





Notes on Vector Spaces
... 1. If V is any vector space, V is a subspace of V ; the subset consisting of the zero vector alone is a subspace of V , called the zero subspace of V . 2. If F n , the set of n-tuples (x1 , x2 , ..., xn ) with x1 = 0 is a subspace; however, the set of n-tuples with x1 = 1 + x2 is not a subspace (n ≥ ...
... 1. If V is any vector space, V is a subspace of V ; the subset consisting of the zero vector alone is a subspace of V , called the zero subspace of V . 2. If F n , the set of n-tuples (x1 , x2 , ..., xn ) with x1 = 0 is a subspace; however, the set of n-tuples with x1 = 1 + x2 is not a subspace (n ≥ ...
Lecture 9, basis - Harvard Math Department
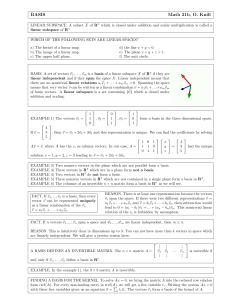
... BASIS. A set of vectors ~v1 , . . . , ~vm is a basis of a linear subspace X of Rn if they are linear independent and if they span the space X. Linear independent means that there are no nontrivial linear relations ai~v1 + . . . + am~vm = 0. Spanning the space means that very vector ~v can be written ...
... BASIS. A set of vectors ~v1 , . . . , ~vm is a basis of a linear subspace X of Rn if they are linear independent and if they span the space X. Linear independent means that there are no nontrivial linear relations ai~v1 + . . . + am~vm = 0. Spanning the space means that very vector ~v can be written ...








exam2topics.pdf
... The row, column, and nullspaces of a matrix A are therefore useful spaces (they tell us useful things about solutions to the corresponding linear system), so it is useful to have bases for them. Finding a basis for the row space. Basic idea: if B is obtained from A by elementary row operations, the ...
... The row, column, and nullspaces of a matrix A are therefore useful spaces (they tell us useful things about solutions to the corresponding linear system), so it is useful to have bases for them. Finding a basis for the row space. Basic idea: if B is obtained from A by elementary row operations, the ...

if g is an isometric transformation that takes a point P an
... z = a + Jb J2 = 1 The use of split-complex numbers dates back to 1848 when James Cockle named them “Tessarines”. William Clifford pointed out the inadequacy of simple algebraic entities, like scalars and vectors, to represent important mechanical quantities and behaviours. Vectors well describe dire ...
... z = a + Jb J2 = 1 The use of split-complex numbers dates back to 1848 when James Cockle named them “Tessarines”. William Clifford pointed out the inadequacy of simple algebraic entities, like scalars and vectors, to represent important mechanical quantities and behaviours. Vectors well describe dire ...



MATH 304 Linear Algebra Lecture 9
... subspace of R3 as it lies in the plane x + y + z = 3, which does not contain 0. • In general, a line or a plane in R3 is a subspace if and only if it passes through the origin. ...
... subspace of R3 as it lies in the plane x + y + z = 3, which does not contain 0. • In general, a line or a plane in R3 is a subspace if and only if it passes through the origin. ...

Question 1 2 3 4 5 6 7 8 9 10 Total Score
... constants such that c1 Av1 + c2 Av2 + c3 Av3 = 0 with not all ci zero. By linearity, A(c1 v1 + c2 v2 + c3 v3 ) = 0. Hence c1 v1 + c2 v2 + c3 v3 is in the nul space of A and hence c1 v1 + c2 v2 + c3 v3 = 0 by part A). Hence v1 , v2 , and v3 are linearly dependent. A common mistake was not using the f ...
... constants such that c1 Av1 + c2 Av2 + c3 Av3 = 0 with not all ci zero. By linearity, A(c1 v1 + c2 v2 + c3 v3 ) = 0. Hence c1 v1 + c2 v2 + c3 v3 is in the nul space of A and hence c1 v1 + c2 v2 + c3 v3 = 0 by part A). Hence v1 , v2 , and v3 are linearly dependent. A common mistake was not using the f ...


