
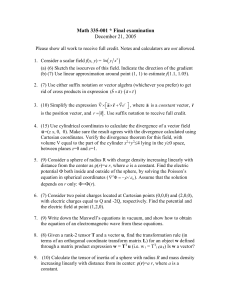
Applied Math 9 are two ways to describe a line. If the line is not
... Describe this plane also by a function with x1 and x2 the independent variables, and x3 the dependent variable. 2. A convenient way to describe lines in dimension higher than 2 is also as a set of points. The set ...
... Describe this plane also by a function with x1 and x2 the independent variables, and x3 the dependent variable. 2. A convenient way to describe lines in dimension higher than 2 is also as a set of points. The set ...

Ch. 6 Notes - Glassboro Public Schools
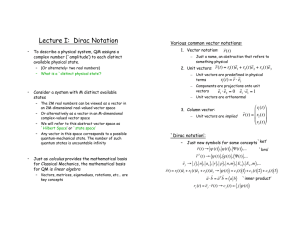
... If u is a unit vector such that is the angle (measured counterclockwise) from the positive x-axis to u, then the terminal point of u lies on the unit circle and you have u = x, y = cos , sin = (cos )i + (sin )j The angle is the direction angle of the vector u. ...
... If u is a unit vector such that is the angle (measured counterclockwise) from the positive x-axis to u, then the terminal point of u lies on the unit circle and you have u = x, y = cos , sin = (cos )i + (sin )j The angle is the direction angle of the vector u. ...
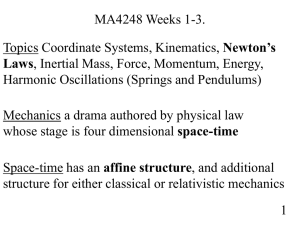
Weeks_1
... the bodies from each other are always equal in magnitude and opposite in direction Logically formulate this law by using Newton’s second law on page 84 The net force on a body is equal to the product of the bodies mass and the acceleration of the body ...
... the bodies from each other are always equal in magnitude and opposite in direction Logically formulate this law by using Newton’s second law on page 84 The net force on a body is equal to the product of the bodies mass and the acceleration of the body ...

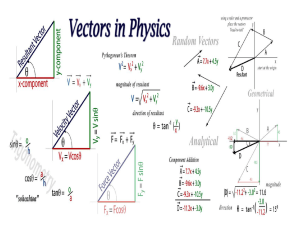
Vectors
... Note: Because you are squaring the numbers, you do not need to worrying about negatives! ...
... Note: Because you are squaring the numbers, you do not need to worrying about negatives! ...
Cross Product
... Torque Example T= R x F = RFsin() is the angle between the location of the applied force and the point where the radius meets this force. In this case, = 90, which means that the torque is just the product of the radius and the applied force because sin(90) = ...
... Torque Example T= R x F = RFsin() is the angle between the location of the applied force and the point where the radius meets this force. In this case, = 90, which means that the torque is just the product of the radius and the applied force because sin(90) = ...

SCALAR PRODUCTS, NORMS AND METRIC SPACES 1
... The norm || · ||2 is also called the standard norm, or the Euclidean norm. The norm || · ||∞| is also called the supremum norm, or the sup norm. Associated to each of these norms is the distance function it defines. Let us call these respectively d1 , d2 , d∞ . The distance d2 is the Euclidean dista ...
... The norm || · ||2 is also called the standard norm, or the Euclidean norm. The norm || · ||∞| is also called the supremum norm, or the sup norm. Associated to each of these norms is the distance function it defines. Let us call these respectively d1 , d2 , d∞ . The distance d2 is the Euclidean dista ...




Minkowski space

In mathematical physics, Minkowski space or Minkowski spacetime is a combination of Euclidean space and time into a four-dimensional manifold where the spacetime interval between any two events is independent of the inertial frame of reference in which they are recorded. Although initially developed by mathematician Hermann Minkowski for Maxwell's equations of electromagnetism, the mathematical structure of Minkowski spacetime was shown to be an immediate consequence of the postulates of special relativity.Minkowski space is closely associated with Einstein's theory of special relativity, and is the most common mathematical structure on which special relativity is formulated. While the individual components in Euclidean space and time will often differ due to length contraction and time dilation, in Minkowski spacetime, all frames of reference will agree on the total distance in spacetime between events. Because it treats time differently than the three spacial dimensions, Minkowski space differs from four-dimensional Euclidean space.The isometry group, preserving Euclidean distances of a Euclidean space equipped with the regular inner product is the Euclidean group. The analogous isometry group for Minkowski apace, preserving intervals of spacetime equipped with the associated non-positive definite bilinear form (here called the Minkowski inner product,) is the Poincaré group. The Minkowski inner product is defined as to yield the spacetime interval between two events when given their coordinate difference vector as argument.