
ALGORITHMS FOR D-FINITE FUNCTIONS 1. Introduction A function
... explicit expression f (x) = · · · , this is not always the case for D-finite functions. Instead, D-finite functions are specified implicitly through the differential equation they satisfy, plus an appropriate number of initial values. The situation is similar to the treatment of algebraic numbers: s ...
... explicit expression f (x) = · · · , this is not always the case for D-finite functions. Instead, D-finite functions are specified implicitly through the differential equation they satisfy, plus an appropriate number of initial values. The situation is similar to the treatment of algebraic numbers: s ...

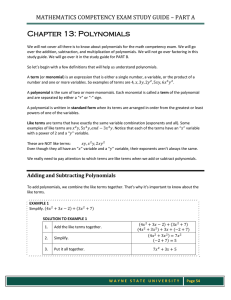

All about polynomials booklet
... Adding polynomials: add the coefficients of like terms and keep the variables and exponents the same Parenthesis are not necessary in this step, the simply separate terms to be added ...
... Adding polynomials: add the coefficients of like terms and keep the variables and exponents the same Parenthesis are not necessary in this step, the simply separate terms to be added ...

Practical Session 2
... We may operate log on both sides (log is a monotonic increasing function and thus we are allowed to do this): log(logn) ≤ ( x 1) log n log c (0.585 ) log n log c Next, we need to find values of c, , n0 , such that: log(logn) ≤ (0.585 ) log n log c Let's choose c=1: log(logn) ...
... We may operate log on both sides (log is a monotonic increasing function and thus we are allowed to do this): log(logn) ≤ ( x 1) log n log c (0.585 ) log n log c Next, we need to find values of c, , n0 , such that: log(logn) ≤ (0.585 ) log n log c Let's choose c=1: log(logn) ...


















80.47 An iterative algorithm for matrix inversion which is always
... while the latter property follows from yTAy = yTCTCy = (Cy)TCy > 0, for y non-zero, since Cy = 0 => y = 0, because C is non-singular. It follows immediately that A = CTC is a positive definite matrix and hence that the Gauss-Seidel method applied to the above equation Ax = b will always converge and ...
... while the latter property follows from yTAy = yTCTCy = (Cy)TCy > 0, for y non-zero, since Cy = 0 => y = 0, because C is non-singular. It follows immediately that A = CTC is a positive definite matrix and hence that the Gauss-Seidel method applied to the above equation Ax = b will always converge and ...
