
3. Lie derivatives and Lie groups
... A set of m linearly independent, mutually commuting, vector fields can be taken as a coordinate basis using the parametrization as coordinates. By definition, their integral curves mesh to form a foliation (family of submanifolds). Each (m1)-D submanifold, called a leaf of the foliation, is specifi ...
... A set of m linearly independent, mutually commuting, vector fields can be taken as a coordinate basis using the parametrization as coordinates. By definition, their integral curves mesh to form a foliation (family of submanifolds). Each (m1)-D submanifold, called a leaf of the foliation, is specifi ...

PDF
... However, h1 is abelian, and hence, the above follows directly from (??). Adapting this argument in the obvious fashion we can show that Dkn+1 g ⊂ Dk h. Since h is nilpotent, g must be nilpotent as well. QED Historical remark. In the traditional formulation of Engel’s theorem, the hypotheses are the ...
... However, h1 is abelian, and hence, the above follows directly from (??). Adapting this argument in the obvious fashion we can show that Dkn+1 g ⊂ Dk h. Since h is nilpotent, g must be nilpotent as well. QED Historical remark. In the traditional formulation of Engel’s theorem, the hypotheses are the ...

PDF
... kS ◦ T k ≤ kSk kT k , kT k2 ≤ kS 2 + T 2 k . A JLB–algebra is a JB–algebra AR together with a Poisson bracket for which it becomes a Jordan–Lie algebra for some }2 ≥ 0 . Such JLB–algebras often constitute the real part of several widely studied complex associative algebras. For the purpose of quanti ...
... kS ◦ T k ≤ kSk kT k , kT k2 ≤ kS 2 + T 2 k . A JLB–algebra is a JB–algebra AR together with a Poisson bracket for which it becomes a Jordan–Lie algebra for some }2 ≥ 0 . Such JLB–algebras often constitute the real part of several widely studied complex associative algebras. For the purpose of quanti ...
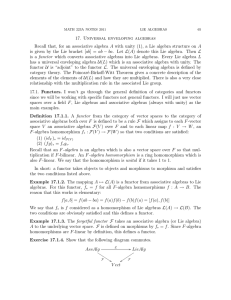
Universal enveloping algebra
... functor U is “adjoint” to the functor L. The universal enveloping algebra is defined by category theory. The Poincaré-Birkoff-Witt Theorem gives a concrete description of the elements of the elements of U(L) and how they are multiplied. There is also a very close relationship with the multiplication ...
... functor U is “adjoint” to the functor L. The universal enveloping algebra is defined by category theory. The Poincaré-Birkoff-Witt Theorem gives a concrete description of the elements of the elements of U(L) and how they are multiplied. There is also a very close relationship with the multiplication ...

INTRODUCTION TO LIE ALGEBRAS. LECTURE 7. 7. Killing form
... Lemma 7.1.2. The map Bρ is bilinear and symmetric. Proof. Bilinearity is obvious. Symmetricity follows from the well-known property of trace we have already used: Tr(f g) = Tr(gf ). ...
... Lemma 7.1.2. The map Bρ is bilinear and symmetric. Proof. Bilinearity is obvious. Symmetricity follows from the well-known property of trace we have already used: Tr(f g) = Tr(gf ). ...

Constructing Lie Algebras of First Order Differential Operators
... One step towards finding quasi-exactly solvable Hamiltonians in n dimensions consists of computing Lie algebras of first order differential operators in n variables; this is the goal of the paper at hand. We will restrict our attention to a particular type of Lie algebras of differential operators, ...
... One step towards finding quasi-exactly solvable Hamiltonians in n dimensions consists of computing Lie algebras of first order differential operators in n variables; this is the goal of the paper at hand. We will restrict our attention to a particular type of Lie algebras of differential operators, ...
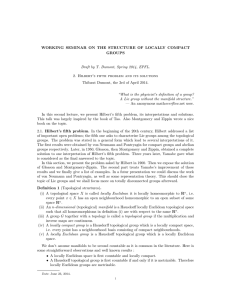
WORKING SEMINAR ON THE STRUCTURE OF LOCALLY
... exponential map plays a crucial role and we see that regularity at the identity is key in these developments. Proposition 8. Let G be a Lie groups, then G has NSS. Proof. Let U ⊂ g be a small neighbourhood of 0 such that the restriction of the exponential map to it is a diffeomorphism onto its image ...
... exponential map plays a crucial role and we see that regularity at the identity is key in these developments. Proposition 8. Let G be a Lie groups, then G has NSS. Proof. Let U ⊂ g be a small neighbourhood of 0 such that the restriction of the exponential map to it is a diffeomorphism onto its image ...

Relation to the de Rham cohomology of Lie groups
... ΩL (G) and ΩR (G) respectively. A form on G that is left and right invariant is called bi-invariant (or invariant if there is no confusion). The corresponding set is denoted by ΩI (G). The aim of this section is to prove that these different sets of invariant forms allow the determination of the co ...
... ΩL (G) and ΩR (G) respectively. A form on G that is left and right invariant is called bi-invariant (or invariant if there is no confusion). The corresponding set is denoted by ΩI (G). The aim of this section is to prove that these different sets of invariant forms allow the determination of the co ...

The Etingof-Kazhdan construction of Lie bialgebra deformations.
... Furthermore, in [EK, §6] the above is used to prove that any (quasi)triangular Lie bialgebra (not necessarily finite dimensional) admits a (quasi)triangular QUEA quantisation; once we have proved functoriality of our quantisation procedure from Section 3 it is possible to prove that the two quantisa ...
... Furthermore, in [EK, §6] the above is used to prove that any (quasi)triangular Lie bialgebra (not necessarily finite dimensional) admits a (quasi)triangular QUEA quantisation; once we have proved functoriality of our quantisation procedure from Section 3 it is possible to prove that the two quantisa ...
isacker_a2
... Closure. If g1 and g2 belong to G, then g1g2 also belongs to G. Associativity. We always have (g1g2)g3=g1(g2g3). Existence of identity element. An element 1 exists such that g1=1g=g for all elements g of G. Existence of inverse element. For each element g of G, an inverse element g-1 exists s ...
... Closure. If g1 and g2 belong to G, then g1g2 also belongs to G. Associativity. We always have (g1g2)g3=g1(g2g3). Existence of identity element. An element 1 exists such that g1=1g=g for all elements g of G. Existence of inverse element. For each element g of G, an inverse element g-1 exists s ...

THE e-HYPERSTRUCTURES AMS Classification: 20N20, 16Y99
... resp. These relations were introduced by T.Vougiouklis [15, 16]. A way to find the fundamental classes is given by theorems as the following [19, 20, 21]: Theorem 1. Let (H, ·) be an Hv -group and denote by U the set of all finite products of elements of H. We define the relation β in H by setting x ...
... resp. These relations were introduced by T.Vougiouklis [15, 16]. A way to find the fundamental classes is given by theorems as the following [19, 20, 21]: Theorem 1. Let (H, ·) be an Hv -group and denote by U the set of all finite products of elements of H. We define the relation β in H by setting x ...

Noncommutative Uniform Algebras Mati Abel and Krzysztof Jarosz
... Proof of Theorem 1. It is clear that our condition kak ≤ C,C (a) implies that ,C (ab) ≤ γ,C (a) ,C (b) , with γ = C 2 . Since the commutant Cπ is a normed real division algebra ([3] p. 127) it is isomorphic with R, C, or H. Hence by Theorem 2 any irreducible representation of A in an algebra of line ...
... Proof of Theorem 1. It is clear that our condition kak ≤ C,C (a) implies that ,C (ab) ≤ γ,C (a) ,C (b) , with γ = C 2 . Since the commutant Cπ is a normed real division algebra ([3] p. 127) it is isomorphic with R, C, or H. Hence by Theorem 2 any irreducible representation of A in an algebra of line ...

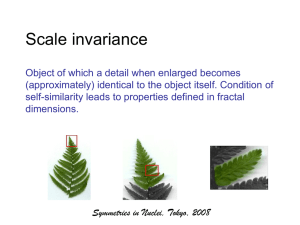
Symmetry as the Root of Degeneracy
... 4. invertability: every element a of G have an inverse a-1 that is also an element of G. That is, ∀a ∈ G, ∃ a −1 ∈ G : aa −1 = a −1a = e . A group with g elements is said to be a group of order g. While there are many examples of infinite groups (such as the set of all integers under addition, or th ...
... 4. invertability: every element a of G have an inverse a-1 that is also an element of G. That is, ∀a ∈ G, ∃ a −1 ∈ G : aa −1 = a −1a = e . A group with g elements is said to be a group of order g. While there are many examples of infinite groups (such as the set of all integers under addition, or th ...

The Tangent Space of a Lie Group – Lie Algebras • We will see that
... The Tangent Space of a Lie Group – Lie Algebras • We will see that it is possible to associate to every point of a Lie group G a real vector space, which is the tangent space of the Lie group at that point. – By use of certain diffeomorphisms on the Lie group, namely left or right translations, we w ...
... The Tangent Space of a Lie Group – Lie Algebras • We will see that it is possible to associate to every point of a Lie group G a real vector space, which is the tangent space of the Lie group at that point. – By use of certain diffeomorphisms on the Lie group, namely left or right translations, we w ...

Trivial remarks about tori.
... torus over C and L = X ∗ (T ) then for any abelian topological group W (for example, C× , or R ) there’s a canonical bijection between Π := Hom(Hom(L, W ), C× ) and R := Hom(W, Hom(L̂, C× )) (all homs are continuous group homs). So if W = k × for k a topological field, one sees that Hom(T (k), C× ) ...
... torus over C and L = X ∗ (T ) then for any abelian topological group W (for example, C× , or R ) there’s a canonical bijection between Π := Hom(Hom(L, W ), C× ) and R := Hom(W, Hom(L̂, C× )) (all homs are continuous group homs). So if W = k × for k a topological field, one sees that Hom(T (k), C× ) ...

The braid group action on the set of exceptional sequences
... For finite dimensional hereditary algebras we can use some modification for the mutations of exceptional sequences. Let Λ be a hereditary algebra and C be a complex in the derived category D b of bounded complexes of finitely generated Λ–modules. If C is indecomposable then C is isomorphic to an ind ...
... For finite dimensional hereditary algebras we can use some modification for the mutations of exceptional sequences. Let Λ be a hereditary algebra and C be a complex in the derived category D b of bounded complexes of finitely generated Λ–modules. If C is indecomposable then C is isomorphic to an ind ...

Math 249B. Unirationality 1. Introduction This handout aims to prove
... equal to the proper subspace zg (X) ⊂ g which contains X and so is not contained in V . In other words, we have found a lower-dimensional smooth connected K-subgroup H ⊂ G whose Lie algebra does not contain a specified proper K-subspace of g. Applying this procedure several times, we arrive at a fin ...
... equal to the proper subspace zg (X) ⊂ g which contains X and so is not contained in V . In other words, we have found a lower-dimensional smooth connected K-subgroup H ⊂ G whose Lie algebra does not contain a specified proper K-subspace of g. Applying this procedure several times, we arrive at a fin ...

12 Super Lie Groups and Super Lie Algebras
... of objects and morphisms, examples include the category of sets (being the objects) and functions (being the morphisms), the category of smooth manifolds (with the smooth maps as morphisms), and the category of supermanifolds. Finite products exist in all three examples, and terminal objects are, re ...
... of objects and morphisms, examples include the category of sets (being the objects) and functions (being the morphisms), the category of smooth manifolds (with the smooth maps as morphisms), and the category of supermanifolds. Finite products exist in all three examples, and terminal objects are, re ...

Signed Numbers
... Complement representation, begin with the binary representation of the positive value, complement (flip each bit if it is 0 make it 1 and visa versa) the entire positive number, and then add one. ...
... Complement representation, begin with the binary representation of the positive value, complement (flip each bit if it is 0 make it 1 and visa versa) the entire positive number, and then add one. ...
NONCOMMUTATIVE JORDAN ALGEBRAS OF
... Jordan algebra of characteristic ^ 2 is powerassociative.4 For, defining xk+1=xkx,we may prove x*x»=xK~h' by induction on ~K+n=n. Since this is true for » = 2, 3 by (4), we assume x\x^=x\+li for ajj X-L.JLl
... Jordan algebra of characteristic ^ 2 is powerassociative.4 For, defining xk+1=xkx,we may prove x*x»=xK~h' by induction on ~K+n=n. Since this is true for » = 2, 3 by (4), we assume x\x^=x\+li for ajj X-L.JLl

Automorphic Forms on Real Groups GOAL: to reformulate the theory
... Now we can restate the last two propositions using GL2 instead of SL2. Proposition: The map f 7→ φf defines an isomorphism of Mk (Γ) to the space Vk (Γ′ ) of functions φ of Z(R)Γ′ \GL2(R) satisfying: ...
... Now we can restate the last two propositions using GL2 instead of SL2. Proposition: The map f 7→ φf defines an isomorphism of Mk (Γ) to the space Vk (Γ′ ) of functions φ of Z(R)Γ′ \GL2(R) satisfying: ...

Notes
... 2) Show that Γ has 3 one-dimensional, 3 two-dimensional and 1 three-dimensional irreducible representations. 3) Prove Proposition 1.1 in this case. 1.4. Quotients. Our goal here is to show that the Kleinian singularities are actually quotients of C2 by the action of finite subgroups of SL2 (C). First ...
... 2) Show that Γ has 3 one-dimensional, 3 two-dimensional and 1 three-dimensional irreducible representations. 3) Prove Proposition 1.1 in this case. 1.4. Quotients. Our goal here is to show that the Kleinian singularities are actually quotients of C2 by the action of finite subgroups of SL2 (C). First ...

LECTURES ON SYMPLECTIC REFLECTION ALGEBRAS 2. Algebras of Crawley-Boevey and Holland
... xi y j γ, where i + j 6 n form a basis in Hc6n . Now we can take the spherical subalgebra eHc e ⊂ Hc . This algebra is filtered, we just restrict the filtration from Hc , i.e., (eHc e)6n := eHc e∩Hc6n . Equivalently, (eHc e)6n = eHc6n e. Exercise 2.8. Deduce gr eHc e = C[x, y]Γ from gr Hc = C[x, y]#Γ ...
... xi y j γ, where i + j 6 n form a basis in Hc6n . Now we can take the spherical subalgebra eHc e ⊂ Hc . This algebra is filtered, we just restrict the filtration from Hc , i.e., (eHc e)6n := eHc e∩Hc6n . Equivalently, (eHc e)6n = eHc6n e. Exercise 2.8. Deduce gr eHc e = C[x, y]Γ from gr Hc = C[x, y]#Γ ...

Section 2.1
... arity n, such that the equations hold everywhere. For example, an algebra for the theory of groups is exactly a group. A more subtle example is the theory of vector spaces over R. This is an algebraic theory with, among other things, an infinite number of operations of arity 1: for each λ ∈ R, we ha ...
... arity n, such that the equations hold everywhere. For example, an algebra for the theory of groups is exactly a group. A more subtle example is the theory of vector spaces over R. This is an algebraic theory with, among other things, an infinite number of operations of arity 1: for each λ ∈ R, we ha ...

Model theory of operator algebras
... • The model theory of an ssa algebra is very nice: If D is ssa then • it is the prime model of its theory, and • any embedding of D into a model of the theory of D is automatically elementary. • (FHRT) D is ssa iff • if whenever U is an non-principal ultrafilter on N and σ : D → D U is elementary th ...
... • The model theory of an ssa algebra is very nice: If D is ssa then • it is the prime model of its theory, and • any embedding of D into a model of the theory of D is automatically elementary. • (FHRT) D is ssa iff • if whenever U is an non-principal ultrafilter on N and σ : D → D U is elementary th ...