




dsp based implementation of field oriented control of three
... Ls=0.3153H, Lr=0.3153H and Lm=0.3H. The stator q-axis current reference is limit to 5A. The encoder type is incremental optical encoder 500 pulses per revolution. The load is give using hysteresis current brake from Magtrol Inc. DC voltage is limited to 380V, the maximum value of the Digital Motor C ...
... Ls=0.3153H, Lr=0.3153H and Lm=0.3H. The stator q-axis current reference is limit to 5A. The encoder type is incremental optical encoder 500 pulses per revolution. The load is give using hysteresis current brake from Magtrol Inc. DC voltage is limited to 380V, the maximum value of the Digital Motor C ...



D12E12Safety1\4Curr\emet
... 7.2.4 Using a triangle produced from the above objective, confirms that e= sin 0 7.2.5 Superinpose degrees and radians on the sine wave drawn in the above 7.2.5.1 Rotation 7.2.5.2 angular velocity 7.2.5.3 periodic time 7.2.5.4 frequency 7.2.5.5 peak value 7.2.5.6 amplitude 7.2.6 Deduce the expressio ...
... 7.2.4 Using a triangle produced from the above objective, confirms that e= sin 0 7.2.5 Superinpose degrees and radians on the sine wave drawn in the above 7.2.5.1 Rotation 7.2.5.2 angular velocity 7.2.5.3 periodic time 7.2.5.4 frequency 7.2.5.5 peak value 7.2.5.6 amplitude 7.2.6 Deduce the expressio ...

Appendix II
... electric current flows. Since electrical power systems have been designed to minimize the current in order to minimize line losses, the magnetic forces associated with power lines are not large. However, electrical devices such as motors, generators, transformers, relays, doorbells, etc., that need ...
... electric current flows. Since electrical power systems have been designed to minimize the current in order to minimize line losses, the magnetic forces associated with power lines are not large. However, electrical devices such as motors, generators, transformers, relays, doorbells, etc., that need ...



Lecture 9
... Increases system frequency Decreases power supplied by other, up on this one Increase in field current of one generator: ...
... Increases system frequency Decreases power supplied by other, up on this one Increase in field current of one generator: ...
6SL7 Series Tubes
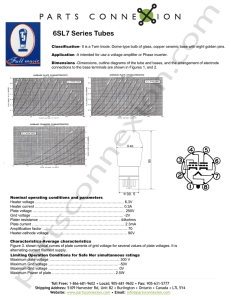
... Classification- It is a Twin triode. Dome-type bulb of glass, copper ceramic base with eight golden pins. Application -It intended for use a voltage amplifier or Phase inuerter. ...
... Classification- It is a Twin triode. Dome-type bulb of glass, copper ceramic base with eight golden pins. Application -It intended for use a voltage amplifier or Phase inuerter. ...

NATF Load Modeling Practices
... • The CMPLDW/CMLD model is NOT the “WECC” Model It is generic, and can be used across the interconnections Can provide detailed representation of dynamic load behavior, including induction motor loads ...
... • The CMPLDW/CMLD model is NOT the “WECC” Model It is generic, and can be used across the interconnections Can provide detailed representation of dynamic load behavior, including induction motor loads ...

Input Components
... schools MES and LES - which are smaller in physical size than MES types. They may be bayonet or screw cap but screw types are more common. ...
... schools MES and LES - which are smaller in physical size than MES types. They may be bayonet or screw cap but screw types are more common. ...

Automatic Speed Controller of a DC Motor Using
... VII. Conclusions From all the measurements for the experimental devices implemented in the electrical machinery workshop , can be exported appropriate modeling for each engine in order to measure the drum power to determine the duty_cycle for the desired constant speed. This contributes to the linea ...
... VII. Conclusions From all the measurements for the experimental devices implemented in the electrical machinery workshop , can be exported appropriate modeling for each engine in order to measure the drum power to determine the duty_cycle for the desired constant speed. This contributes to the linea ...


ac synchronous generators
... on the rotor (think North and South poles). The prime mover (mechanical engine) will then spin the rotor at what we will soon refer to as synchronous speed. The magnetic field sweeping past the stationary stator coils will induce voltages. This phenomenon is described by Faraday’s law, and was prese ...
... on the rotor (think North and South poles). The prime mover (mechanical engine) will then spin the rotor at what we will soon refer to as synchronous speed. The magnetic field sweeping past the stationary stator coils will induce voltages. This phenomenon is described by Faraday’s law, and was prese ...



Brass. A hard, strong, corrosion-resistant alloy made by combining
... Caterpillar drive. See magnetohydrodynamic drive. Cathode. The wire, electrode, or other conductor on a polarized electrical device through which electrical current flows out of the device. See also anode. Cathodic protection. A method of protecting metal from corrosion by making sure the metal you ...
... Caterpillar drive. See magnetohydrodynamic drive. Cathode. The wire, electrode, or other conductor on a polarized electrical device through which electrical current flows out of the device. See also anode. Cathodic protection. A method of protecting metal from corrosion by making sure the metal you ...


sot-23 bipolar transistors transistor(npn)
... Rectron Inc reserves the right to make changes without notice to any product specification herein, to make corrections, modifications, enhancements or other changes. Rectron Inc or anyone on its behalf assumes no responsibility or liability for any errors or inaccuracies. Data sheet specifications a ...
... Rectron Inc reserves the right to make changes without notice to any product specification herein, to make corrections, modifications, enhancements or other changes. Rectron Inc or anyone on its behalf assumes no responsibility or liability for any errors or inaccuracies. Data sheet specifications a ...
Stepper motor

A stepper motor or step motor or stepping motor is a brushless DC electric motor that divides a full rotation into a number of equal steps. The motor's position can then be commanded to move and hold at one of these steps without any feedback sensor (an open-loop controller), as long as the motor is carefully sized to the application in respect to torque and speed.Switched reluctance motors are very large stepping motors with a reduced pole count, and generally are closed-loop commutated.