

Lecture 12
... Distribution Functions and Discrete Random Variables 4.1. Random Variables Definition: Let S be the sample space of an experiment. A real-valued function X : S R is called a random variable of the experiment if, for each interval I R,{s: X ( s) I } is an event. Key points: objective numerical ...
... Distribution Functions and Discrete Random Variables 4.1. Random Variables Definition: Let S be the sample space of an experiment. A real-valued function X : S R is called a random variable of the experiment if, for each interval I R,{s: X ( s) I } is an event. Key points: objective numerical ...

Introduction to the module
... Artificial Intelligence Techniques Introduction to Artificial Intelligence ...
... Artificial Intelligence Techniques Introduction to Artificial Intelligence ...

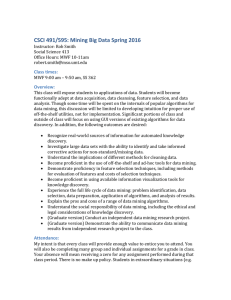
CSCI 491/595: Mining Big Data Spring 2016
... disabilities. To request reasonable program modifications, please consult with the instructor. Disability Services for Students will assist the instructor and student in the modification process. For more information, visit the Disability Services website at http://life.umt.edu/dss/. ...
... disabilities. To request reasonable program modifications, please consult with the instructor. Disability Services for Students will assist the instructor and student in the modification process. For more information, visit the Disability Services website at http://life.umt.edu/dss/. ...

Process Data Analysis
... research belongs clearly to one of those two general categories. In observational research we do not (or at least try not to) influence any variables but only measure them and look for relations (correlations) between some set of variables. In experimental research, we manipulate some variables and ...
... research belongs clearly to one of those two general categories. In observational research we do not (or at least try not to) influence any variables but only measure them and look for relations (correlations) between some set of variables. In experimental research, we manipulate some variables and ...

1 CHAPTER 2 LITERATURE REVIEW 2.1 Music Fundamentals 2.1
... Backpropagation application algorithm is used to calculate output signals. It consists only feedforward phase. The application procedure is as follows: Step 0. Initialize weights (from training algorithm) Step 1. For each input vector, do Steps 2-4 Step 2. For i=1,. . . . ,n: set activation of input ...
... Backpropagation application algorithm is used to calculate output signals. It consists only feedforward phase. The application procedure is as follows: Step 0. Initialize weights (from training algorithm) Step 1. For each input vector, do Steps 2-4 Step 2. For i=1,. . . . ,n: set activation of input ...

Machine learning and Neural Networks
... What is Machine Learning? Machine learning is the process in which a machine changes its structure, program, or data in response to external information in such a way that its expected future performance improves. Learning by machines can overlap with simpler processes, such as the addition of reco ...
... What is Machine Learning? Machine learning is the process in which a machine changes its structure, program, or data in response to external information in such a way that its expected future performance improves. Learning by machines can overlap with simpler processes, such as the addition of reco ...



Argaez-etal-Optim-Seismic - Cyber
... Interior-Point Methodology. The current Hole's algorithm does not incorporate such restrictions explicitly in the formulation of the nonlinear least squares problem. Our goal is to incorporate our optimization algorithms into the Hole's algorithm. This work is being funded by NSF CyberShare Crest Ce ...
... Interior-Point Methodology. The current Hole's algorithm does not incorporate such restrictions explicitly in the formulation of the nonlinear least squares problem. Our goal is to incorporate our optimization algorithms into the Hole's algorithm. This work is being funded by NSF CyberShare Crest Ce ...

Artificial Intelligence
... Future of Artificial Intelligence However, there is little doubt among the community that artificial machines will be capable of intelligent thought in the near future. It's just a question of what and when... The machines may be pure silicon, quantum computers or hybrid combinations of ...
... Future of Artificial Intelligence However, there is little doubt among the community that artificial machines will be capable of intelligent thought in the near future. It's just a question of what and when... The machines may be pure silicon, quantum computers or hybrid combinations of ...

Probability distributions Model selection and
... ● WIth a small amount of data, we can expect there to be more “clunkiness” and will have less accurate estimates of the parameters for the model e.g. the mean for Poisson (remember how the MOE for a survey percentage gets smaller with the more data you have). ● Independence of events and randomne ...
... ● WIth a small amount of data, we can expect there to be more “clunkiness” and will have less accurate estimates of the parameters for the model e.g. the mean for Poisson (remember how the MOE for a survey percentage gets smaller with the more data you have). ● Independence of events and randomne ...

Probabilistic Models for Unsupervised Learning
... under the posterior distribution needed for E-step of EM. It is just one of many Markov chain Monte Carlo (MCMC) methods. Easy to use if you can easily update subsets of latent variables at a time. Key questions: how many iterations per sample? how many samples? ...
... under the posterior distribution needed for E-step of EM. It is just one of many Markov chain Monte Carlo (MCMC) methods. Easy to use if you can easily update subsets of latent variables at a time. Key questions: how many iterations per sample? how many samples? ...



Automating Cognitive Model Improvement by A*Search and
... TIFF (LZW) decompressor are needed to see this picture. ...
... TIFF (LZW) decompressor are needed to see this picture. ...

Second S302 class session
... Executive Information Systems A computer application designed to be used directly by top managers, without the assistance of intermediaries, to provide the executive easy on-line access to current information about the status of the organization and its environment Now usually made available to m ...
... Executive Information Systems A computer application designed to be used directly by top managers, without the assistance of intermediaries, to provide the executive easy on-line access to current information about the status of the organization and its environment Now usually made available to m ...


Deep Blue - UMBC CSEE
... • chess: “the touchstone of the intellect” • machine would model thinking, some say • chess problem “sharply defined” • First chess-playing machine: 1760’s Maezal Chess Automaton ...
... • chess: “the touchstone of the intellect” • machine would model thinking, some say • chess problem “sharply defined” • First chess-playing machine: 1760’s Maezal Chess Automaton ...

Team Up Artificial Intelligence: liste of attendees Name of the
... Automating salesforce actions with transactions data Automating salesforce actions with transactions data Sagacify is providing services in the development of artificial intelligence solutions in order to automate the knowledge work and create man-machine collaborations in organisation. We specialis ...
... Automating salesforce actions with transactions data Automating salesforce actions with transactions data Sagacify is providing services in the development of artificial intelligence solutions in order to automate the knowledge work and create man-machine collaborations in organisation. We specialis ...

download
... Neural Java is a series of exercises and demos. Each exercise consists of a short introduction, a small demonstration program written in Java (Java Applet), and a series of questions which are intended as an invitation to play with the programs and explore the possibilities of different algorithms. ...
... Neural Java is a series of exercises and demos. Each exercise consists of a short introduction, a small demonstration program written in Java (Java Applet), and a series of questions which are intended as an invitation to play with the programs and explore the possibilities of different algorithms. ...