Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Aerodynamics wikipedia , lookup
Minimum control speeds wikipedia , lookup
Scramjet programs wikipedia , lookup
Wind-turbine aerodynamics wikipedia , lookup
Non-rocket spacelaunch wikipedia , lookup
Multistage rocket wikipedia , lookup
Flight dynamics (fixed-wing aircraft) wikipedia , lookup
SM-64 Navaho wikipedia , lookup
Single-stage-to-orbit wikipedia , lookup
Saturn (rocket family) wikipedia , lookup
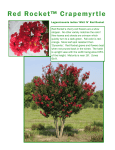
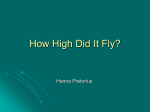
1 A.1.2.3.2: Aerodynamic Forces Aerodynamic forces quickly emerge as a major component of the design process. Center of pressure, normal and axial forces, pitching moments, shear stresses and bending moments all require analysis. In a more detailed design process (perhaps one with an operating budget), our analysis would have included extensive wind tunnel testing to validate our decisions and provide “real world” numbers. As a class however, our hands are tied to theoretical models and numerical solutions. If the rocket this project studies were moved into a “build” phase, wind tunnel testing would be absolutely necessary to ensure the aerodynamic characteristics of our design were reasonable and accounted for in the other aspects of our design. Our aerodynamic forces code was the main component from which we offered solutions for the other members of the design team. D&C, Structures, and Trajectory were all affected by its results. The seed from which the code grew was the search for a valid center of pressure (CP). We surmised early on in the design process that the CP would be required by the dynamics and controls group. The CP is essentially the point along the rocket body where the various forces acting on the rocket come together to act as if they were one force (and by extension, one moment). Our initial research on this subject yielded several interesting processes by which we could calculate a valid CP location. The simplest method of determining the center of pressure is one very familiar to the model rocket builders of the world. For these cases, maintaining a CP behind the center of gravity (CG) is necessary for static stability. In subsonic conditions, a conservative estimate for the rocket’s CP is located at the center of its lateral area.1 For an amateur rocketeer, a common way of using this information is to make a thin cardboard cutout in the shape of their rocket, and suspend the cutout across a sharp edge, like a ruler. Since cardboard is of uniform density, and is assumed to be of negligible thickness, the point about which the cutout is stable is the rocket’s CP. As a method of doing this computationally, we set up a computer code to determine the projected area of each rocket section, using a triangle for the nose, a square for the cylindrical stages, and a trapezoid for the “shoulder” or skirt sections. The code then summed these sections from the nose to determine the overall area. Halving this value, we designed the code to step from the Author: Alex Woods 2 A.1.2.3.2: Aerodynamic Forces nose until reaching the half area, and then determined the fraction of the current section that was on either side of the center point. This resultant point was the CP by the lateral area method. There were a few problems associated with this method of finding the Center of Pressure. First, the model essentially assumes an angle of attack of 90º, which is only present as a launch stand condition for most rockets. As a result of this initial assumption, the CP location is very conservative for the purposes of small rockets, and more importantly, not necessarily indicative of an actual value. Instead it gives a maximum limit for the CG if static stability is required. For the purposes of the design project, this stipulation was unnecessary, since with the use of Gimbaling or LITVC, static stability is unnecessary, or even undesirable. With this in mind, our efforts turned toward the Barrowman Method. This is a method of analytically finding the CP by using the rocket’s geometry. The advantages of this method are several: it gives a much less “conservative” location for the CP, it is relatively simple to calculate, and it is relatively accurate for the conditions it is designed for. The method involves dividing the rocket into several portions (nose, cylinders, shoulders/boattails, and fins), and determining the surface area and volume of each section. These geometric components are directly related to the coefficients of normal force and pitching moment (CN and Cm respectively) as follows: 8 S ( L) S (0) d2 8 CM L * S ( L) V d3 CN Author: Alex Woods A.1.2.3.2.1 A.1.2.3.2.2 3 A.1.2.3.2: Aerodynamic Forces where L is the length of the section, S is the cross-sectional area of the section at the given location, d is a reference length equal to the diameter of the base of the nosecone, and V is the volume of the section. If we take XCP to be the location of the center of pressure, then C X CP d * M CN A.1.2.3.2.3 Where CM is computed from the tip of the nose cone. By computing XCP for each section, it is possible to determine the overall location as so: X CP ,Overall CN , Nose * X CP , Nose CN ,Shoulder * X CP ,Shoulder ... C A.1.2.3.2.4 N For a more detailed treatment of the Barrowman method, please refer to reference 1. Using Vanguard geometry, we designed a computer program to calculate XCP using the Barrowman method. This gave us a result of 25.9% of the body length from the tip of the nosecone. This was where we ran into Barrowman’s limitations. The report states a series of rather strict assumptions, including that the angle of attack is approximately zero, and that the flow is both steady state and subsonic. The Vanguard report published a wind tunnel center of pressure graph that starts at the beginning of the transonic regime, but it suggests that the subsonic CP was around 40%. Furthermore, the Vanguard report includes data for the CP vs. angle of attack, which deviate quite significantly from the initial zero case. The Barrowman Method is unable to account for this change and thus we renewed our search for a serviceable aerodynamic model. We then considered a third model, Newtonian Theory. The advantages of this model are apparent simplicity, and a high degree of accuracy even at very high angles of attack. The main disadvantage is that the method is only valid at very high Mach numbers; starting at about Mach Author: Alex Woods 4 A.1.2.3.2: Aerodynamic Forces 5 – hypersonic speeds. It was certainly a valuable tool if we found our rocket would reach those speeds, but lacked the range of Mach numbers we would need for the overall design. For the purposes of the project then, our model required several characteristics. First, we needed it to function over the majority of our rocket’s flight Mach numbers; i.e. we needed subsonic, supersonic, and perhaps even hypersonic values. Since transonic flows are poorly understood even by state of the art computational models, we were forced to “fudge” these values in the final design with some eye to historical models – realizing that wind tunnel testing would be required for proper analysis here. In addition to a large range of Mach numbers, we needed our model to accurately predict CP’s across a range of angles of attack. A study of the vanguard report revealed that our angle of attack range would probably not progress past six degrees, but we wanted to be prepared for as many as fifteen. 4 We searched through aerodynamic texts and consulted knowledgeable professors, and finally came upon the most serviceable method for needs. Linear perturbation theory allows us to compute all of the major aerodynamic forces in a relatively simple fashion. By computing coefficients of pressure over the surfaces of the launch vehicle, perturbation theory gives us the building blocks of normal forces, axial forces, shear stresses, bending moments, and the ever elusive center of pressure. It is important when using linear perturbation to study the theory’s underlying assumptions. The first is that the flow is steady and isentropic. The second is that the airflow is irrotational. Third, that the flow is inviscid. The theory goes on to assume that the changes in the vehicle geometry (the perturbations) are small, and that the vehicle is at a small angle of attack. The resulting equation is as follows 2 2 (1 M 2 ) 2 2 0 x y A.1.2.3.2.5 where Ǿ is the velocity potential, x and y are Cartesian axis directions, and M is mach number.2 Author: Alex Woods 5 A.1.2.3.2: Aerodynamic Forces The above equation may be written as well in cylindrical coordinates as follows ( M 2 1) 2 2 1 0 x 2 r 2 r r A.1.2.3.2.6 where φ is the perturbation velocity potential, r is the radial direction and x is the axial direction.3 Using Eq. A1.2.3.2.6, the term that governs Cp for slender, axially symmetric bodies is 2 2 2 1 1 Cp u0 x u02 r r A.1.2.3.2.7 where θ is the angular direction in the cylindrical coordinate system and u0 is the freestream velocity.3 The problem that the aerothermodynamics group ran in to was the difficulty in applying the velocity potential φ – itself a differential equation – to a “real world” problem. As a result, the decision was made to use a method more correct for airfoils than for launch vehicles, for which a simpler equation was available. The reason the equations are not the same is that the shape of an airfoil allows certain crossflow velocities to be neglected.3 Due to the small size of our rocket, we decided that the simplification was reasonable. Also, because we continue to integrate around the longitudinal axis of the rocket, our theory retains some of the accuracy that would otherwise be lost. Discussion with knowledgeable professors and accuracy of our final numbers has served as justification of our results. 4, 5, 6 We make use of an equation from Anderson to calculate our data: Cp Cp 2 M 2 1 Cp0 1 M 2 (supersonic) A.1.2.3.2.8 (subsonic) A.1.2.3.2.9 Author: Alex Woods 6 A.1.2.3.2: Aerodynamic Forces where θ here is the geometric angle of the launch vehicle geometry with respect to the freestream velocity, and Cp0 is the incompressible pressure coefficient, for which we also used 2θ. We implement Eq’s A.1.2.3.2.8 and A.1.2.3.2.9 respectively using the code “CP_Linear_two.m”, which runs off the master “call_aerodynamics.m”. We use the lengths and diameters of each vehicle section to find the angle θ of the geometry. We then take angle of attack (α) into account by adding α to θ for the lower surface of the rocket and subtracting α from θ for the upper surface geometry. We do compute Cp at many different points along the launch vehicle surface at regular intervals, creating a vector of Cp’s. The pressure coefficients form a distribution along the launch vehicle body as shown: Fig. Section A.1.2.3.2.1: Pressure distribution over the length of a 3 stage launch vehicle at Mach 4.5 and 0 degree angle of attack (Alex Woods) We can see here that geometry, Mach number, and angle of attack are the primary variables that affect pressure distribution. As geometry changes, the shape of the Cp spikes change, with higher, thinner spikes coming with shorter, higher angle changes in geometry. The overall magnitude of the distribution changes with Mach number, and the difference between the upper and lower surfaces grows with angle of attack. Author: Alex Woods 7 A.1.2.3.2: Aerodynamic Forces Normal Force Coefficients Once “CP_Linear_two.m” completes the task of creating pressure distributions, we can integrate those distributions to derive the aerodynamic forces acting along the rocket body. The first of these is the normal force coefficient, CN. We can integrate using the equation: L CN 2 1 r dz C p cos d S 0 0 A.1.2.3.3.1 where S is a reference area in square meters, r is the radius of the rocket at dz in meters, L is the overall length of the rocket in meters, and θ is the angle of the rocket in radians with respect to the windward point. For the purposes of Bellerophon, we use the base of the first stage of the launch vehicle as the reference area. Within linear_two, we make this equation work by first integrating around the rocket body for the lower and upper surface, resulting in an “average” Cp for each. This is then integrated along the axial direction by subtracting the upper surface C p from that of the lower surface, giving a resultant pressure difference, and multiplying by the radius and the step size (taken to be 0.1 meters in the analysis). Summing and dividing by the reference area, we compute CN for the launch vehicle. The behavior of the resulting coefficient may be seen in the following figures: Fig. A.1.2.3.3.1, Normal coefficient vs. angle of attack for a 3 stage launch vehicle (Alex Woods) Author: Alex Woods 8 A.1.2.3.2: Aerodynamic Forces Fig. A.1.2.3.3.2, Normal force coefficient vs. vehicle length at 6º aoa and M = 3.5 for a 3 stage launch vehicle, (Alex Woods) Fig. A.1.2.3.3.3, Normal Force Coefficient vs. Mach number for a 3 stage launch vehicle at 0º angle of attack (Alex Woods) Author: Alex Woods 9 A.1.2.3.2: Aerodynamic Forces We can see from Figure A.1.2.3.3.1 that normal forces increase with angle of attack. Also we see from Figure A.1.2.3.3.2 that they are distributed over the length of the launch vehicle in a fashion similar to that of the Cp distribution. Of note is that for zero angle of attack, the output of CN from CP_Linear_two is non-zero, when theoretically it should in fact be zero. This is caused by a flaw in the code that could not be resolved before the conclusion of this project. The slope of the CN vs α curve should be steeper as well than is represented. Furthermore, theory predicts a linear relationship between CN and α, but in the real world this relationship is non-linear, with CN increasing at a greater rate than predicted. This non-linearity begins around α= 6º, and becomes too great to neglect at least as early as 14º. Finally, bear in mind that the values within the transonic region of the graph are of place-holder value only; they are not based on any valid theory. Moment Coefficient (A.1.2.3.4) Directly related to the coefficient of normal force is that of the pitching moment, C M. We chose the pitching moment to be the moment about the nose caused by the normal force acting at the center of pressure. This quantity is determined theoretically as such: L 2 1 CM r ( z )dz C p cos d S0 0 A.1.2.3.4.1 where z is the distance of the current point from the tip of the nose cone. By this method, each point along the distribution vector generates a separate moment, and the magnitude of that moment tends to increase as we move along the body of the launch vehicle. By summing the vector (integrating in theory) we calculate the overall scalar value of C M. Since CM is directly related to CN, the change of CM with angle of attack with Mach number is very similar in behavior, as can be seen in the following figures: Author: Alex Woods 10 A.1.2.3.2: Aerodynamic Forces Fig. A.1.2.3.4.1, Variation of pitching moment coefficient with Mach number at 0º aoa (Alex Woods) Fig. A.1.2.3.4.2, Variation of pitching moment coefficient with angle of attack at Mach 3 (Alex Woods) Author: Alex Woods 11 A.1.2.3.2: Aerodynamic Forces We can see here that once again, CM has a linear progression with angle of attack and a nice curve with changing Mach number. There are several characteristics that we must note about these plots. First, the slope of the plot in Figure A.1.2.3.4.2 is slightly steeper than that in the normal load. This is expected, as it produces a changing CP with changing angle of attack. Also, in reality the plot in Figure A.1.2.3.4.2 would have some non-linearity, but in a less pronounced fashion than what one would find in the normal coefficient.3 Finally, we note once again that this data is not reasonable for the transonic or hypersonic regions. Center of Pressure A.1.2.3.5 Since we calculate both normal and moment coefficients, we can produce a valid location for center of pressure using equation A.1.2.3.2.3. For the purposes of this analysis, we found it more useful to use the following modification, which outputs the CP location as a fraction of the body length from the tip of the nosecone: C X CP M CN A.1.2.3.5.1 This equation was used directly to produce a CP location that changes with angle of attack, as the vanguard report suggests it should.2 A visualization of this variance can be found in the following figure: Author: Alex Woods 12 A.1.2.3.2: Aerodynamic Forces Fig. A.1.2.3.5.1, XCP vs angle of attack for a 3 stage vehicle at Mach 3 (Alex Woods) Figure A.1.2.3.5.1 shows that the center of pressure will move aft along the rocket body as angle of attack changes, which is what we expect for a launch vehicle.3 We have some issues with the validity of the results however. We found that the CP values being output by the code tend to begin lower and higher than real world data, by as much as 30%. The change of CP from minimum to maximum also occurs faster than the Vanguard data would suggest.2 Finally, the location of the CP does not vary with Mach number in our results. While this is consistent with linear theory, it does not agree with information found in the Vanguard report, which has wind tunnel data showing an aft CP in the subsonic region, and a spike even farther aft in the transonic region. In the subsonic region this difference can probably be attributed to viscous effects. Since the location of the CP is determined by an integral of forces acting along the vehicle surface, it seems reasonable that if viscous effects were included, they would heighten the effect of long cylindrical stages present on the launch vehicle. This would be particularly true if flow separation occurred on the aft surfaces, which is also something not modeled by the aerodynamic codes. We note the same characteristics in the transonic region, with the addition of possible shocks as flow accelerates over the vehicle surfaces. Author: Alex Woods 13 A.1.2.3.2: Aerodynamic Forces Axial Force Coefficient We find axial force along the launch vehicle is the prime component of drag for low angles of attack. As such, deriving an axial force coefficient (CA) based upon vehicle geometry was a top priority for the design team. Once again we turn to linear perturbation theory for a solution. Using the pressure distribution as described in A.1.2.3.2, we integrate with respect to body thickness as shown below: L 2 1 C A (2 r )dy C p cos d S0 0 (A.1.2.3.6.1) where dy denotes that we are integrating with respect to thickness, lengthwise along the rocket. Figure A.1.2.3.6.1 provides a visual example. Fig. A.1.2.3.6.1, Axial force acting along the launch vehicle body (Alex Woods) CP_Linear_two.m calculates value in a similar fashion to the normal force, with the major exception being that we left out the integration around the launch vehicle (leaving the analysis in two dimensions). We did this in order to more accurately fit our results to historical data, which was larger than we were predicting. These differences may have been in part due to viscous or separation effects along the vehicle body. Author: Alex Woods 14 A.1.2.3.2: Aerodynamic Forces Fig. A.1.2.3.6.2, Variation of axial force coefficient vs. angle of attack for a 3 stage LV (Alex Woods) Fig, A.1.2.3.6.3, Variation of CA with Mach number for a 3 stage LV (Alex Woods) The model axial force coefficient does not change with angle of attack. This is consistent with historical and experimental data.3 These results should be reasonable up to at least α = 10º, and the non-linearity experienced afterwards is not very significant. Author: Alex Woods 15 A.1.2.3.2: Aerodynamic Forces We find that the axial force coefficient for a range of mach numbers is fairly accurate when compared to historical data. The exception to this is that the Vanguard results have a decrease in drag for the middle of the subsonic region, while our model predicts a small increase. Recall as well that the transonic results from our model are not to be trusted. The axial force coefficient can be used to find a simple drag value by using the equation: CD CN sin( ) CA cos( ) A.1.2.3.6.2 where CD is the drag coefficient for the rocket. For 0º angle of attack the drag coefficient is equal to the axial force coefficient. Eq. A.1.2.3.6.2 predicts an increase in drag as angle of attack increases, as we expect. Once our model progresses past approximately 14º it no longer predicts an accurate drag, because sizable flow separations will occur on the leeward side of the rocket. Shear Stresses We find that the derivation of normal forces and pitching moments allows us to derive some of the forces working within the launch vehicle. Shear stresses and bending moments are important considerations for the structures personnel to factor in to their analysis. To provide a solution, the aerothermodynamics group developed a code called “CP_Structures.m” This code analyzes the lowest “connection point” on the rocket at any given time. We define this as the point where the skirt meets the lowest stage; for our final models this was always the top of the first stage. We first derived the theory behind the shear stress on the rocket, and ran the method by our structures contacts to promote accuracy. We define shear stress as the force of one stage acting on another in a horizontal fashion. Author: Alex Woods 16 A.1.2.3.2: Aerodynamic Forces Fig. A.1.2.3.7.1, Normal coefficient along a rocket surface (Alex Woods) The shear stress is the differential between the normal forces acting on the rocket on either side of the shearing point. This means that if the sections of the launch vehicle are causing different amounts of aerodynamic force, the differences between those sections is going to manifest as shear forces within the vehicle structure. Or more bluntly, x L 0 x 1 Shear CN CN A.1.2.3.7.1 where x is the shear point. If this value emerges negative it means that the forces acting on the lower portion of the vehicle (the first stage) are greater than those one the rest of the vehicle. CP_Structures.m is designed to ignore shoulder sections so that the shear output is for each stage along the vehicle. The maximum loads experienced are at the junction between the first stage and the upper stages. Bending Moment The bending moment is slightly more complicated to produce than the shear stresses. In principle it once again uses the normal force. Since moment = (force x distance), and each section of the vehicle geometry has a local center of pressure, we can say that the normal force acting over a section of the rocket will cause a moment acting about a point from the local CP. This can be visualized in Figure A.1.2.3.8.1 on the next page: Author: Alex Woods 17 A.1.2.3.2: Aerodynamic Forces Fig. A.1.2.3.8.1, Bending moments caused by normal forces acting at local centers of pressure (Alex Woods) If we take a point within the vehicle geometry to sum the moments about, we have an opposing moment pair causing the structure to fold in on itself. If we take nose up to be a positive pitching moment, the value for the first moment will be: Cbend ,1 CN ,1 * X CP,1 (A.1.2.3.8.1) where Cbend,1 is the portion of the bending moment caused by the upper stages, CN,1 is the normal force coefficient acting on the same section and XCP,1 is the local center of pressure. XCP,1 is negative because we take the nose tip to base direction to be positive. We then take a moment about the point caused by forces acting on the other side of the launch vehicle. Please note that XCP,2 will be positive because it is on the opposite side of the summing point: Cbend ,2 CN ,2 * X CP ,2 (A.1.2.3.8.2) .where all the variable are identical to those in A.1.2.3.8.1, but for the opposite side. These two moments can then be summed to create the overall bending moment: Cbending Cbend ,1 Cbend ,2 A.1.2.3.8.3 where Cbending is the bending moment. Since CN,2 is causing a nose down moment, this will be subtracted from the first moment, causing us to sum moments, just like what common sense would dictate. Because of the way we defined the unit vectors, the moment being output by CP_Structure is negative, but the magnitude is the same as if it were a positive moment, and just as important to the design process. Author: Alex Woods 18 A.1.2.3.2: Aerodynamic Forces References 1. Barrowman, James and Barrowman, Judith, "The Theoretical Prediction of the Center of Pressure" A NARAM 8, August 18, 1966. www.Apogeerockets.com 2. Anderson, John D., Fundamentals of Aerodynamics, Mcgraw-Hill Higher Education, 2001 3. Ashley, Holt, Engineering Analysis of Flight Vehicles, Dover Publications Inc., New York, 1974, pp. 303-312 4. Klawans, B. and Baughards, J. "The Vanguard Satellite Launching Vehicle - an engineering summary" Report No. 11022, April 1960 5. Steven Collicott, Ph.D., In personal communication regarding linearized perturbation theory, 2:00-2:30 at his office in Armstrong Hall, Purdue University on Feb. 6th 2008. 6. Marc Williams, Ph.D, Personal communication regarding pressure distribution and derivation of aerodynamic forces, 2:30-3:30 at his office in Armstrong Hall, Purdue University on Feb. 19 2008 Author: Alex Woods