Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
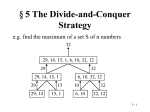
Kinetic Algorithms Data Structure for Mobile Data Plan Motivation Introduction Illustrative example Applications 2-D Convex Hull Closest pair in 2-D Others Issues Motivation Maintain an attribute of interest in a system of geometric objects undergoing continuous motion. Take advantage of the coherence present in continuous motion to process a minimal number of combinatorial event. Introduction Problems such as convex hull and closest pair maintenance have been extensively studied: Static objects Insertion and deletion operations Wasteful of computation Compute form scratch Introduction KDS? KDS: Kinetic Data Structure Process of discrete events associated with continuously changing data. Kinetisation Process of transforming an algorithm on static data into a data structure which is valid for continuously changing data. Introduction The Big Picture Resemble to a sweep-line/plane algorithm Use of a global event queue as interface between KDS and object in motion. Sweep line Time Introduction Flight plan Use of flight plans The motion of the objects is known in advance BUT: • Can be imprecise (use of intervals) • Can be updated Introduction How does it work? The correctness of whatever configuration can be guaranteed with a conjunction of low-degree algebraic conditions involving a bounded number of objects each. B A To Collinear A B C Inverse C A B C Introduction Certificates A certificates will guarantee the correctness of any configurations Introduction Timeline Event queue contains KDS events corresponding to times (precise / interval) when certificates might change sign. IF ( flight plan of O updated ) THEN All the certificates involving O must be recalculated and updated. Recapitulation Attribute certificates for any configurations Keep track of the change in the certificates and update when necessary Certificates Update Time Definitions Certificates Complexity Guarantee the correctness Number n of points moving in a system. Small cost If it running time of the order O Poly log( n) or O n for small Definitions Internal events (IE) Events process by the structure for its internal needs External events (EE) Events affecting the configuration we are maintaining. Lower bound for IE Definitions Efficiency Responsiveness If the ratio IE / EE is small. Range: 1 to Infinity Worst-case cost of processing a certificate Size Maximum number of events it needs to schedule in the event queue Definitions Compact If size linear to the number of moving objects Local If the maximum number of events in the event queue that depend on a single object is small Illustrative example Y Consider the following1D situation Given a set of n points moving continuously along the y-axis, we are interested to know which is the topmost point. • Constant speed • Arbitrary initial configuration Solution 1 Trivial Case Draw the lines in the ty-plane Compute the upper envelope of the set of lines. Onlog( n) Efficient algorithm but does not support update of the flight plan. Solution 2 Schedule-Deschedule Maintain, on-line, the sorted order along the y-axis Schedule event that is the first time when two consecutive points cross. Destroy and create 2 adjacencies Schedule and deschedule up to 2 new events Not efficient: process up to events. Solution 3 Heap For each link in the heap, a certificate guarantees that the child point is below the parent point. We associate an event at the time these points meet. Solution 3 Heap For an event we may interchange parent and child Solution 4 Kinetic Tournament Consider a divide-and-conquer algorithm, like a tournament from bottom to up for computing a global leader. On comparisons As long as each of the comparison remain valid the identity of the maximum remains valid. Solution 4 Kinetic Tournament Imagine that a particular comparison involved flip and precolated up the tree. For a balanced tree the computation is made in Onlog( n) time and can affect at most O log( n) certificates. Solution 4 Kinetic Tournament For points with constant speed, similar to the computation of the upper-envelope in the ty-plane. In the worst case we have n new leaders, each computed in O log( n) time, for a total worst case running time of Onlog( n) Solution 4 Kinetic Tournament KDS efficient compact local Winner 2D Convex Hull Problem Maintain the convex hull of a set of moving points in 2D. Dual form Point (p,q) to the line y=px+q 2D Convex Hull Goal: Maintain the upper envelope of the set of lines 2D Convex Hull Perform a kinetic tournament. Onlog( n) From a red and a blue chain maintain the purple upper envelope of the 2 chains 2D Convex Hull Kinetisation We keep a record of the entire computation in a balanced binary tree Each node is in charge of maintaining the upper envelope of two upper envelopes computed by its children If a event creates a change, the event is process through the tree. 2D Convex Hull Operators <x <y <s X value comparison Y value comparison Slope comparison Ce(ab) Contender edge ... Color of the vertex 2D Convex Hull Certificates 2-D Convex Hull Certificates 2D Convex Hull Example 2-D Convex Hull Lemma 2.1 Consider a configuration C of two convex piecewise linear functions and the certificate list L for their upper envelope as defined earlier. Let C’ be a configuration for which all the certificates of L hold. Then the upper envelope of C’ has the same combinatorial description as that of C. 2D Convex Hull Proof The x-certificates prove the correctness of the contender edge pointer. Any vertex that has a y-certificate in L is also guaranteed to be placed in C’ and in C. 2D Convex Hull Proof We can show that the vertices without y-certificates can not be placed differently in C and C’ 2D Convex Hull Certificate updates Lemma 2.2 The following procedure correctly updates the certificate list when the configuration events happen 2D Convex Hull Analysis Theorem 2.3 • The KDS for maintaining the convex hull is efficient, responsive, compact and local Proof • Responsive: O log( n) • Compact : • Local: • Efficient: O n2 in the worst case 2D Convex Hull Demo Demo Closest Pair in 2D Problem definition Given a set S of n moving points find the two closest points in S. Traditional static algorithms are illadapted for the kinematisation. Closest Pair in 2D Static Algorithm We divide the space around each vertex into six 60º wedges, the nearest neighbor of each point is the closest of the nearest neighbor in the six wedges. ADD PICTURE Closest Pair in 2D Definitions Dom(p): The right extending wedge that make ±30º angles with the x axis. Circ(p, r): The circle of radius r centered at p. We denote the closest pair in S, (a,b) Closest Pair in 2D Problem definition Lemma 3.1 Point b is not contained in Dom(p) for any third point p with a to the left of b. Lemma 3.2 The leftmost point in Dom(a) is b. Closest Pair in 2D Contradictions Lemma 3.1 Lemma 3.2 Closest Pair in 2D Algorithm The plane sweep algorithm performs a set of operation three times, for S rotated by 0 and ±60º. Closest Pair in 2D Algorithm For each point p in S from right to left Set Cands(p) = Maxima Dom(p) Set lcand(p) to be the leftmost element of cands(p) Delete points of Cands(p) from Maxima Insert p into Maxima at its proper place in y-order Repeat for the three directions Closest Pair in 2D Algorithm Analysis Sorting: Onlog( n) Compute Cands(p): O log( n) Finding lcand(p): O n in the worst case Splitting and inserting: O log( n) Total: Onlog( n) Closest Pair in 2D Kinetisation Certificates The projection of the point on x for S rotated by 0 and ±60º. Each point belong to a maximum of six certificates, involving is two neighbors in each of the three sorted order. Closest Pair in 2D Events Three types of event: Change of order in x Change of order in ±60º Closest Pair in 2D Updates Closest Pair in 2D Updates Closest Pair in 2D Analysis The KDS for the closest pair problem is efficient, responsive, compact and local. Efficient: The number of events process by the KDS is a logarithmic factor more then the maximum number of external events. Closest Pair in 2D Analysis Compact: Local: • There is O n events in the queue at any time, 3n 3 for the certificates and O (n ) for the kinetic tournament. • Each point belongs to ar most six certificates and to at most three pair p, lcand ( p) and in pair participate to at most Olog( n) events in the kinetic tournament Closest Pair in 2D Demo Demo Summary The way it works Further Issues Avoid the problem related to the finite precision arithmetic. (sequencing of the events) Change the definition of efficiency to make it proportional to the number if external events Adapt the algorithm to real time computation References J. Basch and J.Guilbas. Data Structures for Mobile Data. J. of Algorithms 31, 1-28 (1999). J. Basch and al. Data Structures for Mobile Data. SODA 1997, 756-767. http://graphics.stanford.edu