Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
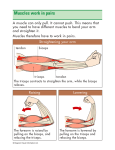
696406A Investigating the Interactions of Muscles and Bones INSTRUCTION MANUAL CARmunA World-Class Support for Science & Math Investigating the Interactions of Muscles and Bones Instruction Manual Overview , , Objectives , , ' , 3 3 Background 3 Materials 8 Assembly Instructions 8 Teacher Tips 8 Sample Data Tables and Graph Answers to Questions 9 10 Photocopy Masters Activity Instructions S-l Data Sheet S-4 Questions S-5 ©2010 Carolina Biological Supply Company Printed in USA Investigating the Interactions of Muscles and Bones Overview The model used in this kit incorporates physiology and physics to demonstrate the functional design of the human arm. Using this kit, students or teacher demonstrators illustrate the action of antagonistic muscles using rubber bands to represent the triceps and biceps. They also investigate the third-class lever design of the human arm. They explore how the location of the biceps insertion (effort force) in relation to the elbow (fulcrum) affects the amount of effort needed to raise a stack of weights (resistance force). Effort force is measured using a spring scale, and the mechanical advantage provided by the arm (lever) at three different insertion points is calculated and compared. The arm model is also used to illustrate the relationship between effort force provided by the biceps muscle and range of motion in the human arm to move the hand. Objectives • Understand the action of antagonistic muscles • Understand the design of a third-class lever and how it relates to the human arm • Understand how the relationship between mechanical advantage and range of motion explains the lever design of the human arm Background Biology of the Human Arm Muscle Types Humans are large and complex organisms that require muscular and skeletal systems for support and locomotion. Muscles enable motion, cause the heart to beat, maintain posture, manage blood pressure, move food through the digestive tract, absorb shock, and help regulate body temperature. There are three types of muscle tissue in the human body: cardiac, smooth, and skeletal. Cardiac muscle is striated (striped) in appearance, due to the alternating light and dark bands within the muscle fibers; it is present only in the walls of the heart. Cardiac muscle is under involuntary control by the autonomic nervous system. Smooth muscle is found in internal organs. It lines the walls of the digestive tract and is found in blood vessels, the urinary bladder, the uterus, and other organs. Like cardiac muscle, smooth muscle is under involuntary control, but it is not striated in appearance. Skeletal muscle is attached to the bones of the skeleton. Contraction of skeletal muscles enables the movement of bones. Skeletal muscle is under voluntary control by the somatic nervous system, meaning that there is conscious control over muscle contraction and relaxation. Skeletal muscle is striated in appearance and is the most abundant tissue in the human body. There are more than 400 skeletal muscles in the body and they make up 40-45% of a person's total body weight. Interaction of Skeletal Muscles and Bones The skeletal system and skeletal muscles together make up the musculoskeletal system. The skeletal system is comprised of bones and joints. Where two bones meet, a joint is formed. Bones are connected at joints by tissues called ligaments. Skeletal muscles are attached by connective tissues called tendons to at least two different Teacher's Manual 3 Investigating the Interactions of Muscles and Bones Kit bones across a joint. Muscles are necessary to move the bones. The attachment point of the muscle nearer the center of the body is called the origin. The origin is on the more stationary or fixed bone. The attachment point of the muscle further from the center of the body and on the more mobile bone is called the insertion. The biceps muscle of the upper arm is attached by two origins (and therefore has two heads) to the scapula bone in the shoulder (shoulder blade). The biceps runs the length of the humerus bone in the upper arm and is attached to the radius bone of the forearm (lower arm) at its insertion (see Fig. 1). The forearm is comprised of two bones, the radius and the ulna. The triceps muscle of the upper arm is attached by three origins (and therefore has three heads), one to the scapula and two to the humerus. The triceps runs the length of the humerus bone on the underside of the upper arm and attaches to the ulna bone of the forearm at its insertion. i Biceps origins Biceps muscle Biceps insertion Figure 1. Origins and Insertions of Biceps and Triceps Muscles When skeletal muscles contract, the (*Third triceps origin not shown.) insertion is pulled toward the stationary origin, causing bones to move at a joint. It is important to note that muscles act by exerting a pulling force, never a pushing force. Contracted muscles are shorter and thicker than when they are relaxed. When the biceps contracts, the arm bends at the elbow joint as the insertion on the forearm is pulled toward the origin on the shoulder blade. The biceps muscle is called a flexor because it flexes, or bends, the elbow joint. The triceps muscle works in opposition to the biceps. When the triceps contracts, the insertion is pulled toward the origin, causing the arm to straighten, or extend, at the elbow. The triceps is therefore an extensor muscle. The biceps and triceps flank the upper arm and work as an antagonistic muscle pair across the elbow joint. That is, when one muscle contracts, the other relaxes. Movement produced by contraction of the biceps muscle and relaxation of the triceps can be reversed by contraction of the triceps muscle and relaxation of the biceps. When the biceps flexes the forearm, it acts as an agonist. The triceps working in opposition to the biceps is an antagonist. Other movable bones of the skeleton are also flanked by antagonistic skeletal muscles, or muscle groups, to control body movements across joints. Physics of the Human Arm The Human Arm is a Lever A simple machine is a device that multiplies or redirects a force to make tasks easier. A lever is a type of simple machine that consists of (1) a rigid bar, (2) a fixed point or fulcrum upon which the bar pivots, (3) an object or weight to be moved, and (4) a force supplied to move the weight. The resistance force is the force exerted by 4 Teacher's Manual Investigating the Interactions of Muscles and Bones Kit the load (object to be moved) while the effort force is the force applied to move the load. There are three types, or classes, of levers; each class is defined by where these forces are applied to the lever in relation to the stationary fulcrum. In first-class levers, the effort and resistance forces are on opposing ends of the lever arm, with the fulcrum between the two forces (see Figure 2a). A common example of a first-class lever is a seesaw. The board of the seesaw is the rigid bar across the pivot point (fulcrum). One person on the seesaw supplies the effort force to move the weight of the other person (the resistance force). In second-class levers, the fulcrum is at one end of the lever arm, the effort force is at the other end of the lever arm, and the resistance force is between the two (see Figure 2b). A common example of a second-class lever is a wheelbarrow. The wheel acts as the fulcrum, and the load in the container supplies the resistance force. The effort force is applied to the handles to lift the load. a. first, class lever b. second, class lever c. third, class lever Figure 2. Types of Levers (R = resistance force, E = effort force, F = fulcrum) In third-class levers, the fulcrum is at one end of the lever arm, the resistance force is at the other end of the arm, and the effort force is between the two (see Figure 2c). Contraction of the biceps to raise the human forearm is an example of a biological third-class lever. The forearm bones comprise the rigid bar of the lever. The elbow joint is the fulcrum, the pull of the biceps insertion on the forearm provides the effort force, and the weight of the forearm and hand (including objects held in the hand) is the resistance to be lifted (see Figure 3). Figure 3. The Human Arm is a Third-Class Lever (R = resistance, E = effort, F = fulcrum) The human arm is most commonly thought of as a third-class lever when it bends at the elbow to raise the forearm. However, straightening the arm at the elbow to lower Teacher's Manual 5 Investigating the Interactions of Muscles and Bones Kit the forearm actually represents a first-class lever. In this case, the effort force is provided by the pull of the triceps insertion on the forearm. The insertion of the triceps is located behind the elbow. Therefore, the fulcrum (elbow) is located between the effort and the resistance. This classifies the lowering of the forearm by the triceps as a first-class lever. The human body utilizes all three types of levers for different adaptive purposes. Mechanical Advantage The three classes of levers differ in how they magnify or redirect the applied effort force. The relative amount of effort force necessary to overcome a counteracting resistance force varies among the classes of levers. The required effort force depends on the distance the effort and resistance forces acting on the lever are from the fulcrum of the lever. The distance of the applied effort to the fulcrum is called the effort distance (or effort arm) and the distance of the counteracting resistance to the fulcrum is called the resistance distance (or resistance arm). The length of these arms helps determine how much effort force is needed to overcome the resistance force. When the effort arm is longer than the resistance arm (as in a second-class lever), a smaller amount of effort force is needed to overcome a larger resistance force. When the resistance distance is longer than the effort distance (as in a third-class lever), the effort force necessary to move the load is greater than the resistance force. The ratio of effort distance (dE) to resistance distance (dR) determines the ideal mechanical advantage (IMA) of the lever (IMA = dE/dR).Ideal mechanical advantage represents the advantage the lever provides in a frictionless environment. Since friction is inevitable in the real world, mechanical advantage is calculated as a ratio of the resistance force (FR) to the effort force (FE) as represented by the equation MA = FR/FE'As a result, mechanical advantage can be either less than or greater than one. If the effort force needed to overcome the resistance (move the load) is greater than the force supplied by the load (resistance force), the mechanical advantage will be less than one. The most effective levers require an input of effort force that is less than the counteracting resistance force to move the load. These levers magnify the effort force and have a mechanical advantage that is greater than one. The mechanical advantage of third-class levers is always less than one. This is because the effort force is between the fulcrum and the resistance, causing the effort distance to always be less than the resistance distance. In the human arm example, the effort arm is the distance from the elbow to the biceps insertion. The resistance arm is the distance from the elbow to the hand (see Figure 4). A greater amount of effort force provided by the biceps than resistance force applied by the load is required to raise the forearm. Range of Motion In terms of mechanical advantage, the third-class lever design of the human arm actually operates at a disadvantage. However, there are adaptive reasons for such a biological lever. The third-class lever design of the human arm gains in speed and displacement of the moving end of the lever arm at the expense of effort force. A lever that multiplies the effort force and increases mechanical advantage sacrifices the distance the resistance can move. 6 Teacher's Manual Investigating the Interactions of Muscles and Bones Kit Although third-class levers always require more effort force than counteracting resistance force, moving the effort closer to the resistance can reduce the required effort. In the human arm, if the biceps insertion were closer to the hand, or if the forearm were shorter, mechanical advantage would improve. Moving the biceps insertion would increase the length of the effort arm. Shortening the forearm would decrease the length of the resistance arm. The closer the effort force is to the resistance force, the less effort needed to counteract it. However, having the biceps insertion closer to the hand, or shortening the forearm would greatly restrict the range of motion in the arm to move the hand, and any objects in it. When the forearm is held perpendicular to the body (with the arm bent) and a weight is placed in the hand, effort must be applied by the biceps to keep the weight perpendicular to the body. However, without adding any effort, the weight can be displaced a great distance. If the biceps insertion were located closer to the hand, or the forearm were shorter, no additional effort would be necessary to keep the weight in the hand perpendicular to the body, but the range of motion in the arm would be limited. In the human body, maximized range of motion of the forearm is more important to function than decreased input of effort force by the biceps muscle. The design of the human arm fits the function of the body by allowing for a wide variety of movements. Figure 4. Resistance and Effort Distances in the Human Arm (R Materials = resistance, E = effort, F = fulcrum, dE = effort distance, dR = resistance distance) The materials in this kit are designed for teacher demonstration or for a small group of students working cooperatively. Included in the kit: arm model (3 parts prior to assembly) package of rubber bands mass hanger 7 10-g weights roll of string spring scale tape measure Teacher's Manual 7 Investigating the Interactions of Muscles and Bones Kit Needed, but not supplied: scissors Assembly Instructions Before beginning the activities, assemble the model according to the following instructions: 1. Place the rectangular base of the model on a flat surface. 2. Insert the length of pipe that has no attachments into the hole in the base. Press the pipe into the hole to create a secure fit. 3. Place the pipe with the attached arm model on top of the pipe secured to the base. Orient the arm model so that the forearm is in line with the base. You will be instructed when to use the supporting materials with the model when performing the included activities. Teacher Tips Sample Data Tables and Graph 8 Teacher's Manual • When directed in the activity instructions, place the rubber bands, mass hanger, and loop of string securely on the pegs, behind the caps. • Usage over time will cause the rubber bands to lose some elasticity. Although this will slightly affect the data gathered in Activity 3, it will not alter the relationship between insertion point and range of motion. • The arm model in this kit is a simplified representation of the human arm. As such, there are deviations and omissions from the actual structure of the human arm. • In Activity 1, rubber bands are used to represent the biceps and triceps muscles. The multiple heads of these muscles are not reflected in the rubber band model. • The arm model focuses only on the biceps and triceps muscles of the arm, but it is important to note that there are additional muscles in the arm that contribute to movement. • The structure of the arm model outlines the shape of the human arm but does not detail the internal bones. In reality, the biceps and triceps muscles are attached directly to bone. Sample Data Table for Activity 2: Mechanical Advantage Biceps Insertion Effort Force (FE) unit = N Resistance Force (FR) unit = N Mechanical Advantage (FR/FE) Effort Distance (dE) unit = cm B 13.5 N 1.71 N 0.13 5.3 cm C 7.8N 1.71 N 0.22 7.5 cm D 5.8N 1.71 N 0.29 10.1 cm Investigating the Interactions of Muscles and Bones Kit Sample Graph for Activity 2: Mechanical Advantage Mechanical Advantage 0.45 Ql Cl I I I I i I I I vs. Effort Distance 0.35 .el c co > "0 <t: co 0.30 () c co .s::: () Ql ~ 0.25 0.20 0.15 0.10 5 4 6 7 9 8 11 10 Effort Distance (cm) ( Sample Data Table for Activity 3: Range of Motion Biceps Starting Distance Ending Distance unit = cm Insertion unit = cm Change in Distance unit = cm B 54.5 cm 16.6 cm 37.9 cm C 63.5 cm 36.2 cm 27.3 cm D 64.7 cm 50.2 cm 14.5 cm Teacher's Manual 9 Investigating Answers to Questions the Interactions of Muscles and Bones Kit 1. The biceps and triceps muscles flank the humerus bone of the upper arm. How, then, are these muscles able to raise and lower the forearm? The biceps and triceps muscles flank the humerus bone of the upper arm but each is connected to a bone of the lower arm at its insertion. The biceps insertion is on the radius (upper bone) of the forearm and the triceps insertion is on the ulna (lower bone) of the forearm. To raise the forearm, the biceps contracts, causing the insertion to pull the forearm upward. To lower the forearm, the triceps contracts, causing the insertion to pull the forearm downward. The triceps and biceps work as an antagonistic muscle pair. When the biceps contracts, the triceps relaxes. 2. What does it mean to have a lever with a mechanical advantage greater than one in terms of resistance force versus effort force? A lever with a mechanical advantage greater than one means that the resistance force acting on the lever can be overcome by an input of effort force that is less than the counteracting resistance force. The lever magnifies the effort force such that less effort force than resistance force is necessary to move the load. 3. The action of raising the forearm represents a third-class lever. Third-class levers always have a mechanical advantage less than one. Activity 2 showed that if the biceps insertion were closer to the resistance, mechanical advantage would improve. Describe another modified design of the human arm that would improve mechanical advantage. Mechanical advantage of the human arm would be improved if the length of the forearm were shorter. This would bring the resistance closer to the effort and decrease the length of the resistance arm. Although the effort arm would remain unchanged in this scenario, shortening the resistance arm has the same effect as lengthening the effort arm in terms of improving mechanical advantage. 4. Sketch one possible way the human arm would look if it were designed to maximize mechanical advantage. Answers will vary, but may include a sketch of the arm with a short forearm, or a sketch with the biceps insertion close to the hand. 5. 10 Teacher's Manual Explain why the human arm is not designed to maximize mechanical advantage. Maximized mechanical advantage comes at a cost to range of motion. In the human body, maximized range of motion of the forearm is more important to function than decreased input of effort force by the biceps muscle. Investigating the Interactions of Muscles and Bones Kit Activity Instructions Activity 1: Antagonistic Muscles This activity illustrates the action of antagonistic muscles, using rubber bands to represent the triceps and biceps. 1. Stretch a rubber band between positions A and B on the arm model. This rubber band represents the biceps muscle. Position A represents the origin of the biceps and position B represents the insertion of the biceps in the human arm. 2. Stretch another rubber band between positions E and F on the arm model. This rubber band represents the triceps muscle, with the origin at E and the insertion at F. 3. Slowly move the end of the forearm up and down. Observe how the triceps and biceps rubber bands change in relation to each other as the arm moves. When the forearm is raised, the biceps rubber band is shorter than the triceps rubber band. This represents contraction of the biceps and relaxation of the triceps to raise the forearm. When the forearm is lowered, the triceps rubber band is shorter than the biceps rubber band. This represents contraction of the triceps and relaxation of the biceps to lower the forearm. The biceps and triceps muscles work antagonistically such that when one is contracted the other is relaxed, and vice versa. 4. Predict how the arm model will move when the biceps contracts. To represent contraction without manually moving the arm, add an additional rubber band between positions A and B and slowly let go of the model. Observe how the arm model moves. 5. Predict what will happen to the arm model if the triceps now contracts to the same degree the biceps was contracted. Add an additional rubber band between positions E and F. Observe how the arm model moves. 6. Both the biceps and the triceps now have two rubber bands and are counterbalanced. Predict what will happen to the arm model if a third rubber band is added to the triceps. Remember that addition of a rubber band represents contraction of the muscle. Test your prediction by adding a third rubber band. Observe how the arm model moves. 7. Removal of a rubber band represents relaxation of the muscle. Predict what will happen to the arm model if two of the rubber bands are removed from the triceps position. Test your prediction by removing two of the rubber bands from the triceps position. Observe how the arm model moves. 8. Experiment freely with the arm model by adding and removing rubber bands, in quantities of your choosing, to and from the triceps (E and F) and biceps (A and B) positions. Observe how the relationship between contraction and relaxation of the antagonistic muscle pair affects whether the arm is raised or lowered. Activity 2: Mec~nical Advantage This activity focuses on the third-class lever design of the human arm. It illustrates how the location of the effort (biceps insertion) in relation to the fulcrum (elbow) affects the amount of effort force necessary to raise the resistance (forearm, mass hanger, and weights). The mechanical advantage provided by the arm at three different insertion points is calculated and compared. 1. Remove all rubber bands from the arm model. Hang the mass hanger with all seven lO-g weights from position G on the end of the forearm. 2. Cut a length of string 80 cm long. Tie a loop at each end of the string, large enough to fit over the cap on the pegs on the model. Thread the string over the peg at position A. 3. Loop one end of the string around the peg at position B on the model. Hang the spring scale by its hook from the loop on the other end of the string, as shown in the figure on page S-2. ©2010 Carolina Biological Supply Company 5-1 Investigating 4. the Interactions of Muscles and Bones Kit Measure the effort force needed to lift the resistance by pulling down on the metal loop of the spring scale until the molded guidelines on the upper and lower arm come together to form a straight, vertical line. Keep the spring scale and string to the left of position F and parallel to the pipe support of the model while pulling down on the scale. Once the molded guidelines are aligned, read the force on the spring scale in Newtons. Maintain a constant pressure on the spring scale. Read the force measurement carefully, as the spring scale will be upside down. The scale ranges from 0 to 10 Newtons in 2-Newton increments. Record the effort force at insertion B in the table on page SA. 5. Move the loop from position B to position C and repeat Step 5 to measure the effort force required at this insertion to raise the resistance. Record the effort force at insertion C in the table on page S-4. 6. Move the loop from position C to position D and repeat Step 5 to measure the effort force required at this insertion to raise the resistance. Record the effort force at insertion D in the table on page S-4. 7. Force (in Newtons) is equal to mass (in kg) x acceleration due to gravity (in m/s2). Calculate the resistance force acting on the arm by multiplying the mass of the forearm, hanger, and weights (0.174 kg) by the acceleration due to gravity (9.81 m/s2). Record this resistance force in the table on page SA. In this activity, the resistance force at positions B, C, and D is constant while the effort force required to lift it varies. 8. Using the effort forces and resistance force, calculate the mechanical advantage provided by the arm at each biceps insertion point. Mechanical advantage is the ratio of resistance force to effort force (FWFE)' Record the mechanical advantage in the table on page S-4. 9. Remove the spring scaje, weights, and string from the arm model. 10. Using the tape measure, measure the distance in centimeters from each biceps insertion point (B, C, and D) to the elbow joint (i.e., the center of the pivot disc, not peg F). This distance is called the effort distance (or effort arm). Record each effort distance in the table on page SA. 11. To illustrate the relationship between effort distance and mechanical advantage, plot the mechanical advantage (y-axis) versus effort distance (x-axis) for each insertion point on the graph on page S-4. Activity 3: Range of Motion This activity illustrates the relationship between effort force provided by the biceps and the range of motion available to the forearm moving a load (mass hanger and weights). 1. Stretch a rubber band between positions A and B on the arm model to represent the biceps muscle. No other rubber bands are needed. 2. Using the tape measure, measure the distance in centimeters from the center of the cap at position G to the top of the base. Record this as the starting distance for position B in the table on page S-4. ©2010 Carolina Biological Supply Company 5-2 Investigating the Interactions of Muscles and Bones Kit 3. Carefully hang the mass hanger with all seven 10-g weights from position G and watch the forearm of the model move. 4. Using the tape measure, measure the ending distance from the center of the cap at position G to the top of the base (if necessary, estimate this distance). Keep the tape measure perpendicular to the base and as straight as possible (the weights may slightly obstruct the line of measurement). Record this distance in the table on page S-4. 5. Calculate the change in distance for position B by subtracting the ending distance from the starting distance. Record this distance (in centimeters) in the table on page S-4. 6. Remove the weight and move the rubber band between positions A and C. Repeat steps 2-5 for position C. 7. Remove the weight and move the rubber band between positions A and D. Repeat steps 2-5 for position D. 8. Compare the "Change in Distance" data for each insertion, and discuss the significance of your findings. ©2010 Carolina Biological Supply Company 5-3 Data Sheet Name 696406A Date Investigating the Interactions of Muscles and Bones Activity 2: Mechanical Advantage Biceps Insertion Effort Force (FE) unit = N Resistance Force (FR) unit = N Mechanical Advantage (FR/FE) Effort Distance (dE) unit = cm B C D Activity 3: Range of Motion Starting Distance unit = cm Biceps Insertion Ending Distance unit = cm Change in Distance unit = cm B C D ©2010 Carolina Biological Supply Company 5-4 Questions 1. The biceps and triceps muscles flank the humerus bone of the upper arm. How, then, are these muscles able to raise and lower the forearm? 2. What does it mean to have a lever with a mechanical advantage greater than one in terms of resistance force versus effort force? 3. The action of raising the forearm represents a third-class lever. Third-class levers always have a mechanical advantage less than one. Activity 2 showed that if the biceps insertion were closer to the resistance, mechanical advantage would improve. Describe another modified design of the human arm that would improve mechanical advantage. 4. Sketch one possible way the human arm would look if it were designed to maximize mechanical advantage. 5. Explain why the human arm is not designed to maximize mechanical advantage. ©2010 Carolina Biological Supply Company 5-5