
STOP AND WAIT
... Design and Implementation The Go Back N protocol improves on PAR by allowing the sender to have more than one outstanding frame at a time by using buffers. The sender maintains a buffer of a predetermined size. If there is room in the buffer it gets a packet, stores it in the correct empty slot (seq ...
... Design and Implementation The Go Back N protocol improves on PAR by allowing the sender to have more than one outstanding frame at a time by using buffers. The sender maintains a buffer of a predetermined size. If there is room in the buffer it gets a packet, stores it in the correct empty slot (seq ...
- IEEE Mentor
... transmissions, such as the CSI Feedback Action frame, which also creates an order-of-delivery problem with respect to sequence numbers. This version of the problem can be fixed by eliminating sequence numbers obtained from these frames from the cache at a recipient, or by including those sequence nu ...
... transmissions, such as the CSI Feedback Action frame, which also creates an order-of-delivery problem with respect to sequence numbers. This version of the problem can be fixed by eliminating sequence numbers obtained from these frames from the cache at a recipient, or by including those sequence nu ...

MATH TODAY
... York material which is taught in the classroom. Grade 5 Module 6 of Engage New York covers Problem Solving with the Coordinate Plane. This newsletter will discuss Module 6, Topic A. In this topic students are introduced to the concept of a coordinate as describing the distance of a point on the line ...
... York material which is taught in the classroom. Grade 5 Module 6 of Engage New York covers Problem Solving with the Coordinate Plane. This newsletter will discuss Module 6, Topic A. In this topic students are introduced to the concept of a coordinate as describing the distance of a point on the line ...
doc - dspcsp
... commences and the frame in which the packet ends. The problem with arbitrary length payloads is there is no simple way for the IWF to detect where the TDM frame commences (it does not have the resources to search for the synchronization). This problem could be remedied by the addition of a two-byte ...
... commences and the frame in which the packet ends. The problem with arbitrary length payloads is there is no simple way for the IWF to detect where the TDM frame commences (it does not have the resources to search for the synchronization). This problem could be remedied by the addition of a two-byte ...
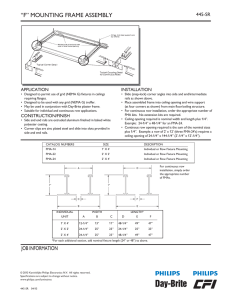
“f” mounting frame assembly
... • Couplers are included so that these may be used in continuous rows. ...
... • Couplers are included so that these may be used in continuous rows. ...
CSI Specifications
... "REPLACEMENT FRONT" NOTES: 1) Type: Hadrian Replacement Front must be offered in single-tier and double-tier design. 2) Size: Hadrian Replacement Front must be offered in 12", 15" and 18" wide, 60" and 72" high. 3) When placing orders customers to advise a) Type, b) Size, c) Color of door and frame, ...
... "REPLACEMENT FRONT" NOTES: 1) Type: Hadrian Replacement Front must be offered in single-tier and double-tier design. 2) Size: Hadrian Replacement Front must be offered in 12", 15" and 18" wide, 60" and 72" high. 3) When placing orders customers to advise a) Type, b) Size, c) Color of door and frame, ...
Spatial Modeling – some fundamentals for Robot Kinematics
... We can assign space frames (coordinate systems) to any object in space – (or all objects in space!). ...
... We can assign space frames (coordinate systems) to any object in space – (or all objects in space!). ...

Homework 6
... Problem 2. A submersion is a differentiable map between smooth manifolds π : M n+k → N n such that at each point dπ has rank n (i.e. it is surjective on tangent spaces). It follows that for each p ∈ N the preimage π −1 (p) is a smooth k-dimensional submanifold of M . Let Vq denote the tangent space ...
... Problem 2. A submersion is a differentiable map between smooth manifolds π : M n+k → N n such that at each point dπ has rank n (i.e. it is surjective on tangent spaces). It follows that for each p ∈ N the preimage π −1 (p) is a smooth k-dimensional submanifold of M . Let Vq denote the tangent space ...

view solutions for these.
... Solution. (a) S cannot be a basis for V because it is not independent: v3 = v1 − v2 . (b) Discard the vector v3 . The new set {v1 , v2 } is easily seen to be independent (we know from trigonometry that neither of these functions is a scalar multiple of the other). Moreover it has the same span as th ...
... Solution. (a) S cannot be a basis for V because it is not independent: v3 = v1 − v2 . (b) Discard the vector v3 . The new set {v1 , v2 } is easily seen to be independent (we know from trigonometry that neither of these functions is a scalar multiple of the other). Moreover it has the same span as th ...
Homework 6
... It is important to understand that the effects of special relativity are in no way due to the fact that light travels at a finite speed, but rather due to the fact that the speed of light is the same finite quantity in any inertial reference frame. We can always take into account the time it takes f ...
... It is important to understand that the effects of special relativity are in no way due to the fact that light travels at a finite speed, but rather due to the fact that the speed of light is the same finite quantity in any inertial reference frame. We can always take into account the time it takes f ...
