Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
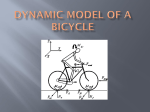
Stability of Tandem Bicycles Report by: Chris Wojtko Submitted: 03/03/2000 Project: HPV Tandem, Vehicle Dynamics Division A tandem bicycle has many advantages, especially in racing. With the same frontal area, the bicycle can have twice the power input as a single-rider bicycle. Currently, however, a single-rider bicycle holds the land speed record for a human powered vehicle (HPV). This suggests that there are problems with a tandem configuration that must be overcome before it will be able to reach its full potential. One of the areas in question is the stability and handling of a tandem bicycle. In reality, it is still not known what is required for good stability and handling on a single-rider bicycle. Though studies have shown that several variables contribute to the ridability of the bike, especially the geometry, none has been able to mathematically relate these variables to the forces acting on the bike. This is in contrast to most other aspects of the bike, including braking, frame deflection, and fluid flow, all of which can be estimated to a reasonable degree. Differences from a Single-Rider HPV Though it is true that no one can exactly predict whether or not a bicycle will be stable, bicycle manufacturers consistently produce stable bicycles. To ensure this stability, the bicycles all have at least two variables in common; first, racing, touring, and track bicycles all have similar steering geometries, and second, bicycles all have some degree of understeer. It is then necessary to ask, what is it about a tandem bicycle that will change the way it handles relative to a single rider bicycle? Some changes will be the overall length of the bicycle, the weight, the location of the center of gravity, and the fact that now two people will be leaning during turning instead of one. These two changes, however, will have little effect other than to change the weight on each tire, and possibly the distribution of weight on the tires. Therefore, it is reasonable to assume that a tandem bicycle will have the same forces acting on its tires as any other type of bicycle would. Bicycle Geometry According to a paper by David E. H. Jones, it is the geometry of the bicycle that is primarily responsible for its handling and steering characteristics. Using what he referred to as the stability criteria, he analyzed many different bicycles with regards to their steering geometries. He found that the head angle, fork offset (y), and wheel diameter are responsible for making the bike either stable or unstable (see Figure 1 in the appendix for illustrations of a typical bicycle geometry and Figure 2, below, for Jones’ graph of the stability criteria). Furthermore, he found that those bicycles in which quick response is most important were closest to the zero stability criteria line. In other words, there is always a compromise between how easily a bicycle handles and how easy it is to keep the bicycle going in a constant direction. Figure 2: Lines of stability according to Jones. The zero line is the neutral line, while negative values imply the bicycle becoming more stable. What is unclear from Jones’ research is exactly how the two graphs he shows were generated. From his research, the following conclusions were reached: The gyroscopic effect of the wheels of the bicycle does not account for it being either stable or unstable. A bicycle on which the gyroscopic effect is cancelled will not travel on its own, but it can also still be ridden. The reduction in the potential energy of a bicycle as it is leaned into a turn (thus causing a lowering of the center of mass) is not significant when studying its stability. The “front projection” of the bicycle is significant to its stability. The smaller the front projection is, the more stable the bike is. The front projection can be negative when the fork on a normal bike is reversed, resulting in a very stable bike. Conversely, a bicycle with a very large, positive front projection will be unstable. The force torque that acts perpendicular to a bicycle wheel when it is turned does have an effect on the stability. This torque acts until the line of the steering axis intersects the contact point of the wheel and the ground. In other words, the torque acting about the steering axis of the bicycle will continue to act until the trail of the bicycle become zero. It is our goal for the rest of this year to reproduce Jones’ graphs, using force analysis on a bicycle wheel. This second of these graphs is shown above, which was Jones’ final result. To obtain this graph, he also created the graph shown as Figure 4 in the appendix, which will be the graph referred to for the following sections. The first and easiest situation is to analyze the forces acting on a non-turning bicycle wheel. The situation in which the wheel is neither turning nor is the bike moving is fairly uninteresting. The only forces acting on the wheel are the weight acting downward, which is balanced by the normal force. A stationary bicycle which is leaned is a more difficult problem. Anyone who has pushed a bicycle could have noticed that tilting the bicycle to one side or the other resulted in the bicycle’s steering wheel turning in the direction of the lean. Because the bicycle is not moving, it cannot be a dynamic friction force. However, from the statics of the problem, it can be seen that it is the normal force that causes the wheel to rotate. When the bicycle is tipped out of static equilibrium, the normal force still acts directly upwards. This then generates a moment about the steering axis, which is directly related to the angle of lean, as it is the angle of lean that determines the distance between the steering axis and the point at which the normal force is acting. Were the steering axis also in the vertical plane, it can be seen from the attached diagram that the only effect the normal force would have in would be to create a moment related to the distance “d” to the steering axis. However, on a real bicycle, the steering axis is inclined at some angle. This angle, when measured from ground to the steering axis, is called the head angle. Because of this inclination, the normal force will have a component related to the head angle, which acts to create a torque about the steering axis. Computing the actual value of this torque is difficult, because the steering axis and force are at angles, causing the distance to vary. The forces that act on a moving, turning wheel are difficult to model due to the lean of the bicycle during turns. The book Fundamentals of Vehicle Dynamics, by Thomas D. Gillespie, describes the ground's reactions on the wheel of a vehicle using three forces and three moments. Each will be treated here. First is the normal force. The normal force, as always, acts upwards on the wheel, in the positive z-axis direction. The Fundamentals book gives equations which can be used to calculate the normal force on a two-wheel steering system. These equations can be modified for a bicycle. If d is the lateral offset at the ground (the distance between the point of contact of the wheel and the line of the steering axis) and is the lateral inclination angle (for a bicycle, this is the angle of lean during a turn), and is the angle of turn, then the first component of the moment due to the normal force is Mv = Fz d sin sin The reason that this moment will not necessarily be zero during a turn is the trail of the bicycle. If a bicycle had zero trail, then turning the wheel would not result in any moment being generated. However, for a bicycle with trail, the point of contact of the wheel to the road will move a small distance out of the plane of the frame of the bicycle. Figure 3, included in the appendix, illustrates this concept. For a turning wheel, there will be a lateral offset, resulting in a moment. The second component of the moment generated by the normal force is due to the caster angle. When a bicycle is being ridden straight, the normal force and the steering axis are in the same place, with no lateral distance between them. Therefore, at zero angle of lean, this moment is also zero. When the bicycle wheel is turned and the wheel leans, a torque is generated about the steering axis, given by Mv = Fz d sin cos In this equation, is the caster angle. The caster angle is the complement of the head angle on a bicycle. It can be measured from the vertical to the steering axis. This is illustrated by Figure 3 in the appendix. For a normal turn, at which the bicycle is moving at speed, the values of both of these moments will be small, because the angle of steer and angle of lean will be small. The notation used here implies that the y-axis is perpendicular to the direction of the wheel and that the z-axis is vertical. Summing the two moments, the total moment due to the vertical normal for is given by Mv = Fz d sin sin Fz d sin cos Because a bicycle tire has no angle of lean when it is not turning, this moment must be equal to zero for any the non-turning riding condition. The second force acting on the wheel is the lateral force. The lateral force acts perpendicular to the wheel and causes a moment due to the caster angle, which is the angle at which the steering axis is inclined. To calculate this moment, the equation ML = Fy r tan is used. The “r” in this equation is the tire radius, and is the caster angle. The next force is the tractive force. This force acts to create a moment about the vertical line to the point of connection of the kingpin due to the caster angle. On a bicycle, the kingpin offset is zero, so the tractive force is also zero. The next reaction is the aligning torque, Mz, which acts vertically and has a component acting parallel to the steering axis. This torque resists the turning motion, resulting in this torque causing understeer. The equation to calculate this moment is MAT = Mz cos The other two moments are the rolling resistance and overturning moments. According to Fundamentals of Vehicle Dynamics, both of these moments are small and are usually neglected in steering system analysis. At first glance, it may seem that these equations are straightforward and should be easily solved. However, many of the variables have hidden dependencies. For example, the Fy component of the force acts perpendicular to the direction of the wheel as a result of the friction force generated when the wheel is turned. Therefore, if the total friction force is F, then the component Fy is given by Fy = F sin where is the angle of turn of the wheel. The forces listed above should account for all the forces that act on the point of contact of the wheel with the road during any type of motion. Since the first goal of this project is to reproduce the graph by Jones, the height of the forkpoint must come into the equation in some way. It can be assumed, because the frame is rigidly attached to the wheel axis, that the angle of lean of the wheel will be the same as the angle of lean of the frame of the bicycle. Unfortunately, this problem becomes more complex because the angle of lean of the bicycle must be related to the angle of turn of the wheel. For now, we will make the simplifying assumption that the two vary linearly. Jones’ graphs support us in this assumption. As he found, the slope of the line dH/d is linear for small turning angles – in other words, for small angles, which is what occurs in any typical riding condition, the angle of lean is linear with the angle of turn. Therefore, since the angle of lean of the bicycle is (from the first moment equation above), the height of the forkpoint of the bicycle is H = H0 sin and, therefore, H = H0 sin where H0 is the height of the forkpoint when the bicycle is vertical. The forkpoint the point on the bicycle at which the line of the steering axis is intersected by a horizontal line through the axis of rotation of the wheel. This is also illustrated in Figure 1, the typical bicycle geometry. With these equations, it will now be possible to begin analyzing the forces acting on a bicycle wheel. First Steps in Force Analysis The first steps in calculating the forces acting on a wheel of a bicycle are in finding the moment due to the normal force. The problem so far has not been with the calculation of the moment – after estimating some of the required numbers, such as the caster angle (which is typically around 20 degrees), the trail (which varies depending on the function of the bicycle but is typically around 2 inches), and the weight on the tire (estimated at one quarter of the total weight of the system), the moment equation can be solved. The problem at this point has been in finding a software package that will allow the user to plot the lean angle on an x-y set of axis representing the steering angle () and the height of the forkpoint. At this point, the calculations do seem reasonable. The graph that is presented in the calculations section shows the height of the forkpoint as a function of the steering angle. As is expected, the height of the forkpoint varies linearly with the steering angle. The function is an absolute value to represent the height becoming less as the bike is leaned in either direction, and the value of that height decreases (if the ground is the zero point). The height of the forkpoint does not require an initial height in this calculation. For our purposes of matching Jones’ graph, we will use his notation, in which the height of the forkpoint was given as a fraction of the wheel radius. Since the wheel radius is equal to the forkpoint, the initial height cancels out of the equation, leaving the height as a function of the turning angle only. Future Research The steps from here will involve finding a software package that will allow the plot type we require. After we have this, we can continue by including the effects of the remaining forces.