Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
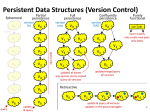
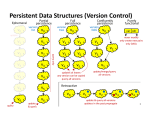
A Survey of Persistent Data Structures GEORGE LAGOGIANNIS1, YANNIS PANAGIS1,2, SPYROS SIOUTAS1,2 AND ATHANASIOS TSAKALIDIS1,2 1 2 Computer Engineering and Informatics Dept. Internet Technologies and Multimedia Unit University of Patras RA Computer Technology Institute Patras, 26504 61 Riga Feraiou str., 26110, Patra GREECE GREECE Abstract: - Several years after the introduction of the notion of persistence by Driscoll et al. [15] we review, in this paper, the most important data structuring paradigms and applications both in main and secondary memory. Key-Words: - Data structures, Persistence, Temporal Databases, Fat node, Node Copying, Node Splitting, Applications. 1 Introduction In commonly used data structures, update operations such as insertions and deletions are catastrophic in the sense that they discard the data structure they are applied to; these data structures are called ephemeral. On the other hand, several application fields require keeping track of all versions a data structure has undergone. Those areas include databases (especially temporal ones), computational geometry, text editing and functional programming languages. These needs were acknowledged in the seminal paper of Driscoll et al. [15], in which the notion of persistent data structures was coined. We concisely present the notion of persistence here. Consider a data structure D. As an update is applied to D, the update leads D from a version vi to its next version vi+1. If persistence is supported, as D undergoes a number of m update operations, all versions v0, v1,…, vm-1 are maintained. There we identify two flavours of persistence, namely partial persistence and full persistence. Partially persistent data structures allow storing and accessing all versions, however modifications can only be applied to the most recent version. On the contrary, full persistent data structures support access and modifications to any version. Suppose a sequence of m updates have already been applied to D. A further update to version vi will generate version vm. There is a third kind of persistence, defined in the paper of Driscoll, Sleator and Tarjan [16], namely confluent persistence. Confluently persistent data structures support an operation which combines two versions of the data structure to yield a new version. Confluently persistent data structures appear when converting meldable data structures, e.g. priority queues, union-find and deques, to persistent. Notably, persistent data structures are also met under the notation purely functional data structures. The term “purely functional”, indicates data structures built using only commands that correspond to LISP commads car, cdr, cons. Those commands create nodes which are immutable and hence fully persistent. Note however that not each fully persistent data structure is purely functional. In the rest of the paper we review in Section 2, general techniques to convert data structures to persistent. Section 3 presents more efficient methods to support persistence for special cases of data structures. Section 4 covers persistence in secondary memory and Section 5 concludes with application areas 2 General Techniques persistent data structures for This section presents general techniques to support persistence in data structures. Generality, in this context, implies that the presented techniques are not instantiated to a specific data structure. General techniques assume the model of a linked data structure of bounded in-degree. Definition 1. A data structure D is called linked data structure of bounded in-degree, iff: 1. It comprises a collection of nodes 2. Each node contains a collection of keys drawn from an ordered set and pointer fields to other nodes. 3. Each node has bounded fan-in. 4. One or more entry points, points where navigation can start, are defined for D. 2.1 Partial and full persistence We first of all consider the pointer machine model of computation. In persistent data structures we further assume that an node maintains with each key k, a list of versions that correspond to the versions of the update operations on k. Driscoll et al. [15] have presented two methods two obtain partial persistence: fat node and node copying. The fat node method is perhaps the most obvious approach. A node is allocated for each node ever present in the data structure. This node is assumed to arbitrarily large and capable to store its entire modification history. Whenever an update to the ephemeral structure is performed, a new version is added to the corresponding fat node. Besides the non-realistic space assumptions, another disadvantage of this approach is the navigation overhead it occurs; if we maintain a fatnode over m update operations, each update or access step is charged an extra O(log m) time1, whereas the extra space is O(1). In the node copying method, fixed size nodes are used. When an update occurs if a persistent node is full then a new node is created, which hosts the most recent data entries. The latter node is linked to the former by means of a copy pointer. Node copying also requires direct ancestors of the updated node to have their pointer fields updated. Direct ancestors are located by maintaining ancesotr poitners. Updates at direct ancestors may potentially lead to cascading of updates. Driscoll et al. [15] were able to prove however that only a constant number of nodes is updated in the amortized sense. Thus, both time and space overheads are amortized O(1). The fully persistent case is considerably involved. The first issue is navigation. At a persistent node one searches for a data value and a version. The rule is that given the data value, follow the version immediately smaller than the sought one. This scheme works fine in partial persistence, nevertheless in full persistence, versions do not evolve linearly but rather in a tree fashion and therefore version ordering is not directly possible. However, version tree can be linearized and subsequently maintained by an order maintainance data structure [14, 32], see [15] for more details. The implementation schemes of [15] for full persistence are two: fat node and node splitting. The fat node method is essentially the same as in the partially persistent case. 1 The time required to navigate over O(m) versions Node splitting is as well a simulation of fat nodes for full persistence, by nodes of fixed size. The intuition is to maintain for each ephemeral node that ever appeared a set of nodes, where each one maintains several ancestor pointers. Recall that updates can occur to any version of the node data fields. In the general case, at each node v participating in an update of field f to version i, two extra nodes may be created. This will lead to updates on ancestors of v. Furthermore, updates of any version may lead v to overflow. Copying is not applicable since any data field version may be valid. Consequently, v must be split into two parts. Apparently, node splittings may cascade throughout the data structure. Nevertheless, it was shown in [15] that only O(1) nodes are affetced in the amortized sense. Therefore, the time and update overhead per access and update step is only O(1) amortized, as long as each ephemeral node is of bounded in-degree. An open issue for some years was how to eliminate the amortization from the bounds of Driscoll et al. An answer to this question for the RAM model of computation was given by Dietz and Raman [13]. The authors designed a pebble game in graphs and thereby managed to obtain the bounds of [15] in the worst case. Brodal [3] presented a combinatorial game to eliminate amortization for partially persistent data structures of bounded indegree in the pointer machine. 2.2 Confluent persistence for general data structures The methods of Driscoll et al. [15], unfortunately do not carry over to the case where confluent persistence is required. The reason is that the navigation between versions becomes impossible, since confluent persistence defines a graph of versions. Other reasons also exist to justify why fully persistent methods fail. One of them is that even a deque with two elements is concatenated with itself n times the resulting persistent structure will occupy 2n nodes. Fiat and Kaplan [18] present efficient methods to transform general linked data structures to confluently persistent. The core of these methods is to succintly represent nodes who have a common “version ancestor”. They showed that if the total number of assignments is U then the update creating version v will cost O(d(v)+log U), where d(v) is the depth of v in the version graph and the space requirements are O(d(v)log U) words. Fiat and Kaplan have also presented more efficient methods. For details see [18]. 3 Persistence for special kinds of data structures The methods of the previous section apply to general data structures. However, more efficient persistent data structures are available for many data structures instances. 3.1 Arrays Dietz [12] studied ways to make arrays and array-based data structures fully persistent. His method was to represent each array as a huge fat node, and handle updates with combinations of the van-Emde Boas tree, perfect hashing and bucketing. Thus, access costs O(log log m) and updates O(log log m) expected amortized time, where m as before is the total number of updates. 3.2 Search Trees Driscoll et al. [15] apply their techniques for full persistence in the case of red-black trees [19] only this time, by modifying the delayed update technique of Tsakalidis [33], bounds are turned to worst case. 3.3 Stacks, queues and deques Stacks, queues and deques are the simplest data structures that can be converted into fully persistent. Results for those data structures relate persistence to functional programming. The most general structure is the double-ended queue or deque for short. It is a doubly linked list where update operations are only allowed at both ends. When only a subset of operations is allowed, we obtain stacks and queues, respectively. We do not refer separately to stacks and queues, since their persistent implementation result from persistent deques. For a complete account on the history of purely functional lists, refer to [23] or to the book of Okasaki [28]. The first fully persistent deque implementation was presented by Chuang and Goldberg [9]. They decompose the deque into two stacks, one for each end of the deque. Stacks can be easily implemented with standard functional commands to be purely functional. Furthermore, they use incremental global rebuilding to ensure that no stack maintains less than a certain number of elements. Thus, they manage to support every persistent operation in O(1) worst case time and space overhead. When the deque catenation repertoire is extended to include catenation of deques the problem boils down to support confluenly persistent operations. The first work on the field was by Driscoll, Sleator and Tarjan [16]. They showed how to perform the k-th deque operation, in O(loglog k) time. An improvement was given by Buchsbaum and Tarjan [8]. They represented a deque as a an unbalanced tree of logarithmic height and consequently, decomposed this tree into paths. The paths were also recursively represented in the same way (structural decomposition). Thereby, they showed that deque catenation costs O(1) and updates at the ends cost O(log*n), where log* n 1 log* (log n) . Finally, Kaplan and Tarjan [23] gave an optimal solution to the deque problem. They represent each deque as a 6-tuple [(p1,d1,s1),(p2,d2,s2)] where each pi and si are non-catenable deques and di are catenable deques recursively defined in the same way2. The entire representation in [23] is considerably complicated. However, the intuition is to associate each recursive level with a digit of a redundant counter [10] and thus to control movements of elements in the same way a redundant counter controls carry propagation. The deque of Kaplan and Tarjan supports each deque operation in O(1) time in the worst case. If it is allowed to resort to amortization (and memoization) Kaplan et al. [22] use similar ideas to [23], in order to derive a simple deque where each operation is performed in O(1) amortized time. 3.4 Priority Queues Brodal and Okasaki [4] have presented a priority queue data structure which supports each operation with O(1) time overhead. 4 Persistence Memory in Secondary Application of persistence to secondary memory data structures is of independent interest since persistence finds a fertile ground in databases. A simple example is that of transaction databases: databases that store information with a certain lifetime. Consider for example a DB for patients in a hospital. Each record stores a unique patient_id and the period for which a patient was hospitalized. In order to retrieve a patient’s history, all time periods for all patients must be stored. This is tantamount to maintain a persistent dictionary, where the indexed information is patient_id and nursing period is an interval [vj, vk], and vj (vk) denotes versions where the patient_id was insertedd (deleted). An extensive treatment of temporal and bitemporal DBs and their relation to persistence can be found in the survey of Salzberg and Tsotras [30]. 4.1 Persistent B-trees The work in this area was initiated by the paper of Lanka and Mays [27]. They present an extension 2 Only that this time their elements are triples (p,d,s) of the above level. of the fat-node technique to devise fully persistent B+-trees. A fat node corresponds to a node of an ephemeral B+-tree. A fat node is simulated by a sequence of fixed size disk blocks. There are two kinds of disk blocks: the data blocks and the version blocks. Data blocks store values and version blocks store relevant versions. An update to a value field causes a new data block to be created copying all the old values and the updated field’s value. Apparently, a fat node may undergo several changes and therefore, its associated version blocks can form a version tree. The height of this tree can be O(logBm). Recall that in the case of node-splitting of Driscoll et al. we were having overflows to the number of version fields. Overflows were handled with node-splitting. This procedure is often termed version splitting in contrast to the situation that occurs in the trees of [27], where a fat node is split when the number of keys after an update cause a block overflow. This case is called key splitting and it is handled with the creation of a new fat node and a new version to the old fat node. The space consumption of this method is huge since it is O(m) blocks in the worst case. Access can be performed in O(logBm (logBn+k/B)) time and updates in O(logBm logBn) time, where n denotes the number of distinct values at the time of the operation and k the answer size. In order to reduce the space requirements of their data structure, Lanka and Mays, propose a method called fat field. In this method the empty fields of a block inside a fat node, store modifications of data fields as long as they don’t create any overflows. If an overflow appears, the version causing overflow and the available data fields at this time are copied to a new fat node. This is time-split. If the number of keys causes key overflow then a key split also occurs. With this method the space occupancy is reduced to O(m/B). Optimal partially persistent B+-trees have also been developed: the Multi Version B-Tree (MVBT) of Becker et al. [Becker et al. 97] and the Multi Version Access Structure (MVAS) of Varman and Verma [34]. The above methods share essentially the same ideas however MVAS has slightly better space consumption constant. The key principle is not to simulate fat nodes with blocks, but to embed time information in the Btree hierarchy. More specifically, the tree maintains records with data fields and timestamps. Separate thresholds are defined to control version overflows and underflows in blocks. When an update is performed to a block, the block might overflow. Active nodes a then copied to a new block. Then, a time split takes place, if necessary and updates are propagated one level up the tree. Analogously, a deletion may cause the number of active nodes to underflow. In this case on the one hand the two structures try to reduce space consumption. MVBT tries to retrieve records from a sibling having enough versions and copy all them to the underflowed node. MVAS does not copy all of them; just a fraction is adequate and therefore achieves better space utilization. Overall, space consumption is O(m/B) in both cases and updates can be performed in O(logBn) amortized time, where n is the number of active values at a time. An important trait of both structures is that they can answer stabbing queries and range queries at O(logBn+a/B) time, i.e. their performance depends entirely on the number of active versions. Arge et al. [2] have presented their practical implementation of a partially persistent B-tree. The ideas presented [2] do not significantly deviate from MVBT or MVAS. The main difference is that they do not use indexing nodes but their structure is node-oriented. This choice was dictated by the specific problem they had to solve, planar point location, which only allows for partial ordering between the elements in the structure. Time and space bounds are the same as the previous structures. 4.2 Bi-temporal (partially persistent) R-trees Kumar et al. [25] have developed a partial persistent version of the well-known R-tree data structure [20], which is termed, Bi-temporal R-tree (BTRT). The motivation behind BTRT was to efficiently solve the indexing problem for “bitemporal” data, i.e. data that have both “valid time” and “transaction time” attributes. For more details see [30]. Since the ephemeral R-tree bears strong conceptual similarities to B-trees, the BTRT bears significant similarities with the partially persistent data structures of [34] and [5]. More specifically, the BTRT applies the same policies for updates with its B-tree counterparts; if an insertion renders a node full, time-split and perhaps key split is applied. Deletions may also create version underflows. In contrast to ephemeral R-trees, the BTRT applies several heuristics to merge and underflowed page with its siblings. Another notable characteristic is that even though updates alter the spatial attributes of index nodes, they do not create new versions to internal nodes, which is not the case in MVBT and MVAS. Furthermore, deletions do not cause an enclosing rectangle at an index node to shrink, since the leaves at each subtree will still be enclosed after the logical deletion. 5 Applications Persistent data structures literally have a myriad of applications. We list the most important of them without going into much detail and redirect the interested reader to the relevant publications. First of all persistent data structures can facilitate list and set manipulation in functional languages, where data is immutable. Confluently persistent lists have applications to continuation passing in functional programming languages [23]. Driscoll et al. [15] mention among the applications of persistent data structures the possibility of using them to incremental text editing and program editing [29]. Liu [26] has also used persistent data structures for debugging purposes on a very high-level programming language. A further application field for persistent data structures is CAD [11] Persistent data structures have met numerous applications in Computational Geometry. The most classical example of such application is the solution to the planar point location problem, by Sarnak and Tarjan [31]. The external memory version of this problem was studied by Arge et al. [2]. Another bulk of applications use persistence to reduce space complexity in algorithms which incrementally process a collection of geometric objects, in some standard direction. Examples of those algorithms include, hidden line elimination [24], dominance pair reporting [7] and quadrant range searching on a grid [JUCS]. Bouroujerdi and Moret [6]give some further applications of persistence including solutions to classical geometric problems. A few more geometric applications can be found in the excellent survey of Kaplan [21]. Finally, a large share of applications is met in the area of temporal databases. Salzberg and Tsotras [30] present persistent secondary memory index methods, as the most provably efficient methods to solve “transaction time” and “bi-temporal” problems. Kumar et al. [KMT98] provide quite a few applications for bi-temporal indexing methods such as: accounting [35], medical [17], financial [1]. 6 Conclusions Persistent data structures have been proved quite influential throughout the years, providing the fundamental building block for applications in computational geometry, functional programming, temporal databases, etc. In this paper we have presented an overview of persistent data structures, covering both main memory and secondary memory solutions. We have also presented some of their applications in the hope to see more of them in the future. Acknowledgements The authors would like to thank the European Social Fund (ESF), Operational Program for Educational and Vocational Training II (EPEAEK II) and particularly the Program PYTHAGORAS, for funding the above work. References: [1] Ariav, G. Information Systems for Managerial Planning and Control: a Conceptual Examination of their Temporal Structure. Journal of MIS, Vol.9, No.2, 1992, pp.77-98. [2] Arge, L., Danner, A. and Teh, S.-M. I/OEfficient Point Location Using Persistent BTrees, ACM J. on Experimental Algorithms, Vol. 8, 2003. [3] Brodal, G.S., Partially Persistent Data Structures of Bounded Degree with Constant Update Time, Nordic Journal of Computing, Vol. 3, No. 3, 1996, pp. 238-255. [4] Brodal, G.S., and Okasaki, C. Optimal Purely Functional Priority Queues. J. Funct. Program. Vol.6, No. 6, 1996, pp.839-857. [5] Becker, B., Gschwind, S., Ohler, T., Seeger, B., and Widmayer, P., An Asymptotically Optimal Multiversion B-tree, The VLDB Journal, Vol. 5, No. 4, 1996, pp. 264-275. [6] Bouroujerdi, A., and Moret, B., Persistence in Computational Geometry, In Proc. 7th Canadian Conference in Computational Geometry, (CCCG95), 1995, pp. 241-246. [7] Bozanis, P., Kitsios, N., Makris, C., and Tsakalidis, A.K. The Space-Optimal Version of a known Rectangle Reporting Algorithm. Information Processing Letters, Vol. 61, 1997, pp. 37-41. [8] Buchsbaum and R. E. Tarjan. Confluently persistent deques via data structural bootstrapping. J. of Algorithms, 18:513-547, 1995. [9] Chuang, T.R., Goldberg, B. Real-time deques, multihead Turing machines, and purely functional programming, in proc. of the conference on Functional programming languages and computer architecture, 1993, pp.289-298. [10] M. J. Clancy, D.E. Knuth, A programming and problem-solving seminar, Technical Report STAN-CS-77-606, Department of Computer Science, Stanford University, Palo Alto, 1977 [11] Chou, H., and Kim, W. A Unifying Framework for Version Control in a CAD environment. In Proc. VLDB, 1986 [12] P.F. Dietz, Fully Persistent arrays, In Proc. WADS 89, pp. 67-74. [13] Dietz, P. And Raman, R. Persistence, amortization and randomization, in proc. of the 2nd ACM-SIAM Symposium on Discrete Algorithms, SODA91, 1991, pp. 78-88. [14] Dietz, P. and Sleator, D.D. Two algorithms for maintaining order in a list, in Proceedings 19th Annual ACM Symp. on Theory of Computing, 1987, pp. 365-372. [15] Driscoll, J.R., Sarnak, N., Sleator, D., and Tarjan, R.E. Making Data Structures Persistent. J. of Comp. and Syst. Sci. Vol 38, No. 1, 1989, pp. 86-124. [16] Driscoll, J.R., Sleator, D., and Tarjan, R.E. Fully persistent lists with catenation. J. of the ACM, Vol. 41, 1994, No. 5, pp. 943-959. [17] Fries, J.F. Time-oriented Patient Records and a Computer Databank. Journal of Am .Med. Assoc., Vol. 222, No. 12, 1972. [18] Fiat, A., and Kaplan, H. Making data structures confluently persistent, Journal of Algorithms, Vol. 48, No. 1, 2003, pp. 16-58. [19] Guibas, L. J. and Sedgewick, R., A dichromatic framework for balanced trees, in proc., 19th Annual IEEE Symp. on Foundations of Computer Science, 1978, pp. 8-21. [20] Guttman, A. R-Trees: A Dynamic Index Structure for Spatial Searching. in proc. ACM SIGMOD Conf., 1984, pp. 47-57. [21] Kaplan, H., Persistent Data Structures, in Handbook of Data Structures, CRC Press, Mehta, D., and Sahni, S., (eds.), 2004. [22] Kaplan, H., Okasaki, C., and Tarjan, R. E. Simple confluently persistent catenable lists. SIAM J. Comput. Vol 30, No. 3, 2000, pp. 965977. [23] Kaplan, H., and Tarjan, R.E. Purely functional, real-time deques with catenation, J. of the ACM, Vol. 46, No. 5, 1999, pp. 577-603. [24] Kitsios, N., and Tsakalidis, A.K., Space Optimal Hidden-Line Elimination for Rectangles, Information Processing Letters, Vol. 60, 1996, pp. 195-200. [25] Kumar, A., Tsotras, V.J., Faloutsos, C., 1998, Designing access methods for bitemporal databases, IEEE Trans. Knowl. Data Eng. 10, 1 (Jan./Feb.), 1998. [26] Liu, Z., A persistent runtime system using persistent data structures, in proc. of the ACM Symposium on Applied Computing, (SAC), 1996, pp. 429-436. [27] Lanka, S. and Mays, E. (1991). Fully Persistent B+-trees. In Proceedings of ACM SIGMOD Conference on Management of Data, pages 426435, 1991. [28] Okasaki, C. Purely Functional Data Structures, Cambridge University Press, 1998. [29] Reps, T., Teitelbaum, T., and Demers, A., Incremental context-dependent analysis for language-based editors, ACM Trans. Program. System. Lng., Vol. 5, 1983, pp. 449-477. [30] Salzberg, B., and Tsotras, V. Comparison of Access Methods for Time-Evolving Data. ACM Computing Surveys, Vol. 31, No. 2, 1999, pp. 158-221. [31] Sarnak, N., and Tarjan, R.E., Planar point location using persistent search trees, Comm. ACM, Vol. 29, 1986, pp. 669-679. [32] Tsakalidis, A.K., Maintaining order in a generalized linked list, Acta Inform., Vol. 21, 1984, pp. 101-112. [33] Tsakalidis, A.K., AVL-trees for localized search, Inform. and Control Vol. 67, 1985, pp. 173-194. [34] Varman, P., and Verma, R. An efficient multiversion access structure, Trans. On Knowledge and Data Eng¸ Vol. 9, No. 3, 1997, pp. 391-409. [35] Weber, R. AuditTrail System Support in Advance Computer-based Accounting Systems. The Accounting Review, Vol. LVII, No. 2, 1982 pp. 311-325.