LECTURES ON ERGODIC THEORY OF GROUP ACTIONS (A VON
... x : X → C that are fixed by σ, i.e. σg (x) = x, ∀g ∈ Γ, are the constant functions (a.e.). Indeed, this is clear for x ∈ L∞ X, because if σ fixes x then it fixes all its spectral decomposition (this being obtained as weak limits of polynomials in x, x∗ , which are all fixed by σ), which thus follow ...
... x : X → C that are fixed by σ, i.e. σg (x) = x, ∀g ∈ Γ, are the constant functions (a.e.). Indeed, this is clear for x ∈ L∞ X, because if σ fixes x then it fixes all its spectral decomposition (this being obtained as weak limits of polynomials in x, x∗ , which are all fixed by σ), which thus follow ...

GROUP ACTIONS 1. Introduction The symmetric groups S , alternating groups A
... It is left to the reader to check that this is an action of G on Map(X, S), and to see why we need g −1 on the right side rather than g. If G = Sn , X = {1, . . . , n} with the natural Sn -action, and S = R, then Map(X, S) = Rn : writing down a vector v = (c1 , . . . , cn ) amounts to listing the co ...
... It is left to the reader to check that this is an action of G on Map(X, S), and to see why we need g −1 on the right side rather than g. If G = Sn , X = {1, . . . , n} with the natural Sn -action, and S = R, then Map(X, S) = Rn : writing down a vector v = (c1 , . . . , cn ) amounts to listing the co ...
Examples of modular annihilator algebras
... [28]. I is a m.a. algebra by C4. Kleinecke proves that if / is any two-sided ideal of C(X) such that whenever TE J, Spé(X)(T) consists of isolated eigenvalues of finite multiplicity, then J E I [28, Theorem 1, p. 864]. By C4 any such ideal is also a m.a. algebra. Now let X be the Banach space of all ...
... [28]. I is a m.a. algebra by C4. Kleinecke proves that if / is any two-sided ideal of C(X) such that whenever TE J, Spé(X)(T) consists of isolated eigenvalues of finite multiplicity, then J E I [28, Theorem 1, p. 864]. By C4 any such ideal is also a m.a. algebra. Now let X be the Banach space of all ...
Automatic Continuity from a personal perspective Krzysztof Jarosz www.siue.edu/~kjarosz
... The same idea works for other classes of spaces and maps. For example a separating map ab = 0 ) TaTb = 0 can have only …nitely many points of discontinuity. In 2004 L. Brown & N.G. Wong described all discontinuous separating functionals on C0 (X ). Such functionals arise from prime ideals in C0 (X ) ...
... The same idea works for other classes of spaces and maps. For example a separating map ab = 0 ) TaTb = 0 can have only …nitely many points of discontinuity. In 2004 L. Brown & N.G. Wong described all discontinuous separating functionals on C0 (X ). Such functionals arise from prime ideals in C0 (X ) ...

Modal Decomposition on Nondeterministic Probabilistic Processes
... In this paper we provide a SOS [23] driven method for the decomposition of modal formulae for nondeterministic probabilistic transition systems (PTSs) [6, 24], which are a model in which nondeterminism and probability coexist. In essence, our target is to reduce the satisfaction problem of a modal f ...
... In this paper we provide a SOS [23] driven method for the decomposition of modal formulae for nondeterministic probabilistic transition systems (PTSs) [6, 24], which are a model in which nondeterminism and probability coexist. In essence, our target is to reduce the satisfaction problem of a modal f ...
Reteach
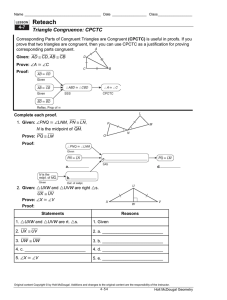
... Corresponding Parts of Congruent Triangles are Congruent (CPCTC) is useful in proofs. If you prove that two triangles are congruent, then you can use CPCTC as a justification for proving corresponding parts congruent. ...
... Corresponding Parts of Congruent Triangles are Congruent (CPCTC) is useful in proofs. If you prove that two triangles are congruent, then you can use CPCTC as a justification for proving corresponding parts congruent. ...

1 Sets and Partitions
... A set is a grouping of numbers (or people, or fruits, etc.), like {1, 2, 3}. A subset is a grouping of numbers (or people, or fruits, etc.) that may or may not contain any of the original set: {1, 3} is a subset (and it’s the same subset as {3, 1}). One subset contains all the elements, and one subs ...
... A set is a grouping of numbers (or people, or fruits, etc.), like {1, 2, 3}. A subset is a grouping of numbers (or people, or fruits, etc.) that may or may not contain any of the original set: {1, 3} is a subset (and it’s the same subset as {3, 1}). One subset contains all the elements, and one subs ...

ON BOREL SETS BELONGING TO EVERY INVARIANT
... (2) C − C does not contain a neighbourhood of the neutral element of G, (3) C − C has empty interior. Leaving aside interrelations between κ-small and perfectly κ-small sets (see, however, Proposition 3.13), in the next two results we show that all Borel subsets of 2N with any of the properties unde ...
... (2) C − C does not contain a neighbourhood of the neutral element of G, (3) C − C has empty interior. Leaving aside interrelations between κ-small and perfectly κ-small sets (see, however, Proposition 3.13), in the next two results we show that all Borel subsets of 2N with any of the properties unde ...
On the Equivalence of Certain Consequences of the Proper Forcing
... 2.1. A partially ordered set (shortly a p.o. set) is a pair (P,
... 2.1. A partially ordered set (shortly a p.o. set) is a pair (P,

A note on feasibility in Benders Decomposition
... values of (M k ) form a non-decreasing sequence of lower bounds on the optimum of (P ) and the values v(y(j)) (for feasible y(j) ) are upper bounds. The algorithm terminates when the gap between these bounds is small. Convergence of Benders Decomposition is established in [7] under the assumption th ...
... values of (M k ) form a non-decreasing sequence of lower bounds on the optimum of (P ) and the values v(y(j)) (for feasible y(j) ) are upper bounds. The algorithm terminates when the gap between these bounds is small. Convergence of Benders Decomposition is established in [7] under the assumption th ...

Two-Variable Logic over Countable Linear Orderings
... We say that a language L ⊆ A◦ is recognised by the ◦-monoid M, if there is a morphism, γ : A◦ → M and a subset S ⊆ M such that L = γ −1 (S). The syntactic ◦-monoid of a language L is the minimal ◦-monoid M recognising L that has the following universal property: any ◦-monoid recognising L has a morp ...
... We say that a language L ⊆ A◦ is recognised by the ◦-monoid M, if there is a morphism, γ : A◦ → M and a subset S ⊆ M such that L = γ −1 (S). The syntactic ◦-monoid of a language L is the minimal ◦-monoid M recognising L that has the following universal property: any ◦-monoid recognising L has a morp ...
The minimal operator module of a Banach module
... (respectively) and choose unit vectors £ = (a,£ 0 ,..., an£0) and r\ = (btf0,..., bnn0) in H" such that (x»/, £) approximates ||x||. Then, using an approximate variant of the polar decompositions a — u\a\ and b — v\b\, where a — (a,,..., an)T e Cn(A) and b — (fe,,..., bn)T e Cn(B) (as in [18, p. 48] ...
... (respectively) and choose unit vectors £ = (a,£ 0 ,..., an£0) and r\ = (btf0,..., bnn0) in H" such that (x»/, £) approximates ||x||. Then, using an approximate variant of the polar decompositions a — u\a\ and b — v\b\, where a — (a,,..., an)T e Cn(A) and b — (fe,,..., bn)T e Cn(B) (as in [18, p. 48] ...

The Proper Forcing Axiom - Cornell Math
... which uncountability is preserved and every two ℵ1 -dense sets of reals are isomorphic. In particular, two ℵ1 -dense sets of reals which may not have been isomorphic are made isomorphic by Baumgartner’s forcing. Thus while CH implies that there are many non-isomorphic ℵ1 -dense sets of reals, the re ...
... which uncountability is preserved and every two ℵ1 -dense sets of reals are isomorphic. In particular, two ℵ1 -dense sets of reals which may not have been isomorphic are made isomorphic by Baumgartner’s forcing. Thus while CH implies that there are many non-isomorphic ℵ1 -dense sets of reals, the re ...

The Proper Forcing Axiom - International Mathematical Union
... isomorphic. In particular, two ℵ1 -dense sets of reals which may not have been isomorphic are made isomorphic by Baumgartner’s forcing. Thus while CH implies that there are many non-isomorphic ℵ1 -dense sets of reals, the reason for this is simply that there is an inadequate number of embeddings bet ...
... isomorphic. In particular, two ℵ1 -dense sets of reals which may not have been isomorphic are made isomorphic by Baumgartner’s forcing. Thus while CH implies that there are many non-isomorphic ℵ1 -dense sets of reals, the reason for this is simply that there is an inadequate number of embeddings bet ...

OPERATORS OBEYING a-WEYL`S THEOREM Dragan S
... Suppose that λ ∈ σa (T + F ). Then there exists a sequence (xn )n , xn ∈ X and kxn k = 1 for all n ≥ 1, such that lim(T + F − λI)xn = 0. We can assume that lim F xn = x ∈ R(F ). Now, 0 = lim T1 (T + F − λI)xn = lim(xn + T1 F xn ). Since the limit lim T1 F xn = T1 x exists, we get lim xn = −T1 x. Sin ...
... Suppose that λ ∈ σa (T + F ). Then there exists a sequence (xn )n , xn ∈ X and kxn k = 1 for all n ≥ 1, such that lim(T + F − λI)xn = 0. We can assume that lim F xn = x ∈ R(F ). Now, 0 = lim T1 (T + F − λI)xn = lim(xn + T1 F xn ). Since the limit lim T1 F xn = T1 x exists, we get lim xn = −T1 x. Sin ...

Delaunay graphs of point sets in the plane with respect to axis
... and whose edge set consists of those pairs {p, q} ⊂ P for which there exists a closed disk that contains p and q, but does not contain any other element of P . The Delaunay graph of P is a planar graph and its dual is the Dirichlet–Voronoi diagram of P (see, e.g., [BKOS00]). As any other planar grap ...
... and whose edge set consists of those pairs {p, q} ⊂ P for which there exists a closed disk that contains p and q, but does not contain any other element of P . The Delaunay graph of P is a planar graph and its dual is the Dirichlet–Voronoi diagram of P (see, e.g., [BKOS00]). As any other planar grap ...

finitegroups.pdf
... 2. The basic posets and Quillen’s conjecture Fix a finite group G and a prime p. We define two posets. Definition 2.1. Let Sp (G) be the poset of non-trivial p-subgroups of G, ordered by inclusion. An abelian p-group is elementary abelian if every element has order 1 or p. This means that it is a ve ...
... 2. The basic posets and Quillen’s conjecture Fix a finite group G and a prime p. We define two posets. Definition 2.1. Let Sp (G) be the poset of non-trivial p-subgroups of G, ordered by inclusion. An abelian p-group is elementary abelian if every element has order 1 or p. This means that it is a ve ...
TOPOLOGICAL TRANSFORMATION GROUPS: SELECTED
... (see for example [76, 11, 4]). The G-algebra V := RUC(X) defines the corresponding Gelfand (maximal ideal) space βG X ⊂ V ∗ and the, possibly improper, maximal G-compactification iβG : X → βG X. Consider the natural homomorphism h : G → Is(RUC(X)), where Is(RUC(X)) is the group of all linear isometr ...
... (see for example [76, 11, 4]). The G-algebra V := RUC(X) defines the corresponding Gelfand (maximal ideal) space βG X ⊂ V ∗ and the, possibly improper, maximal G-compactification iβG : X → βG X. Consider the natural homomorphism h : G → Is(RUC(X)), where Is(RUC(X)) is the group of all linear isometr ...

HYPERBOLIC VOLUME AND MOD p HOMOLOGY
... the hypothesis that any three elements of π1 (M ) generate an infinite-index subgroup of π1 (M ). The latter hypothesis is actually weaker than that of Theorem A; this is because, according to [8, Proposition 1.1], if k is a positive integer and M is a closed, orientable 3-manifold such that dimZp H ...
... the hypothesis that any three elements of π1 (M ) generate an infinite-index subgroup of π1 (M ). The latter hypothesis is actually weaker than that of Theorem A; this is because, according to [8, Proposition 1.1], if k is a positive integer and M is a closed, orientable 3-manifold such that dimZp H ...

introduction to banach algebras and the gelfand
... A = Her(A) ⊕ Her− (A) In general, N or(A) is not a subalgebra of A, though it is ∗-closed and x ∈ N or(A) → λx ∈ N or(A). It is trivial to see that: (i) for two normal elements their sum and product are normal iff each one commutes with the conjugate of the other, and ...
... A = Her(A) ⊕ Her− (A) In general, N or(A) is not a subalgebra of A, though it is ∗-closed and x ∈ N or(A) → λx ∈ N or(A). It is trivial to see that: (i) for two normal elements their sum and product are normal iff each one commutes with the conjugate of the other, and ...

ERGODIC.PDF
... (a) A0 is the set of all limit points of A. (b) cl(A) = A ∪ A0 . (This is called the closure of A). 8. A set A ⊆ X is closed under limit points if every limit point of A is in A. Fact 2.3 If X is a metric space and A ⊆ X then cl(A) is closed under limit points. That is, if x is a limit point of cl(A ...
... (a) A0 is the set of all limit points of A. (b) cl(A) = A ∪ A0 . (This is called the closure of A). 8. A set A ⊆ X is closed under limit points if every limit point of A is in A. Fact 2.3 If X is a metric space and A ⊆ X then cl(A) is closed under limit points. That is, if x is a limit point of cl(A ...

decompositions of groups of invertible elements in a ring
... We will determine when a group of invertible elements in R can be written as a product of its subgroups. This is to say, given a group G and subgroups A, B we will write G = A · B if every g ∈ G can be uniquely factorized as g = ab where a ∈ A and b ∈ B. Equivalently, G = A · B if G = {ab | a ∈ A, b ...
... We will determine when a group of invertible elements in R can be written as a product of its subgroups. This is to say, given a group G and subgroups A, B we will write G = A · B if every g ∈ G can be uniquely factorized as g = ab where a ∈ A and b ∈ B. Equivalently, G = A · B if G = {ab | a ∈ A, b ...

GROUP ACTIONS ON SETS 1. Group Actions Let X be a set and let
... G is isomorphic to the semidirect product K o H. The only remaining item of data is the homomorphism α : K → Aut(H). Since K is cyclic of order 3, the image of α has order 1 or 3. In the former case, we would have α(k)(h) = khk −1 = h for all k ∈ K and h ∈ H so that in fact the product would be the ...
... G is isomorphic to the semidirect product K o H. The only remaining item of data is the homomorphism α : K → Aut(H). Since K is cyclic of order 3, the image of α has order 1 or 3. In the former case, we would have α(k)(h) = khk −1 = h for all k ∈ K and h ∈ H so that in fact the product would be the ...

A Yabloesque paradox in epistemic game theory
... after numerals, holding beliefs about each player behind them, but not about themselves. In this case, each player i believes that each player k > i behind them has an assumption about each other player l > k behind them, and i believes that each k’s assumption is false. This statement is perfectly ...
... after numerals, holding beliefs about each player behind them, but not about themselves. In this case, each player i believes that each player k > i behind them has an assumption about each other player l > k behind them, and i believes that each k’s assumption is false. This statement is perfectly ...

Topological balls. - Mathematics and Statistics
... category so defined. This category can also be viewed as (that is, it is equivalent to) the full subcategory of complex Saks spaces in the sense of Cooper [1987] generated by those Saks spaces whose underlying normed space is complete. For that reason, we often speak of functions that preserve the a ...
... category so defined. This category can also be viewed as (that is, it is equivalent to) the full subcategory of complex Saks spaces in the sense of Cooper [1987] generated by those Saks spaces whose underlying normed space is complete. For that reason, we often speak of functions that preserve the a ...
Banach–Tarski paradox

The Banach–Tarski paradox is a theorem in set-theoretic geometry, which states the following: Given a solid ball in 3‑dimensional space, there exists a decomposition of the ball into a finite number of disjoint subsets, which can then be put back together in a different way to yield two identical copies of the original ball. Indeed, the reassembly process involves only moving the pieces around and rotating them, without changing their shape. However, the pieces themselves are not ""solids"" in the usual sense, but infinite scatterings of points. The reconstruction can work with as few as five pieces.A stronger form of the theorem implies that given any two ""reasonable"" solid objects (such as a small ball and a huge ball), either one can be reassembled into the other. This is often stated informally as ""a pea can be chopped up and reassembled into the Sun"" and called the ""pea and the Sun paradox"".The reason the Banach–Tarski theorem is called a paradox is that it contradicts basic geometric intuition. ""Doubling the ball"" by dividing it into parts and moving them around by rotations and translations, without any stretching, bending, or adding new points, seems to be impossible, since all these operations ought, intuitively speaking, to preserve the volume. The intuition that such operations preserve volumes is not mathematically absurd and it is even included in the formal definition of volumes. However, this is not applicable here, because in this case it is impossible to define the volumes of the considered subsets, as they are chosen with such a large porosity. Reassembling them reproduces a volume, which happens to be different from the volume at the start.Unlike most theorems in geometry, the proof of this result depends in a critical way on the choice of axioms for set theory. It can be proven using the axiom of choice, which allows for the construction of nonmeasurable sets, i.e., collections of points that do not have a volume in the ordinary sense, and whose construction requires an uncountable number of choices.It was shown in 2005 that the pieces in the decomposition can be chosen in such a way that they can be moved continuously into place without running into one another.