and the marginal density of T is
Z
pT (t) = pT,Y (t, y) dy
1
=√
p√
2πΓ( p2 )2 2 p
Z
∞
y
p+1
−1
2
y t2
e− 2 ( p +1) dy
0
p+1
2
p+1
2p
=√
Γ(
)
p+1 √
2
t2 + p
πΓ( p2 )2 2 p
Z ∞
y
p+1
1
−1 − 2p/(t2 +p)
2
×
y
e
dy
p+1
2
0
p+1
2p
Γ( 2 ) t2 +p
1
− p+1
Γ( p+1
)pp/2 2
2
2
=
t +p
p √
Γ( 2 ) π
− p+1
2
Γ( p+1
)
t2
2
= p √
1+
.
Γ( 2 ) pπ
p
5.8. T AND F
332
Figure 5.8.1 shows the t density for 1, 4, 16, and 64 degrees of freedom, and
the N(0, 1) density. The two points to note are
1. The t densities are unimodal and symmetric about 0, but have less mass in
the middle and more mass in the tails than the N(0, 1) density.
2. In the limit, as p → ∞, the tp density appears to approach the N(0, 1) density.
(The appearance is correct. See Exercise 33.)
Figure 5.8.1 was produced with the following snippet.
x <- seq ( -5, 5, length=100 )
dens <- cbind ( dt(x,1), dt(x,4), dt(x,16), dt(x,64),
dnorm(x) )
matplot ( x, dens, type="l", ylab="density", xlab="t",
lty=c(2:5,1), col=1 )
legend ( x=-5, y=.4, lty=c(2:5,1),
legend=c ( paste("df = ", c(1,4,16,64)),
"Normal" ) )
√
At the beginning of Section 5.8.1 we said the quantity n(X̄ − µ)/σ̂ had a
N(0, 1) distribution,
approximately. Theorem 5.29 derives the density of the related
√
quantity n − 1(X̄ −µ)/σ̂ which has a tn−1 distribution, exactly. Figure 5.8.1 shows
how similar those distributions are. The t distribution has slightly more spread than
the N(0, 1) distribution, reflecting the fact that σ has to be estimated. But when n is
large, i.e. when σ is well estimated, then the two distributions are nearly identical.
If T ∼ tp , then
)
Γ( p+1
2
E[T ] =
t p √
−∞ Γ( 2 ) pπ
Z
∞
− p+1
2
t2
1+
dt
p
(5.7)
In the limit as t → ∞, the integrand behaves like t−p ; hence 5.7 is integrable if
and only if p > 1. Thus the t1 distribution, also known as the Cauchy distribution,
has no mean. When p > 1, E[T ] = 0, by symmetry. By a similar argument, the
tp distribution has a variance if and only if p > 2. When p > 2, then Var(T ) =
p/(p − 2). In general, T has a k-th moment (E[T k ] < ∞) if and only if p > k.
333
0.4
5.8. T AND F
0.2
0.0
0.1
density
0.3
df = 1
df = 4
df = 16
df = 64
Normal
!4
!2
0
2
4
t
Figure 5.13: t densities for four degrees of freedom and the N(0, 1) density
5.9. EXERCISES
5.8.2
5.9
334
The F distribution
Exercises
1. Prove Theorem 5.4 by moment generating functions.
2. Refer to Theorem 5.8.
(a) What was the point of the next to last step?
(b) Justify the last step.
3. Assume that all players on a basketball team are 70% free throw shooters
and that free throws are independent of each other.
(a) The team takes 40 free throws in a game. Write down a formula for
the probability that they make exactly 37 of them. You do not need to
evaluate the formula.
(b) The team takes 20 free throws the next game. Write down a formula for
the probability that they make exactly 9 of them.
(c) Write down a formula for the probability that the team makes exactly
37 free throws in the first game and exactly 9 in the second game. That
is, write a formula for the probability that they accomplish both feats.
4. Write down the distribution you would use to model each of the following
random variables. Be as specific as you can. I.e., instead of answering “Poisson distribution”, answer “Poi(3)” or instead of answering “Binomial”, answer
“Bin(n, p) where n = 13 but p is unknown.”
(a) The temperature measured at a randomly selected point on the surface
of Mars.
(b) The number of car accidents in January at the corner of Broad Street
and Main Street.
(c) Out of 20 people in a post office, the number who, when exposed to
anthrax spores, actually develop anthrax.
(d) Out of 10,000 people given a smallpox vaccine, the number who develop
smallpox.
(e) The amount of Mercury in a fish caught in Lake Ontario.
5.9. EXERCISES
335
5. A student types dpois(3,1.5) into R. R responds with 0.1255107.
(a) Write down in words what the student just calculated.
(b) Write down a mathematical formula for what the student just calculated.
6. Name the distribution. Your answers should be of the form Poi(λ) or N(3, 22),
etc. Use numbers when parameters are known, symbols when they’re not.
You spend the evening at the roulette table in a casino. You bet on red 100
times. Each time the chance of winning is 18/38. If you win, you win $1;
if you lose, you lose $1. The average amount of time between bets is 90
seconds; the standard deviation is 5 seconds.
(a) the number of times you win
(b) the number of times you lose
(c) the number of bets until your third win
(d) the number of bets until your thirtieth loss
(e) the amount of time to play your first 40 bets
(f) the additional amount of time to play your next 60 bets
(g) the total amount of time to play your 100 bets
(h) your net profit at the end of the evening
(i) the amount of time until a stranger wearing a red carnation sits down
next to you
(j) the number of times you are accidentally jostled by the person standing
behind you
7. A golfer plays the same golf course daily for a period of many years. You may
assume that he does not get better or worse, that all holes are equally difficult
and that the results on one hole do not influence the results on any other
hole. On any one hole, he has probabilities .05, .5, and .45 of being under
par, exactly par, and over par, respectively. Write down what distribution best
models each of the following random variables. Be as specific as you can. I.e.,
instead of answering "Poisson distribution" answer "Poi(3)" or "Poi(λ) where
λ is unknown." For some parts the correct answer might be "I don’t know."
(a) X, the number of holes over par on 17 September, 2002
(b) W, the number of holes over par in September, 2002
5.9. EXERCISES
336
(c) Y, the number of rounds over par in September, 2002
(d) Z, the number of times he is hit by lightning in this decade
(e) H, the number of holes-in-one this decade
(f) T, the time, in years, until his next hole-in-one
8. During a CAT scan, a source (your brain) emits photons which are counted
by a detector (the machine). The detector is mounted at the end of a long
tube, so only photons that head straight down the tube are detected. In
other words, though the source emits photons in all directions, the only ones
detected are those that are emitted within the small range of angles that lead
down the tube to the detector.
Let X be the number of photons emitted by the source in 5 seconds. Suppose
the detector captures only 1% of the photons emitted by the source. Let Y be
the number of photons captured by the detector in those same 5 seconds.
(a) What is a good model for the distribution of X?
(b) What is the conditional distribution of Y given X?
(c) What is the marginal distribution of Y?
Try to answer these questions from first principles, without doing any calculations.
9. (a) Prove Theorem 5.11 using moment generating functions.
(b) Prove Theorem 5.12 using moment generating functions.
10. (a) Prove Theorem 5.14 by finding E[Y 2 ] using the trick that was used to
prove Theorem 5.12.
(b) Prove Theorem 5.14 by finding E[Y 2 ] using moment generating functions.
11. Case Study 4.2.3 in Larsen and Marx [add reference] claims that the number
of fumbles per team in a football game is well modelled by a Poisson(2.55)
distribution. For this quiz, assume that claim is correct.
(a) What is the expected number of fumbles per team in a football game?
(b) What is the expected total number of fumbles by both teams?
(c) What is a good model for the total number of fumbles by both teams?
5.9. EXERCISES
337
(d) In a game played in 2002, Duke fumbled 3 times and Navy fumbled 4
times. Write a formula (Don’t evaluate it.) for the probability that Duke
will fumble exactly 3 times in next week’s game.
(e) Write a formula (Don’t evaluate it.) for the probability that Duke will
fumble exactly three times given that they fumble at least once.
12. Clemson University, trying to maintain its superiority over Duke in ACC football, recently added a new practice field by reclaiming a few acres of swampland surrounding the campus. However, the coaches and players refused
to practice there in the evenings because of the overwhelming number of
mosquitos.
To solve the problem the Athletic Department installed 10 bug zappers around
the field. Each bug zapper, each hour, zaps a random number of mosquitos
that has a Poisson(25) distribution.
(a) What is the exact distribution of the number of mosquitos zapped by 10
zappers in an hour? What are its expected value and variance?
(b) What is a good approximation to the distribution of the number of
mosquitos zapped by 10 zappers during the course of a 4 hour practice?
(c) Starting from your answer to the previous part, find a random variable
relevant to this problem that has approximately a N(0,1) distribution.
13. Bob is a high school senior applying to Duke and wants something that will
make his application stand out from all the others. He figures his best chance
to impress the admissions office is to enter the Guinness Book of World
Records for the longest amount of time spent continuously brushing one’s
teeth with an electric toothbrush. (Time out for changing batteries is permissible.) Batteries for Bob’s toothbrush last an average of 100 minutes each,
with a variance of 100. To prepare for his assault on the world record, Bob
lays in a supply of 100 batteries.
The television cameras arrive along with representatives of the Guinness company and the American Dental Association and Bob begins the quest that he
hopes will be the defining moment of his young life. Unfortunately for Bob
his quest ends in humiliation as his batteries run out before he can reach the
record which currently stands at 10,200 minutes.
Justice is well served however because, although Bob did take AP Statistics
in high school, he was not a very good student. Had he been a good statistics
5.9. EXERCISES
338
student he would have calculated in advance the chance that his batteries
would run out in less than 10,200 minutes.
Calculate, approximately, that chance for Bob.
14. An article on statistical fraud detection (Bolton and Hand [1992]), when
talking about records in a database, says:
"One of the difficulties with fraud detection is that typically there are many
legitimate records for each fraudulent one. A detection method which correctly identifies 99% of the legitimate records as legitimate and 99% of the
fraudulent records as fraudulent might be regarded as a highly effective system. However, if only 1 in 1000 records is fraudulent, then, on average, in
every 100 that the system flags as fraudulent, only about 9 will in fact be so."
QUESTION: Can you justify the "about 9"?
15. [credit to FPP here, or change the question.] In 1988 men averaged
around 500 on the math SAT, the SD was around 100 and the histogram
followed the normal curve.
(a) Estimate the percentage of men getting over 600 on this test in 1988.
(b) One of the men who took the test in 1988 will be picked at random, and
you have to guess his test score. You will be given a dollar if you guess
it right to within 50 points.
i. What should you guess?
ii. What is your chance of winning?
16. Multiple choice.
(a) X ∼ Poi(λ). Pr[X ≤ 7] =
P7
−λ x
i.
λ /x!
x=−∞ e
P7
ii.
e−λ λx /x!
P7x=0 −λ x
iii.
λ /x!
λ=0 e
(b) X and Y are distributed uniformly on the unit square.
Pr[X ≤ .5|Y ≤ .25] =
i. .5
ii. .25
iii. can’t tell from the information given.
5.9. EXERCISES
339
(c) X ∼ Normal(µ, σ 2 ). Pr[X > µ + σ]
i. is more than .5
ii. is less than .5
iii. can’t tell from the information given.
(d) X1 , . . . , X100 ∼ N(0, 1). X̄ ≡ (X1 +· · ·+X100 )/100. Y ≡ (X1 +· · ·+X100 ).
Calculate
Pr[−.2 ≤ X̄ ≤ .2]
Pr[−.2 ≤ Xi ≤ .2]
Pr[−.2 ≤ Y ≤ .2]
Pr[−2 ≤ X̄ ≤ 2]
Pr[−2 ≤ Xi ≤ 2]
Pr[−2 ≤ Y ≤ 2]
Pr[−20 ≤ X̄ ≤ 20]
Pr[−20 ≤ Xi ≤ 20]
Pr[−20 ≤ Y ≤ 20]
P
(e) X ∼ Bin(100, θ). 100
θ=0 f (x|θ) =
i.
ii.
iii.
iv.
v.
vi.
vii.
viii.
ix.
i. 1
ii. the question doesn’t make sense
iii. can’t tell from the information given.
(f) X and Y have joint density f (x, y) on the unit square. f (x) =
R1
i. 0 f (x, y) dx
R1
ii. 0 f (x, y) dy
Rx
iii. 0 f (x, y) dy
(g) X1 , . . . , Xn ∼ Gamma(r, λ) and are mutually independent.
f (x1 , . . . , xn ) =
P
Q
i. [λr /(r − 1)!]( xi )r−1 e−λ xi
Q
Q
ii. [λnr /((r − 1)!)n ]( xi )r−1 e−λ xi
P
Q
iii. [λnr /((r − 1)!)n ]( xi )r−1 e−λ xi
17. In Figure 5.2, the plots look increasingly Normal as we go down each column.
Why? Hint: a well-known theorem is involved.
18. Prove Theorem 5.7.
5.9. EXERCISES
340
19. Prove a version of Equation 5.1 on page 291. Let k = 2. Start from the joint
pmf of Y1 and Y2 (Use Theorem 5.7.), derive the marginal pmf of Y1 , and
identify it.
20. Rongelap Island, Poisson distribution
21. seed rain, Poisson distribution
22. (a) Let Y ∼ U(1, n) where the parameter n is an unknown positive integer.
Suppose we observe Y = 6. Find the m.l.e. n̂. Hint: Equation 5.2 defines
the pmf for y ∈ {1, 2, . . . , n}. What is p(y) when y 6∈ {1, 2, . . . , n}?
(b) In World War II, when German tanks came from the factory they had
serial numbers labelled consecutively from 1. I.e., the numbers were 1,
2, . . . . The Allies wanted to estimate T , the total number of German
tanks and had, as data, the serial numbers of the tanks they had captured. Assuming that tanks were captured independently of each other
and that all tanks were equally likely to be captured find the m.l.e. T̂ .
23. Let Y be a continuous random variable, Y ∼ U(a, b).
(a) Find E[Y ].
(b) Find Var(Y ).
(c) Find MY (t).
24. (a) Is there a discrete distribution that is uniform on the positive integers?
Why or why not? If there is such a distribution then we might call it
U(1, ∞).
(b) Is there a continuous distribution that is uniform on the real line? Why
or why not? If there is, then we might call it U(−∞, ∞).
25. Prove Theorem 5.17. Hint: Use the method of Theorem 5.12.
26. Let x1 , . . . , xn ∼ i.i.d. U(0, 1). Find the distribution of x(n) , the largest order
statistic.
27. In the R code to create Figure 2.19, explain how to use dgamma(...) instead
of dpois(...).
28. Prove the claim on page 311 that the half-life of a radioactive isotope is m =
λ log 2.
5.9. EXERCISES
341
29. Prove Theorem 5.15.
30. Prove Theorem 5.18.
31. Page 320 shows that the n-dimensional Normal density with a diagonal covariance matrix is the product of n separate univariate Normal densities. In
this problem you are to work in the opposite direction. Let X1 , . . . , Xn be
independent Normally distributed random variables with means µ1 , . . . , µn
and SD’s σ1 , . . . , σn .
(a) Write down the density of each Xi .
(b) Write down the joint density of X1 , . . . , Xn .
(c) Show that the joint density can be written in the form of Equation 5.6.
(d) Derive the mean vector and covariance matrix of X1 , . . . , Xn .
32. Prove Corollary 5.25.
33. Show, for every x ∈ R,
x2
1
lim ptp (x) = √ e− 2
p→∞
2π
where ptp (x) is the t density with p degrees of freedom, evaluated at x. Hint:
use Sterling’s formula. (This problem is Exercise 5.18(c) in Statistical Inference, 2nd ed. by Casella and Berger.)
C HAPTER 6
M ORE M ODELS
6.1
Hierarchical Models
It is often useful to think of populations as having subpopulations, and those as
having subsubpopulations, and so on. One example comes from [cite Worsley et
al] who describe fMRI (functional magnetic resonance imaging) experiments. A
subject is placed in an MRI machine and subjected to several stimuli while the
machine measures the amount of oxygen flowing to various parts of the brain.
Different stimuli affect different parts of the brain, allowing scientists to build up a
picture of how the brain works. Let the generic parameter θ be the change in blood
flow to a particular region of the brain under a particular stimulus. θ is called
an effect. As citation explain, θ may vary from subject to subject, from session
to session even for the same patient, and from run to run even within the same
session. To describe the situation fully we need three subscripts, so let θijk be the
effect in subject i, session j, run k. For a single subject i and session j there will be
an overall average effect; call it µij . The set {θijk }k will fall around µij with a bit of
variation for each run k. Assuming Normal distributions, we would write
{θijk }k | µij , σk ∼ i.i.d. N(µij , σk )
Likewise, for a single subject i there will be an overall average effect; call it
µi . The set {µij }j will fall around µi with a bit of variation for each session j.
Further, each µi is associated with a different subject so they are like draws from
a population with a mean and standard deviation, say µ and σi . Thus the whole
342
6.2. TIME SERIES AND MARKOV CHAINS
343
model can be written
{θijk }k | µij , σk ∼ i.i.d. N(µij , σk )
{µij }j | µi , σj ∼ i.i.d. N(µi , σj )
{µi }i | µ, σi ∼ i.i.d. N(µ, σi )
Figure 6.1 is a graphical representation of this model.
pretty picture here
Figure 6.1: Graphical representation of hierarchical model for fMRI
More examples: metaanalysis, Jackie Mohan’s germination records, Chantal’s
arabadopsis, CO2 uptake from R and Pinheiro and Bates, FACE growth rates by
tree|ring|treatment
Is a sample from one population or several? Mixtures of Normals. Extra variation in Binomials, Poisson, etc. Hierarchical and random effects models. Discrete
populations: medical trials, different species, locations, subjects, treatments.
6.2
Time Series and Markov Chains
Figure 6.2 shows some data sets that come with R. The following descriptions are
taken from the R help pages.
Beaver The data are a small part of a study of the long-term temperature dynamics
of beaver Castor canadensis in north-central Wisconsin. Body temperature
was measured by telemetry every 10 minutes for four females, but data from
one period of less than a day is shown here.
Mauna Loa Monthly atmospheric concentrations of CO2 are expressed in parts per
million (ppm) and reported in the preliminary 1997 SIO manometric mole
fraction scale.
DAX The data are the daily closing prices of Germany’s DAX stock index. The data
are sampled in business time; i.e., weekends and holidays are omitted.
UK Lung Disease The data are monthly deaths from bronchitis, emphysema and
asthma in the UK, 1974 – 1979.
6.2. TIME SERIES AND MARKOV CHAINS
344
Canadian Lynx The data are annual numbers of lynx trappings for 1821 – 1934
in Canada.
Presidents The data are (approximately) quarterly approval rating for the President of the United states from the first quarter of 1945 to the last quarter of
1974.
UK drivers The data are monthly totals of car drivers in Great Britain killed or
seriously injured Jan 1969 to Dec 1984. Compulsory wearing of seat belts
was introduced on 31 Jan 1983.
Sun Spots The data are monthly numbers of sunspots. They come from the World
Data Center-C1 For Sunspot Index Royal Observatory of Belgium, Av. Circulaire, 3, B-1180 BRUSSELS http://www.oma.be/KSB-ORB/SIDC/sidc_txt.
html.
What these data sets have in common is that they were all collected sequentially in
time. Such data are known as time series data. Because each data point is related to
the ones before and the ones after, they usually cannot be treated as independent
random variables. Methods for analyzing data of this type are called time series
methods. More formally, a time series is a sequence Y1 , . . . , YT of random variables
indexed by time. The generic element of the series is usually denoted Yt .
Figure 6.2 was produced by the following snippet.
par ( mfrow=c(4,2) )
plot.ts ( beaver1$temp, main="Beaver", xlab="Time",
ylab="Temperature" )
plot.ts ( co2, main="Mauna Loa", ylab="CO2 (ppm)" )
plot.ts ( EuStockMarkets[,1], main="DAX",
ylab="Closing Price" )
plot.ts ( ldeaths, main="UK Lung Disease",
ylab="monthly deaths" )
plot.ts ( lynx, main="Canadian Lynx", ylab="trappings" )
plot.ts ( presidents, main="Presidents", ylab="approval" )
plot.ts ( Seatbelts[,"DriversKilled"], main="UK drivers",
ylab="deaths" )
plot.ts ( sunspot.month, main="Sun Spots",
ylab="number of sunspots" )
6.2. TIME SERIES AND MARKOV CHAINS
345
20 40 60 80
1960 1970 1980 1990
DAX
UK Lung Disease
1992
1994
1996
1998
1500
Time
monthly deaths
Time
2000
1974
1978
Time
Canadian Lynx
Presidents
approval
7000
Time
1820
1860
1900
1945
1975
Time
1955
1965
1975
1980
1985
250
Sun Spots
0
60
200
UK drivers
1970
1980
Time
number of sunspots
Time
deaths
1976
30
0
320
36.4
CO2 (ppm)
Mauna Loa
0
trappings
Closing Price
Temperature
Beaver
1750
1850
1950
Time
Figure 6.2: Beaver: Body temperature of a beaver, recorded every 10 minutes;
Mauna Loa: Atmospheric concentration of CO2 ; DAX: Daily closing prices of the
DAX stock exchange in Germany; UK Lung Disease: monthly deaths from bronchitis, emphysema and asthma; Canadian Lynx: annual number of trappings; Presidents: quarterly approval ratings; UK drivers: deaths of car drivers; Sun Spots:
monthly sunspot numbers.
6.2. TIME SERIES AND MARKOV CHAINS
346
• plot.ts is the command for plotting time series.
The data sets in Figure 6.2 exhibit a feature common to many time series: if one
data point is large, the next tends to be large, and if one data point is small, the
next tends to be small; i.e., Yt and Yt+1 are dependent. The dependence can be seen
in Figure 6.3 which plots Yt+1 vs. Yt , for the Beaver and President datasets. The
upward trend in each panel shows the dependence. Time series analysts typically
use the term autocorrelation — the prefix auto refers to the fact that the time series
is correlated with itself — even though they mean dependence. R has the built-in
function acf for computing autocorrelations. The following snippet shows how it
works.
> acf ( beaver1$temp, plot=F, lag.max=5 )
Autocorrelations of series ’beaver1$temp’, by lag
0
1
2
3
4
5
1.000 0.826 0.686 0.580 0.458 0.342
The six numbers in the bottom line are Cor(Yt , Yt ), Cor(Yt , Yt+1 ), . . . , Cor(Yt , Yt+5 )
and are referred to as autocorrelations of lag 0, lag 1, . . . , lag 5. Those autocorrelations can, as usual, be visualized with plots as in Figure 6.4.
Figure 6.3 was produced by the following snippet.
dim ( beaver1 )
plot ( beaver1$temp[-114], beaver1$temp[-1], main="Beaver",
xlab=expression(y[t]), ylab=expression(y[t+1]) )
length ( presidents )
plot ( presidents[-120], presidents[-1], main="Presidents",
xlab=expression(y[t]), ylab=expression(y[t+1]) )
Figure 6.4 was produced by the following snippet.
par ( mfrow=c(3,2) )
temp <- beaver1$temp
6.2. TIME SERIES AND MARKOV CHAINS
347
36.4 37.0
yt
30 50 70
Presidents
yt+1
37.0
36.4
yt+1
Beaver
30
60
yt
Figure 6.3: Yt+1 plotted against Yt for the Beaver and Presidents data sets
n <- length(temp)
for ( k in 0:5 ) {
x <- temp[1:(n-k)]
y <- temp[(1+k):n]
plot ( x, y, xlab=expression(Y[t]),
ylab=expression(Y[t+k]), main=paste("lag =", k) )
}
Because time series data cannot usually be treated as independent, we need
special methods to deal with them. It is beyond the scope of this book to present
the major theoretical developments of time series methods. As Figure 6.2 shows,
there can be a wide variety of structure in time series data. In particular, the
Beaver, and Presidents data sets have no structure readily apparent to the eye;
DAX has seemingly minor fluctuations imposed on a general increasing trend; UK
Lung Disease and UK drivers have an annual cycle; Mauna Loa has an annual
cycle imposed and a general increasing trend; and Canadian Lynx and Sun Spots
are cyclic, but for no obvious reason and with no obvious length of the cycle. In
the remainder of this section we will show, by analyzing some of the data sets in
6.2. TIME SERIES AND MARKOV CHAINS
348
lag = 1
37.2
36.4
36.8
37.2
36.4
37.2
Yt
lag = 2
lag = 3
37.2
36.4
36.8
Yt+k
36.8
36.4
36.8
37.2
36.4
36.8
37.2
Yt
lag = 4
lag = 5
36.6
36.6
Yt+k
37.0
37.4
Yt
37.4
36.4
37.0
Yt+k
36.8
Yt
37.2
36.4
Yt+k
36.8
Yt+k
36.8
36.4
Yt+k
37.2
lag = 0
36.4
36.8
Yt
37.2
36.4
36.8
37.2
Yt
Figure 6.4: Yt+k plotted against Yt for the Beaver data set and lags k = 0, . . . , 5
6.2. TIME SERIES AND MARKOV CHAINS
349
Figure 6.2, some of the possibilities.
Beaver Our goal is to develop a more complete picture of the probabilistic structure of the {Yt }’s. To that end, consider the following question. If we’re trying to
predict Yt+1 , and if we already know Yt , does it help us also to know Yt−1 ? I.e., are
Yt−1 and Yt+1 conditionally independent given Yt ? That question can be answered
visually with a coplot (Figures 2.15 and 2.16). Figure 6.5 shows the coplot for the
Beaver data.
Figure 6.5 was produced by the following snippet.
temp <- beaver1$temp
n
<- length ( temp )
coplot ( temp[3:n] ~ temp[1:(n-2)] | temp[2:(n-1)],
xlab=c (expression(Y[t-1]), expression(Y[t])),
ylab=expression(Y[t+1]) )
The figure is ambiguous. In the first, second, and sixth panels, Yt+1 and Yt−1
seem to be linearly related given Yt , while in the third, fourth, and fifth panels,
Yt+1 and Yt−1 seem to be independent given Yt . We can examine the question
numerically with the partial autocorrelation, the conditional correlation of Yt+1 and
Yt−1 given Yt . The following snippet shows how to compute partial autocorrelations
in R using the function pacf.
> pacf ( temp, lag.max=5, plot=F )
Partial autocorrelations of series ’temp’, by lag
1
0.826
2
0.014
3
4
5
0.031 -0.101 -0.063
The numbers in the bottom row are Cor(Yt , Yt+k | Yt+1 , . . . , Yt+k−1 ). Except for the
first, they’re small. Figure 6.5 and the partial autocorrelations suggest that a model
in which Yt+1 ⊥ Yt−1 | Yt would fit the data well. And the first panel in Figure 6.4
suggests that a model of the form Yt+1 = β0 + β1 Yt + t+1 might fit well. Such a
model is called an autoregression. R has a function ar for fitting them. Here’s how
it works with the Beaver data.
6.2. TIME SERIES AND MARKOV CHAINS
350
Yt
36.4
36.6
36.8
37.0
37.4
36.4 36.8 37.2
36.4
36.8
37.2
Yt+1
36.4
36.8
37.2
36.4 36.8 37.2
37.2
36.4 36.8 37.2
Yt!1
Figure 6.5: coplot of Yt+1 as a function of Yt−1 given Yt for the Beaver data set
6.2. TIME SERIES AND MARKOV CHAINS
351
> fit <- ar ( beaver1$temp, order.max=1 )
> fit # see what we’ve got
Call:
ar(x = beaver1$temp, order.max = 1)
Coefficients:
1
0.8258
Order selected 1
sigma^2 estimated as
0.01201
The 0.8258 means that the fitted model is Yt+1 = β0 + 0.8258Yt + t+1 . The t ’s
have an estimated variance of 0.012. fit$x.mean shows that β̂0 = 36.86. Finally,
qqnorm(fit$resid) (Try it.) shows a√nearly linear plot, except for one point, indicating that Yt+1 ∼ N(36.86 + .8258Yt , .012) is a reasonably good model, except for
one outlier.
Mauna Loa The Mauna Loa data look like an annual cycle superimposed on a
steadily increasing long term trend. Our goal is to estimate both components and
decompose the data as
Yt = long term trend + annual cycle + unexplained variation.
Our strategy, because it seems easiest, is to estimate the long term trend first, then
use deviations from the long term trend to estimate the annual cycle. A sensible
estimate of the long term trend at time t is the average of a year’s CO2 readings,
for a year centered at t. Thus, let
ĝ(t) =
.5yt−6 + yt−5 + · · · + yt+5 + .5yt+6
12
(6.1)
where g(t) represents the long term trend at time t. R has the built-in command
filter to compute ĝ. The result is shown in Figure 6.6(a) which also shows how to
use filter. Deviations from ĝ are co2 - g.hat. See Figure 6.6(b). The deviations
can be grouped by month, then averaged. The average of the January deviations,
for example, is a good estimate of how much the January CO2 deviates from the
long term trend, and likewise for other months. See Figure 6.6(c). Finally, Figure 6.6(d) shows the data, ĝ, and the fitted values ĝ + monthly effects. The fit is
good: the fitted values differ very little from the data.
6.2. TIME SERIES AND MARKOV CHAINS
352
(b)
!2
0
resids
340
!4
320
co2
2
360
4
(a)
1980
1960
1980
Time
Time
(c)
(d)
320
340
co2
0
!3 !2 !1
cycle
1
2
360
3
1960
2 4 6 8
Index
12
1960
1980
Time
Figure 6.6: (a): CO2 and ĝ; (b): residuals; (c): residuals averaged by month; (d):
data, ĝ, and fitted values
6.2. TIME SERIES AND MARKOV CHAINS
353
Figure 6.6 was produced by the following snippet.
filt <- c ( .5, rep(1,11), .5 ) / 12
g.hat <- filter ( co2, filt )
par ( mfrow=c(2,2) )
plot.ts ( co2, main="(a)" )
lines ( g.hat )
resids <- co2 - g.hat
plot.ts ( resids, main="(b)" )
resids <- matrix ( resids, nrow=12 )
cycle <- apply ( resids, 1, mean, na.rm=T )
plot ( cycle, type="b", main="(c)" )
plot.ts ( co2, type="p", pch=".", main="(d)" )
lines ( g.hat )
lines ( g.hat + cycle )
DAX Yt is the closing price of the German stock exchange DAX on day t. Investors
often care about the rate of return Yt∗ = Yt+1 /Yt , so we’ll have to consider whether
to analyze the Yt ’s directly, or convert them to Yt∗ ’s first. Figure 6.7 is for the DAX
prices directly. Panel (a) shows the Yt ’s. It seems to show minor fluctuations around
a steadily increasing trend. Panel (b) shows the time series of Yt − Yt−1 . It seems to
show a series of fluctuations approximately centered around 0, with no apparent
pattern, and with larger fluctuations occuring later in the series. Panel (c) shows
Yt versus Yt−1 . It shows a strong linear relationship between Yt and Yt−1 . Two
lines are drawn on the plot: the lines Yt = β0 + β1 Yt−1 for (β0 , β1 ) = (0, 1) and
for (β0 , β1 ) set equal to the ordinary regression coefficients found by lm. The two
lines are indistinguishable, suggesting that Yt ≈ Yt−1 is a good model for the data.
Panel (d) is a Q-Q plot of Yt − Yt−1 . It is not approximately linear, suggesting that
Yt ∼ N(Yt−1 , σ) is not a good model for the data.
Figure 6.7 was produced by the following snippet.
par ( mfrow=c(2,2) )
plot.ts ( DAX, main="(a)" )
plot.ts ( diff(DAX), ylab = expression ( DAX[t] - DAX[t-1] ),
main="(b)" )
6.2. TIME SERIES AND MARKOV CHAINS
354
1995
1992
1995
(c)
(d)
4000
DAXt!1
6000
1998
!200
0
Time
Sample Quantiles
Time
5000
2000
0
1998
2000
DAXt
1992
!200
5000
DAXt ! DAXt!1
(b)
2000
DAX
(a)
!3
!1
1
3
Theoretical Quantiles
Figure 6.7: DAX closing prices. (a): the time series of Yt ’s; (b): Yt − Yt−1 ; (c): Yt
versus Yt−1 ; (d): QQ plot of Yt − Yt−1 .
6.2. TIME SERIES AND MARKOV CHAINS
355
plot ( DAX[-n], DAX[-1], xlab = expression ( DAX[t-1] ),
ylab = expression ( DAX[t] ), main="(c)" )
abline ( 0, 1 )
abline ( lm ( DAX[-1] ~ DAX[-n] )$coef, lty=2 )
qqnorm ( diff(DAX), main="(d)" )
• The R command diff is for taking differences, typically of time series.
diff(y) yields y[2]-y[1], y[3]-y[2], ... which could also be accomplished easily enough without using diff: y[-1] - y[-n]. But additional
arguments, as in diff ( y, lag, differences ) make it much more useful. For example, diff(y,lag=2) yields y[3]-y[1], y[4]-y[2], ... while
diff ( y, differences=2 ) is the same as diff ( diff(y) ). The latter is
a construct very useful in time series analysis.
Figure 6.8 is for the Yt∗ ’s. Panel (a) shows the time series. It shows a seemingly
patternless set of data centered around 1. Panel (b) shows the time series of Yt∗ −
∗
, a seemingly patternless set of data centered at 0. Panel (c) shows Yt∗ versus
Yt−1
∗
∗
Yt−1
. It shows no apparent relationship between Yt∗ and Yt−1
, suggesting that Yt∗ ⊥
∗
Yt−1 is a good model for the data. Panel (d) is a Q-Q plot of Yt∗ . It is approximately
linear, suggesting that Yt∗ ∼ N(µ, σ) is a good model for the data, with a few
outliers on both the high and low ends. The mean and SD of the Y ∗ ’s are about
1.000705 and 0.01028; so Y ∗ ∼ N(1.0007, 0.01) might be a good model.
Figure 6.8 was produced by the following snippet.
par ( mfrow=c(2,2) )
plot.ts ( rate, main="(a)" )
plot.ts ( diff(rate), ylab = expression ( rate[t] - rate[t-1] ),
main="(b)" )
plot ( rate[-n2], rate[-1], xlab = expression ( rate[t-1] ),
ylab = expression ( rate[t] ), main="(c)" )
qqnorm ( rate, main="(d)" )
We now have two possible models for the DAX data: Yt ≈ Yt−1 with a still
to be determined distribution and Y ∗ ∼ N(1.0007, 0.01) with the Yt∗ ’s mutually
independent. Both seem plausible on statistical grounds. (But see Exercise 5 for
further development.) It is not necessary to choose one or the other. Having
6.2. TIME SERIES AND MARKOV CHAINS
356
500
0
500
1500
(c)
(d)
0.98
ratet!1
1.04
0.92
1.00
Time
Sample Quantiles
Time
1.00
0.92
0.05
1500
0.92
ratet
0
!0.05
1.00
ratet ! ratet!1
(b)
0.92
rate
(a)
!3
!1
1
3
Theoretical Quantiles
∗
Figure 6.8: DAX returns. (a): the time series of Yt∗ ’s; (b): Yt∗ − Yt−1
; (c): Yt∗ versus
∗
Yt−1
; (d): QQ plot of Yt∗ .
6.3. CONTINGENCY TABLES
357
several ways of describing a data set is useful. Each model gives us another way to
view the data. Economists and investors might prefer one or the other at different
times or for different purposes. There might even be other useful models that we
haven’t yet considered. Those would be beyond the scope of this book, but could
be covered in texts on time series, financial mathematics, econometrics, or similar
topics.
population matrix models
Example 6.1 (FACE)
Richter’s throughfall data
Example 6.2 (hydrology)
Jagdish’s data. Is this example too complicated?
6.3
Contingency Tables
loglinear models? Simpson’s paradox? Census tables as examples?
6.4
Survival analysis
6.5
The Poisson process
Example 6.3
Earthquakes
Example 6.4
Neurons firing
6.6
Change point models
Example 6.5
Everglades
6.7. SPATIAL MODELS
358
6.7
Spatial models
6.8
Point Process Models
6.9
Evaluating and enhancing models
residuals, RSS, pred. vs. obs., QQ plots, chi-square, AIC, BIC, DIC, SE’s of coefficients, testing nested models, others?
6.10
Exercises
1. (a) Make plots analagous to Figures 6.3 and 6.4, compute autocorrelations,
and interpret for the other datasets in Figure 6.2.
(b) Make plots analagous to Figure 6.5, compute partial autocorrelations,
and interpret for the other data sets in Figure 6.2.
2. Create and fit a good model for body temperatures of the second beaver. Use
the dataset beaver2.
3. (a) Why does Equation 6.1 average over a year? Why isn’t it, for example,
ĝ(t) =
.5yt−k + yt−k+1 + · · · + yt+k−1 + .5yt+k
2k
for some k 6= 6?
(b) Examine ĝ in Equation 6.1. Use R if necessary. Why are some of the
entries NA?
4. The R code for Figure 6.6 contains the lines
resids <- matrix ( resids, nrow=12 )
cycle <- apply ( resids, 1, mean, na.rm=T )
Would the following lines work instead?
resids <- matrix ( resids, ncol=12 )
cycle <- apply ( resids, 2, mean, na.rm=T )
6.10. EXERCISES
359
Why or why not?
5. Figure 6.7 and the accompanying text suggest that Yt ≈ Yt−1 is a good model
for the DAX data. But that doesn’t square with the observation that the Yt ’s
have a generally increasing trend.
(a) Find a quantitative way to show the trend.
(b) Say why the DAX analysis missed the trend.
(c) Improve the analysis so it’s consistent with the trend.
6. Figures 6.7 and 6.8 and the accompanying text analyze the DAX time series
as though it has the same structure throughout the entire time. Does that
make sense? Think of and implement some way of investigating whether the
structure of the series changes from early to late.
7. Choose one or more of the other EU Stock Markets that come with the DAX
data. Investigate whether it has the same structure as the DAX.
8. (a) Make a plausible analysis of the UK Lung Disease data.
(b) R has the three data sets ldeaths, fdeaths, and mdeaths which are the
total deaths, the deaths of females, and the deaths of males. Do the
deaths of females and males follow similar distributional patterns? Justify your answer.
9. Make a plausible analysis of the Presidents approval ratings.
10. (a) Make a plausible analysis of the UK drivers deaths.
(b) According to R, “Compulsory wearing of seat belts was introduced on 31
Jan 1983.” Did that effect the number of deaths? Justify your answer.
(c) Is the number of deaths related to the number of kilometers driven?
(Use the variable kms in the Seatbelts data set.) Justify your answer.
C HAPTER 7
M ATHEMATICAL S TATISTICS
7.1
7.1.1
Properties of Statistics
Sufficiency
Consider the following two facts.
1. Let Y1 , . .P
. , Yn ∼ i.i.d. Poi(λ). Chapter 2, Exercise 7 showed that `(λ) depends
only on
Yi and not on the specific values of the individual Yi ’s.
2. Let Y1 , . . . , Yn ∼
P i.i.d. Exp(λ). Chapter 2, Exercise 20 showed that `(λ) depends only on
Yi and not on the specific values of the individual Yi ’s.
Further, since `(λ) quantifies how strongly the data support each value of λ, other
aspects of y are irrelevant. For inference about λ it suffices to P
know `(λ), and
therefore, for Poisson and Exponential data, P
it suffices to know
Yi . We don’t
need to know the individual Yi ’s. We say that
Yi is a sufficient statistic for λ.
Section 7.1.1 examines the general concept of sufficiency. We work in the context of a parametric family. The idea of sufficiency is formalized in Definition 7.1.
Definition 7.1. Let {p(· | θ)} be a family of probability densities indexed by a parameter θ. Let y = (y1 , . . . , yn ) be a sample from p(· | θ) for some unknown θ. Let
T (y) be a statistic such that the joint distribution factors as
Y
p(yi | θ) = g(T (y), θ)h(y).
for some functions g and h. Then T is called a sufficient statistic for θ.
360
7.1. PROPERTIES OF STATISTICS
361
The idea is that once theQdata have been observed, h(y) is a constant that does
not depend of θ, so `(θ) ∝ p(yi | θ) = g(T, θ)h(y) ∝ g(T, θ). Therefore, in order
to know the likelihood function and make inference about θ, we need only know
T (y), not anything
else about y. For our Poisson and Exponential examples we can
P
take T (y) = yi .
For a more detailed look at sufficiency, think of generating three Bern(θ) trials
y ≡ (y1 , y2 , y3 ). y can be generated, obviously, by generating y1 , y2 , y3 sequentially.
The possible outcomes and their probabilities are
(0, 0, 0)
(1 − θ)3
(1, 0, 0)
(0, 1, 0) θ(1 − θ)2
(0, 0, 1)
(1, 1, 0)
(1, 0, 1) θ2 (1 − θ)
(0, 1, 1)
(1, 1, 1)
θ3
But y can also be generated by a two-step procedure:
P
1. Generate yi = 0, 1, 2, 3 with probabilities (1 − θ)3 , 3θ(1 − θ)2 , 3θ2 (1 − θ), θ3 ,
respectively.
P
2. (a) If yi = 0, generate (0, 0, 0)
P
(b) If
yi = 1, generate (1, 0, 0), (0, 1, 0), or (0, 0, 1) each with probability
1/3.
P
(c) If
yi = 2, generate (1, 1, 0), (1, 0, 1), or (0, 1, 1) each with probability
1/3.
P
(d) If yi = 3, generate (1, 1, 1)
It is easy to check that the two-step procedure generates each of the 8 possible
outcomes with the same probabilities as the obvious sequential procedure. For
generating y the two procedures are equivalent. But in the two-step procedure,
only the first step depends on θ. So if we want to use the data to learn about θ, we
need only know theP
outcome of the first step.
P The second step is irrelevant. I.e.,
we need only know
yi . In other words,
yi is sufficient.
7.1. PROPERTIES OF STATISTICS
362
For an example of another type, let y1 , . . . , yn ∼ i.i.d. U(0, θ). What is a sufficient
statistic for θ?
(
1
if yi < θ for i = 1, . . . , n
n
p(y | θ) = θ
0 otherwise
1
= n 1(0,θ) (y(n) )
θ
shows that y(n) , the maximum of the yi ’s, is a one dimensional sufficient statistic
for θ.
Example 7.1
In World War II, when German tanks came from the factory they had serial numbers
labelled consecutively from 1. I.e., the numbers were 1, 2, . . . . The Allies wanted to
estimate T , the total number of German tanks and had, as data, the serial numbers
of captured tanks. See Exercise 22 in Chapter 5. Assume that tanks were captured
independently of each other and that all tanks were equally likely to be captured. Let
x1 , . . . , xn be the serial numbers of the captured tanks. Then x(n) is a sufficient statistic.
Inference about the total number of German tanks should be based on x(n) and not on
any other aspect of the data.
If y is a random variable whose values are in a space Y, then y is a random
variable whose values are in Y n . For any statistic T we can divide Y n into subsets
indexed by T . I.e., for each value t, we define the subset
Ytn = {y ∈ Y n : T (y) = t}
Then T is a sufficient statistic if and only if
p(y | y ∈ Ytn )
does not depend on θ.
Sometimes sufficient statistics are higher dimensional. For example, let y1 , . . . , yn ∼
i.i.d. Gam(α, β). Then
n Y Y
Y
P
α−1
1
1
α−1 −yi /β
− yi /β
y
e
=
y
e
p(yi | α, β) =
i
i
Γ(α)β α
Γ(α)β α
Q P
so T (y) = ( yi , yi ) is a two dimensional sufficient statistic.
Sufficient statistics are not unique. If T = T (y) is a sufficient statistic, and if f
is a 1-1 function, then f (T ) is also sufficient. So in the Poisson, Exponential, and
7.1. PROPERTIES OF STATISTICS
363
P
P
Bernoulli examples where
yi was sufficient, ȳ =
yi /n is also sufficient. But
the lack of uniqueness is even more severe. The whole data set T (y) = (y) is an
n-dimensional sufficient statistic because
Y
p(yi | θ) = g(T (y), θ)h(y)
where g(T (y), θ) = p(y | θ) and h(y) = 1. The order statistic T (y) = (y(1) , . . . , y(n) )
is another n-dimensional sufficient statistic. Also, if T is any sufficient one dimensional statistic then T2 = (y1 , T ) is a two dimensional sufficient statistic. But it is intuitively clear that these sufficient statistics are higher-dimensional than necessary.
They can be reduced to lower dimensional statistics while retaining sufficiency, that
is, without losing information.
The key idea in the preceding paragraph is that the high dimensional sufficient
statistics can be transformed into the low dimensional ones, but not vice versa.
E.g., ȳ is a function of (y(1) , . . . , y(n) ) but (y(1) , . . . , y(n) ) is not a function of ȳ. Definition 7.2 is for statistics that have been reduced as much as possible without losing
sufficiency.
Definition 7.2. A sufficient statistic T (y) is called minimal sufficient if, for every
other sufficient statistic T2 , T (y) is a function of T2 (y).
This book does not delve into methods for finding minimal sufficient statistics.
In most cases the user can recognize whether a statistic is minimal sufficient.
Does the theory of sufficiency imply that statisticians need look only at sufficient
statistics and not at other aspects of the data? Not quite. Let y1 , . . . , yn be binary
random variables and suppose we adopt
P the model y1 , . . . , yn ∼ i.i.d. Bern(θ). Then
for estimating θ we need look only at
yi . But suppose (y1 , . . . , yn ) turn out to be
· · · 1},
0| 0 {z
· · · 0} 1| 1 {z
many 0’s
many 1’s
i.e., many 0’s followed by many 1’s. Such a dataset would cast doubt on the assumption that the yi ’s are independent. Judging from this dataset, it looks much
more likely that the yi ’s come in streaks. So statisticians should look at all the data,
not just sufficient statistics, because looking at all the data can help us create and
critique models. But once a model has been adopted, then inference should be
based on sufficient statistics.
7.1.2
Consistency, Bias, and Mean-squared Error
Consistency Heuristically speaking, as we collect ever more data we should be
able to learn the truth ever more accurately. This heuristic is captured formally,
7.1. PROPERTIES OF STATISTICS
364
at least for parameter estimation, by the notion of consistency. To say whether an
estimator is consistent we have to define it for every sample size. To that end, let
Y1 , Y2 , · · · ∼ i.i.d. f for some unknown density f having finite mean µ and SD σ.
For each n ∈ N let Tn : Rn → R. I.e. Tn is a real-valued function
(y1 , . . . , yn ). For
Pof
n
−1
example, if we’re trying to estimate µ we might take Tn = n
1 yi .
Definition 7.3. The sequence of estimators T1 , T2 , . . . is said to be consistent for the
parameter θ if for every θ and for every > 0.
lim P[|Tn − θ| < ] = 1.
n→∞
For example, the LawP
of Large Numbers, Theorem 1.12, says the sequence
of
P
n
−1
−1
sample means {Tn = n
1 yi } is consistent for µ. Similarly, let Sn = n
i (yi −
Tn )2 be the sample variance. Then {Sn } is consistent for σ 2 . More generally, m.l.e.’s
are consistent.
Theorem 7.1. Let Y1 , Y2 , · · · ∼ i.i.d. pY (y | θ) and let θ̂n be the m.l.e. from the sample
(y1 , . . . , yn ). Further, let g be a continuous function of θ. Then, subject to regularity
conditions, {g(θ̂n )} is a consistent sequence of estimators for g(θ).
Proof. The proof requires regularity conditions relating to differentiability and the
interchange of integral and derivative. It is beyond the scope of this book.
Consistency is a good property; one should be wary of an inconsistent estimator. On the other hand, consistency alone does not guarantee that a sequence of estimators is optimal, or even sensible. For example, let Rn (y1 , . . . , yn ) =
(bn/2c)−1 (y1 +· · ·+ybn/2c ), the mean of the first half of the observations. (bwc is the
floor of w, the largest integer not greater than w.) The sequence {Rn } is consistent
for µ but is not as good as the sequence of sample means.
Bias It seems natural to want the sampling distribution of an estimator to be
centered around the parameter being estimated. This desideratum is captured
formally, at least for centering in the sense of expectation, by the notion of bias.
Definition 7.4. Let θ̂ = θ̂(y1 , . . . , yn ) be an estimator of a parameter θ. The quantity
E[θ̂] − θ is called the bias of θ̂. An estimator whose bias is 0 is called unbiased.
Here are some examples.
An unbiased estimator Let y1 , . . . , yn ∼ i.i.d. N(µ, σ) and consider µ̂ = ȳ as an
estimate of µ. Because E[ȳ] = µ, ȳ is an unbiased estimate of µ.
7.2. TRANSFORMATIONS OF PARAMETERS
365
A biased estimator Let y1 , . . . , yn ∼ i.i.d. N(µ, σ) and consider
X
(yi − ȳ)2
σ̂ 2 = n−1
as an estimate of σ 2 .
X
X
(yi − ȳ)2 ] = n−1 E[ (yi − µ + µ − ȳ)2 ]
E[n−1
n X
X
= n−1 E[ (yi − µ)2 ] + 2E[ (yi − µ)(µ − ȳ)]
o
X
+ E[ (µ − ȳ)2 ]
= n−1 nσ 2 − 2σ 2 + σ 2
= σ 2 − n−1 σ 2
n−1 2
=
σ
n
2
Therefore σ̂ 2 is a biased estimator of σ 2 . It’s bias is −σ
/n. Some statisticians
P
2
−1
prefer to use the unbiased estimator σ̃ = (n − 1)
(yi − ȳ)2 .
A biased estimator Let x1 , . . . , xn ∼ i.i.d. U(0, θ) and consider θ̂ = x(n) as an estimate of θ. (θ̂ is the m.l.e.; see Section 5.4.) But x(n) < θ; therefore E[x(n) ] < θ;
therefore x(n) is a biased estimator of θ.
Mean Squared Error
7.1.3
Efficiency
7.1.4
Asymptotic Normality
7.1.5
Robustness
7.2
Transformations of Parameters
Equivalent parameterizations, especially ANOVA’s, etc. Invariance of MLEs.
7.3
Information
7.4
More Hypothesis Testing
[a more formal presentation here?]
7.5. EXPONENTIAL FAMILIES
7.4.1
p values
7.4.2
The Likelihood Ratio Test
7.4.3
The Chi Square Test
7.4.4
Power
7.5
Exponential families
7.6
Location and Scale Families
366
Location/scale families
7.7
Functionals
functionals
7.8
Invariance
Invariance
7.9
Asymptotics
In real life, data sets are finite: (y1 , . . . , yn ). Yet we often appeal to the Law of
Large Numbers or the Central Limit Theorem, Theorems 1.12, 1.13, and 1.14,
which concern the limit of a sequence of random variables as n → ∞. The hope is
that when n is large those theorems will tell us something, at least approximately,
about the distribution of the sample mean. But we’re faced with the questions
“How large is large?” and “How close is the approximation?”
To take an example, we might want to apply the Law of Large Numbers or
the Central Limit Theorem to a sequence Y1 , Y2 , . . . of random variables from a
distribution with mean µ and SD σ. Here are a few instances of the first several
elements of such a sequence.
7.9. ASYMPTOTICS
0.70 0.29 0.09 -0.23
-0.23 -0.24 0.29 -0.16
-1.10 -0.91 -0.34 0.22
..
..
..
..
.
.
.
.
367
-0.30 -0.79 -0.72 -0.35 1.79 · · ·
0.37 -0.01 -0.48 -0.59 0.39 · · ·
1.07 -1.51 -0.41 -0.65 0.07 · · ·
..
..
..
..
.. . .
.
.
.
.
.
.
Each sequence occupies one row of the array. The “· · · ” indicates that the sequence
.
continues infinitely. The “..” indicates that there are infinitely many such sequences.
The numbers were generated by
y <- matrix ( NA, 3, 9 )
for ( i in 1:3 ) {
y[i,] <- rnorm(9)
print ( round ( y[i,], 2 ) )
}
• I chose to generate Yi ’s from the N(0, 1) distribution, so I used rnorm, and so,
for this example, µ = 0 and σ = 1. Those are arbitrary choices. I could have
used any values of µ and σ and any distribution for which I know how to
generate random variables on the computer.
• round does rounding. In this case we’re printing each number with two decimal places.
Because there are multiple sequences, each with multiple elements, we need two
subscripts to keep track of things properly. Let Yij be the j’th element of the i’th sequence. For the i’th sequence of random variables, we’re interested in the sequence
of means Ȳi1 , Ȳi2 , . . . where Ȳin = (Yi1 +
√ · · · + Yin )/n. And we’re also interested in
the sequence Zi1 , Zi2 , . . . where Zin = n(Ȳin − µ). For the three instances above,
the Ȳin ’s and Zin ’s can be printed with
for ( i in 1:3 ) {
print ( round ( cumsum(y[i,]) / 1:9, 2) )
print ( round ( cumsum(y[i,]) / (sqrt(1:9)), 2) )
}
• cumsum computes a cumulative sum; so cumsum(y[1,]) yields the vector
y[1,1], y[1,1]+y[1,2], ..., y[1,1]+...+y[1,9]. (Print out
cumsum(y[1,]) if you’re not sure what it is.) Therefore,
cumsum(y[i,])/1:9 is the sequence of Ȳin ’s.
7.9. ASYMPTOTICS
368
• sqrt computes the square root. So the second print statement prints the
sequence of Zin ’s.
The results for the Ȳin ’s are
0.70 0.49
-0.23 -0.23
-1.10 -1.01
..
..
.
.
0.36
-0.06
-0.78
..
.
0.21
-0.08
-0.53
..
.
0.11 -0.04 -0.14 -0.16 0.05 · · ·
0.01 0.00 -0.07 -0.13 -0.07 · · ·
-0.21 -0.43 -0.43 -0.45 -0.40 · · ·
..
..
..
..
.. . .
.
.
.
.
.
.
0.96
-0.23
-1.94
..
.
0.84
-0.31
-1.83
..
.
0.71
-0.15
-1.35
..
.
and for the Zin ’s are
0.70 0.91
-0.23 -0.40
-1.10 -1.74
..
..
.
.
0.39
-0.15
-1.97
..
.
0.11 -0.01
-0.33 -0.54
-2.12 -2.35
..
..
.
.
0.59 · · ·
-0.41 · · ·
-2.33 · · ·
.. . .
.
.
We’re interested in the following questions.
1. Will every sequence of Ȳi ’s or Zi ’s converge? This is a question about the limit
along each row of the array.
2. If they converge, do they all have the same limit?
3. If not every sequence converges, what fraction of them converge; or what is
the probability that a randomly chosen sequence of Ȳi ’s or Zi ’s converges?
4. For a fixed n, what is the distribution of Ȳn or Zn . This is a question about
the distribution along columns of the array.
5. Does the distribution of Ȳn or Zn depend on n?
6. Is there a limiting distribution as n → ∞?
Some simple examples and the Strong Law of Large Numbers, Theorem 1.13,
answer questions 1, 2, and 3 for the sequences of Ȳi ’s. The Central Limit Theorem,
Theorem 1.14, answers question 6 for the sequences of Zi ’s.
1. Will every sequence of Ȳi ’s converge? No. Suppose the sequence of Yi ’s is
1, 2, 3, . . . . Then {Ȳi } increases without limit and does not converge.
2. If they converge, do they have the same limit? No. Here are two sequences
of Yi ’s.
7.9. ASYMPTOTICS
369
1 1 1 ···
-1 -1 -1 · · ·
The corresponding sequences {Ȳi } converge to different limits.
3. What is the probability of convergence? The probability of convergence is 1.
That’s the Strong Law of Large Numbers. In particular, the probability of
randomly getting a sequence like 1, 2, 3, . . . that doesn’t converge is 0. But
the Strong Law of Large Numbers says even more. It says
P[ lim Ȳn = µ] = 1.
n→∞
So the probability of getting sequences like 1, 1, 1, . . . or −1, −1, −1, . . . that
converges to something other than µ is 0.
4. What is the distribution of Zn ? We cannot say in general. It depends on the
distribution of the individual Yi ’s.
5. Does the distribution of Zn depend on n? Yes, except in the special case
where Yi ∼ N(0, 1) for all i.
6. Is there a limiting distribution? Yes. That’s the Central Limit Theorem. Regardless of the distribution of the Yij ’s, as long as Var(Yij ) < ∞, the limit, as
n → ∞, of the distribution of Zn is N(0, 1).
The Law of Large Numbers and the Central Limit Theorem are theorems about
the limit as n → ∞. When we use those theorems in practice we hope that our
sample size n is large enough that Ȳin ≈ µ and Zin ∼ N(0, 1), approximately. But
how large should n be before relying on these theorems, and how good is the
approximation? The answer is, “It depends on the distribution of the Yij ’s”. That’s
what we look at next.
To illustrate, we generate sequences of Yij ’s from two distributions, compute
Ȳin ’s and Zin ’s for several values of n, and compare. One distribution is U(0, 1); the
other is a recentered and rescaled version of Be(.39, .01).
The Be(.39, .01) density, shown in Figure 7.1, was chosen for its asymmetry. It
has a mean of .39/.40 = .975 and a variance of (.39)(.01)/((.40)2 (1.40)) ≈ .017. It
was recentered and rescaled to have a mean of .5 and variance of 1/12, the same
as the U(0, 1) distribution.
Densities of the Ȳin ’s are in Figure 7.2. As the sample size increases from n = 10
to n = 270, the Ȳin ’s from both distributions get closer to their expected value of
7.9. ASYMPTOTICS
370
0
2
4
6
8
0.5. That’s the Law of Large Numbers at work. The amount by which they’re off
their mean goes from about ±.2 to about ±.04. That’s Corollary 1.10 at work. And
finally, as n → ∞, the densities get more Normal. That’s the Central Limit Theorem
at work.
Note that the density of the Ȳin ’s derived from the U(0, 1) distribution is close
to Normal even for the smallest sample size, while the density of the Ȳin ’s derived
from the Be(.39, .01) distribution is way off. That’s because U(0, 1) is symmetric
and unimodal, and therefore close to Normal to begin with, while Be(.39, .01) is far
from symmetric and unimodal, and therefore far from Normal, to begin with. So
Be(.39, .01) needs a larger n to make the Central Limit Theorem work; i.e., to be a
good approximation.
Figure 7.3 is for the Zin ’s. It’s the same as Figure 7.2 except that each density
has been recentered and rescaled to have mean 0 and variance 1. When put on the
same scale we can see that all densities are converging to N(0, 1).
0.0
0.2
0.4
0.6
0.8
1.0
Figure 7.1: The Be(.39, .01) density
Figure 7.1 was produced by
x <- seq ( .01, .99, length=80 )
plot ( x, dbeta(x,.39,.01), type="l", ylab="", xlab="" )
7.10. EXERCISES
371
Figure 7.2 was generated by the following R code.
samp.size <- c ( 10, 30, 90, 270 )
n.reps
<- 500
Y.1 <- matrix ( NA, n.reps, max(samp.size) )
Y.2 <- matrix ( NA, n.reps, max(samp.size) )
for ( i in 1:n.reps ) {
Y.1[i,] <- runif ( max(samp.size), 0, 1 )
Y.2[i,] <- ( rbeta ( max(samp.size), 0.39, .01 ) - .975 ) *
sqrt( .4^2*1.4 / (.39*.01*12 ) ) + .5
}
par ( mfrow=c(2,2) )
for ( n in 1:length(samp.size) ) {
Ybar.1 <- apply ( Y.1[,1:samp.size[n]], 1, mean )
Ybar.2 <- apply ( Y.2[,1:samp.size[n]], 1, mean )
sd <- sqrt ( 1 / ( 12 * samp.size[n] ) )
x <- seq ( .5-3*sd, .5+3*sd, length=60 )
y <- dnorm ( x, .5, sd )
den1 <- density ( Ybar.1 )
den2 <- density ( Ybar.2 )
ymax <- max ( y, den1$y, den2$y )
plot ( x, y, ylim=c(0,ymax), type="l", lty=3, ylab="",
xlab="", main=paste("n =", samp.size[n]) )
lines ( den1, lty=2 )
lines ( den2, lty=4 )
}
• The manipulations in the line Y.2[i,] <- ... are so Y.2 will have mean
1/2 and variance 1/12.
7.10
Exercises
1. Let Y1 , . . . , Yn be a sample from N(µ, σ).
(a) Suppose µ is unknown but σ is known. Find a one dimensional sufficient
7.10. EXERCISES
372
25
20
15
10
5
0
0
5
10
15
20
25
30
n = 30
30
n = 10
0.0
0.4
0.8
0.0
0.8
25
20
15
10
5
0
0
5
10
15
20
25
30
n = 270
30
n = 90
0.4
0.0
0.4
0.8
0.0
0.4
0.8
Figure 7.2: Densities of Ȳin for the U(0, 1) (dashed), modified Be(.39, .01) (dash
and dot), and Normal (dotted) distributions.
7.10. EXERCISES
373
0.8
0.6
0.4
0.2
0.0
0.0
0.2
0.4
0.6
0.8
1.0
n = 30
1.0
n = 10
!3
!1
1
3
!3
1
3
0.8
0.6
0.4
0.2
0.0
0.0
0.2
0.4
0.6
0.8
1.0
n = 270
1.0
n = 90
!1
!3
!1
1
3
!3
!1
1
3
Figure 7.3: Densities of Zin for the U(0, 1) (dashed), modified Be(.39, .01) (dash
and dot), and Normal (dotted) distributions.
7.10. EXERCISES
374
statistic for µ.
(b) Suppose µ is known but σ is unknown. Find a one dimensional sufficient
statistic for σ.
(c) Suppose µ and σ are both unknown. Find a two dimensional sufficient
statistic for (µ, σ).
2. Let Y1 , . . . , Yn be a sample from Be(α, β). Find a two dimensional sufficient
statistic for (α, β).
3. Let Y1 , . . . , Yn ∼ i.i.d. U(−θ, θ). Find a low dimensional sufficient statistic for
θ.
B IBLIOGRAPHY
Consumer Reports, June:366–367, 1986.
D. F. Andrews and A. M. Herzberg. Data. Springer-Verlag, New York, 1985.
H. Bateman. On the probability distribution of α particles. Philosophical Magazine
Series 6, 20:704–705, 1910.
Richard J. Bolton and David J. Hand. Statistical fraud detection: A review. Statistical Science, 17:235–255, 1992.
Paul Brodeur. Annals of radiation, the cancer at Slater school. The New Yorker, Dec.
7, 1992.
Jason C. Buchan, Susan C. Alberts, Joan B. Silk, and Jeanne Altmann. True paternal
care in a multi-male primate society. Nature, 425:179–181, 2003.
George Casella and Roger L. Berger. Statistical Inference. Duxbury, Pacific Grove,
second edition, 2002.
Lorraine Denby and Daryl Pregibon. An example of the use of graphics in regression. The American Statistician, 41:33–38, 1987.
A. J. Dobson. An Introduction to Statistical Modelling. Chapman and Hall, London,
1983.
D. Freedman, R. Pisani, and R. Purves. Statistics. W. W. Norton and Company, New
York, 1998.
Michael Lavine. What is Bayesian statistics and why everything else is wrong. The
Journal of Undergraduate Mathematics and Its Applications, 20:165–174, 1999.
375
BIBLIOGRAPHY
376
Michael Lavine, Brian Beckage, and James S. Clark. Statistical modelling of
seedling mortality. Journal of Agricultural, Biological and Environmental Statistics, 7:21–41, 2002.
R Development Core Team. R: A Language and Environment for Statistical Computing. R Foundation for Statistical Computing, Vienna, Austria, 2006. URL
http://www.R-project.org. ISBN 3-900051-07-0.
E. Rutherford and H. Geiger. The probability variations in the distribution of α
particles. Philosophical Magazine Series 6, 20:698–704, 1910.
Mark J. Schervish. Theory of Statistics. Springer-Verlag, New York, 1995.
T.S. Tsou and R.M. Royall. Robust likelihoods. Journal of the American Statistical
Association, 90:316–320, 1995.
Jessica Utts. Replication and meta-analysis in parapsychology. Statistical Science,
4:363–403, 1991.
Sanford Weisberg. Applied Linear Regression. John Wiley & Sons, New York, second
edition, 1985.
I NDEX
α particle, 296
density estimation, 105
dependence, 54
distribution, 2
Distributions
Bernoulli, 280
Beta, 313
Binomial, 14, 279
Cauchy, 332
Exponential, 20
Gamma, 305
Multinomial, 290
Negative binomial, 284
Normal, 22, 315
Poisson, 17, 292
standard multivariate Normal, 320
standard Normal, 29
Uniform, 303
autocorrelation, 346
autoregression, 349
bandwidth, 106
bias, 364
case, 216
cdf, see cumulative distribution function
Central Limit Theorem, 80
change of variables, 12
characteristic functions, 275
Chebychev’s Inequality, 79
chi-squared distribution, 312
consistency, 364
coplots, 126
correlation, 53
covariance, 51
covariance matrix, 266
covariate, 216
cross tabulation, 116
cumulative distribution function, 271
errors, 219
estimate, 154
expected value, 30
explanatory variable, 216
fitted values, 224, 250
fitting, 225
floor, 364
formula, 225
DASL, see Data and Story Library, see
Data and Story Library, 205
Data and Story Library, 105, 141
density
probability, 264
gamma function, 305
377
INDEX
Gaussian density, 315
generalized moment, 39
genotype, 290
half-life, 309
histogram, 104
independence, 54
joint, 265
mutual, 265
indicator function, 56
indicator variable, 56
Jacobian, 268
Laplace transform, 273
Law of Large Numbers, 79, 80
likelihood function, 133
likelihood set, 156
linear model, 219
linear predictor, 241
location parameter, 318
logistic regression, 240
logit, 241
marginal likelihood, 140
maximum likelihood estimate, 154
mean, 30
median, 95
Mediterranean tongue, 30
mgf, see moment generating function
minimal sufficient, 363
moment, 38
moment generating function, 273
mosaic plot, 117
multinomial coefficient, 291
multivariate
change of variables, 268
order statistic, 96, 363
378
outer product, 324
parameter, 14, 132, 279
parametric family, 14, 132, 279
partial autocorrelation, 349
pdf, see probability density, see probability density
physics, 8
Poisson process, 311, 312
predicted values, 250
probability
continuous, 1, 7
density, 7
discrete, 1, 6
QQ plots, 111
quantile, 95
R commands
!, 59
==, 4
[[]], see subscript
[], see subscript
#, 4
%o%, 324
,̃ 225
abline, 147
acf, 346
apply, 63
ar, 349
array, 67
arrows, 38
as.factor, 246
assignment, 4, 6
+<-+,4
boxplot, 61, 109
c, 9
cbind, 76
contour, 147
INDEX
coplot, 127
cor, 53
cov, 51
cumsum, 367
data.frame, 245
dbinom, 17, 282
density, 12
dexp, 22
diff, 317, 355
dim, 73
dimnames, 303
dmultinom, 292
dnbinom, 288
dnorm, 23
dpois, 20
expression, 135
filter, 351
fitted, 250
for, 5
glm, 244
hist, 12
if, 6
is.na, 147
legend, 22
length, 74
lines, 12
list, 131
lm, 225
log10, 153
lowess, 208
matplot, 22
matrix, 22, 61
mean, 12
median, 95
mosaicplot, 117
names, 73
pacf, 349
pairs, 51
379
par, 10
paste, 22
pbinom, 282
plot, 9, 20
plot.ecdf, 98
plot.ts, 346
pnbinom, 288
print, 5
qbinom, 282
qnbinom, 288
qqnorm, 113
quantile, 96
rbinom, 39, 282
read.table, 73
rep, 5, 6
rmultinom, 292
rnbinom, 288
rnorm, 26
round, 367
sample, 3
scan, 131
segments, 273
seq, 20
sqrt, 368
stripchart, 108
subscript, 73, 74
sum, 4, 5
supsmu, 208
tapply, 76
text, 38
unique, 104
var, 12
while, 59
R data sets
airquality, 202
attenu, 202
beaver1, 344, 346
co2, 64, 344
INDEX
discoveries, 10
EuStockMarkets, 344
faithful, 120, 202
iris, 51
ldeaths, 344
lynx, 344
mtcars, 202, 229, 250
PlantGrowth, 214
presidents, 344, 346
Seatbelts, 344
sunspot.month, 344
Tooth Growth, 100, 184
UCBAdmissions, 115
random vector, 264
regression function, 208
regressor, 216
residual, 208
residual plots, 231
response variable, 216
sampling distribution, 158
scale parameter, 318
scatterplot smoothers, 205
standard deviation, 34
standard error, 163
standard Normal distribution, 318
standard units, 26
StatLib, 73
Strong Law of Large Numbers, 80
sufficient statistic, 360
variance, 34
Weak Law of Large Numbers, 79
380
I NDEX
OF
E XAMPLES
1970 draft lottery, 202
baboons, 185
CEO salary, 139
craps, 2, 3, 15, 49, 57, 59, 155
FACE, 63, 142, 234
hot dogs, 103, 208, 214, 222
Ice Cream Consumption, 218
neurobiology, 128
O-rings, 234
ocean temperatures, 29, 306
quiz scores, 109, 146
Rutherford and Geiger, 291
seedlings, 18, 43, 49, 56, 134, 148,
165, 206, 243
Slater school, 134, 138, 191
381