Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Chapter 4
Semicontinuities of Multifunctions and
Functions
The notion of the continuity of functions is certainly well known to the reader. This topological
notion plays an important role also for multifunctions. It is not surprising that for general objects
as multifunctions are, several types of continuity can be introduced and these continuities often but
not always coincide when applied to a function.
4.1 Lower and upper semicontinuity
We start the study of various types of continuity of multifunctions by reminding the well known
continuity conditions of functions between topological spaces (X, τ) and (Y, σ). A function
f : (X, τ) → (Y, σ)
is continuous if any of the following mutually equivalent conditions is satisfied (in these conditions
U is an arbitrary subset of X and V is an arbitrary subset of Y)
(a1) V is open in (Y, σ) ⇒ f −1 [V] is open in (X, τ)
(a2) f [U] ⊂ f [U]
˚
(a3) f −1 [V̊] ⊂ f −1 [V]
(a4) ∀x ∈ X: V is a neighbourhood of f (x) ⇒ f −1 [V] is a neighbourhood of x
(b1) V is closed in (Y, σ) ⇒ f −1 [V] is closed in (X, τ)
(b2) f −1 [V] ⊃ f −1 [V]
˚
(b3) f + [V̊] ⊂ f + [V]
54
4.1 Lower and upper semicontinuity
55
(b4) ∀x ∈ X: V is a neighbourhood of f (x) ⇒ f + [V] is a neighbourhood of x
These conditions need not be equivalent for a multifunction, however, the conditions (a1)-(a4)
stay mutually equivalent and also conditions (b1)-(b4) are mutually equivalent for an arbitrary
multifunction. This leads us to two definitions of semi-continuity of multifunctions. As we will
need also a local concept of semi-continuity of multifunction, we introduce it by the following
definition.
Definition 4.1. (a) We say that a multifunction F : X −−≺ Y is lower [upper] semi-continuous at a
point x ∈ X if for every open set V ⊂ Y exists an open set U ⊂ X such that
F(x) ∩ V , ∅ ⇒ x ∈ U ⊂ F −1 [V]
F(x) ⊂ V ⇒ x ∈ U ⊂ F + [V] .
(b) We say that F is a lower [upper] semi-continuous multifunction on a set M ⊂ X if it is lower
[upper] semi-continuous at every point from M. If F is lower [upper] semi-continuous at every
point of its domain X, then we simply say that F is a lower [upper] semi-continuous multifunction
and we will use the abbreviation l.s.c [u.s.c].
(c) We say that F is continuous multifunction (at a point x ∈ X) if it is both upper and lower
semi-continuous (at the point x).
Using the neighbourhood concept of a set (of a point), the semi-continuity can be expressed in
the following way: F is upper semi-continuous at a point x if the upper pre-image F + [V] of any
neighbourhood V of the full image F(x) is a neighbourhood of the point x. Similarly F is lower
semi-continuous at a point x if the lower pre-image F −1 [V] of any neighbourhood V of each point
y ∈ F(x) is a neighbourhood of the point x.
Proposition 4.2. For any multifunction F : X −−≺ Y the following statements are equivalent for
any sets U ⊂ X and V ⊂ Y:
(i) F is l.s.c. at a point x0
(ii) F(x0 ) ∩ V̊ , ∅ ⇒ F −1 [V̊] is a neighbourhood of x0
˚
(iii) x0 ∈ F −1 [V̊] ⇒ x0 ∈ F −1 [V]
(iv) x0 ∈ U ⇒ F(x0 ) ⊂ F[U]
Proof. (i) ⇒ (ii) because V̊ is an open neighbourhood of a chosen point y ∈ F(x0 ) ∩ V̊ and F −1 [V̊]
is a neighbourhood of x0 iff there exists an open set O ⊂ X such that x0 ∈ O ⊂ F −1 [V̊].
(ii) ⇒ (i) is straightforward since for an open set V ⊂ Y we have V = V̊ and F −1 [V] is a
55
4.1 Lower and upper semicontinuity
56
˚
neighbourhood of x0 iff x0 ∈ F −1 [V].
˚
(ii) ⇒ (iii) since F −1 [V̊] is a neighbourhood of x0 iff x0 ∈ F −1 [V] and obviously
˚
F −1 [V̊] ⊂ F −1 [V̊] ⊂ F −1 [V].
(iii) ⇒ (ii) because if the implication in (iii) holds for any set V ⊂ Y then it holds true also for any
open set V = V̊, i.e.
˚
˚
x0 ∈ F −1 [V̊] ⇒ x0 ∈ F −1 [V̊],
˚
but V̊˚ = V̊, and x0 ∈ F −1 [V̊] is equivalent to say that F −1 [V̊] is a neighbourhood of x0 .
(iii) ⇒ (iv) for each y ∈ F(x0 ) and any neighbourhood V of y there exists a neighbourhood O of
x0 such that for any x the implication holds true
x ∈ O ⇒ F(x) ∩ V , ∅.
Since x ∈ U, we have O ∩ U , ∅, and so there exists x0 ∈ O ∩ U with
∅ , F(x0 ) ∩ V
and
F(x0 ) ⊂ F[U].
This gives V ∩ F[U] , ∅ and hence y ∈ F[U].
(iv) ⇒ (iii) Let us proceed by contradiction, supposing the implication (iii) were not true. Then
there exists y ∈ F(x0 ) and its neighbourhood V 3 y such that in each neighbourhood N of x0 there
exists a point xN ∈ N such that F(xN ) ∩ V = ∅. Hence the set
MN := {x ∈ N | F(x) ∩ V = ∅} , ∅,
and if we consider the set
U :=
[
{MN | N is a neighbourhood of x}
then x0 ∈ U. But y < F[U] because ∀x ∈ U : F(x) ∩ V = ∅, and consequently
[
[
∅=
{F(x) ∩ V | x ∈ U} = V ∩ {F(x) | x ∈ U} = V ∩ F[U].
It gives a contradiction with the conclusion in (iv), namely F(x0 ) ⊂ F[U] .
THEOREM 4.3. For every multifunction F : X −−≺ Y the following statements are equivalent
(a1) F is l.s.c.,
(a2) V ⊂ Y ⇒ F −1 [V̊] is open,
56
4.1 Lower and upper semicontinuity
57
˚
(a3) V ⊂ Y ⇒ F −1 [V̊] ⊂ F −1 [V],
(a4) U ⊂ X ⇒ F[U] ⊂ F[U] ,
(a5) The associated set-valued function F̂ : X → P(Y) is continuous when we consider the lower
topology L on P(Y), generated by the subbase {P(Y) \ P(K) | K closed in Y}.
Proof. Immediate consequence of Proposition 4.2 and the fact that F is l.s.c. iff it is l.s.c. at each
point x0 ∈ X.
Proposition 4.4. For every multifunction F : X −−≺ Y the following statements are equivalent for
any set V ⊂ Y:
(i) F is u.s.c. at a point x0 ,
(ii) F(x0 ) ⊂ V̊ ⇒ F + [V̊] is a neighbourhood of x0 ,
˚
(iii) x0 ∈ F + [V̊] ⇒ x0 ∈ F + [V],
(iv) x0 ∈ F −1 [V] ⇒ x0 ∈ F −1 [V].
Proof. (i) ⇔ (ii) ⇔ (iii) is easy to prove from the definition of upper semicontinuity and it is
similar to the proof of similar equivalences in Proposition 4.2.
(iii) ⇒ (iv) let us suppose there exists V ⊂ Y verifying
x0 ∈ F −1 [V] \ F −1 [V].
Then F(x0 ) ∩ V = ∅ which means that
F(x0 ) ⊂ Y \ V ⊂ Y \ V.
Using (iii) there exists a neighbourhood U of x0 with the property:
U ⊂ F + [Y \ V] = X \ F −1 [V],
i.e. U ∩ F −1 [V] = ∅ which contradicts the assumption x0 ∈ F −1 [V].
(iv) ⇒ (iii) let us choose arbitrary set V ⊂ Y such that x0 ∈ F + [V̊]. Then
F(x0 ) ∩ (Y \ V̊) = ∅,
and hence x0 < F −1 [Y \ V̊]. Using (iv) we have
x0 < F −1 [Y \ V̊],
57
4.1 Lower and upper semicontinuity
58
and therefore there exists a neighbourhood U of x0 satisfying U ∩ F −1 [Y \ V̊] = ∅. Then the
following relationships hold
x0 ∈ U ⊂ X \ F −1 [Y \ V̊] = F + [V̊] ⊂ F + [V],
and this implies
˚
x0 ∈ F + [V].
THEOREM 4.5. For any multifunction F : X −−≺ Y the following statements are equivalent
(b1) F is u.s.c. ,
(b2) V ⊂ Y ⇒ F + [V̊] is open in X,
˚
(b3) V ⊂ Y ⇒ F + [V̊] ⊂ F + [V]
(b4) V ⊂ Y ⇒ F −1 [V] ⊂ F −1 [V], consequently F −1 [V] is closed in X,
(b5) The associated set-valued function F̂ : X → P(Y) is continuous if we consider the upper
topology U on P(Y), generated by the base {P(G) | G is open in Y}.
Proof. An immediate consequence of Proposition 4.4 and the fact that u.s.c. means u.s.c. at each
point x0 ∈ X.
Remark 4.6. Using our convention that the notation of a multifunction in the form F : X −−≺ Y
means that DF = X and hence F is in fact a correspondence of X into Y, the above definition of
semicontinuity was done for correspondences. It can be applied without change to any multifunction F from X to Y, i.e. F ⊂ X × Y with F(x) = ∅ when x ∈ X \ DF , i.e. to the associated set-valued
function F̂ : X → P(Y). In such case obviously F is l.s.c. at any point x0 ∈ X \ DF and is u.s.c. at
x0 ∈ X \ DF only if x0 is an interior point of X \ DF , F cannot be u.s.c. at any point x0 ∈ DF \ DF
which is a point in the boundary of DF not in DF . So if DF is closed in X then F is continuous
(i.e. lower as well as upper semicontinuous) at any point x0 ∈ X \ DF . Because of this it is more
common to define the notion of semicontinuity for a general multifunction F ⊂ X × Y in the way
where the topological notions are relativised to the subspace DF of X (when applicable).
The following examples show that the notions of lower and upper semicontinuity are independent and also give good graphic intuition for these notions.
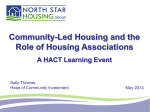
Example 4.7. (a) The correspondence F1 : R −−≺ R defined by
[−1, 1], if x , 0
F1 (x) :=
{0} if x = 0
58
4.1 Lower and upper semicontinuity
59
is lower semicontinuous at x = 0 but it is not upper semicontinuous at that point. In the Cartesian
graph of F1 shown in the left panel of Figure 4.1 we can see that big values F1 (x) = [−1, 1] can
shrink down rapidly to a small value F1 (0) = {0} and the lower semicontinuity will be preserved.
(b) The correspondence F2 : R −−≺ R defined by
{0} if x , 0
F2 (x) :=
[−1, 1] if x = 0
is upper semicontinuous at x = 0 but it is not lower semicontinuous at that point. In the Cartesian
graph of F2 shown in the right panel of 4.1 we can see that small values F2 (x) = {0} can rapidly
grow up to a big value F2 (0) = [−1, 1] and the upper semicontinuity will be preserved.
1
1
−1
−1
Figure 4.1: Left (right) panel shows the Cartesian graph of the multifunction F1 (F2 ) from Example
4.7.
The above mentioned results may raise an impression in the reader that there are seemingly
parallel statements for lower semicontinuous and upper semicontinuous multifunctions. But these
continuity concepts are far from being equally flexible constructs. They are not. For non-compact
valued multifunctions, upper semicontinuity is difficult to achieve. G. Choquet showed in his paper
[8] that the vertical line multifunction F : R −−≺ R2 , F(x) := {x} × R which intuitively ought to
satisfy any reasonable continuity requirement fails to be u.s.c. at any point. The characterization
of semicontinuity by net convergence is another example of asymmetry between lower and upper
semicontinuity.
Continuity at a point of a function from topological space X to topological space Y can be described
by net convergence in the form that for any net (xι )ι∈D → x0 we have f (xι ) → f (x0 ). If we want
to extend this characterization to set-valued maps we must introduce the notion of convergence for
nets of sets.
Definition 4.8. (a) Reflexive and transitive relation on a nonempty set D is called a preordering
and the pair (D, ) is called a preordered set.
(b) If is a preorder on D and A, E ⊂ D we define the set of upper [lower] bounds of the set A in
59
4.1 Lower and upper semicontinuity
60
the set E by
AM (E) := {d ∈ E | ∀a ∈ A : d a}
O
A (E) := {d ∈ E | ∀a ∈ A : a d} .
When E = D we use simpler notation AM and AO respectively, and also for d ∈ D, {d}M =: dM and
{d}O =: dO .
(c) The preordered set (D, ) is called a directed set if any two element set {d1 , d2 } ⊂ D has an
upper bound in D, i.e. {d1 , d2 }M , ∅. The subset B ⊂ D is called a residual set in (D, ) if
∃d0 ∈ D : d0M ⊂ B.
C ⊂ D is called a cofinal set in D if
∀d ∈ D : dM ∩ C , ∅,
i.e. if each element from D has an upper bound in C, or dM (C) , ∅.
Example 4.9. (a) Both sets R and N are directed sets with the natural ordering relation ≥. Moreover
N is cofinal in R (but not vice-versa).
(b) In any topological space (X, τ) the open neighbourhood base at a given point x
τ(x) := {U ∈ τ | x ∈ U}
is a directed set by the inclusion ⊂, i.e.
∀U1 , U2 ∈ τ(x) ∃U ∈ τ(x) | U ⊂ U1 ∩ U2 .
Some useful properties of residual and cofinal sets are given in Exercise 4.1.
Definition 4.10. Let (D, ) be a directed set. Then any mapping s : D → Y, is called a net in
Y. The value s(d) is denoted sd and the net s itself is denoted (sd : d ∈ D) or just (sd ) when D
is understood by the context. When s is a set-valued mapping i.e. Y ⊂ P(X), it is called a net of
subsets of X.
From Example 4.9(a) we can conclude that any sequence s : N → X can be considered as a
net when N is directed by the natural order ≥. There are plenty of other preorders which can direct
the set N (for example ≤, or the divisibility relation a|b ⇔ ∃k ∈ N : b = ka) but when nothing is
specified about order in N we will always suppose the natural order ≥ on N.
An important notion is a subnet of the given net just like a subsequence is an important notion
for the sequences. We know that a sequence b = (bn )n∈N is a subsequence of the sequence a =
(an )n∈N iff there exists an increasing sequence k : N → N such that bn = akn i.e. b = a ◦ k. For
nets the situation is a little bit complicated since domains of different nets can be different directed
sets. But the scheme from subsequences can be maintained if we replace the increasing sequence
k by a more general notion of a residual mapping.
60
4.1 Lower and upper semicontinuity
61
Definition 4.11. Let (D, D ) and (E, E ) be directed sets. Then the mapping r : E → D is called
a residual mapping if the pre-image of any residual subset in D is a residual subset in E.
The following proposition gives several characterizations of residual mappings.
Proposition 4.12. Each of the following statements is equivalent to the fact that the mapping
r : (E, E ) → (D, D ) is residual:
(i) ∀d ∈ D : r−1 [dM ] is residual in E,
(ii) ∀d ∈ D ∃e ∈ E : eM ⊂ r−1 [dM ],
(iii) ∀d ∈ D ∃e ∈ E | ∀e0 E e : r(e0 ) D d,
(iv) ∀C ⊂ E cofinal: r[C] is cofinal in D. Because of this property, some authors call r a cofinal
mapping.
Proof. The reader is asked to do it in Exercise 4.2.
Using the notion of residual mapping we can introduce the notion of a subnet of the given net.
Definition 4.13. A net t : (E, E ) → X is called a subnet of the net s : (D, D ) → X, and we
write t ∝ s, if there exists a residual map r : E → D such that t = s ◦ r i.e. the diagram shown in
Figure 4.2 commutes.
s
D
X
r
t
E
Figure 4.2:
Now we can define two types of limits for a net of subsets of the topological space (X, τ).
Definition 4.14. Let (Aι )ι∈I be a net of subsets of the topological space (X, τ). A point x0 ∈ X is
called
(a) a limit point of the net (Aι ) if each neighbourhood of x0 intersects (Aι ) for all ι in some
residual subset of I. We denote the set of all limit points of (Aι ) by Li(Aι : ι ∈ I) or just LiAι
and call it a residual limit of (Aι ) (some authors call it a lower topological limit or a lower
closed limit).
Hence we can write
x0 ∈ Liι∈I Aι
⇔
61
∀U ∈ τ(x0 ) ∃ι0 : ∀ι ι0 : U ∩ Aι , ∅.
4.1 Lower and upper semicontinuity
62
(b) A point x1 ∈ X is called a cluster point of the net (Aι ) if each neighbourhood of x1 intersects
(Aι ) for all ι in some cofinal subset of I. We denote by Ls(Aι : ι ∈ I) or just by LsAι the set
of all cluster points of (Aι ) and call it a cofinal limit of (Aι ) (alternative terminology is an
upper topological limit or upper closed limit).
(c) We say that a net (Aι ⊂ X)ι∈I is Kuratowski-Painlevé convergent to a set A ⊂ X, and we
write
A = K − lim Aι ,
provided
LiAι = LsAι = A.
Since obviously LiAι ⊂ LsAι to verify that A = K−lim Aι , it is necessary and sufficient to prove
the inclusions A ⊂ LiAι , LsAι ⊂ A. Before giving a net characterization of the lower semicontinuity
of multifunctions, we prove the following characterization of the lower and upper limits.
Proposition 4.15. For any net of sets (Aι )ι∈I in a topological space (X, τ) the following equivalences
are true
(a)
x0 ∈ LiAι
⇔
∃ι0 ∈ I ∀ι ι0 ∃xι ∈ Aι : (xι )ιι0 → x0
(b)
x0 ∈ LsAι
⇔
∀ι ∈ I ∃ι0 ι ∃xι0 ∈ Aι0 : (xι0 ) → x0
Proof. We prove (a) and leave to the reader the similar proof of (b).
(⇐) If U ∈ N(x0 ) then ∃ιU ∈ I ∀ι ιU : xι ∈ U. Then ∃ι1 ∈ I : ι1 ι0 , ιU and for any ι ι1 we
have
xι ∈ U ∩ Aι , ∅,
hence x0 ∈ LiAι .
(⇒) This implication is true if LiAι = ∅. So suppose that LiAι , ∅ and then there exists a
neighbourhood V = X of x0 and consequently there exists ι0 ∈ I such that ∀ι ι0 : Aι ∩X = Aι , ∅.
Then the set
D := {(ι, V) ∈ I × N(x0 ) | Aι ∩ V , ∅} , ∅
is directed by the relation
(ι, V) < (ι0 , V 0 )
⇔
ι ι0 & V ⊂ V 0 ,
and we can define the net
t := (xι,V ∈ Aι ∩ V : (ι, V) ∈ D)
which converges to x0 because for any neighbourhood W 3 x0 ∃ιW ∈ I ∀ι ιW : Aι ∩ W , ∅.
Hence (ιW , W) ∈ D and for each (ι, V) < (ιW , W) we have
xι,V ∈ Aι ∩ V ⊂ Aι ∩ W ⊂ W.
62
4.1 Lower and upper semicontinuity
63
Now we are going to construct a subnet s = (xι ∈ Aι )ιι0 of the net t. Consider the first projection
π : D → I,
(ι, V) 7→ ι,
which maps D on the residual subset of I.
π[D] = {ι ∈ I | ∃V ∈ N(x0 ) : Aι ∩ V , ∅} ⊃ ιM0 .
Consider any selection σ of the inverse correspondence π−1 i.e.
σ : π[D] → D,
σ ⊂ π−1 .
σ is a residual map because for any residual set R ⊂ D we have
σ−1 [R] ⊃ σ−1 [(ιR , VR )M ] = ιMR ,
so σ−1 [R] is residual in π[D] and hence σ is residual map. Now it suffices to put s = t ◦ σ to obtain
a subset of t which consequently converges to x0 and has the property that
∀ι ι0 : s(ι) ∈ Aι .
Remark 4.16. We can formulate the characterization of lower and upper closed limits in the more
convenient way:
x0 ∈ LiAι
if there exists a residual selection net (xι ∈ Aι )ιι0 → x0 ,
x0 ∈ LsAι
iff there exists a cofinal selection net (xι ∈ Aι )ι∈K → x0 .
THEOREM 4.17. The multifunction F : X −−≺ Y is lower semicontinuous at a point x0 ∈ X iff for
each net (xι ∈ X)ι∈I convergent to x0 we have
F(x0 ) ⊂ LiF(xι ).
Proof. (⇒) Let y ∈ F(x0 ) and V be a neighbourhood of y. Then F −1 [V] is a neighbourhood of x0
and so
∃ι0 ∈ I ∀ι ι0 : xι ∈ F −1 [V],
which gives
V ∩ F(xι ) , ∅
(∀ι ι0 ),
but it means that y ∈ LiF(xι ).
(⇐) If F were not lower semicontinuous at x0 then there exist y ∈ F(x0 ) and a neighbourhood V
of y such that F −1 [V] is not a neighbourhood of x0 . Therefore for each neighbourhood U ∈ N(x0 )
we have U 1 F −1 [V] i.e.
U ∩ (X \ F −1 [V]) , ∅,
63
4.1 Lower and upper semicontinuity
64
and hence we can choose xU ∈ U with
F(xU ) ⊂ Y \ V.
If we consider the directed set (N(x0 ), ⊂) we have constructed the net
(xU : U ∈ N(x0 )) → x0 ,
with y < LiF(xU ). Hence F(x0 ) 1 LiF(xU ) which contradicts the assumption.
Corollary 4.18. The multifunction F : X −−≺ Y is lower semicontinuous at x0 ∈ X iff for each net
(xι )ι∈I → x0 and each y ∈ F(x0 ) there exists ι0 ∈ I and a net (yι ∈ F(xι ))ιι0 → y.
Proof. It is a direct consequence of the previous theorem and the following characterization of
limit points of any net of sets (Aι )ι∈I .
In the case of metrizable spaces X, Y we obtain from Corollary 4.18 the following characterization of the lower semicontinuity which in many texts is taken as a definition of the lower
semicontinuity.
THEOREM 4.19. Let X, Y be metrizable spaces. A multifunction F : X −−≺ Y is lower semicontinuous at a point x0 ∈ X iff for any sequence (xn )n≥1 → x0 and for any y ∈ F(x0 ) there exist n0 ∈ N
and a sequence (yn ∈ F(xn ))n≥n0 converging to y. If F is a correspondence, i.e. ∀x ∈ X : F(x) , ∅,
then we can put n0 = 1.
Now we proceed to the characterization of the upper semicontinuity by using nets convergence.
From Theorem 4.15 one could think that upper semicontinuity of a multifunction F at a point x0
could be characterized by the dual notion to the lower closed limit namely by the upper closed
limit: if xi → x0 then F(x0 ) ⊃ Lsi∈N F(xi ). But this intuitive impression is false! Such assertion
gives a new type of semicontinuity which is called outer semicontinuity which, in general, is different from both lower and upper semicontinuity and especially is equivalent with closedness of
the graph of the multifunction. We will study it in the next section.
Next theorem gives a net characterization of the local upper semicontinuity.
THEOREM 4.20. A multifunction F : X −−≺ Y is upper semicontinuous at a point x0 ∈ X iff for
any net (xι : ι ∈ I) in X which converges to x0 , and every open set V in Y with F(x0 ) ⊂ V, F(xi ) ⊂ V
for sufficiently large ι. It is equivalent with the convergence F(xι ) → F(x0 ) in the upper topology
τu on P(Y).
Proof. (⇒) To prove the "only if" part of the theorem suppose (xι : ι ∈ I) → x0 . Then for every
open V ⊃ F(x0 ), F + [V] is a neighbourhood of x0 and sι ∈ F + [V] for sufficiently large ι ι0 .
Consequently, F(xι ) ⊂ V for all ι ι0 .
64
4.2 Outer semicontinuity
65
(⇐) To prove the "if" part of the theorem let us suppose F were not u.s.c. at x0 . Then there exists
an open set V ⊃ F(x0 ) such that F + [V] is not a neighbourhood of x0 . It can happen only if for each
neighbourhood U ∈ N(x0 ) there is xU ∈ U such that
F(xU ) ∩ (Y \ V) , ∅.
(♠)
When considering the neighbourhood family N(x0 ) directed by the inclusion ⊂ we have constructed a net (xU : U ∈ N(x0 )) converging to x0 and using the assumption of the "if" part
we get
∃U0 ∈ N(x0 ) ∀U ⊂ U0 : F(xU ) ⊂ V,
but this is a contradiction with (♠).
4.2 Outer semicontinuity
We have seen that upper semicontinuity is not quite a dual notion to lower semicontinuity, if using
characterization of these notions by nets convergence. Outer semicontinuity is such a notion whose
global version amounts to a closed graph when the target space is Hausdorff. We start with the local
definition described in terms of an upper closed limit.
Definition 4.21. A multifunction F : X −−≺ Y is outer semicontinuous (o.s.c) at a point x0 ∈ X
provided whenever (xι : ι ∈ I) is a net in X convergent to x0 then the net (F(xι ) : ι ∈ I) of subsets
of Y cofinaly converges to F(x0 ), i.e.
Lsι∈I F(xι ) ⊂ F(x0 ).
We give first three examples which shows that this notion is independent of both lower and
upper semicontinuity notions.
Example 4.22. (a) The multifunction F1 : [0, 1] −−≺ [0, 1] defined by
2x , if 0 ≤ x ≤ 12
F1 (x) :=
x + 1 , if 1 ≤ x ≤ 1
2
2
2
is outer semicontinuous and upper semicontinuous at x0 = 1/2 but is not lower semicontinuous at
x0 .
(b) The multifunction F2 : [0, 1] −−≺ R2 defined by
F2 (x) := {x} × R
is lower semicontinuous and outer semicontinuous at each point but is not upper semicontinuous
at any point.
(c) If
B := {(x, y) ∈ R2 : x2 + y2 < 1}
65
4.2 Outer semicontinuity
66
is the open unit ball in the plane then the constant multifunction
F3 : [0, 1] −−≺ [0, 1]2 ,
defined by
F3 (x) := B
is lower and upper semicontinuous but is not outer semicontinuous at any point.
Under some additional assumptions the outer semicontinuity is quite close to the upper semicontinuity. First we give some equivalent presentations of the local outer semicontinuity.
THEOREM 4.23. For any multifunction F : X −−≺ Y the following statements are equivalent
(i) F is outer semicontinuous at x0 ∈ X,
(ii) For each net (xι ) → x0 and each selection net (yι ∈ F(xι )) → y0 we have y0 ∈ F(x0 ),
(iii) F(x0 ) =
T
{F[U] | U ∈ N(x0 )} ,
(iv) For each y0 ∈ Y \ F(x0 ) there exist (open) neighbourhoods V 3 y0 and U 3 x0 such that
F[U] ∩ V = ∅.
Proof. (i) ⇒ (ii): Let (xι ) → x0 and consider any convergent selection net (yι ∈ F(xι )) → y0 ∈ Y.
(it exists if xι ∈ DomF, ∀ι ∈ I, and it is always the case if F is a correspondence). Then y0 ∈
LiF(xι ) ⊂ LsF(xι ) and the assumption (i) gives LsF(xι ) ⊂ F(x0 ) therefore y0 ∈ F(x0 ).
(ii) ⇒ (i): Let us suppose the negation of (i) would hold. It means that there exists a convergent
net (xι : ι ∈ I) → x0 such that LsF(xι ) 1 F(x0 ). Then
∃y0 ∈ LsF(xι ) \ F(x0 ),
(?)
but y0 ∈ LsF(xι ) ⇒ ∃ cofinal K ⊂ I ∃(yι ∈ F(xι ))ι∈K → y0 . The cofinal subnet (xι : ι ∈ K) also
converges to x0 and using the assumption (ii) we must have y0 ∈ F(x0 ) which contradicts (?).
(ii) ⇒ (iii): Each neighbourhood U ∈ N(x0 ) contains x0 so the following inclusions hold true
F(x0 ) ⊂ ∩{F[U] : U ∈ N(x0 )} ⊂ ∩{F[U] : U ∈ N(x0 )}.
To prove the opposite inclusion let y ∈ ∩{F[U] : U ∈ N(x0 )}. We construct convergent nets
xι → x0 and yι → y with yι ∈ F(xι ) for all ι ∈ I in the following way. For any U ∈ N(x0 ) we have
y ∈ F[U] hence for any neighbourhood of y we have
V ∩ F[U] , ∅,
66
4.2 Outer semicontinuity
67
and using the axiom of choice we can choose
yU,V ∈ V ∩ F[U],
and the corresponding xU,V ∈ U with yU,V ∈ F(xU,V ). The Cartesian product N(x0 ) × N(y) =: I is
directed by the product order
(U 0 , V 0 ) (U, V)
⇔
U 0 ⊂ U & V 0 ⊂ V.
It is easy to see that
(xU,V : (U, V) ∈ I) → x0 ,
(yU,V : (U, V) ∈ I) → y.
Using the assumption (ii) we get y ∈ F(x0 ) so the opposite inclusion to (?) follows.
(iii) ⇒ (ii): Let
(xι : ι ∈ I) =: x → x0
and
(yι ∈ F(xι ) : ι ∈ I) =: y → y0 .
To prove that y0 ∈ F(x0 ) it suffices to prove that each neighbourhood V of y0 meets F[U] for every
neighbourhood U of x0 . From the convergence of x and y we have that the sets R := x−1 [U] and
S := y−1 [V] are residual in I so R ∩ S , ∅ and for each ι ∈ R ∩ S we have
∅ , V ∩ F(xι ) ⊂ V ∩ F[U],
and the conclusion follows.
(iii) ⇔ (iv): It is obvious because the condition in (iv) is just another formulation of the implication
y < F(x0 ) ⇒ y < ∩{F[U] : U ∈ N(x0 )},
obviously equivalent with
∩{F[U] : U ∈ N(x0 )} ⊂ F(x0 ),
which is equivalent with (iii).
Corollary 4.24. If F : X −−≺ Y is outer semicontinuous at x0 then F(x0 ) is a closed subset in Y.
The global notion of the outer semicontinuity of a multifunction F : X −−≺ Y is defined as
usually requiring F to be outer semicontinuous at any point of its domain DomF, i.e. F : X −−≺ Y
is an outer semicontinuous multifunction if for each x ∈ DomF and each net (xι , yι ) ∈ GrF
converging to a point (x, y) in the product space X × Y we have
(x, y) ∈ GrF,
in other words GrF is a closed set in DomF × RngF.
A direct consequence of this notion of the outer semicontinuity is the following
67
4.2 Outer semicontinuity
68
Proposition 4.25. The multifunction F is outer semicontinuous iff its inverse F −1 is o.s.c.
A multifunction with a closed graph need not be upper semicontinuous. Example 4.21 shows
that also the converse need not be true. But under some mild conditions upper semicontinuity for
multifunctions having closed values gives outer semicontinuity.
THEOREM 4.26. Let X and Y be Hausdorff spaces and multifunction F : X −−≺ Y be u.s.c. at
x0 ∈ X and F(x0 ) be closed. Then
(i) if Y is regular then F is o.s.c. at x0 ,
(ii) if both X and Y are first countable then F is o.s.c. at x0 .
Proof. For (i), let y ∈ Y \ F(x0 ) be arbitrary and by regularity let B be a closed neighbourhood of
y disjoint from F(x0 ). By upper semicontinuity, there is a neighbourhood U of x0 with F[U] ⊂ Bc .
As a result, F[U] ∩ Bc = ∅, so by Theorem 4.23 (iv), F is o.s.c. at x0 .
For (ii), suppose F is not o.s.c. at x0 . Then there exists y0 ∈ F(x0 )c such that each neighbourhood
of y0 hits F[U] for each U ∈ N(x0 ). Let {Un : n ∈ N} and {Vn : n ∈ N} be countable local bases
at x0 and y0 , respectively, where for each n, Un ⊃ Un+1 , Vn ⊃ Vn+1 , and Vn ∩ F(x0 ) = ∅. Choose
for each n ∈ N a point xn ∈ Un for which F(xn ) ∩ Vn , ∅, and then choose yn ∈ F(xn ) ∩ Vn .
Let B := {yn : n ∈ N}c , which by the convergence of yn → y0 is an open subset of Y. We have
F(x0 ) ⊂ B whereas for each n, F(xn ) 1 B. This violates u.s.c. of F at x0 .
Outer semicontinuity gives upper semicontinuity with sufficient compactness.
THEOREM 4.27. Let X, Y be Hausdorff spaces. If F : X −−≺ Y is o.s.c. at x0 and there exists a
neighbourhood U0 of x0 with clF[U0 ] compact, then F is u.s.c. at x0 .
Proof. Let K := clF(x0 ) and let V be an open neighbourhood of F(x0 ). If V contains K, then
F[U0 ] ⊂ V and we are done. Otherwise, set K 0 = K \ V, a nonempty compact set. By outer
semicontinuity, for each y ∈ K 0 there exist neighbourhoods Uy of x0 and Vy of y such that F[Uy ] ∩
Vy = ∅. Choose by compactness {y1 , y2 , . . . , yn } ⊂ K 0 such that K 0 ⊂ ∪ni=1 Vyi . Then F maps the
neighbourhood U0 ∩ Uy1 ∩ · · · ∩ Uyn into V, and so F is u.s.c. at x0 .
From the above two theorems we can see that globally outer semicontinuous multifunctions
are pretty close to globally upper semicontinuous multifunctions with nonempty compact values
and it is common to call the latter usco maps.
The other types of continuities of multifunctions are defined by means of semicontinuous
single-valued functions so we are going to study such functions in the next section.
68
4.3 Semicontinuous functions
69
4.3 Semicontinuous functions
Semicontinuous functions were introduced at the beginning of 20th century by Baire. They share
many good properties of continuous functions and behave more friendly with respect to some limit
operations and play an important role in optimization. So historically the notion of semicontinuity
for functions precedes the similar one for multifunctions and it is not identical with it despite the
same name.
We start with reminding you of a basic characterization of a continuous real function f defined
on a topological space X. Such a function is continuous iff for each a ∈ R the sets
{x ∈ X | f (x) > a}
(l)
{x ∈ X | f (x) < a}
(u)
are open in X. It is due to the fact that the unbounded intervals (a, +∞) and (−∞, a), (a ∈ R) form
a subbase of the Euclidean topology on R. If only one of the conditions (l) or (u) is satisfied, we
arrive at the notion of semicontinuous functions.
Semicontinuous functions behave well with respect to taking infima and suprema but these
operations often result in infinite values. So we will introduce semicontinuity for extended realvalued functions, i.e. functions taking values in the extended real line R̂ := [−∞, +∞] considered
with the natural linear order. Instead of topology induced by this linear order we will consider two
coarser topologies on R̂ namely the lower topology:
τl := {(a, +∞] | a ∈ R̂} ∪ {R̂},
and the upper topology
τu := {[−∞, a) | a ∈ R̂} ∪ {R̂}.
Unfortunately, these topologies are not Hausdorff (i.e. they do not separate points) but satisfy T 0
separation axiom, i.e. for each two distinct points a , b ∈ R̂ there exists an open set containing one
of them and not containing the other one. The union τl ∪ τu is a subbase of the usual order topology
τo on R̂ which is obviously Hausdorff. Now we can introduce the local version of semicontinuity
of extended real-valued functions.
Definition 4.28. Let X be a topological space. A function f : X → R̂ is called lower [upper]
semicontinuous at a point x0 ∈ X, abbreviated l.s.c. at x0 or just f is lsc(x0 ), if for each a ∈ R with
f (x0 ) > a [ f (x0 ) < a] there exists a neighbourhood U of x0 such that the following implication
holds true
x ∈ U ⇒ f (x) > a,
(l)
x ∈ U ⇒ f (x) < a .
(u)
69
4.3 Semicontinuous functions
70
We say that f is lower [upper] semicontinuous on a set M ⊂ X if it is such at each point of the set
M. We say that f is lower [upper] semicontinuous, abbreviated l.s.c. [u.s.c.] if it is such at every
point of its domain X.
We can express the implications (l) and (u) in the equivalent way, namely for each a < f (x0 )
[a > f (x0 )] the set f −1 [(a, +∞]] [ f −1 [[−∞, a)]]] is a neighbourhood of x0 .
Example 4.29.
(a) The function f : R → R̂ defined by
(
−1 if x ≤ 0,
f (x) =
1 if x > 0,
is l.s.c. but is not u.s.c. at x = 0.
(b) The function g : R → R̂ defined by
(
g(x) =
−1 if x < 0,
1 if x ≥ 0,
is u.s.c. but is not l.s.c. at x0 = 0.
The following proposition shows that semicontinuity is closely related to local extrema.
Proposition 4.30. Let f : X → R̂ has a local minimum [maximum] at a point x0 ∈ X. Then f is
lower [upper] semicontinuous at x0 . Consequently, if f (x0 ) = −∞ [ f (x0 ) = +∞] then f is lower
[upper] semicontinuous at x0 .
Proof. If f has a local minimum at x0 then there exists a neighbourhood U of x0 satisfying the
implication
x ∈ U ⇒ f (x) ≥ f (x0 ).
So for each a < f (x0 ) we have
x∈U
⇒
f (x) > a,
which is the defining implication of the lower semicontinuity at x0 . A similar proof is valid for the
upper semicontinuity.
There are number of simple characterizations of semicontinuous functions. The following
proposition summarizes some basic characterizations of globally semicontinuous functions but the
appropriate localization of these properties is also valid. We leave the proof of the properties for
an exercise.
Proposition 4.31. For any function f : X → R̂ the following assertions hold true
(i) f is l.s.c. ⇔ − f is u.s.c.
70
4.3 Semicontinuous functions
71
(ii) f is l.s.c. ⇔ f is continuous with respect to the lower τl topology on R̂, i.e. ∀a ∈ R :
f −1 [(a, +∞]] is open in X
(iii) f is u.s.c. ⇔ f is continuous with respect to the upper τu topology on R̂, i.e. ∀a ∈ R :
f −1 [[−∞, a)] is open in X
(iv) f is l.s.c. ⇔ ∀a ∈ R : f −1 [[−∞, a]] is closed in X, the set f −1 [[−∞, a]] is called a sublevel
set for f at height a and is denoted slv( f, a)
(v) f is u.s.c. ⇔ ∀a ∈ R : f −1 [[a, +∞]] is closed in X, the set f −1 [[−∞, a]] is called an upper
level set for f at height a
(vi) f is l.s.c. and u.s.c. ⇔ f is continuous with respect to the order topology τo on R̂ with a
subbase τl ∪ τu
Because of the assertion 4.31(i) we can focus on lower semicontinuous functions and by dualisation of our results we obtain valid properties for upper semicontinuous functions.
Very convenient visualization of semicontinuous functions is by means of an epigraph or a
hypograph.
Definition 4.32. For any extended real-valued function f : X → R̂ the epigraph of f [hypograph
of f ] is defined by
epi f := {(x, λ) ∈ X × R | λ ≥ f (x)},
hypo f := {(x, λ) ∈ X × R | λ ≤ f (x)} ,
and it is a subset of X × R (not X × R̂).
The epigraph and hypograph of a simple discontinuous function are illustrated in Figure 4.3.
hypof
y = f (x)
epif
Figure 4.3: Graphic representation of the graph, epigraph and hypograph of the function f .
It is evident that a subset E ⊂ X × R is an epigraph of a function iff:
(i) E recedes in the vertical direction: (x, α) ∈ E, α < β ∈ R ⇒ (x, β) ∈ E
71
4.3 Semicontinuous functions
72
(ii) E is vertically closed: for each x ∈ X, {α ∈ R | (x, α) ∈ E} is closed.
Now we can prove the following characterization of globally semicontinuous functions.
Proposition 4.33. The function f : X → R̂ is
(i) l.s.c. ⇔ epi f is a closed subset of X × R,
(ii) u.s.c. ⇔ hypo f is a closed subset of X × R.
Proof. We prove (i) and (ii) can be proved when passing to − f .
” ⇒ ” If epi f is a closed subset of X ×R then the sublevel set for f at height a ∈ R is the projection
on the space X:
f −1 [[−∞, a]] = prX [epi f ∩ X × {a}].
Since X × {a} is closed in X × R and the projection prX : (x, a) 7→ x maps a closed set on a closed
set, f is l.s.c. because of 4.31(iv).
” ⇐ ” Suppose (xι , αι )ι∈I is a net in epi f convergent to (x, α) ∈ X × R in the product topology. To
show (x, α) belongs to epi f , we must show α ≥ f (x). If f (x) = −∞ the claim is obviously valid.
Otherwise, take β < f (x) and then by lower semicontinuity of f at x there exists a neighbourhood
U of x such that for each y ∈ U we have β < f (y). In particular, β < f (xι ) for ι sufficiently large.
Since f (xι ) ≤ αι we have for each β < f (x):
β ≤ lim inf f (xι ) ≤ lim αι = α,
ι∈I
ι∈I
hence f (x) ≤ α, completing the proof of the assertion (i).
From the previous Proposition it is clear that the discontinuous function illustrated in Figure
4.3 is neither l.s.c. nor u.s.c. Next Proposition gives the characterization of local semicontinuity of
functions.
Proposition 4.34. Let f : X → R̂ and x0 ∈ X. Then
(i) f is lsc(x0 ) ⇔ for each net (xι )ι∈I → x0 in X then
lim inf f (xι ) ≥ f (x0 ),
ι∈I
(ii) f is usc(x0 ) ⇔ whenever xι → x0 in X then
lim sup f (xι ) ≤ f (x0 ).
ι∈I
72
4.3 Semicontinuous functions
73
Proof. We prove (ii), the proof of (i) being similar.
” ⇒ ” If f (x0 ) = +∞ the claim is obviously valid. Let f (x0 ) < +∞. Then
∀b > f (x0 )∃U ∈ N(x0 ) ∀x ∈ U : b > f (x).
To prove the demanded inequality we use the definition of limes superior of a net
lim sup f (xι ) := Infλ∈I Supιλ f (xι ) = Infλ∈I bλ ,
ι∈I
where
bλ := Supιλ f (xι ),
for each λ ∈ I. So for λ ι0 we have bλ ≤ b and therefore
Infλ∈I bλ ≤ Infλι0 bλ ≤ b.
Hence lim supι∈I f (xι ) ≤ b is true for any b > f (x0 ) and consequently
lim sup f (xι ) ≤ f (x0 ).
ι∈I
” ⇐ ” Suppose f were not usc(x0 ). It means
∃b > f (x0 )∀U ∈ N(x0 )∃xU ∈ U : b ≤ f (xU ).
The neighbourhood system N(x0 ) is upper (left) directed by the inclusion ⊂ and it is obvious that
the net
(xU | U ∈ N(x0 )) → x0 .
Then we compute
b > f (x0 ) ≥ lim sup f (xU ) = InfU∈N(x0 ) SupV⊂U f (xV ) ≥ b.
U∈N(x0 )
This contradiction shows that f is usc(x0 ).
The following one is a closely related characterization of the local semicontinuity.
Proposition 4.35. For any function f : X → R̂ and x0 ∈ X the following assertions are true:
(i) f is lsc(x0 ) ⇔ lim inf x→x0 f (x) = f (x0 ),
(ii) f is usc(x0 ) ⇔ lim sup x→x0 f (x) = f (x0 ) .
73
4.3 Semicontinuous functions
74
Proof. We show the validity of (i) leaving the proof of (ii) as an exercise. First we remind the
definition of limes inferior of a function defined on a topological space X with values in R̂. We
consider the neighbourhood system N(x0 ) upper (left) directed by inclusion ⊂. For each N ∈ N(x0 )
there exists
Inf f [N] =: aN ∈ R̂.
The net (aN : N ∈ N(x0 ), ⊂) is non-decreasing (weakly increasing) so there exists its limit in R̂ and
we have:
lim aN = SupN∈N(x0 ) aN ,
N∈N(x0 )
and we put
lim inf := lim (Inf x∈N f (x)) = SupN∈N(x0 ) (Inf f [N]) .
x→x0
N∈N(x0 )
” ⇒ ”
∀a < f (x0 )∃U ∈ N(x0 )∀x ∈ U : a < f (x).
So a ≤ Inf f [U] and also ∀N ⊂ U : a ≤ Inf f [N], and hence
lim inf f (x) := SupN∈N(x0 ) aN ≥ SupN⊂U aN ≥ a.
x→x0
So
lim inf f (x) ≥ a
x→x0
for every a < f (x0 ) and therefore
lim inf f (x) ≥ f (x0 ).
x→x0
The opposite inequality is also true since for each N ∈ N(x0 ) it is x0 ∈ N, so f (x0 ) ≥ aN and hence
f (x0 ) ≥ SupN∈N(x0 ) aN = lim inf f (x).
x→x0
” ⇐ ” If a < f (x0 ) = SupN∈N(x0 ) aN , then a is an upper bound, so
∃N ∈ N(x0 ) : a < aN := Inf f [N],
and hence
∀x ∈ N : a < f (x).
Proposition 4.36. For any function f : X → R̂ the function defined on X by
"
#
φ : x 7→ lim inf f (y)
ψ : x 7→ lim sup f (y)
y→x
y→x
is l.s.c. [u.s.c.].
74
4.3 Semicontinuous functions
75
Proof. For any x0 ∈ X and any a < φ(x0 ) := Sup(Inf f [N x0 ]) there exists a neighbourhood U0 of x0
with
a < Inf f [U0 ].
Let us consider x ∈ U0 and all N x ⊂ U0 . Then a < Inf f [U0 ] ≤ Inf f [N x ]. Hence for all N x ⊂ U0 we
have
a < Inf f [U0 ] ≤ SupNx ⊂U0 (Inf) f [N x ] ≤ SupNx (Inf f [N x ]) = φ(x)
for all x ∈ U0 and l.s.c. of φ at x0 follows.
Before considering the preservation of the semicontinuity by some algebraic operations we
summarize the properties of arithmetic operations extended from R to R̂ in a usual way. In the
following formulae the symbol ∞ will denote one of the improper real numbers −∞ or +∞, and
−∞ is the opposite element to ∞. For any (finite) real number x ∈ R we put
x + ∞ = ∞ + x = ∞,
x − ∞ = −∞,
∞ + ∞ = ∞, ∞ − ∞ is undefined
x > 0 ⇒ x · ∞ = ∞ = ∞ · x, (−x) · ∞ = −∞ = ∞ · (−x),
∞
1
x
0 · ∞, ∞ · 0 are undefined,
x,0 ⇒
:= · ∞,
= 0,
x
x
∞
∞ ∞ ±∞
,
,
are undefined
0 ±∞ ∞
A consequence of these properties is that R̂X is not a vector space (over R) so we must be
careful in performing some operations with extended real-valued functions. If f : D f → R̂ and
g : Dg → R̂ then
f + g : D f +g → R̂,
with
D f +g = {x ∈ D f ∩ Dg | { f (x), g(x)} , {−∞, ∞}}.
Similarly, for f − g, f · g, f /g. So in the sequel, we will speak about the semicontinuity of
functions defined only on a subset D of a topological space (X, τ). In that case the induced topology
τ|D := {O∩ D | O ∈ τ} is understood on D. With this in mind we can now formulate semicontinuity
properties of functions resulting from algebraic operations with semicontinuous functions. The
proof of the following theorem is straightforward and it is asked to be done in an exercise.
THEOREM 4.37. Let f : D f → R̂ and g : Dg → R̂ be lsc(x0 ). If x0 is in the domain of the
function resulting from respective operations below, the following is true:
(i) f + g is lsc(x0 ),
− f is usc(x0 ),
(ii) c ≥ 0 ⇒ c f is lsc(x0 ),
c ≤ 0 ⇒ c f is usc(x0 ) ,
(iii) f ≥ 0, g ≥ 0 ⇒ f g is lsc(x0 ),
75
4.3 Semicontinuous functions
76
(iv)
f ≥0 ⇒
1
1
is usc(x0 ) if we put = +∞,
f
0
f ≤0 ⇒
1
1
is usc(x0 ) if we put = −∞.
f
0
Proof. Exercise.
The following theorem generalizes the important Weierstrass theorem about the maximum and
the minimum of the continuous function on a compact set.
THEOREM 4.38. Let X be a Hausdorff space and let f : X → (−∞, +∞] =: R̀ be lower
semicontinuous. Suppose that for some a ∈ R the sublevel set for f at height a {x ∈ X | f (x) ≤
a} =: slv( f ; a) is compact and nonempty. Then f has a minimum value, i.e.
∃x0 ∈ X : Inf x∈X f (x) = f (x0 ).
Proof. Evidently,
Inf x∈X f (x) = Inf f (x)≤a f (x) = Inf( f −1 [(−∞, a]]).
By the semicontinuity of f , for each x ∈ X with f (x) < +∞ there exists a neighbourhood V x of x
such that for each y ∈ V x we have
f (y) > f (x) − 1.
By the compactness of f −1 [(−∞, a]] we can find a finite subset {x1 , x2 , . . . , xn } of the sublevel set
such that
Inf{ f (x) | f (x) ≤ a} ≥ Infi≤n f (xi ) − 1 ∈ R.
This shows that f is bounded below. So there exists
µ := Inf f (x) ∈ R.
For each n ∈ N, choose xn ∈ slv( f ; a) with f (xn ) ≤ min{a, µ+1/n}. By the compactness of slv( f ; a)
the sequence (xn ) has a cluster point x0 . For each n ∈ N , {xk | k ≥ n} ⊂ slv( f ; µ + 1/n) and by the
lower semicontinuity of f sublevel sets are closed so x0 ∈ slv( f ; µ + 1/n). This gives
f (x0 ) ≤ µ +
1
n
for each natural number n and consequently f (x0 ) ≤ µ. It follows f (x0 ) = µ, completing the proof
of the theorem.
Corollary 4.39. The lower [upper] semicontinuous finite-valued function f on a compact Hausdorff space X takes its infimum [supremum] in R and consequently is bounded below [above] on
X.
76
4.3 Semicontinuous functions
77
Now we study two important operations on families of semicontinuous functions, infimum and
supremum. Given a family of functions
( fi : X → R̂)i∈I
we define the infimum of the family by
(inf fi )(x) := Inf{ fi (x) | i ∈ I},
i∈I
and the supremum of the family by
(sup fi )(x) := Sup{ fi (x) | i ∈ I},
i∈I
for each x ∈ X.
Proposition 4.40. If each function fi : X → R̂ is lower [upper] semicontinuous (at x0 ∈ X) then
sup fi =: g
inf fi =: f
i∈I
i∈I
is lower [upper] semicontinuous (at x0 ).
Proof. For arbitrary x0 ∈ X and a ∈ R, if
a < sup fi (x0 ) = g(x),
i∈I
then there exists i0 ∈ I such that
a < fi0 (x0 ) ≤ g(x0 ).
Since fi0 is lsc(x0 ) there exists a neighbourhood U of x0 such that
x ∈ U ⇒ a < fi0 (x0 ) ≤ g(x),
hence g is lsc(x0 ). Similarly, we could prove the u.s.c. of f at any point x0 ∈ X.
The functions f or g from Proposition 4.40 need not be l.s.c. (u.s.c.), see Exercises. But for a
finite family it is true.
Proposition 4.41. If ( f1 , f2 , . . . , fn ) is a finite family of l.s.c. [u.s.c.] functions then
inf( f1 , . . . , fn ) =: f
is l.s.c. [u.s.c.] function.
77
sup( f1 , . . . , fn ) =: g
4.4 Hemicontinuities for multifunctions
78
Proof. For each x0 ∈ X and a ∈ R if
a < inf{ f1 (x0 ), . . . , fn (x0 )} = f (x0 )
then
∀i ≤ n : a < fi (x0 ).
Each fi is lsc(x0 ) so there exist neighbourhoods Ui of x0 verifying
x ∈ Ui ⇒ a < fi (x)
(i = 1, 2, . . . , n).
Therefore for the neighbourhood U := U1 ∩ U2 ∩ · · · ∩ Un of x0 we have
x ∈ U ⇒ a < fix (x) := inf( f1 (x), . . . , fn (x)) = f (x),
and l.s.c. of f follows. Similarly, we can prove u.s.c. of g.
Corollary 4.42. (a) If fi : X → R̂, (i ∈ I) are continuous functions then supi fi is l.s.c. and
inf i fi is u.s.c.
(b) If fn ≤ fn+1 , (n = 1, 2, . . . ) is an increasing sequence of l.s.c. functions then the pointwise
limit
f := lim fn : x 7→ lim fn (x) ∈ R̂
n→∞
n→∞
is l.s.c.
(c) Given any (extended) real function from X, there is a largest [least] l.s.c. [u.s.c.] function
majorised [minorised] by f , namely
h
i
f := sup{h ∈ R̂X | h ≤ f }
f := inf{h ∈ R̂X | f ≤ h} ,
i.e.
f ≤ f ≤ f.
f [ f ] is called a lower [upper] envelope of f .
4.4 Hemicontinuities for multifunctions
If the target space Y of a multifunction F : X −−≺ Y has richer structure than the topological one, we
can define some more types of "continuity" of multifunctions using special features of the target
space.
Let us suppose (Y, d) be a metric space. On the power set P(Y) we can define an upper hemimetric
topology τh whose local neighbourhood base at an element A ∈ P(Y) consists of sets
τh (A) := {B ∈ P(Y) | e(B, A) < , ∈ (0, +∞]}
78
4.4 Hemicontinuities for multifunctions
79
where e(B, A) := Sup{d(x, A) : x ∈ B} is the excess of the set B over the set A. We adopt the
convention that if A , ∅, then e(∅, A) = 0. The excess functional e is not symmetric. For example,
on the real line with the usual metric e([0, 4], [5, 6]) = 4 and e([5, 6], [0, 4]) = 2. So it makes
sense to define on P(Y) the lower hemimetric topology τh with a local neighbourhood base at any
element A ∈ P(Y) given by
τh (A) := {B ∈ P(Y) | e(A, B) < , > 0}.
Definition 4.43. Let X be a topological space and (Y, d) be a metric space. The multifunction
F : X −−≺ Y is lower [upper] hemicontinuous if the associated set-valued function F̂ : X → P(Y)
is continuous with respect to the lower [upper] hemimetric topology τh [τh ] on the power set P(Y).
The next theorem gives the relationships of the semicontinuity of multifunctions.
THEOREM 4.44. Let X be a topological space and Y a metric space and let F be a correspondence from X to Y.
(i) If F is u.s.c., then F is upper hemicontinuous.
(ii) If F is lower hemicontinuous, then F is l.s.c.
In both cases, the converse is not necessarily true.
Proof. Both claims are a consequence of the relationships between upper or lower hemimetric
topology and the upper (U) or lower (L) topology on P(Y), namely
τh ⊂ U
or
τh ⊃ L.
The following examples show that the converse implications need not be true.
Example 4.45. (a) Let X and Y both be the real line R with the usual topology. Consider the
correspondence F : R −−≺ R, F(x) := (x − 1, x + 1). Then it is clear that
|x1 − x2 | < ⇒ e(F(x1 ), F(x2 )) < so F is upper hemicontinuous. On the other hand, F + [(−1, 1)] = {x ∈ R : (x − 1, x + 1) ⊂
(−1, 1)} = {0} which is not an open subset of R and hence F is not upper semicontinuous.
(b) Let X = {0, 1, 21 , . . . , 1n , . . .} and Y = R, both with the usual topology. Let F : X −−≺ R be
defined by
!
1
F
= {0, 1, 2, . . . , n}
n
F(0) = N
79
4.4 Hemicontinuities for multifunctions
80
Then F is l.s.c. since any open set G ⊂ R which intersects N also intersects F(1/n) for all
sufficiently large n. However, F is not lower hemicontinuous at 0 since
!!
1
e F(0), F
= +∞
n
for all values of n.
Under some additional conditions, semicontinuity and hemicontinuity are equivalent.
THEOREM 4.46. Let X be a topological space and Y a metric space and F : X −−≺ Y.
(i) If F is upper hemicontinuous and F(x) is compact for each x ∈ X, then F is upper semicontinuous.
(ii) If F is l.s.c. and F(x) is totally bounded for each x ∈ X, then F is lower hemicontinuous.
Proof. (i) It is a consequence of the fact that the upper hemimetric topology coincides on
the family K(Y) of all compact sets in Y with the trace of the upper topology on K(Y).
(ii) It is true because on totally bounded sets the lower hemimetric topology coincides with
the lower topology inherited from P(Y).
We remark here that if F is a function, then F(x) is a singleton and hence is compact so that all
these notions of continuity coincide for functions. But outer semicontinuity is still different even
for functions since being equivalent to closed graph, such a function need not be continuous.
Another type of hemicontinuity is defined for multifunctions with values in a normed linear
space (Y, k· , ·k). First we define a support function. For any linear functional p ∈ Y ∗ and a set
C ⊂ Y we define
σ(p, C) := Sup p[C]
and the extended real-valued function
σ(· , C) : Y ∗ → [−∞, ∞]
is called a support function of the set C. A convex closed set can be represented by its support
function since y ∈ C iff p(y) ≤ σ(p, C) for all p ∈ Y ∗ . Obviously σ(p, C) = −∞ iff C = ∅.
Definition 4.47. Let X be a topological space and Y a real normed linear space. We shall say that
the multifunction F : X −−≺ Y is (scalarwise) upper hemicontinuous at a point x0 ∈ X if for all
p ∈ Y the extended real-valued function
X 3 x 7→ σ(p, F(x)) ∈ R̂,
is upper semicontinuous at x0 . It is upper hemicontinuous (abbreviated u.h.c.) if it is u.h.c. at all
points x0 ∈ X.
80
4.4 Hemicontinuities for multifunctions
81
Remark 4.48. (1) It is not common to define a scalary lower hemicontinuous function even though
formally it would be possible demanding the lower semicontinuity of a convenient real-valued
function.
(2) We use the adjective "scalary" just to distinguish this type of the continuity of multifunctions
from the hemicontinuity defined earlier using Hausdorff hemimetric. Often it is called just an
upper hemicontinuous multifunction what we will adopt in this section.
First we indicate the link between upper hemicontinuous and upper semicontinuous multifunctions.
Proposition 4.49. Any multifunction upper semicontinuous (at x0 ) is upper hemicontinuous (at
x0 ).
Proof. For fixed > 0 and p ∈ Y ∗ , there exists a neighbourhood N(x0 ) such that
∀x ∈ N(x0 ) : F(x) ⊂ F(x0 ) + B
where B is an open unit ball in the target space Y of F.
Then also ∀x ∈ N(x0 ) we have
σ(p, F(x)) ≤ σ(p, F(x0 )) + kpk
since σ(p, B) = kpk. Since can be chosen arbitrarily small, F is hemicontinuous at x0 .
Upper hemicontinuity is weaker than upper semicontinuity but often it is sufficient to ensure
the closedness of the graph.
Proposition 4.50. The graph of an upper hemicontinuous multifunction with convex closed values
is closed.
Proof. Consider a net (xι , yι ) ∈ Gr(F), (ι ∈ I) converging to the pair (x, y). Since the functions
x 7→ σ(p, F(x)) are upper semicontinuous for all p ∈ Y ∗ , the inequalities
p(yi ) ≤ σ(p, F(xi ))
imply, by passing to the limit that
p(y) = lim p(yι ) ≤ lim sup σ(p, F(xι )) ≤ σ(p, F(x))
ι∈I
ι∈I
and hence p(y) ≤ σ(p, F(x)) which implies that
y ∈ cl(co(F(x))) = F(x).
The types of continuities of multifunctions considered in this chapter are the most common in
literature. Some other types will be considered in specialized sections of this textbook.
81