
Affine group schemes over symmetric monoidal categories
... 2009]. It is therefore natural to ask whether arithmetic geometry can be similarly developed in the general framework of symmetric monoidal categories. In particular, since the theory of finite flat group schemes is closely linked to arithmetic (see [Tate 1997], for instance), they are a natural sta ...
... 2009]. It is therefore natural to ask whether arithmetic geometry can be similarly developed in the general framework of symmetric monoidal categories. In particular, since the theory of finite flat group schemes is closely linked to arithmetic (see [Tate 1997], for instance), they are a natural sta ...

Hartshorne Ch. II, §3 First Properties of Schemes
... Hartshorne Ch. II, §3 First Properties of Schemes Takumi Murayama January 20, 2014 Remark. There’s a lot of commutative algebra here; I’ve included as much of my own solutions to problems in [AM69] that I’ve cited as I can. Lemma 1. Let Ui = Spec(Ai ) for i = 1, 2 be two affine neighborhoods in a sc ...
... Hartshorne Ch. II, §3 First Properties of Schemes Takumi Murayama January 20, 2014 Remark. There’s a lot of commutative algebra here; I’ve included as much of my own solutions to problems in [AM69] that I’ve cited as I can. Lemma 1. Let Ui = Spec(Ai ) for i = 1, 2 be two affine neighborhoods in a sc ...

Section 2
... Since gcd( 4, 26) 2 1 , 4 1 (mod 26) does not exist and a solution for a cannot be determined uniquely. However, we can determine two solutions to a by trial and error, namely, a = 7 and a = 20 are solutions. Since a = 7 is the only solution that satisfies the affine cipher requirement that gcd ...
... Since gcd( 4, 26) 2 1 , 4 1 (mod 26) does not exist and a solution for a cannot be determined uniquely. However, we can determine two solutions to a by trial and error, namely, a = 7 and a = 20 are solutions. Since a = 7 is the only solution that satisfies the affine cipher requirement that gcd ...

Basic Modern Algebraic Geometry
... 2. For any two objects A, B ∈ Obj(C) there is a set denoted by HomC (A, B), and referred to as the set of morphisms from A to B. 3. For any three objects A, B and C there is a rule of composition for morphisms, that is to say, a mapping HomC (A, B) × HomC (B, C) −→ HomC (A, C) denoted as (ϕ, ψ) 7→ ψ ...
... 2. For any two objects A, B ∈ Obj(C) there is a set denoted by HomC (A, B), and referred to as the set of morphisms from A to B. 3. For any three objects A, B and C there is a rule of composition for morphisms, that is to say, a mapping HomC (A, B) × HomC (B, C) −→ HomC (A, C) denoted as (ϕ, ψ) 7→ ψ ...

Some structure theorems for algebraic groups
... The above theorems have a long history. Theorem 1 was first obtained by Rosenlicht in 1956 for smooth connected algebraic groups, see [48, Sec. 5]. The version presented here is due to Demazure and Gabriel, see [22, III.3.8]. In the setting of smooth connected algebraic groups again, Theorem 2 was a ...
... The above theorems have a long history. Theorem 1 was first obtained by Rosenlicht in 1956 for smooth connected algebraic groups, see [48, Sec. 5]. The version presented here is due to Demazure and Gabriel, see [22, III.3.8]. In the setting of smooth connected algebraic groups again, Theorem 2 was a ...

Chapter IV. Quotients by group schemes. When we work with group
... X be an object of C. Throughout, we simply write X(T ) for hX (T ) = HomC (T, X). (i) A (left) action of G on X is a morphism ρ: G × X → X that induces, for every object T , a (left) action of the group G(T ) on the set X(T ). (ii) Let an action of G on X be given. A morphism q: X → Y in C is said t ...
... X be an object of C. Throughout, we simply write X(T ) for hX (T ) = HomC (T, X). (i) A (left) action of G on X is a morphism ρ: G × X → X that induces, for every object T , a (left) action of the group G(T ) on the set X(T ). (ii) Let an action of G on X be given. A morphism q: X → Y in C is said t ...
SCHEMES 01H8 Contents 1. Introduction 1 2. Locally ringed spaces
... (1) A locally ringed space (X, OX ) is a pair consisting of a topological space X and a sheaf of rings OX all of whose stalks are local rings. (2) Given a locally ringed space (X, OX ) we say that OX,x is the local ring of X at x. We denote mX,x or simply mx the maximal ideal of OX,x . Moreover, the ...
... (1) A locally ringed space (X, OX ) is a pair consisting of a topological space X and a sheaf of rings OX all of whose stalks are local rings. (2) Given a locally ringed space (X, OX ) we say that OX,x is the local ring of X at x. We denote mX,x or simply mx the maximal ideal of OX,x . Moreover, the ...

7.1. Sheaves and sheafification. The first thing we have to do to
... As the tangent spaces TX,P are all one-dimensional complex vector spaces, ϕ(P) can again be thought of as being specified by a single complex number, just as for the structure sheaf OX . The important difference (that is already visible from the definition above) is that these one-dimensional vector ...
... As the tangent spaces TX,P are all one-dimensional complex vector spaces, ϕ(P) can again be thought of as being specified by a single complex number, just as for the structure sheaf OX . The important difference (that is already visible from the definition above) is that these one-dimensional vector ...

Algebraic group actions and quotients - IMJ-PRG
... (i) π is G-invariant. (ii) π is affine and surjective. (iii) If U ⊂ Y is open then the natural map A(U ) −→ A(π −1 (U ))G is an isomorphism. (iv) If W1 , W2 are disjoint closed G-invariant subsets of X, then π(W1 ) and π(W2 ) are disjoint closed subsets of X. A good quotient is a categorical quotien ...
... (i) π is G-invariant. (ii) π is affine and surjective. (iii) If U ⊂ Y is open then the natural map A(U ) −→ A(π −1 (U ))G is an isomorphism. (iv) If W1 , W2 are disjoint closed G-invariant subsets of X, then π(W1 ) and π(W2 ) are disjoint closed subsets of X. A good quotient is a categorical quotien ...
Picard Groups of Affine Curves Victor I. Piercey University of Arizona Math 518
... embedded in projective space P2k , the result is a curve of genus 1. If all maximal ideals were principal, then all ideals would be principal (since every ideal in a Dedekind domain is a finite product of primes). This would imply that the curve has genus zero. We will see a sketch of the last impli ...
... embedded in projective space P2k , the result is a curve of genus 1. If all maximal ideals were principal, then all ideals would be principal (since every ideal in a Dedekind domain is a finite product of primes). This would imply that the curve has genus zero. We will see a sketch of the last impli ...

algebraic density property of homogeneous spaces
... In the case of a reductive G several important facts (e.g., see [Sch], [PV], [D], [G]) are collected in the following. Proposition 1. Let G be a reductive group. (1) The quotient X//G is an affine algebraic variety which is normal in the case of a normal X and the quotient morphism π : X → X//G is s ...
... In the case of a reductive G several important facts (e.g., see [Sch], [PV], [D], [G]) are collected in the following. Proposition 1. Let G be a reductive group. (1) The quotient X//G is an affine algebraic variety which is normal in the case of a normal X and the quotient morphism π : X → X//G is s ...
Closed sets and the Zariski topology
... open sets of the Zariski topology on An . Example (A1 ): The closed sets in A1 are the finite subsets of k. Therefore, if k is infinite, the Zariski topology on k is not Hausdorff. F of F ⊂ X is the Definition 1.5. In a topological space X, the closure T smallest closed set in X such that F ⊂ F . Cl ...
... open sets of the Zariski topology on An . Example (A1 ): The closed sets in A1 are the finite subsets of k. Therefore, if k is infinite, the Zariski topology on k is not Hausdorff. F of F ⊂ X is the Definition 1.5. In a topological space X, the closure T smallest closed set in X such that F ⊂ F . Cl ...

Light leaves and Lusztig`s conjecture 1 Introduction
... projectors to the indecomposables of the words of lesser lengths (in the language above, pxsn ). This implies that, if you are only interested in knowing the full set of bad primes for Soergel’s conjecture, then his algorithm is better. Our algorithm has the advantage that, although it is more diffi ...
... projectors to the indecomposables of the words of lesser lengths (in the language above, pxsn ). This implies that, if you are only interested in knowing the full set of bad primes for Soergel’s conjecture, then his algorithm is better. Our algorithm has the advantage that, although it is more diffi ...

The structure of Coh(P1) 1 Coherent sheaves
... (We assume a basic familiarity with sheaves and affine/projective schemes, but review some of the relevant concepts here. We assume the reader has seen the Spec and Proj constructions, as well as the definition of a sheaf.) Definition 1.1. Suppose X is a noetherian scheme, and F is a sheaf of module ...
... (We assume a basic familiarity with sheaves and affine/projective schemes, but review some of the relevant concepts here. We assume the reader has seen the Spec and Proj constructions, as well as the definition of a sheaf.) Definition 1.1. Suppose X is a noetherian scheme, and F is a sheaf of module ...
Publikationen - Mathematisches Institut
... Blanc, Jérémy; Hedén, Isac: The group of Cremona transformations generated by linear maps and the standard involution, in: Annales de l'institut Fourier 65, 2015, H. 6, S. 2641-2680.Blanc, Jérémy; Hedén, Isac: The group of Cremona transformations generated by linear maps and the standard involution, ...
... Blanc, Jérémy; Hedén, Isac: The group of Cremona transformations generated by linear maps and the standard involution, in: Annales de l'institut Fourier 65, 2015, H. 6, S. 2641-2680.Blanc, Jérémy; Hedén, Isac: The group of Cremona transformations generated by linear maps and the standard involution, ...

The Relationship Between Two Commutators
... Conditions (1) and (2) imply that for any A ∈ V ∗ we have p(x, y, z) = x − y + z with respect to some abelian group structure on A. We call a structure of the form hA; pi where p satisfies (1) and (2) an affine abelian group. Condition (3) says that every basic τ –operation is multilinear with resp ...
... Conditions (1) and (2) imply that for any A ∈ V ∗ we have p(x, y, z) = x − y + z with respect to some abelian group structure on A. We call a structure of the form hA; pi where p satisfies (1) and (2) an affine abelian group. Condition (3) says that every basic τ –operation is multilinear with resp ...

COMPLEX VARIETIES AND THE ANALYTIC TOPOLOGY Classical
... • the kernel of π maps isomorphically onto the span of d(t1 )x , . . . , d(tn−d )x under projection to the first n − d coordinates; • the kernel of π surjects onto the span of d(t1 )x , . . . , d(tn−d )x under projection to the first n − d coordinates; • there exist f1 , . . . , fn−d ∈ I such that t ...
... • the kernel of π maps isomorphically onto the span of d(t1 )x , . . . , d(tn−d )x under projection to the first n − d coordinates; • the kernel of π surjects onto the span of d(t1 )x , . . . , d(tn−d )x under projection to the first n − d coordinates; • there exist f1 , . . . , fn−d ∈ I such that t ...

Appendix Plank Problems
... directions in Rn . Building a relative width measure for one direction is simple: Let ` be a line of this direction, ϕ be the projection onto ` (hence ϕ(K) is a segment), and define the measure µ on K as µ(A) = |ϕ(A)|/|ϕ(K)|. On the other hand, Proposition 2 implies that relative width measures for ...
... directions in Rn . Building a relative width measure for one direction is simple: Let ` be a line of this direction, ϕ be the projection onto ` (hence ϕ(K) is a segment), and define the measure µ on K as µ(A) = |ϕ(A)|/|ϕ(K)|. On the other hand, Proposition 2 implies that relative width measures for ...

A Problem Course on Projective Planes
... Incidence structures and configurations. The geometrical notion that we will focus on, to the exclusion of notions like distance and angle, is that of incidence, i.e. the relation of points being on lines or lines passing through points. Definition 1.1. An incidence structure is a triple (P, L, I), ...
... Incidence structures and configurations. The geometrical notion that we will focus on, to the exclusion of notions like distance and angle, is that of incidence, i.e. the relation of points being on lines or lines passing through points. Definition 1.1. An incidence structure is a triple (P, L, I), ...
Chapter 8 The Log-Euclidean Framework Applied to
... More generally, if (X, d) is a metric space, for "nany α > 0 and any positive weights, w1, . . . , wn, with i=1 wi = 1, we can consider the problem of minimizing the function, x +→ ...
... More generally, if (X, d) is a metric space, for "nany α > 0 and any positive weights, w1, . . . , wn, with i=1 wi = 1, we can consider the problem of minimizing the function, x +→ ...
Chapter 1 PLANE CURVES
... for some nonzero complex number λ. The equivalence classes are the points of Pn , and one often refers to a point by giving a particular vector (x0 , ..., xn ) in its class. Points of the projective line P1 are equivalence classes of nonzero vectors (x0 , x1 ). If (x0 , x1 ) is such a vector, and x0 ...
... for some nonzero complex number λ. The equivalence classes are the points of Pn , and one often refers to a point by giving a particular vector (x0 , ..., xn ) in its class. Points of the projective line P1 are equivalence classes of nonzero vectors (x0 , x1 ). If (x0 , x1 ) is such a vector, and x0 ...

Lecture Notes
... RG = {f : G → R| f is a map of sets}. This is a ring, with addition and multiplication defined componentwise. The zero and the identity are the constant maps with value 0, respectively 1. Then GR w Spec(RG ). Proof. This follows by induction from EGA I.3.1.1. However, as it is necessary in the subse ...
... RG = {f : G → R| f is a map of sets}. This is a ring, with addition and multiplication defined componentwise. The zero and the identity are the constant maps with value 0, respectively 1. Then GR w Spec(RG ). Proof. This follows by induction from EGA I.3.1.1. However, as it is necessary in the subse ...
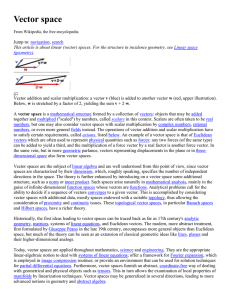
Vector space From Wikipedia, the free encyclopedia Jump to
... Vector addition and scalar multiplication: a vector v (blue) is added to another vector w (red, upper illustration). Below, w is stretched by a factor of 2, yielding the sum v + 2·w. A vector space is a mathematical structure formed by a collection of vectors: objects that may be added together and ...
... Vector addition and scalar multiplication: a vector v (blue) is added to another vector w (red, upper illustration). Below, w is stretched by a factor of 2, yielding the sum v + 2·w. A vector space is a mathematical structure formed by a collection of vectors: objects that may be added together and ...

MATH 8253 ALGEBRAIC GEOMETRY HOMEWORK 1 1.2.10. Let A
... We know that in general for a multiplicative subset S of A the prime ideals of S −1 A are in one-to-one correspondence with the prime ideals of A that do not intersect S. When S = A − p this means that the prime ideals of Ap are in one-to-one correspondence with the prime ideals of A contained in p. ...
... We know that in general for a multiplicative subset S of A the prime ideals of S −1 A are in one-to-one correspondence with the prime ideals of A that do not intersect S. When S = A − p this means that the prime ideals of Ap are in one-to-one correspondence with the prime ideals of A contained in p. ...

GENERALIZED CAYLEY`S Ω-PROCESS 1. Introduction We assume
... The correct category of representations of an affine algebraic monoid M , is the so called category of polynomial M -modules. If V is a finite dimensional k–space, we say that an action M × V → V is polynomial if the associated map M → Endk (V ) is a morphism of affine algebraic monoids, in particul ...
... The correct category of representations of an affine algebraic monoid M , is the so called category of polynomial M -modules. If V is a finite dimensional k–space, we say that an action M × V → V is polynomial if the associated map M → Endk (V ) is a morphism of affine algebraic monoids, in particul ...
Affine space

In mathematics, an affine space is a geometric structure that generalizes certain properties of parallel lines in Euclidean space. In an affine space, there is no distinguished point that serves as an origin. Hence, no vector has a fixed origin and no vector can be uniquely associated to a point. In an affine space, there are instead displacement vectors between two points of the space. Thus it makes sense to subtract two points of the space, giving a vector, but it does not make sense to add two points of the space. Likewise, it makes sense to add a vector to a point of an affine space, resulting in a new point displaced from the starting point by that vector. The simplest example of an affine space is a linear subspace of a vector space that has been translated away from the origin. In finite dimensions, such an affine subspace corresponds to the solution set of an inhomogeneous linear system. The displacement vectors for that affine space live in the solution set of the corresponding homogeneous linear system, which is a linear subspace. Linear subspaces, in contrast, always contain the origin of the vector space.