Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
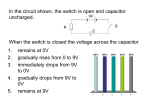
MODELING OF ELECTRICAL SYSTEMS 1st METHOD Current Law (Kirchoff) Voltage Law 2nd METHOD Current Law Magnetic Energy, Electrical Energy, Virtual Work: Application of Lagrange’s Equation 2nd method is used in this course. FUNDAMENTAL ELEMENTS OF ELECTRICAL SYSTEMS Passive Elements L x Analogy Between Mechanical and Electrical Systems . .. x Velocity (m/s) x Acceleration (m/s2) Generalized Coordinates q Charge (Coulomb) + R C Displacement (m) Active Elements i Current (Amper) di dt m Mass (kg) k c Spring Stiffness Damping Constant (N/m) (Ns/m) f mx 1 E1 mx 2 2 f kx 1 E 2 kx2 2 L 1/C Inductance C:Capacitance (Farad) (Henry) di dt Generalized Charges VL Lagrange’s Equation 1 E1 Lq 2 2 Op-Amp f Force (N) f cx W cx x R Resistance (Ohm) W f x V Voltage (Volt) 1 V Ri q C W Vq 1 2 W Rq q E2 q 2C V x Analogy Between Mechanical and Electrical Systems . .. Displacement (m) x Velocity (m/s) x Acceleration (m/s2) m Mass (kg) k c Spring Constant Damping Constant (N/m) (Ns/m) f Force (N) θ . θ .. θ IG Kr Cr Angular Dispalement Angular Velocity Angular Acceleration Mass moment of inertia Rotational spring constant Rotational damping constant (Nm/rad) Nm/(rad/s) M Moment (Nm) V Voltage (Volt) δW (rad) (rad/s) (rad/s2) (kg-m2) q Charge (Coulomb) i Current (Amper) L 1/C Inductance (Henry) C:Capacitance (Farad) R Resistance (Ohm) E2 E1 E1 E2 δW 1 2 q 2C W Rq q 1 E1 Lq 2 2 E2 W Vq Current through R1= q q 2 Modeling of Electrical Systems: V1: Input q and q2 : Generalized charges 1 2 1 2 E1 Lq E2 q2 2 2C W V1q R 1 (q q 2 )(q q 2 ) R 2q 2 q 2 Example 3.1: L + V1 C q 2 q - R1 R2 ( V1 R 1q R 1q 2 )q ( R 1q R 1q 2 R 2q 2 )q 2 Qq Qq2 d (E1 E 2 ) (E1 E 2 ) Qq dt q q V1 R 1q R 1q 2 Lq d (E1 E 2 ) (E1 E 2 ) Qq 2 dt q 2 q 2 1 q 2 R 1q ( R 1 R 2 )q 2 C R 1 q 0 0 q V1 0 1 R 1 R 2 q 2 q 0 C 2 L=3.4 mH, C=286 µF, R1=3.2 Ω, R2=4.5 Ω R 1 L 0 q 0 0 q 2 R1 Ls 2 R 1s R 1s R 1s 1 0 ( R 1 R 2 )s C D(s)=0.02618s3+26.288s2+11188.81s=0 Eigenvalues: 0, -502.06±418.70i (ξ=0.768) Example 3.2 C1 q 4 C2 R1 q 1 V1 q 3 q 3 q 2 q f No current flow through Op-Amp q 1 q 2 q 3 q 4 q 4 q 1 q 2 q 3 q 4 q 3 q f R3 E1 0 E2 + R2 q f q 1 q 2 q 3 q 3 q 1 q 2 1 1 2 (q 1 q 2 q 3 ) 2 q3 2C1 2C2 W V1q1 V2 (q1 q 2 ) R 1q 1q1 V2 R 2q 2q 2 R 3q 3q 3 Input : V1 Generalized charges: q1, q2, q3 1 (q1 q 2 q 3 ) V1 V2 R 1q 1 C1 1 (q1 q 2 q 3 ) V2 R 2q 2 C1 1 1 (q1 q 2 q 3 ) q 3 R 3q 3 For Op-Amp : V+=V-=0 C1 C2 1 1 1 C C C 1 1 q1 R 1 0 R 3 q 1 1 V1 1 1 0 R q 1 R q 2 0 2 3 2 C1 C1 C1 0 R 3 q 3 1 0 1 1 1 q 3 0 C1 C1 C1 C 2 R 3q 3 V2 R1 0 0 0 R2 0 1 C R 3 q 1 1 1 R 3 q 2 C1 R 3 q 3 1 C1 R 1s 1 C1 1 C1 1 C1 1 C1 R 2s 1 C1 1 C1 1 C1 1 C1 1 C1 1 C1 q V 1 1 1 q 0 2 C1 1 1 q 3 0 C1 C 2 1 C1 1 R 3s 0 C1 1 1 R 3s C1 C 2 R 3s R1=15.9 kΩ, R2=837 Ω, R3=318 kΩ, C1=C2=0.005 µF Eigenvalues: 0, -628.93±12561.76i (ξ=0.05) GAIN CIRCUIT R2 q q R1 V1 + q V1 R 1q 0 0 R 2q V2 V2 V1 R1 R2 V1 V2 R1 V2 V2 R2 V1 R1 R1 V1 q R2 R2 V1 R1 R q R + V2' + V2 R V2 2 V1 R1 V2 R R R R V2 2 V1 2 V1 R R R1 R1 INTEGRAL CIRCUIT C q R q V1 + V2 V2 1 V1dt RC Rq V1 V1 Rq 0 0 1 q V2 C q 1 V1 R q q dt V2 1 V1dt R 1 V1dt RC Negative sign can be eliminated bu adding an extra gain circuit with gain=1 q 3 R R Vc (V1 V2 V3 ) R V3 R V2 V1 q 1 q V1 Rq 1 0 q 1 + Vc V V V R 1 2 3 Vc R R R V2 Vc V1 V2 V3 R R q 1 V V2 , q 3 3 R R q q 1 q 2 q 3 0 Rq Vc q 2 R V1 V1 R Vc V1 V2 R + R q + V1 Vc q 2 + V2 0 q R Vc 0 q R Vc q q 1 q 2 R V1 Rq 1 0 R V q 1 1 R V2 q 2 R 0 q 2 V2 R V V Vc R 1 2 R R Vc V1 V2 Vc R2 V2 K P V1 K I V1dt K D R1 + R dV1 dt R2 1 K D R 4C4 KP KI R1 R 3C 3 C3 R R3 + R + R4 V1 C4 + R V2 PID Control Circuit PID circuit is used frequently in Control Systems.