Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
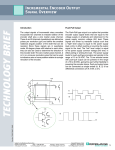
Stability Control System for a Propeller Powered by a Brushless DC Motor (BLDC) Codey Lozier Christian Thompson Advisor: Dr. Mohammad Saadeh Introduction & Objectives • This system consists of a propeller that is powered by a BLDC motor. • When the BLDC is operated, the propeller will create a lift force. • This force (if controlled properly) will allow the BLDC to move to the horizontal axis and maintain it there. • The BLDC (with the propeller) are installed at one end of a rod that is pivoting around the shaft of an encoder. • Later, another BLDC can be installed on the other side of the rod and control both motors to reach stability. • The BLDC motor is mainly used in applications where rotary motion for extended period of time is needed. • Due to their powerful performance, BLDC motors are used in remote controlled (RC) cars, helicopters, and planes. EXPERIMENTAL SETUP Components of the Design Project • Brushless dc motor (BLDC a2208) • Phidgets micro load cell • Phidgets Wheatstone bridge interface • Brushless speed controller • Incremental rotary encoder • Arduino Mega2560 Brushless DC Electric Motor A2208/12 • Rotational speed = 1800rmp/v • Max efficiency current = 8~10a (>74%) • Weight = 36g • Electrical resistance = 90mΩ • To study the lift forces generated by the BLDC, a micro load cell is used to measure this force. • First, the load cell needs to be calibrated. We used a calibration weight set to identify its readings using small weights (10g, 20g, 50g, and 100g). • Once identified, the BLDC is mounted on top of the load cell to measure the lift force generated at different operating voltages. LIFT FORCE • Of the four forces of flight, we are only concerned with two: • Lift Force and Weight Force • Opposing forces (act against one another) • Just like a propeller blade an airplanes wing is shaped with one side having more surface area (curved) than the other LIFT FORCE CONTINUED • From a side view, Air on the top side of an airplane wing has to move faster over a greater surface area to keep up with the air on the bottom. • According to Bernoulli's Principle, which states an increase in speed will result in an proportional decrease in pressure: • There must be a pressure difference between the top and bottom of the wing. LIFT FORCE CONTINUED • The result in the difference in the air pressure is a net upward force called LIFT • The air under the wing (or in our case propeller blade) moves slower and exerts more of a force than the air moving above the blade. • Since the force under the blade is greater than the force above the blade, the resulting force is UP. Hobbywing Brushless Speed Controller • Output: 30a continuous, 40a burst for 10 seconds • Input voltage: 5.6v-16.8v/2-4s • BEC (battery elimination circuit) output: 2a linear mode • Max speed: 210,000 rpm for 2 poles; 70,000 rpm for 6 poles; 35,000 rpm for 12 poles • Weight = 25g MICRO LOAD CELL • A load cell is a force sensing element. • Strain gauges mounted in precise locations measure the deformation of the cell, thus deforming the gauges. • Deformation of strain gauges results in a change in the electrical resistance. • Load cell is interfaced with the Phidgets Wheatstone Bridge Device to translate signal from load cell to a weight. Phidget Bridge • The single point load cell is mounted down at the two points shown • Force is applied in the other of the arrow on the load cell • The load cell measures the shearing effect on the beam • The Phidgetbridge allows four connections for various load cells, gauges, etc • The data values can be configured in a software Incremental Rotary Encoder • Used to measure speed, direction, and position of rotating shaft • Interfaced with the USB4 with the encoder data acquisition device • Power supply voltage 5v to 12v dc ENCODER DATA ACQUISITION DEVICE • Designed to measure 4 incremental encoders • Interfaced with rotary encoder • Includes libraries for various programming languages so users can develop their own applications • Includes application demo as a graphical user interface ARDUINO MEGA 2560 • Microcontroller board based on the ATmega2560 • Contains 54 digital I/O pins, of which 14 can be used for pulse-width modulation • Will be interfaced with micro load cell, rotary encoder, and brushless DC motor Current Progression • The experimental setup has been established. The encoder is fixed to a wooden plate using a mounting bracket. • Two couplers and two rods are connected to the encoder’s shaft. • The load cell was calibrated using a calibration weight set. Future Progression April – May 2014 • Mount the BLDC on the load cell to study the lift force generated at different operating voltages. • Select a propeller that can achieve the best lift within the range of voltage used. August – September 2014 • Setup a control algorithm with the following components: • The goal is to stabilize the output rod in the horizontal position • The encoder reading serves as a good reference point. It is used as a feedback • The driving signal is the error in encoder reading (difference between reference and actual readings) • This error controls the magnitude of the BLDC operating voltage October – November 2014 • Include a second BLDC on the other end of the rod. Repeat the control algorithm for the new two-BLDC system.