Regular expressions
... Regular Expressions: the basic case • The simplest form of regular expression: a SEQUENCE OF SYMBOLS ...
... Regular Expressions: the basic case • The simplest form of regular expression: a SEQUENCE OF SYMBOLS ...

Automatic Planning – Chapter 7: Heuristic Search
... n0 ← ChildNode(problem,n,a) Insert(n0 , h(n0 ) [g(n0 ) + h(n0 )], frontier) ...
... n0 ← ChildNode(problem,n,a) Insert(n0 , h(n0 ) [g(n0 ) + h(n0 )], frontier) ...
Automatic Planning – Chapter 7: Heuristic Search
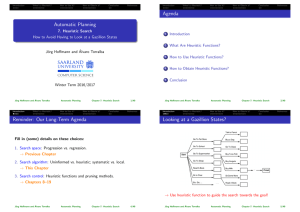
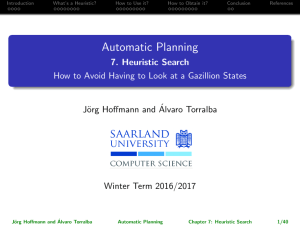
... → If h is admissible, then the solutions returned are at most a factor W more costly than the optimal ones. Bottom line: Allows to interpolate between greedy best-first search and A∗ , trading off plan quality against computational effort. Jörg Hoffmann and Álvaro Torralba ...
... → If h is admissible, then the solutions returned are at most a factor W more costly than the optimal ones. Bottom line: Allows to interpolate between greedy best-first search and A∗ , trading off plan quality against computational effort. Jörg Hoffmann and Álvaro Torralba ...
final script
... if fringe is empty then return failure node ← R EMOVE -F RONT(fringe) if G OAL -T EST(problem, S TATE(node)) then return node fringe ← I NSERTA LL(E XPAND(node, problem), fringe) function E XPAND( node, problem) returns a set of nodes successors ← the empty set for each action, result in S UCCESSOR ...
... if fringe is empty then return failure node ← R EMOVE -F RONT(fringe) if G OAL -T EST(problem, S TATE(node)) then return node fringe ← I NSERTA LL(E XPAND(node, problem), fringe) function E XPAND( node, problem) returns a set of nodes successors ← the empty set for each action, result in S UCCESSOR ...
06-Recursion
... General case: The size of the arr is greater then 1 to find the largest element in arr[a]…arr[b] - find the largest element in arr[a+1]…arr[b] and call it max - compare the elements arr[a] and max if (arr[a]>=max ) the largest element in arr[a]…arr[b] is arr[a] otherwise the largest element in arr[a ...
... General case: The size of the arr is greater then 1 to find the largest element in arr[a]…arr[b] - find the largest element in arr[a+1]…arr[b] and call it max - compare the elements arr[a] and max if (arr[a]>=max ) the largest element in arr[a]…arr[b] is arr[a] otherwise the largest element in arr[a ...

NOVEL TRANSFORMATION TECHNIQUES USING Q-HEAPS WITH APPLICATIONS TO COMPUTATIONAL GEOMETRY
... output object. Doing so would result in an O(f log² n) term in the overall search complexity, where f is the output size. In this paper, we develop several techniques to handle the first two problems by making strong use of the Q-heap technique. In particular, we show that, under the RAM model used ...
... output object. Doing so would result in an O(f log² n) term in the overall search complexity, where f is the output size. In this paper, we develop several techniques to handle the first two problems by making strong use of the Q-heap technique. In particular, we show that, under the RAM model used ...
Induction and Recursion 093 ICS 253: Discrete
... Full Binary Trees • Definition: A leaf node is a node that has no children. • Definition: An internal node is a node that has one or more children. • Prove that in any full binary tree, the number of leaf nodes is one more than the number of internal nodes. ...
... Full Binary Trees • Definition: A leaf node is a node that has no children. • Definition: An internal node is a node that has one or more children. • Prove that in any full binary tree, the number of leaf nodes is one more than the number of internal nodes. ...


The Hardest Random SAT Problems
... the binary rule increases with L/N. Although the binary rule reduces search signi cantly (the peak mean number of branches goes down from approximately 6 to 1.31), it does not appear to be very e ective in the variable region. This suggests that the binary rule will not eliminate the constraint gap ...
... the binary rule increases with L/N. Although the binary rule reduces search signi cantly (the peak mean number of branches goes down from approximately 6 to 1.31), it does not appear to be very e ective in the variable region. This suggests that the binary rule will not eliminate the constraint gap ...

Guided Local Search Joins the Elite in Discrete Optimisation 1
... 3. Background: Hill-climbing 3.1. Basic Principles of Hill-climbing Due to their combinatorial explosion nature, many real life constraint optimisation problems are hard to solve using complete methods such as branch & bound [Hall 1971, Reingold et. al. 1977]. One way to contain the combinatorial ex ...
... 3. Background: Hill-climbing 3.1. Basic Principles of Hill-climbing Due to their combinatorial explosion nature, many real life constraint optimisation problems are hard to solve using complete methods such as branch & bound [Hall 1971, Reingold et. al. 1977]. One way to contain the combinatorial ex ...

Solution
... In the following, use either a direct proof (by giving values for c and n0 in the definition of big-Oh notation) or cite one of the rules given in the book or in the lecture slides. (a) Show that if f(n) is O(g(n)) and d(n) is O(h(n)), then f(n)+d(n) is O(g(n)+ h(n)). Solution Recall the de_nition o ...
... In the following, use either a direct proof (by giving values for c and n0 in the definition of big-Oh notation) or cite one of the rules given in the book or in the lecture slides. (a) Show that if f(n) is O(g(n)) and d(n) is O(h(n)), then f(n)+d(n) is O(g(n)+ h(n)). Solution Recall the de_nition o ...
User-Driven Narrative Variation in Large Story Domains using
... Choosing which node to add is then a recursive process. For each node, a child action with the largest value of the UCB equation (Eqn. 5) is chosen and expanded. When a node with unexplored child is reached (nv = 0) a new node is created for one of the unexplored children. The process then starts ag ...
... Choosing which node to add is then a recursive process. For each node, a child action with the largest value of the UCB equation (Eqn. 5) is chosen and expanded. When a node with unexplored child is reached (nv = 0) a new node is created for one of the unexplored children. The process then starts ag ...


An Online and Approximate Solver for POMDPs with Continuous
... In offline planning, the most successful approach is the point-based approach [17], [23]. Point-based approach represents the belief space with a representative set of sampled beliefs, and generate a policy by iteratively performing Bellman backup on V at the sampled beliefs rather than the entire b ...
... In offline planning, the most successful approach is the point-based approach [17], [23]. Point-based approach represents the belief space with a representative set of sampled beliefs, and generate a policy by iteratively performing Bellman backup on V at the sampled beliefs rather than the entire b ...
Basic Search
... – path cost (additive) e.g., sum of distances, number of actions executed, etc. c(x, a, y) is the step cost, assumed to be ≥ 0 • A solution is a sequence of actions leading from the initial state to a goal state ...
... – path cost (additive) e.g., sum of distances, number of actions executed, etc. c(x, a, y) is the step cost, assumed to be ≥ 0 • A solution is a sequence of actions leading from the initial state to a goal state ...

AWA* - A Window Constrained Anytime Heuristic Search
... by gradually decrementing the weight using a chosen Δ after each iteration [Likhachev et al., 2004]. Another algorithm was proposed to modify the weighted A* technique with selective commitments [Kitamura et al., 1998]. One of the major disadvantages of using the weighted A* based techniques is that ...
... by gradually decrementing the weight using a chosen Δ after each iteration [Likhachev et al., 2004]. Another algorithm was proposed to modify the weighted A* technique with selective commitments [Kitamura et al., 1998]. One of the major disadvantages of using the weighted A* based techniques is that ...

EppDm4_11_03
... is the nature of the input data. For instance, a program that searches sequentially through a list of length n to find a data item requires only one step if the item is first on the list, but it uses n steps if the item is last on the list. Thus algorithms are frequently analyzed in terms of their “ ...
... is the nature of the input data. For instance, a program that searches sequentially through a list of length n to find a data item requires only one step if the item is first on the list, but it uses n steps if the item is last on the list. Thus algorithms are frequently analyzed in terms of their “ ...