Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
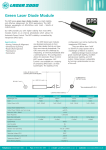
Probability Models for Estimating the Probabilities of Cascading Outages in High Voltage Transmission Network Qiming Chen, Member, IEEE, Chuanwen Jiang, Member, IEEE, Wenzheng Qiu, Member, IEEE, James D. McCalley Fellow, IEEE Abstract — This paper discusses a number of probability models for multiple transmission line outages in power systems, including generalized Poisson model, negative binomial model and exponentially accelerated model. These models are applied to the multiple transmission outage data for a 20-year period for North America. The probabilities of the propagation of transmission cascading outage are calculated. These probability magnitudes can serve as indices for long term planning and can also be used in short-term operational defense to such events. Results from our research shows that all three models apparently explain the occurrence probability of higher order outages very well. However, the Exponentially Accelerated Model fits the observed data and predicts the acceleration trends best. Strict chi-squared fitness tests were done to compare the fitness among these three models and the test results are consistent with what we observe. Index Terms—exponentially accelerated cascading, negative binomial distribution, generalized Poisson distribution, power law, high-order contingency, cascading, blackouts, rare events, multiple transmission outages. I. INTRODUCTION T he high order contingencies in power systems are of great interest nowadays because of their potential to cause huge losses and the advances in computing technology make the on-line analysis of high order contingencies possible[1][2]. The word “high-order” here means loss of multiple elements during a short time period in power systems. Such events are usually of lower probability than N-1 events which means loss of a single element in power systems. If power systems are weakened due to losses of more than one transmission line, what would be the probability that another transmission line trips? It is difficult to calculate or estimate their probability due to their few occurrences. However, it would be very useful to predict the likelihood of those events. For example, it would help engineers in the transmission and generation planning process, where capital investments in new facilities must be weighed against the extent to which those facilities reduce risk associated with contingencies. This could also help system operators to estimate and evaluate network security in operations, for control-room decision-making. Here, preventive actions, which cost money and are routinely taken in anticipation of N-1 events, are not reasonable for a rare event, Qiming Chen is a transmission planning engineer with PJM Interconnection Valley Forge, PA 19403, USA. (e-mail: [email protected] ). Chuanwen Jiang is with the Department of Electrical Engineering, Shanghai Jiaotong University, Shanghai, 200030, China. (email: [email protected]) Wenzheng Qiu is a generation interconnection planning engineer with PJM Interconnection Valley Forge, PA 19403, USA. (e-mail: [email protected] ). James D. McCalley is professor of Electrical and Computer Engineering at Iowa State University, Ames, IA 50011, USA. (e-mail: [email protected]). since the certain cost of the preventive action cannot be justified for the event that is so unlikely. Given that the number of rare events is excessively large and it is neither possible nor necessary to do analysis for all of them, to prioritize the events becomes crucial for on line analysis. The best way to prioritize event is by risk, which is the expected impact by definition. However, considerable computation would be needed to find out the impact. Another way to prioritize is by event probability, assuming the impacts of events are of about the same magnitude. The event with highest possibility will be “computed” next in developing operational defense procedures. Ways to estimate the probabilities of power system rare events include fitting an existing probability model to historical data, deriving the overall probability by system structure and individual components; and using Monte Carlo simulation. Dobson in [3] proposed the use of power law to model the occurrences of large disturbances recorded in [4]. Later on, a number of probability distributions, which are variants of quasi-binomial distribution and generalized Poisson distribution (GPD) [5], were proposed in [6]-[8]. Reference [9] presents work done by importance sampling to expose hidden failure. In this paper, a new model for forecasting the probability of high order contingencies, exponentially accelerated cascading (EAC), is proposed and it was compared with negative binomial model [11] and generalized Poisson model. There are different metrics in characterizing power system rare events, including the number of customers interrupted, power interrupted, energy not served, and the number of elements lost (i.e. N-1, N-2,…, where N-K means the lost of K transmission line in power system network). The latter one is employed in our probability model because it better conforms to planning and operating reliability criteria used in the industry. For example, reliability standards performance criteria are often categorized based on the number of elements lost. Although it is difficult to obtain the first hand statistical data from the power industry, the survey in [12] provides a good resource for academic research. All the conclusions and models from this paper are based on the large amount of actual statistical data gathered in [12]. This paper focuses on analyzing the fitness of a number of general probability models for the likelihood of transmission outages. It is not intended for any specific class of transmission outages, nor does it point out the methodology to identify and defend those contingencies. Readers interested in this may refer to [1][2][13][14] for further information. Section II of this paper gives a preliminary analysis of the transmission line outage for the past 20 years from 1965 to 1985. Section III describes three possible probability models: negative binomial (NB), generalized Poisson distribution (GPD)[1] and exponentially accelerated cascading (EAC). The EAC model is developed in this paper specifically for cascading transmission outages. Unlike the NB and GPD models, it has not been found in any other statistical text. Section III uses the maximum likelihood estimation to estimate parameters for the three models. The tail behaviors of the models are compared in Section V. Section VI uses a chi-squared test to compare the fitness among the three models. Section VII concludes and discusses. II. TRANSMISSION OUTAGE STATISTICS Ref. [12] is a detailed resource for power system reliability investigators considering the scale of the survey and the difficulty of obtaining statistics on power systems from different sources. The statistic data analyzed in this paper is the total number of elements lost in each contingency in North America from 1965 to 1985 [12], as indicated in TABLE I and Fig. 1. The last two columns give a summary. According to [12], the data reported in TABLE I, whenever an event involves components of different voltage levels, it will be counted as one instance only with a specific voltage level. TABLE I High order transmission outages statistics An IEEE survey of US and Canadian overhead transmission outages at 230kv and above, 1965-1985, [12] Number of Contingences By Line Voltage Levels Cont. Type Total No & Perc 230kv 345kv 500kv 765kv N-1 3320 5807 721 295 10143 89.85% N-2 303 577 35 36 951 8.42% N-3 39 99 3 2 143 1.27% N-4 18 16 0 2 36 0.32% N-5 7 1 0 0 8 0.07% N-6 0 1 0 1 2 0.02% N-7 3 1 0 0 4 0.04% N-8 2 0 0 0 2 0.02% 10 100 1 N-1 N-2 1000 10000 TABLE II Conditional Probability of N-K contingencies Cont. Accru. No Conditional Prob (%) Increasing Rate K ≥1 11289 K ≥2 1146 C1=10% - K ≥3 195 C2=17% C1/C2=170.0% K ≥4 52 C3=27% C2/C3=158.8% K ≥5 16 C4=31% C3/C4=114.8% K ≥6 8 C5=50% C4/C5=161.3% K ≥7 6 C6=75% C5/C6=150.0% K ≥8 2 C7=33% - - - The data is rearranged in TABLE II to obtain conditional probabilities conveniently. The second column of TABLE II counts the number of events with more than k lines outaged. For example, there are a total of 11289 events that involve at least one line outage, and 11289 is just the summation of the number of all outages listed in TABLE I. 1146 is the total number of events that involve at least two lines and so on. The last column of TABLE II lists the estimated conditional probability of N-K contingencies derived from the sixth column of TABLE I. They are calculated by the formula as follows: Pr( K k 1) Ck Pr( K k 1 K k ) (1) Pr( K k ) The estimate of Pr(K k 1 K k ) can be found by simply replacing Pr( K k 1) and Pr( K k 1) with the occurrence frequencies of the events K ≥ i and K ≥ k+1, respectively. Fig. 2 illustrates the relationship between Ck and k. Fig. 2 shows that the probability of any transmission outage that involves loss of more than one line is 10%, a value significantly larger than that commonly assumed. If North America power system loses 2 transmission lines and there is no other information considering the timing, causes, location of the event, the probability that it loses at least an additional line would be 17%, which is almost doubled compared to 10%. If the system loses 6 lines, the chance of losing another line is almost certain. This means that if a system is already in a weakened condition, the probability that it continues weakening would keep increasing until the event develops into a system-wide blackout. N-3 0% 10% 20% 30% 40% 50% 60% 70% 80% N-4 N-5 N-6 N-7 N-8 Fig. 1. log{Pr(k)} v.s. N-k plot Pr(K ≥ 2/ K ≥ 1) Pr(K ≥ 3/ K ≥ 2) Pr(K ≥ 4/ K ≥ 3) Pr(K ≥ 5/ K ≥ 4) Pr(K ≥ 6/ K ≥ 5) Pr(K ≥ 7/ K ≥ 6) Pr(K ≥ 8/ K ≥ 7) Fig. 2. Pr(K ≥ k / K ≥ k) v.s. k The increasing in conditional probability Ck with k is understandable. The loss of one element immediately raises the likelihood of losing another element, which has a similar effect, and so on. A fault and the follow-up relay trip of the component(s) cause transient oscillations throughout the power system and make other protection devices more likely to operate. The forced outage of one generator or line changes the power flow pattern, and some circuits, being more loaded, may trip either by proper or unintended protection operation. The more severe the previous event is, the more likely an additional event will follow. This tendency might be modeled statistically using a number of probability distributions, such as Poisson model, negative binomial model, power law, and GPD [2]-[3][6]-[9]. Some caution must be taken when using the data in [12] to draw a conclusion. First, a few utilities in the survey reported their transmission contingencies by single line outages [12]. If an event involved the loss of three lines, it was reported as three different single outages. In order to prevent a multiple line outage event from being counted as several single line outage events, the survey processed the data provided by those utilities. Outages reported by those utilities with identical initiating timing, i.e., occurring within one minute, were considered as one contingency with multiple line outages. All other utilities reported outages by events, i.e., multiple transmission outages in a single event were reported as one instance of outage. Second, it appears that some huge blackouts that outaged many lines, for example, the Northeastern US blackout of 1965 [15], were not correctly registered in the statistics, since the last stage of this event obviously outaged more than 8 lines. In order to mitigate the uncertainty in data error, all the outages that involve the loss of more than 7 lines are grouped into a single category, i.e., K ≥ 7. The number of events in this category is 4 + 2 = 6 and constitutes about 0.06% of total observed events. In order to mitigate the impact that would arise because of the possible inaccuracy, all the discussion that follows will be based on this treatment. III. THREE DISCRETE PROBABILITY MODELS FOR INTERDEPENDENT EVENTS We have shown in [11] that both Poisson Model and Power Law model are not desirable for transmission outages because the former underestimates the interdependence among transmission outages and the later overestimates. Generalized Poisson model (GPD) is first proposed to model over-dispersion [5] (variance greater than mean - note the variance and mean are equal for Poisson). There is evidence supporting the choice of GPD for the distribution of transmission line outages on small test systems [4][7]. This section introduces a new model: exponentially accelerated cascading model (EAC), which is specifically proposed for cascading transmission outages. The cluster model in [11], which is actually Negative Binomial model (NB) and gives the best among the three models in [11] fitting for the transmission outage statistics of TABLE I, will be re-discussed as well. A. Negative binomial distribution The negative binomial distribution (NB) is an established model for rare events such as car accidents [10][16], where interdependence between events or over-dispersion in a data set exists. We have presented in [11] that it is a better model for transmission line outage than Power Law model and Poisson model. The pdf (probability density function) of NB is given by ( 1 k 1) Pr K k , (k )( 1 ) 1 k 1 1 1 1 (2) where k 1, 2, ... The mean and variance of NB are given by E( K ) 1 (3) Var ( K ) 2 Note the sample space of K is {1, 2, 3,…} instead of {0, 1, 2, …} here, which is different from the usual way of defining NB. We do so because we want the sample space to be consistent with the number of lines outaged in power systems. B. Generalized Poisson distribution (GPD) model A generalized Poisson distribution is given by (k 1) k 2 Pr( K k , ) (k 1)! where k 1, 2, 3 ..., and 0 exp (k 1) , (4) where 1 > θ > 0 and λ > 0. There is also a GPD defined for θ ≥ 1. However, that is not discussed here in order to limit the scope of this paper. When θ = 0, the GPD degrades to a regular Poisson distribution with parameter λ. The mean and variance of GPD are given by E( K ) (1 ) 1 1 (5) Var ( K ) (1 ) 3 (6) For the same reason as we stated for negative binomial distribution, we use {1, 2, 3…} instead of {0, 1, 2…} for the sample space of K. C. Exponentially Accelerated cascading model (EAC) This model is based on the observation that there is an increasing trend of conditional probabilities in TABLE II and Fig. 2 approximately following a potential exponential relationship. Note that the ratios of the conditional probabilities in the last column of TABLE II vary in the vicinity of 150%. The exponential accelerated cascading (EAC) model proposed here assumes that the probability of another or more transmission outage(s) follows an exponential function of the number of lines already lost in the system. Denote the conditional probability Pr(K k 1 K k ) as Ck , then Ck 1 Ck , where is a constant and 1 (7) Suppose after N-1 contingency happens, the probability that one or more line outage happens with probability p C1 Pr(K 2 K 1) , then Ck p k 1 (8) Pr( K k ) Pr( K 2 K 1) Pr( K 3 K 2) Pr( K k ) Pr( K k 1) C1 C2 Ck 1 p p 1 p 2 p k 1 p k 1 by differentiation and necessary to use the log form to process it in computer. Since all the N-K contingencies with k≥ 7 in TABLE II are grouped due to their potential inaccuracy, the log likelihood formula here for the data set is given by log L( 1 ,, m k1 ,, k n ) n log Pr( K k ,, ) N log Pr( K 7 ,, ) k 1 m 7 1 m k{1, 2 ,, 6} (9) Pr(K k ) Pr(K k ) Pr(K k K k ) Pr(K k ) 1 Pr(K k 1 K k ) p k 1 L(1 ,, m x1 ,, xn ) of L(1 ,, m x1 ,, xn ) is sometimes extremely small, it is ( k 1)( k 2 ) 2 ( k 1)( k 2 ) 2 that 1 p k 1 (10) (12) where nk is the number of N-k contingencies and N7 is the number of N-K contingencies with K ≥ 7. Equation (12) will be applied to all three models in this paper. The sample spaces of the NB and GPD models shift from the usual {0, 1, 2, …} to {1, 2, 3 …}, so N-1 events correspond to the events K = 1 in NB and GPD models and so on . TABLE III A. Estimating the parameters of Negative Binomial model Conditional Probability of N-K contingencies Cont. k K≥k Count Cond. Prob (%) Ck Pr( K k ) Pr( K k ) 1 11289 - p 0 p0 0 1 p 0 0 (1 p ) 2 1146 10% p 1 p 0 p 1 0 (1 p ) 3 195 17% p 2 p2 1 p 2 (1 p 2 ) p 3 p (1 p ) 4 52 27% p 5 16 31% p 4 p4 6 p 4 6 (1 p 4 ) 50% p 6 k≥7 8 6 75% 3 5 - 3 3 3 3 5 p 10 p (1 p ) p 15 - 6 5 10 Substitute the pdf Pr k , of NB in (2) into the log 5 In equation (8), Ck increases with k without bound. It could go to infinity. However, Ck must be less than or equal to one because it represents a probability. To solve this apparent inconsistency, this model assumes that the exponential law only valid up to k = 6 and p 5 1 . If a system loses 7 lines in a sequence for one outage, the system is considered collapsed and there is no need to count further lost lines for statistical purpose. Note in the above derivation, the condition K 1 is omitted, since all the discussion here assumes that there is already a contingency, that is, Pr( K 1) 1 . likelihood formula (12) to get k 1 ( 1 k 1) 1 Log L N k log k 1,...,6 (k )( 1 ) 1 1 1 1 k 1 ( 1 k 1) 1 6 log 1 1 1 1 k 1,...,6 (k )( ) (13) The MLE Estimation for Negative Binomial model is equivalent to finding the and that maximize (13). Numerical technique is needed to find the global maximum (ˆ , ˆ) because there is no close form available for (ˆ , ˆ) . Fig. 3 plots the contour graph of ( , ) for likelihood. With the help of this plot, the optimal (ˆ , ˆ) is found out to be (2.675, 0.1225). 0.128 0.126 (2.675, 0.1225) 0.124 0.122 IV. MAXIMUM LIKELIHOOD ESTIMATION OF PARAMETERS 0.120 The log maximum likelihood estimation (MLE) [13] is given by log L(1 ,, m k1 ,, k n ) log Pr( k i 1 ,, m ) (11) i{1, 2 ,,n} = (1, 2, … ,m) and x = (k1, k2, …, kn) are defined as the distribution parameter vector and variable vector, respectively. The that maximizes L( | x) is called a MLE of the parameter , denoted as ˆ . It should be noted that ˆ must be a global maxima. Because it is easier to find the maxima of (11) than 0.118 0.116 2 2.2 2.4 2.6 2.8 3 Fig. 3. Contour plot of likelihood function (13): NB Model 3.2 B. Estimating the parameters of generalize Poisson model The log likelihood formula for the GPD model is given by Log L (k 1) k 2 k 1,...,6 N k log k! Pr K k 2.675 , 1.1225 exp (k 1) k 2 (k 1) 6 log 1 exp (k 1) (k 1)! k 1,...,6 (14) The maximum likelihood estimate of θ is given by the solution of (14), assuming no censored data, according to [1] (k 2)( k 1) c ni n(k 1) 0 k 1 (k 1) (k k ) (15) (k 1)(1 ) However, (15) is only correct for uniform sample data with k known for each of the observed events. Since the sample data available is heterogeneous because of the incomplete observablity of N-K events (K ≥ 7), it is not convenient to use (15) to get the maximum (ˆ, ˆ) . Inspection o f the contour graph in Fig. 4 yields the MLE of (ˆ, ˆ ) to be (0.108, 0.155). 1 ( 1 k 1) (k )( 1 ) k 1 1 1 1 (17) (k 1) k 2 Pr( K k 0.108 , 0.155 ) (k 1)! exp (k 1) (18) Pr( N k p 0.10295 , 1.515 ) p k 1 ( k 1)( k 2 ) 2 1 p k 1 (19) 1.56 β 1.55 1.54 0.10295, 1.515 1.53 1.52 1.51 θ 1.5 1.49 0.18 0.17 1.48 0.1 (0.108, 0.155) 0.1005 0.101 0.1015 0.102 0.1025 0.103 0.1035 0.104 0.1045 0.105 p 0.16 Fig. 5. Contour plot of likelihood function (16) (EAC Model) 0.15 The three models above are evaluated for k = {1,2,3,4,5,6} and k ≥ 7, and the results are shown in TABLE IV. These results are also plotted in Fig. 6. By inspecting Fig. 6, it can conclude that all three models reasonably predict the observed data as all of them fits very well for k=1,…,6. A careful examination of TABLE IV shows that for the N-K events with k > 6, the EAC model predicts the occurrence of these extreme events far more accurate than the other two models. EAC gives 0.00061 for the observed 0.00053, while the other two give 3.53E-05 and 9.16E-05, which are 10 times lower. Fig. 6 uses log-scale for probabilities, so it shrinks the apparent difference between three models. The strict statistic index χ2 is employed in Section VI to do further comparison for the three models. 0.14 0.13 0.12 0.1 0.102 0.104 0.106 0.108 0.11 0.112 λ Fig. 4. Contour plot of likelihood function (14): GPD Model C. Estimating the parameters for exponentially accelerated cascading model For the EAC model. LogL( p, n1 , n2 ,, n6 , N 7 ) nk Log p ( k 1) ( k 1)( k 2 ) 2 1 p k 1 6 log p 71 ( 71)( 72 ) 2 6 TABLE IV Comparing the fitness of three different probability models for the distribution of observed multiple line outages Cont. k Count Observed NB GPD EAC N-1 1 10143 0.8985 0.8995 0.8976 0.8971 N-2 2 951 0.08424 0.08299 0.0830 0.08689 N-3 3 143 0.01267 0.01407 0.01487 0.01226 N-4 4 36 0.003189 0.00275 0.00334 0.00244 N-5 5 8 0.00071 0.00057 0.000842 0.00062 N-6 6 2 0.00018 0.000124 0.000228 0.00013 6 0.00053 3.52E-05 9.16E-05 0.00061 k 1 6 6 (k 1)( k 2) nk (k 1) Log( p ) nk Log ( ) k 1 2 k 1 n 6 k 1 k log(1 p k 1 ) 36 log( p) 90 log( ) (16) Inspecting contour graph Fig. 5 yields ( pˆ , ˆ ) = (0.10295, 1.515). N-K,K > 6 1 Observed Probability Exponential Accelerated Cascading 24.7% 1 exp(1 ) 36.1% (21) (22) Negative Binomial 0.1 Generalized Poisson Model 40% 35% Pr( K ≥ k+1 / K ≥ k ) 0.01 0.001 Asymptotic Line P=36.1% 30% 25% 20% Assuming an N-2 contingency, the probability that a next contingency happens increased to 19% 15% 10% Assuming an N-1 contingency, the probability that a next contingency happens is 10% 5% 0% 0.0001 1 3 2 4 5 6 7 8 9 10 1 i 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 Number of Line Out (k) Fig. 6. The log-log plot of PDF for NB, GPD and EAC models Fig. 8. Propagation of cascading sequence accelerates: GDP Model V. TAIL BEHAVIORS OF THE MODELS With the three models discussed in the last section, the conditional probabilities can be obtained by 1 Pr( K j ) Pr( K k 1) j k 1 Pr( K k 1 K k ) Pr( K k ) 1 Pr( K i) i k (20) Fig. 7 shows that there is an increasing accelerating trend for the probability of occurrence of next events with the number of lines already lost. However, the acceleration rate decreases continuously and stabilizes at 24.7%. The conditional probability for the GPD model can be calculated the same way as the NB model. Fig. 8 shows that the GPD model is similar to NB model in that both of them give the accelerating trend of cascading transmission line outages and the acceleration rate converges as k becomes large, except that the GPD model converges to probability 36.1%, which is much more larger than the value 24.7% in NB. Fig. 9 plots the conditional probabilities in (20) for the EAC model. The values approximate the actually observed values properly, with the observed values less than the EAC model for k ≤ 3 and greater for k ≥ 4. When k ≥ 7, it can be judged from the increasing trend that the subsequent event happens with certainty, a prediction supported by the statistics in TABLE I. Fig. 10 plots all the conditional probability from the three ideal models and the actual data together in one graph. All three models match the actual data closely when k≤3. When k≥4, the NB and GPD models start to deviate from the observed values and the EAC model keeps following. 0.9 Exponential Accelerated Cascading (EAC) 0.8 Observed conditional probability 0.7 0.6 0.5 0.4 30% P(K ≥ k+1 / K ≥ k) 25% Asymptotic Line P=24.7% 0.3 0.2 20% Assuming an N-4 contingency, the probability 0.1 15% that a next contingency happens is more than 30% Assuming an N-2 contingency, the probability that a next contingency happens increased to 17% 10% 0 0 1 2 3 4 5 6 Number Lines in Outage (k) Assuming an N-1 contingency, the probability that a next contingency happens is 10% 5% 0% 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 Number of Line Out (k) Fig. 7. Propagation of cascading sequence accelerates: NB Models The asymptotic conditional probabilities for the NB and GPD models are given by (21) and (22) respectively. Fig. 9. Propagation of cascading sequence accelerates: EAC Model 7 decomposed into 5 exclusive sets. They are S1={1}, S2={2}, S3={3}, S4={4}, S5={5, 6, 7, … }. The reason to group them this way is that for all Si and all three models tested, P(XSk)Nk (where Nk is the number of samples that fall in set Sk) is greater than 5%, which is suggested for the credibility of the fitness test. 100% Conditional Probability (K ≥ k+1|K ≥ k) EAC 90% Observed 80% GPD NB 70% 60% TABLE V 50% 2-Test results for NB, GPD, and EAC models 40% NB 30% k nk 10% 1 0% 2 2 3 4 5 6 7 8 Number Lines in Outage (k) 9 10 11 Fig. 10. Comparing the propagations of cascading VI. FITNESS TEST OF THREE DIFFERENT PROBABILITY MODELS The discussion in Section IV and V provides qualitative evidence that the EAC model fits the data better than NB and GPD models. In this section, the chi-squared test is applied to provide quantitative evidence. The chi-squared test, based on the Pearson theorem [17], is widely used in statistics to test the fitness of a probability model to sample data. Suppose a certain random trial has k possible outcomes, the probability that each trial results in the kth outcome is pk, k=1, 2, 3, …, m, where pk=1. If n trials are performed, and the kth outcome results Nk times, then the multivariate distribution of Nk is Pr( N1 n1 ,, N m nm p1 ,, pm ) n! p1n p2n pmn n1!n2 ! nm ! 1 m 2 (23) n m with p m k n and k 1 k 1 k 1 Pearson theorem: Suppose the parameters of a polynomial distribution has the pdf as in (23), and define N m 2 npk np k 2 k (24) k 1 when n, 2 follows the chi-squared distribution 2 (k-1). One can see from (24) that the statistic 2 is an index for how much the samples deviate from the polynomial distribution to be tested. The larger the statistics 2 is, the larger the deviation is. In order to apply the Pearson theorem, we need to convert the distribution we are going to test into a polynomial distribution. Since the sample space of the three distributions is {1, 2, 3, …}, and it is an infinite set, it can be grouped into m exclusive sets denoted as Sk=1, 2, 3, …, m. Suppose K is a random variable and its pdf is Pr(K=k), k{1, 2, 3, ...}. A total of n samples of K are drawn from pdf f (k). Count and denote the number of samples that are members of the set Sk. as Nk. Denote pk as Pr(KSk). Then the random variables Nk, (k=1, 2, … , m) follow the polynomial distribution of (23). The statistics 2 defined in (24) follow 2(m-1) distribution. If 2 is too large, then it is reasonable to doubt the fitness of the tested model with respect to the data. In this test the sample space is EAC pk pkn pk pkn pk pkn 10143 89.946% 10154.93 89.763% 10134.22 89.705% 10127.69 951 8.299% 936.95 8.300% 937.06 8.689% 981.02 3 143 1.407% 158.85 1.487% 167.92 1.226% 138.45 4 36 0.275% 31.02 0.334% 37.71 0.244% 27.50 ≥5 17 0.073% 8.25 0.116% 13.10 0.136% 15.33 20% 1 GPD 2 11.88 5.15 3.90 (m, r) (5, 2) (5, 2) (5, 2) m-r-1 2 2 2 1- quantile 0.066% 13.80% 27.85% The Pearson theorem assumes all parameters for the distribution to be tested are known. If there is any unknown parameter so that pi’s are just estimates, the degrees of freedom of the chi-squared distribution need to be reduced by one for each estimated parameter. The rule is if there are a total of r estimated parameters, the degrees of freedom of the chi-squared distribution are reduced by r to become m-r-1. For the GPD model, parameter and θ are estimates, so the chi-squared distribution has degrees of freedom 5−2−1=2. The NB and EAC models also have two estimated parameters, so the degrees of freedom for both of them are 2 too. The test result is summarized in TABLE V. The last row of the table shows the probability of getting a sample deviation larger than observed, assuming the sample comes from the corresponding probability model. The EAC is far more fit than the other two. VII. CONCLUSION AND DISCUSSION A new model (EAC model) was proposed in this paper to estimate the probabilities of high-order transmission line contingencies. Two other possible models: NB and GPD were also discussed in the paper. Comparison has been done among these three models. All three models show that there is an accelerating trend in the spreading transmission outages after the initiating outage. The EAC model provides the best fits among all three models. This model is simple and easier to understand than the other two yet gives better prediction for the observed outage data. Its two parameters p, which represents the probability of occurrence of N-2 given an N-1 event at the start of a cascading transmission blackout, and β, which quantifies the increasing rate of the conditional probability, i.e., Pr(N-K-1/N-K), are estimated to be 10.3% and 1.515. That means that around 10% of all transmission outages involve more than one line and after the first outage, the cascading outage happens with probability increasing by a factor 1.515 for each additional line lost. All three models can be employed to evaluate and compare large power systems’ resilience to cascading events. For example, if the survey data is provided with information regarding the locations of contingencies, we can model eastern and western interconnection separately and compare the model parameters for the two systems. On the other hand, if the survey data is provided with time stamps for each contingency, we can model the first and the last ten-year period separately. This way, we can find out if the reliability of power systems in US and Canada has been improved. System Protection Schemes (SPS)[20], which involve a wide range of automatic mitigation actions, such as under frequency load-shedding, under voltage load-shedding, and controlled islanding, are installed in a number of large power systems in the last ten years. They are designed to prevent large blackouts and should reduce the number of cascading outages. After they are in operation for many years and with sufficient statistics, the models in this paper can be applied to the collected statistics of the system with and without SPS to find out if the tendency of having a cascading blackout is reduced. Risk and decision analysis, which is of great interests to utilities as power industries are moving toward a more competitive environment, depend on accurate estimate of failure probabilities of power system components. The results of this work will enhance decision making at both the planning [21] and operational [22] level by giving quantitative probabilities for high order contingencies. In particular, operational procedures for defending against large outages are of great interest to authors[2][14], and the proposed models in this paper are candidates to aid in allocating computational resources as they are used on-line to develop defense strategies as real-time conditions change. [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] [21] VIII. ACKNOWLEDGMENT The authors thank Professor Ian Dobson of University of Wisconsin, Madison for useful discussions. [22] International Conference on System Sciences, Kauai, Hawaii, January 2006 I. Dobson, B.A. Carreras, D.E. Newman, “Branching process models for the exponentially increasing portions of cascading failure blackouts,” Thirty-eighth Hawaii International Conference on System Sciences, Hawaii, January 2005 A. G. Phadke and J. S. Thorp, “Expose hidden failures to prevent cascading outages in power systems,” IEEE Comput. Appl. Power, vol. 9, no. 3, pp. 20–23, Jul. 1996 W.A. Thompson, Jr., Point Process Models with Applications to Safety and Reliability, Chapman and Hall, 1988 Qiming Chen and James D. McCalley, “A Cluster Distribution as a Model for Estimating High-order Event Probabilities in Power Systems,” Probability In The Engineering and Information Sciences, Vol. 19, .Issue 04, 2005, pp489 – 505 R. Adler, S. Daniel, C. Heising, M. Lauby, R. Ludorf, T. White, “An IEEE survey of US and Canadian overhead transmission outages at 230 kV and above”, IEEE Trans. on Power Delivery, Vol. 9, Issue 1, pp 21 -39, Jan. 1994 Mili, L., Qui, Q. and Phadke, A.G. (2004) ‘Risk assessment of catastrophic failures in electric power systems’, Int. J. Critical Infrastructures, Vol. 1, No. 1, pp.38–63 Qiming Chen, Kun Zhu James D. McCalley, “Dynamic decision-event trees for rapid response to unfolding events in bulk transmission systems,” Power Tech Proceedings, 2001 IEEE Porto Volume 2, 10-13 Sept. 2001 Joseph C. Swidler; David S. Black; Charles, R. Ross; Lawrence J. O’Connor, Jr., Report to the President By the Federal Power Commission On the Power Failure in the Northeastern United States and the Province Of Ontario on November 9-10, 1965 Miaou, S.-P., and Lum, H., "Modeling Vehicle Accidents and Highway Geometric Design Relationships," Accident Analysis and Prevention, 25(6): 689-709, 1993 J. Neter, M. H. Kutner, C. J. Nachtsheim, W. Wasserman, Applied Linear Statistical Models (4th edition), R. D. Irwin, 1996 D. C. Elizondo, J. de La Ree, A. G. Phadke, and S. Horowitz, “Hidden failures in protection systems and their impact on wide-area disturbances,” in Proc. IEEE Power Eng. Soc. Winter Meeting, vol. 2, 28 Jan.–1 Feb. 2001, pp. 710–714 Jun Zhang; Jian Pu; McCalley, J.D.; Stern, H.; Gallus, W.A., Jr.; “A Bayesian approach for short-term transmission line thermal overload risk assessment,” IEEE Transactions on Power Delivery, Vol. 17, Issue 3, July 2002, pp770 - 778 CIGRE, task Force 38.02.19, “System protection schemes in power networks,” CIGRE SCTF 38.02.19, 2000 Miranda, V.; Proenca, L.M.; “Why risk analysis outperforms probabilistic choice as the effective decision support paradigm for power system planning,” IEEE Transactions on Power Systems, Vol. 13, Issue 2, May 1998 pp:643 - 648 M. Ni; J. McCalley; V. Vittal; and T. Tayyib; “On-line risk-based security assessment,” IEEE Transactions on Power Systems, Vol. 18., No. 1, February, 2003, pp 258-265 REFERENCES [1] [2] [3] [4] [5] [6] [7] Qiming Chen, James D. McCalley, “Identifying High Risk N-k Contingencies for Online Security Assessment” IEEE Transactions on Power Systems, Vol. 20, Issue 2, May 2005, pp 823 – 834 Qiming Chen, "The probability, identification and prevention of rare events in power systems," Ph.D. dissertation, Dept. Electrical and Computer. Eng., Iowa State Univ., Ames, 2004 B.A. Carreras, D.E. Newman, I. Dobson, A.B. Poole, “Evidence for self-organized criticality in a time series of electric power system blackouts,” IEEE Transactions on Circuits and Systems I, Vol. 51, no 9, Sept. 2004, pp 1733 - 1740 The Disturbance Analysis Working Group (DAWG), [on-line] Website:http://www.nerc.com/dawg/welcome.html Consul, P. C. Generalized Poisson Distributions: Properties and Applications, Marcel Dekker, New York, 1989 I. Dobson, B.A. Carreras, D.E. Newman, “A branching process approximation to cascading load-dependent system failure,” Thirty-seventh Hawaii International Conference on System Sciences, Hawaii, January 2004 I. Dobson, K.R. Wierzbicki, B.A. Carreras, V.E. Lynch, D.E. Newman, “An estimator of propagation of cascading failure,” Thirty-ninth Hawaii Qiming Chen (M’04) received the B.S. and M.S. from Huazhong University of Science and Technology, Wuhan, China in 1995 and 1998 respectively. He received the Ph.D. degree in electrical engineering, Iowa State University, Ames, in 2004. He joined PJM Interconnection, Eagleville, PA, as a Transmission Planning Engineer in 2003. Chuanwen Jiang (M’04) is an associate professor of the School of Electric Power Engineering of Shanghai Jiaotong University, P.R.China. He got his M.S. and Ph.D. degrees in Huazhong University of Science and Technology and accomplished his postdoctoral research in the School of Electric Power Engineering of Shanghai Jiaotong University. He is now in the research of reservoir dispatch, load forecast in power system and electric power market. Wenzheng Qiu (M’04) received the B.S.(1995) and M.S.(1998) from Huazhong University of Science and Technology, Wuhan, China in 1995 and 1998. She worked for North East Power Research Institute from 1998 to 2000. She received the Ph.D. degree in electrical engineering, Iowa State University, Ames, in 2004. Currently, She works in PJM Interconnection, Eagleville, PA, as a Transmission Planning Engineer. James D. McCalley (F’04) received the B.S., M.S., and Ph.D. degrees in electrical engineering from Georgia Institute of Technology, Atlanta, in 1982, 1986, and 1992, respectively. He was with Pacific Gas & Electric Company, San Francisco, CA, from 1985 to 1990 as a Transmission Planning Engineer. He is now a Professor of Electrical and Computer Engineering at Iowa State University, Ames, where he has been employed since 1992. He is a registered professional engineer in California.