





Tiling - Rose
... torus - euclidean plane example hyperbolic plane example Dawn & Lori’s results group theoretic surprise ...
... torus - euclidean plane example hyperbolic plane example Dawn & Lori’s results group theoretic surprise ...













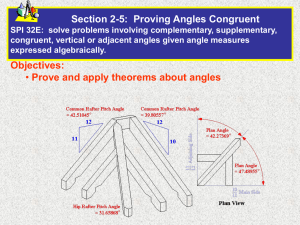
Honors Geometry Unit 2B Review Quads To be successful on this
... 13-2-2 Prove and use theorems about isosceles triangles. 14-1-1 Determine the point of concurrency of the altitudes of a triangle. 14-1-2Use the point of concurrency of the altitudes of a triangle to solve problems. 14-2-1 Determine the point of concurrency of the medians of a triangle. 14-2-2 Use t ...
... 13-2-2 Prove and use theorems about isosceles triangles. 14-1-1 Determine the point of concurrency of the altitudes of a triangle. 14-1-2Use the point of concurrency of the altitudes of a triangle to solve problems. 14-2-1 Determine the point of concurrency of the medians of a triangle. 14-2-2 Use t ...


3-6-17 math - Trousdale County Schools
... G-CO Congruence Understand congruence in terms of rigid motions 6. Use geometric descriptions of rigid motions to transform figures and to predict the effect of a given rigid motion on a given figure; given two figures, use the definition of congruence in terms of rigid motions to decide if they are ...
... G-CO Congruence Understand congruence in terms of rigid motions 6. Use geometric descriptions of rigid motions to transform figures and to predict the effect of a given rigid motion on a given figure; given two figures, use the definition of congruence in terms of rigid motions to decide if they are ...
Riemann–Roch theorem

The Riemann–Roch theorem is an important theorem in mathematics, specifically in complex analysis and algebraic geometry, for the computation of the dimension of the space of meromorphic functions with prescribed zeroes and allowed poles. It relates the complex analysis of a connected compact Riemann surface with the surface's purely topological genus g, in a way that can be carried over into purely algebraic settings.Initially proved as Riemann's inequality by Riemann (1857), the theorem reached its definitive form for Riemann surfaces after work of Riemann's short-lived student Gustav Roch (1865). It was later generalized to algebraic curves, to higher-dimensional varieties and beyond.